一種NPC三電平逆變器驅(qū)動PMSM的FCS-MPTC改進(jìn)策略
2021-09-09 01:35:08劉川澤李彥哲郭小嘉
蘭州交通大學(xué)學(xué)報 2021年4期
關(guān)鍵詞:系統(tǒng)
劉川澤,李彥哲,郭小嘉
(蘭州交通大學(xué) 自動化與電氣工程學(xué)院,蘭州 730070)
相比于傳統(tǒng)兩相拓?fù)浣Y(jié)構(gòu),中點(diǎn)鉗位型(neutral point clamped,NPC)三電平逆變器具有單個開關(guān)元所承受的電壓應(yīng)力低、輸出電流總諧波失真值小和控制自由度高等優(yōu)點(diǎn),適用于各種高壓大功率領(lǐng)域[1].但NPC由于電容充、放電時間不同,存在母線電容中點(diǎn)電壓波動的問題,影響系統(tǒng)運(yùn)行的可靠性[2-3].
直接轉(zhuǎn)矩控制(direct torque control,DTC)作為主流高性能的永磁同步電機(jī)(permanent magnet synchronous motor,PMSM)控制算法,在過去幾十年一直是國內(nèi)外學(xué)者關(guān)注的熱點(diǎn)[4-5].然而傳統(tǒng)DTC算法存在穩(wěn)態(tài)性能差和轉(zhuǎn)矩脈動大等固有問題,將NPC逆變器應(yīng)用于DTC算法,由于不同扇區(qū)的電壓矢量往往不能直接切換,需要采用插入過渡電壓的方法來滿足逆變器運(yùn)行需求,由于過渡電壓與磁鏈和轉(zhuǎn)矩相互影響,存在不穩(wěn)定因素,經(jīng)常導(dǎo)致系統(tǒng)控制效果不佳,甚至放大DTC算法的缺點(diǎn)[6-7].近年來,有學(xué)者提出有限集模型預(yù)測轉(zhuǎn)矩控制(finite control set model predictive torque control,FCS-MPTC)算法,因其電磁轉(zhuǎn)矩脈動小和定子電流諧波含量小等優(yōu)點(diǎn)受到廣泛關(guān)注[8].
將FCS-MPTC應(yīng)用于NPC三電平逆變器驅(qū)動PMSM的控制系統(tǒng),只需根據(jù)切換電壓的要求實(shí)時選擇電壓控制集并預(yù)測中點(diǎn)電壓,通過目標(biāo)函數(shù)增加中點(diǎn)電位控制項,即可實(shí)現(xiàn)中點(diǎn)電壓平衡[9-10],滿足NPC三電平逆變器的運(yùn)行要求.其缺點(diǎn)是FCS-MPTC算法的運(yùn)算復(fù)雜度隨著電平數(shù)的增加將會呈指數(shù)式爆炸增長,增加了系統(tǒng)的運(yùn)行負(fù)擔(dān),雖然可以采用延長控制周期的方法進(jìn)行解決,但是由于控制算法開關(guān)頻率的減少,無法抑制較大的轉(zhuǎn)矩脈動[11].文獻(xiàn)[12-13]利用伏秒平衡原理,選擇相鄰矢量按照特定占空比合成有效虛擬電壓矢量得到參考電壓,抑制了輸出電流的低次諧波分量并簡化了算法,但使用合成矢量降低了電壓利用率.
基于此,以三相表貼式PMSM為對象,針對NPC三電平逆變器驅(qū)動系統(tǒng),采用一種無差拍算法與扇區(qū)細(xì)分方法結(jié)合的電壓矢量優(yōu)化選取策略,以降低FCS-MPTC算法的運(yùn)算量;針對三電平預(yù)測控制中點(diǎn)電壓不平衡問題,構(gòu)建考慮中點(diǎn)電壓均衡問題的目標(biāo)函數(shù),以實(shí)現(xiàn)中點(diǎn)電壓平衡控制;以誤差率評估代替?zhèn)鹘y(tǒng)的磁鏈和轉(zhuǎn)矩誤差評估,消除權(quán)重系數(shù),并考慮定子電流限幅問題,最終實(shí)現(xiàn)FCS-MPTC算法的優(yōu)化改進(jìn).
