地鐵車輛限界計算方法的應用與探析
2021-09-10 09:05:42王暉張競予王偉
安徽建筑 2021年9期
王暉,張競予,王偉
(1陜西鐵路工程職業技術學院,陜西 渭南 714000;2中鐵一局集團有限公司 陜西 西安 710054)
1 引言
地鐵建設是一項非常耗資的項目,在設計、施工、運營的每個重要階段,國家的投資都是必不可少的,并且每個時期投資的費用也是相當巨大的。在諸多影響造價的因素中,地鐵限界的確定都是一個不容忽視的、至關重要的影響因素。
地鐵限界是保證車輛運行安全的有效空間,是車輛與沿線固定建筑物及其設備安裝空間關系總體協調后得到的凈空尺寸圖形。地鐵限界根據車輛運行、設備安裝、土建工程各層次的功能的差別,可以區分為車輛限界、設備限界、建筑限界三種類型。這三者尺寸的大小主要取決于所取地鐵標準車的車輛輪廓線。
標準車在我國為了實現車輛的標準化,標準車又有A型車和B型車之分,B型車又包括B1型車和B2型車,它們之間的主要區別在于受電的方式不同,A型車和B2型車受電的方式是接觸網受電,B1型車受電的方式采用接觸軌受電。因此,地鐵限界也可分為A型車地鐵限界、B1型車地鐵限界、B2型車地鐵限界。在選定了具體的車型以后,車輛所處的工況不同,也將產生不同限界值。
2 車輛限界計算的基本原則和基本要素
2.1 車輛限界的計算原則
①車輛限界的計算應以列車處在平直運營線路上,并使用規定的額定速度在整體道床軌道上平穩安全地運行為先決條件,根據車體所處線路環境的不同,車輛限界可以分為隧道內車輛限界和高架線(或地面線)車輛限界兩種類型;
②曲線地段由于環境影響附加因素,不應在車輛限界計算過程中考慮,應在設備限界計算過程中考慮,主要方法就是對限界進行加寬、加高;
③車輛限界的計算參數,按其概率性質分為兩大類,即隨機因素和非隨機因素,對非隨機因素在計算的過程中應按線性相加的方法進行合成,對按高斯概率分布的隨機因素應采取均方根進行合成,將已求得的兩大類相加形成車輛的偏移量;