1 NPC三電平逆變器拓?fù)渑cPMSM數(shù)學(xué)模型
1.1 NPC三電平逆變器的拓?fù)浣Y(jié)構(gòu)
NPC型三電平逆變器拓?fù)浣Y(jié)構(gòu)如1所示.
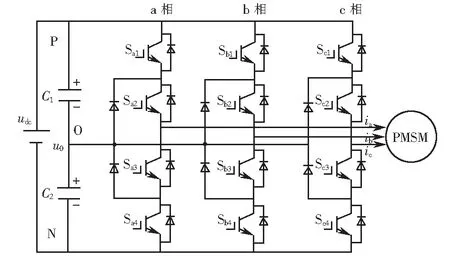
圖1 NPC型三電平逆變器容錯拓?fù)銯ig.1 NPC three-level inverter fault-tolerant topology
每相輸出三種電壓分別為udc/2、0和-udc/2.P代表著連接至母線的正端,O代表著連接至相關(guān)直流側(cè)對應(yīng)的中點(diǎn),N代表連接到相關(guān)的負(fù)端.
對于NPC三電平逆變裝置,其空間電壓矢量分布區(qū)域如圖2所示.
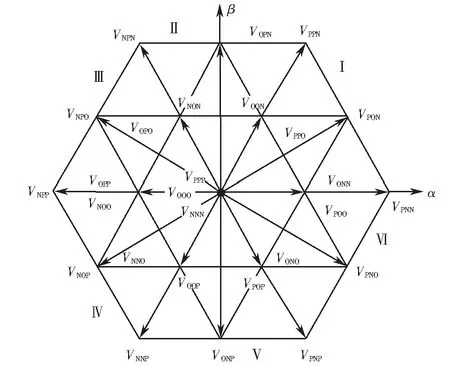
圖2 三電平逆變器的開關(guān)狀態(tài)和空間電壓矢量Fig.2 Switching state and space voltage vector of three- level inverter
1.2 PMSM數(shù)學(xué)模型
本文將表貼式PMSM視作控制對象,將鐵心損耗、阻尼繞組忽略.于是就能得到PMSM在兩相靜止坐標(biāo)系中,相應(yīng)的定子電流與磁鏈方程[14],依次為:
(1)
(2)
式中:iα和iβ分別為α-β軸電流分量;Ls為定子電感;Rs為定子電阻;ψf為永磁體磁鏈幅值;ωe為轉(zhuǎn)子電角速度;θe為轉(zhuǎn)子位置角;uα和uβ分別為α-β軸電壓分量;ψα和ψβ分別為α-β軸磁鏈分量.
定子磁鏈和電磁轉(zhuǎn)矩表達(dá)式分別為:
(3)
Te=1.5p(ψαiβ-iαψβ).
(4)
式中:ψs和Te分別為定子磁鏈和電磁轉(zhuǎn)矩;p為電機(jī)極對數(shù).
2 PMSM模型預(yù)測控制
2.1 傳統(tǒng)FCS-MPTC
利用歐拉公式對式(1)~(2)進(jìn)行離散得到離散的電流方程和磁鏈方程:
(5)
(6)
式中:Ts為系統(tǒng)采樣時間;k為當(dāng)前采樣時刻;k+1為預(yù)測時刻.
根據(jù)式(5)~(6)可以得到(k+1)Ts時間內(nèi)的定子磁鏈和電磁轉(zhuǎn)矩預(yù)測值為:
(7)
(8)
由此可見,傳統(tǒng)FCS-MPTC根據(jù)當(dāng)前時刻電流、電壓和電角速度預(yù)測下一時刻電流.在其基礎(chǔ)上,將各電壓矢量依次代入電磁轉(zhuǎn)矩和定子磁鏈預(yù)測方程,對各矢量作用下的轉(zhuǎn)矩和磁鏈進(jìn)行預(yù)測.
2.2 改進(jìn)的FCS-MPTC
因為三電平逆變器可以提供的基本電壓矢量為27個,傳統(tǒng)FCS-MPTC需要在單個周期內(nèi)借助枚取的27個開關(guān)狀態(tài)得到該預(yù)測模型的滾動優(yōu)選來獲取所需最佳電壓矢量,會造成很大處理器計算負(fù)擔(dān).對于無差拍控制而言,可以按照磁鏈誤差、轉(zhuǎn)矩來對k時間節(jié)點(diǎn)下的電壓矢量直接進(jìn)行計算[15].
忽略定子電阻壓降,施加電壓矢量所引起的定子磁鏈變化如圖3所示.
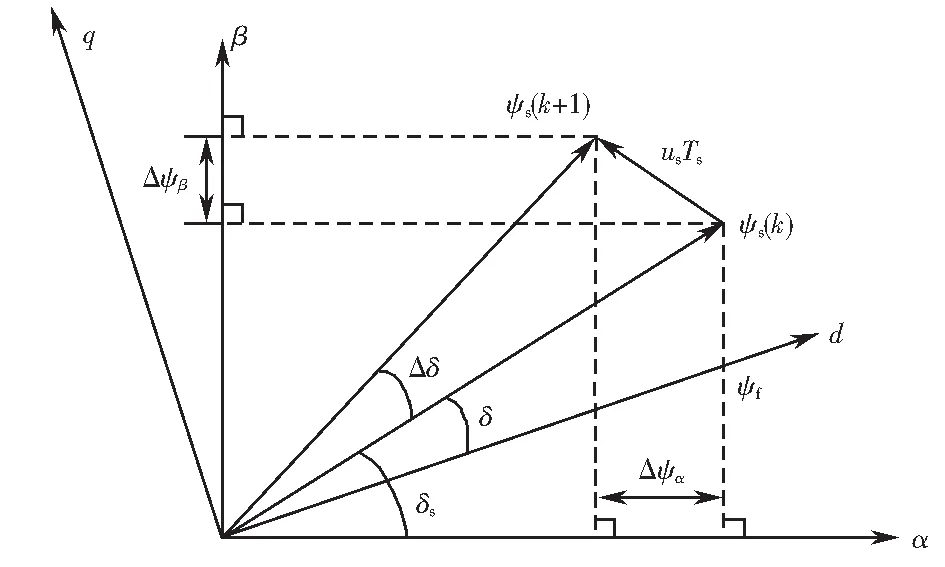
圖3 各參量之間關(guān)系Fig.3 Relationship between the parameters
三相PMSM電磁轉(zhuǎn)矩方程為
(9)
式中,δ為轉(zhuǎn)矩角.
在Ts控制周期內(nèi),電機(jī)機(jī)械時間常數(shù)要遠(yuǎn)遠(yuǎn)比電氣時間常數(shù)大,轉(zhuǎn)子位置通常有極小的變動,所以可近似認(rèn)為
sinδ≈δ.
(10)
根據(jù)一個控制周期內(nèi)的轉(zhuǎn)矩差值可計算出所需轉(zhuǎn)矩角的變化量Δδ(k)為
(11)
根據(jù)式(11)及圖3所示的空間關(guān)系可以得到一個采樣周期的定子磁鏈誤差為:
(12)
式中:Δψα和Δψβ分別為α-β軸定子磁鏈誤差分量;δs為k時刻定子磁鏈與α軸夾角.
(13)
根據(jù)式(13)可以直接計算出下一時刻需要的電壓矢量,并以此作為當(dāng)前采樣時刻的參考電壓.
2.3 扇區(qū)判斷和最優(yōu)電壓矢量選擇
通過改進(jìn)的FCS-MPTC可以直接計算出下下一時刻的電壓矢量,但是FCS-MPTC基本電壓矢量的選擇依然需要對27個基本電壓矢量進(jìn)行遍歷選取.為了進(jìn)一步減小計算量,可以先對NPC逆變器提供的空間矢量扇區(qū)進(jìn)行預(yù)判.