④對于車體處在隧道內、高架線(或者地面線)上兩類的車輛限界均適用于統一的計算公式,在限界計算時,按照不同外部條件,選擇使用不同的合理計算參數;
⑤在計算車輛限界偏移量過程中,應按車體、轉向架(構架、簧下部分、踏面、輪緣)、受電弓(受流器)不同部位分別進行計算。
2.2 車輛限界計算要素
①車輛的制造誤差值;
②車輛的維修限度;
③轉向架輪對處于軌道上的最不利運行位置;
先行者一號作為首款中國移動5G試驗產品,還將點亮更廣泛的5G行業應用場景,如車聯網、無人駕駛、工業制造、遠程醫療等,在社會經濟生產各領域提供超高帶寬、超低時延的智慧連接服務,滿足海量設備實時控制需求,助力智慧中國。
④轉向架的構架相對于輪對的橫向和豎向位移量;
⑤車體相對于轉向架構架的橫向和豎向位移量;
⑥車體相對于地鐵軌道線路最不利的傾斜位置;
⑦車輛的空重車撓度差以及豎向位移量;
⑧因車輛制造誤差、荷載的不對稱等因素引起的偏斜;
⑨車輛的一系懸掛和二系懸掛的側滾位移量;
⑩軌道線路的垂向和橫向幾何偏差、維修限度、磨耗以及彈性變形量。
3 車輛限界計算
車輛限界根據考慮的靜動態因素不一,概念也有所不同,主要有靜態車輛限界、動態車輛限界、車輛動態包絡線三種。靜態車輛限界是只考慮了靜態偏移量而計算出來的。動態車輛限界是指既考慮了靜態偏移量,又涉及動態偏移量計算出來的。動態包絡線是除了考慮動靜態兩種因素以外,還考慮了因為軌道偏移量所引起的偏移量。本文所指的車輛限界皆指車輛動態包絡線。本文在車輛限界的計算過程中,只針對整體道床車輛限界,不涉及碎石道床車輛限界,而且也只考慮機車處于直線工況上,曲線上的增加量考慮在設備限界的計算結果之內。