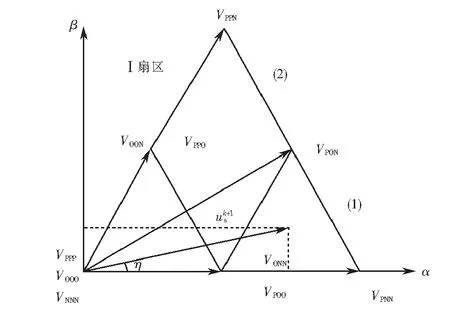
圖4 Ⅰ扇區(qū)各參量之間關(guān)系Fig.4 Relationship between parameters of sector Ⅰ
圖4中,η為電壓矢量與α軸的夾角,根據(jù)相位角η和扇區(qū)分布,可以確定電壓矢量所對應(yīng)的扇區(qū),這樣就可得到該扇區(qū)的零和非零矢量,并將這些矢量作為待選矢量.將Ⅰ扇區(qū)分為(1)和(2)兩個扇區(qū),相應(yīng)的其他扇區(qū)采用相同的細(xì)分方法,則總共分為(1)~(12)共12個扇區(qū).
2.4 考慮中點(diǎn)電壓平衡的目標(biāo)函數(shù)優(yōu)化設(shè)計
NPC三電平逆變器相較于傳統(tǒng)兩電平拓?fù)涮峁┝烁嗟碾妷菏噶浚@樣相應(yīng)的諧波含量會隨之下降.然而三電平逆變器存在中點(diǎn)電壓波動的問題.
中點(diǎn)電流不為零是中點(diǎn)電壓波動的本質(zhì)原因.中點(diǎn)電壓u0與三相電流的關(guān)系為[16]
(14)
式中:u0為中點(diǎn)電壓;|Sabc|=[|sa| |sb| |sc|]T為開關(guān)狀態(tài)組合;iabc=[iaibic]T為三相電流;C為直流測電容.
采用歐拉法對式(14)進(jìn)行離散化,可以得到NPC三電平逆變器中點(diǎn)電壓的預(yù)測模型,在目標(biāo)函數(shù)中增加對NPC逆變器中點(diǎn)電壓偏差的約束,可以實(shí)現(xiàn)三電平逆變器中點(diǎn)電壓的預(yù)測控制.
由式(14)可得中點(diǎn)電壓u0在k+1時刻的預(yù)測值為
(15)
同時,在目標(biāo)函數(shù)的設(shè)計中考慮以下兩點(diǎn)問題:
1) 改進(jìn)FCS-MPTC做了一定程度的近似處理,采用均方根差的方法得到更準(zhǔn)確的誤差對其進(jìn)行一定程度的補(bǔ)償,并將電磁轉(zhuǎn)矩和定子磁鏈的誤差改進(jìn)為相對應(yīng)的誤差率的方法,將參量處理為同一量綱,避免了權(quán)重系數(shù)的整定;
2) 考慮定子電流限幅的問題,使定子電流不至于過大,保證控制系統(tǒng)更加安全穩(wěn)定.
根據(jù)式(15)得到的中點(diǎn)電壓預(yù)測值,并將以上兩點(diǎn)期望考慮在內(nèi)的FCS-MPTC目標(biāo)函數(shù)設(shè)計為[17]
(16)

(17)
式中,imax為最大允許定子電流幅值.
2.5 系統(tǒng)延遲補(bǔ)償問題
考慮實(shí)際數(shù)控系統(tǒng),輸出參量與給定值往往存在相應(yīng)的延遲,為了避免FCS-MPTC受到該延遲的影響,可以引入一個節(jié)拍來對該延時進(jìn)行補(bǔ)償.具體目標(biāo)函數(shù)為
(18)
3 仿真研究
3.1 改進(jìn)系統(tǒng)結(jié)構(gòu)框圖
本文設(shè)計的系統(tǒng)結(jié)構(gòu)框圖如圖5所示,圖中3s/2s表示三相到兩相坐標(biāo)變換.
為了驗證所設(shè)計方案的有效性,本文以Matlab/Simulink為平臺進(jìn)行仿真研究.所用PMSM電機(jī)參數(shù)見表1.
3.2 改進(jìn)系統(tǒng)對比仿真分析
為了驗證所提改進(jìn)FCS-MPTC策略的有效性和優(yōu)越性,將改進(jìn)策略與傳統(tǒng)FCS-MPTC進(jìn)行對比分析,兩套系統(tǒng)采用完全相同的電機(jī)參數(shù),而傳統(tǒng)FCS-MPTC逆變器采用傳統(tǒng)兩相逆變器.
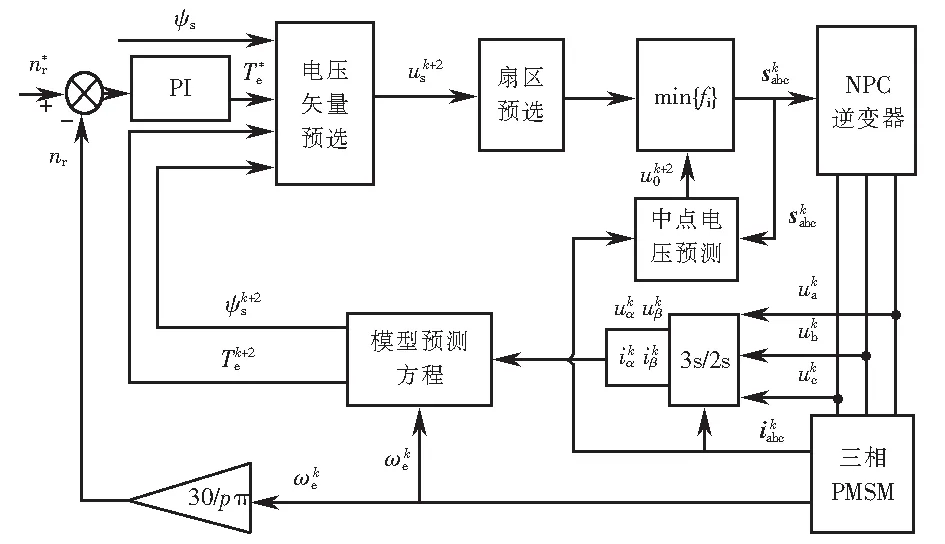
圖5 系統(tǒng)結(jié)構(gòu)框圖 Fig.5 System structure block diagram
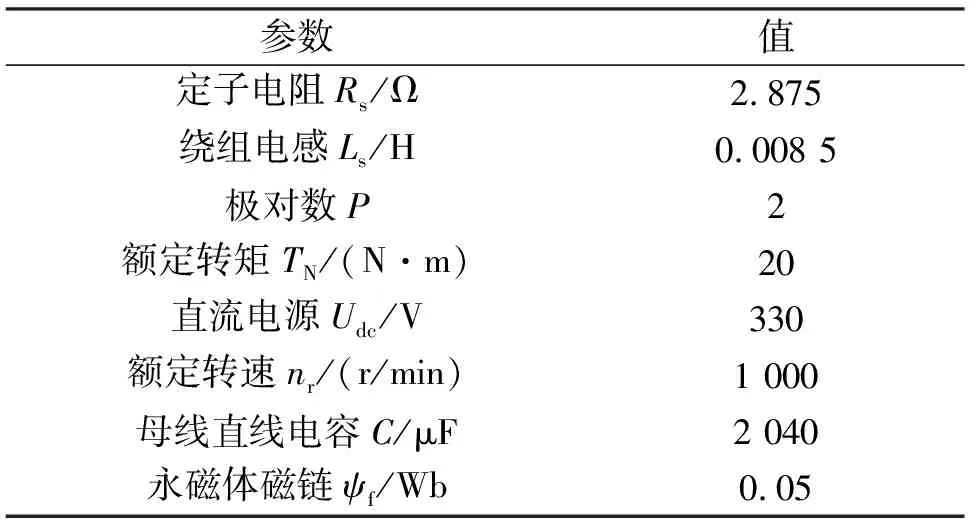
表1 電機(jī)參數(shù)
首先驗證所提策略的中點(diǎn)電壓控制效果.圖6為電機(jī)空載運(yùn)行在1 000 r/min下的中點(diǎn)電壓u0的仿真曲線.系統(tǒng)運(yùn)行至0.2 s,在目標(biāo)函數(shù)中加入母線中點(diǎn)電壓控制,可以看出,0.2 s前u0大幅偏離0 V位置,考慮到逆變器電源為300 V,u0波動最大值達(dá)到了50%,這對于系統(tǒng)是非常不安全的,0.2 s加入中點(diǎn)電壓控制之后,u0穩(wěn)定在零值左右,明顯提高了系統(tǒng)控制性能.