車輛限界計算采用概率論方法進行計算。首先,選擇車輛所處的工作環境,即車輛處在隧道內還是處在高架線(或地面線),二者的主要區別在于風力項Pw的取值不同(隧道內的取值為0,高架或地面線不為0),然后計算偏移量即可。在計算過程中,由于各個部位的影響因素不一樣,分為6個不同的部分(分為車體、構架、簧下部分、踏面、輪緣)分別進行計算,每個控制點的計算結果加上所選定的標準車輛的車輛輪廓線的坐標值即為車輛限界的坐標值。最終把各個相鄰的控制點連接而成就是車輛限界圖,計算流程如圖1所示。
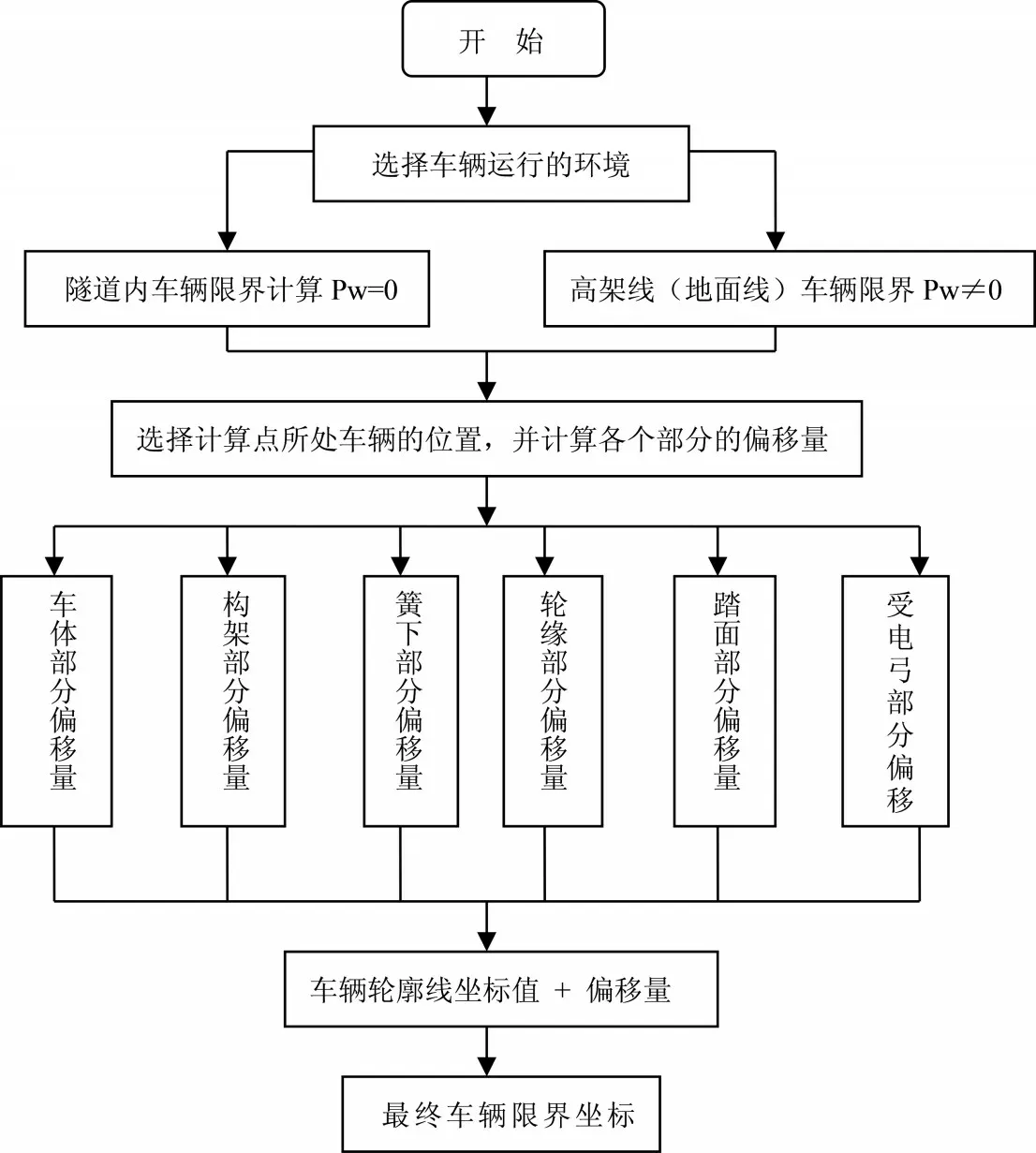
圖1 車輛限界計算流程圖
在計算時,標準車輛的類型以B2型車為例。首先,對車輛輪廓線進行初步說明是很有必要的,車輛輪廓線是計算車輛各個控制點的連線。隧道內和地面線上的控制點個數不同,當車輛處在地面線上有35個控制點,在隧道內一共只有31個控制點。區別主要在于受電弓的控制點個數不同。第0-11點為選定標準車輛車體上的控制點,第11-13為轉向架上的控制點,第14、15點為轉向架構架上的電磁感應器控制點;第16、17點為車輪踏面上的控制點;第18、19點為輪緣上的控制點;第20、21點為連接在車軸上的齒輪箱或連接在轉向架構架上的電機最低點;第22~25點為信號等預留位置點;第0s、1s、2s、3s、4s點為隧道內受電弓控制點(見圖2)。
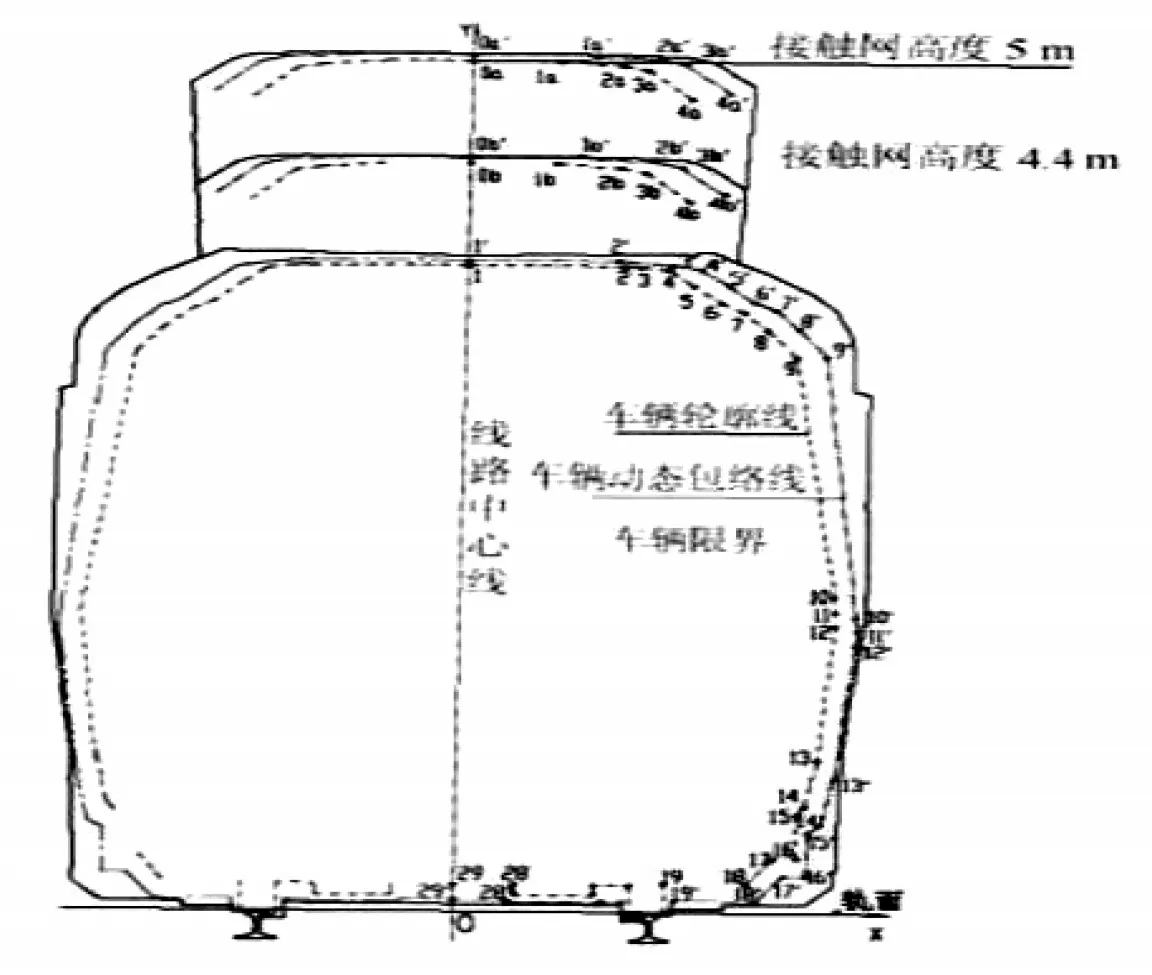
圖2 地鐵B2型車輛斷面示意圖
在車輛限界的計算過程中,主要是分析不同工況下車體橫向偏移量和豎向偏移量。搖頭振動、橫擺振動及側滾振動,這三種振動是產生橫向偏移的主要影響因素。車體豎向偏移同樣也是由三種振動產生,分別為沉浮振動、側滾振動、點頭振動。正是由于這幾種振動的存在,車輛運行過程中則會出現一個浮動空間,產生一個相對車輛輪廓線的橫向偏移值。在確定這個偏移值時,由于車體運動會產生向左或向右兩個不同方向的側滾振動,橫向偏移量計算分為車體橫向平移和車體傾角產生的橫向偏移相同時產生的偏移量,以及車體橫向平移和車體傾角產生的橫向偏移相反時產生的偏移量。在最終的計算中,選取這兩種工況下所產生的偏移量的最大值。