圖6 中點(diǎn)電壓波動曲線Fig.6 Midpoint voltage fluctuation curve
其次,比較兩種策略在負(fù)載突變時的控制效果.兩部電機(jī)均以給定轉(zhuǎn)速為1 000 r/min的情況下空載啟動,在0.2 s時突加1.5 N·m的負(fù)載,各系統(tǒng)轉(zhuǎn)速響應(yīng)如圖7~8所示.可見采用改進(jìn)策略的系統(tǒng)在負(fù)載突變時轉(zhuǎn)速小幅下降后立刻恢復(fù)到穩(wěn)定運(yùn)行狀態(tài),而采用傳統(tǒng)策略的系統(tǒng)轉(zhuǎn)速降幅和恢復(fù)時間均約為改進(jìn)策略的1.5倍,體現(xiàn)了所提策略應(yīng)對負(fù)載變化良好的魯棒性.
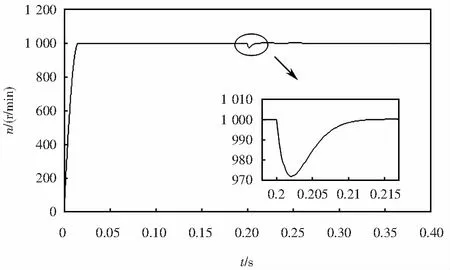
圖7 傳統(tǒng)FCS-MPTC轉(zhuǎn)速響應(yīng)Fig.7 Traditional FCS-MPTC speed response
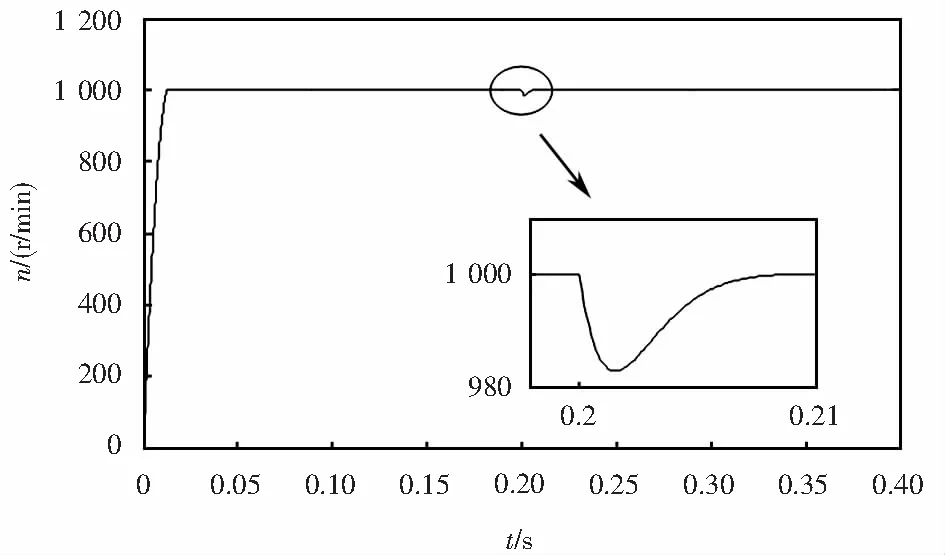
圖8 改進(jìn)FCS-MPTC轉(zhuǎn)速響應(yīng)Fig.8 Improved FCS-MPTC speed response
圖9~10為兩套系統(tǒng)磁鏈幅值變化曲線.可以看出采用改進(jìn)策略的系統(tǒng)磁鏈幅值在負(fù)載突變前后基本保持為給定值,且?guī)谉o波動,而采用傳統(tǒng)策略的系統(tǒng)磁鏈幅值在負(fù)載突變后有明顯上升,且波動幅值較大.
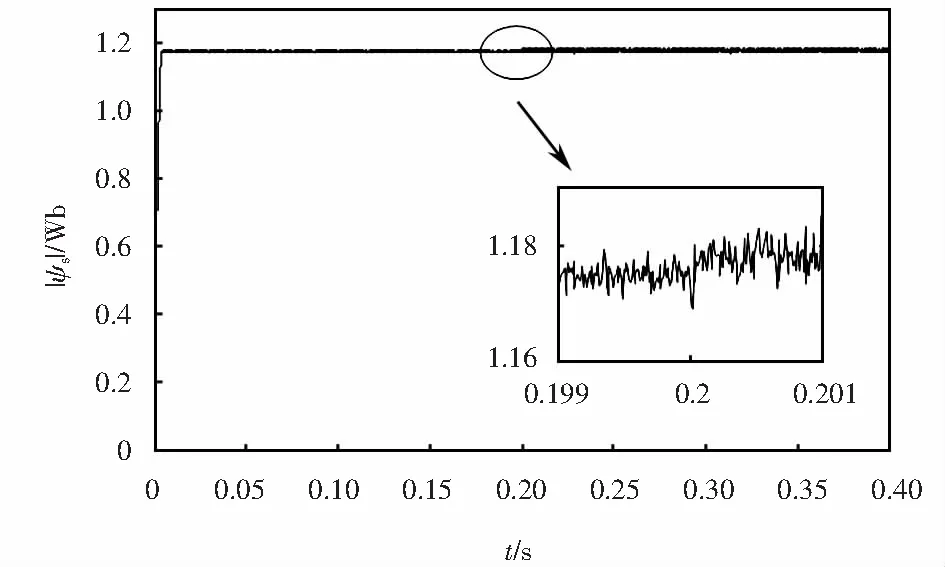
圖9 傳統(tǒng)FCS-MPTC磁鏈幅值變化曲線Fig.9 Traditional FCS-MPTC flux link amplitude change curve
圖11~12為兩套系統(tǒng)的電磁轉(zhuǎn)矩響應(yīng)曲線.可以看出,采用改進(jìn)策略的系統(tǒng)電磁轉(zhuǎn)矩脈動明顯小于采用傳統(tǒng)策略的系統(tǒng),這對于系統(tǒng)的穩(wěn)定運(yùn)行和節(jié)能問題有重要意義.
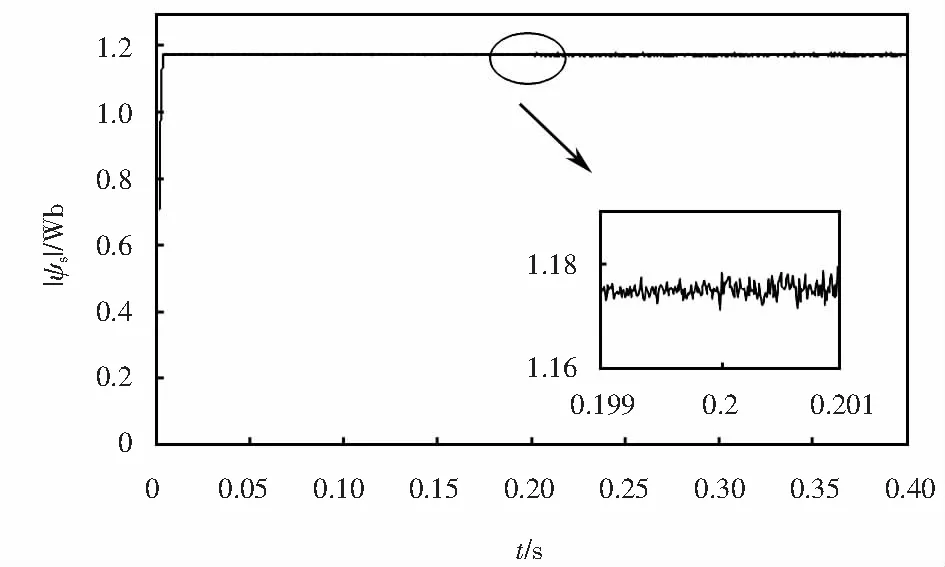
圖10 改進(jìn)FCS-MPTC磁鏈幅值變化曲線Fig.10 Improved FCS-MPTC flux linkage amplitude change curve
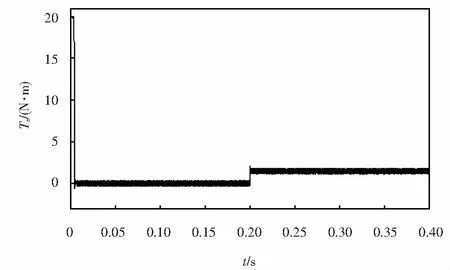