豎向偏移存在豎向向上和豎向向下兩種偏移量,通過對標準的分析,本人認為在23點向上的計算控制點(包括23點)在豎向的偏移量計算時采用豎向向上的偏移值。24點(包括24點)向下的計算點在計算豎向偏移量的時候采用豎向向下的偏移量,豎向向上在計算時,采用加法,豎向向下采用減法。現在以控制點5點為計算實例,首先5點處在車輛輪廓線上23點的上方位置,所以在計算時,豎向偏移量采用豎向向上的偏移量。5點的車輛輪廓線坐標值為:X=1299mm,Y=3406mm,計算時,在車體橫向平移和車體傾角產生的橫向偏移相同時,車體的橫向偏移量117mm,豎向偏移量32mm。在車體橫向平移和車體傾角產生的橫向偏移相反時,車體的橫向偏移量為23mm,豎向偏移量為71mm。由于第一種工況能夠包絡第二種工況的情況,因此最終5點的車輛限界值為:X=1299+117=1416mm,Y=3406+32=3438mm。在計算出所有點的坐標值以后,可利用Excel成圖(見圖3)。

圖3 地鐵B2型車輛限界圖
4 結束語
本文在計算方面只局限于無砟軌道的情況下,沒有涉及有砟軌道的情況。
隨著經濟的進一步發展,我國地鐵也將出現更進一步的建設浪潮,在建設和設計當中,地鐵限界的設計計算工作尤為重要,本文的介紹僅為地鐵車輛限界的設計計算,研究內容還是存在一定的局限性。因此,未來仍舊需要進一步的研究和完善。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28
制造技術與機床(2019年12期)2020-01-06 03:17:46
西南交通大學學報(2018年5期)2018-11-08 10:58:26
數學物理學報(2017年6期)2018-01-22 02:26:40
鐵道運營技術(2015年3期)2015-12-23 09:27:14
計算物理(2014年2期)2014-03-11 17:01:44