圖11 傳統(tǒng)FCS-MPTC電磁轉(zhuǎn)矩響應(yīng)Fig.11 Traditional FCS-MPTC electromagnetic torque response
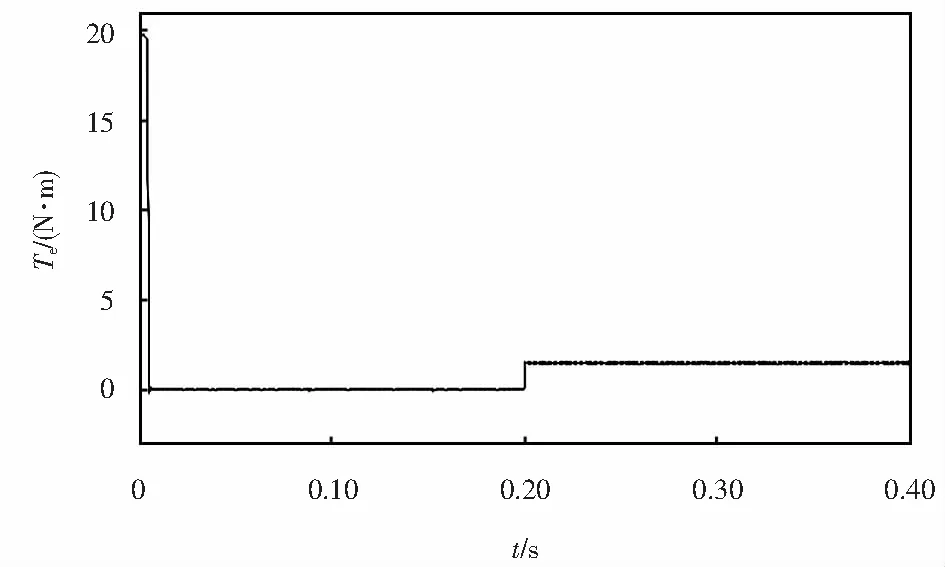
圖12 改進(jìn)FCS-MPTC電磁轉(zhuǎn)矩響應(yīng)Fig.12 Improved FCS-MPTC electromagnetic torque response
圖13~14為兩套控制系統(tǒng)的磁鏈響應(yīng),可以看出,相較于傳統(tǒng)的FCS-MPTC,通過對其優(yōu)化改進(jìn),可以將定子磁鏈軌跡與圓形更為相近,相應(yīng)的磁鏈脈動也顯著下降,穩(wěn)定性得到了明顯增長.
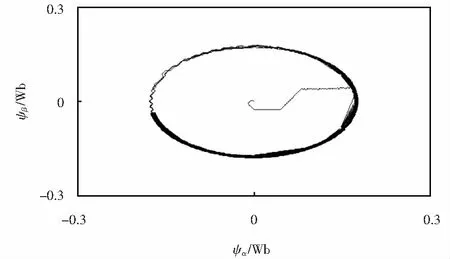
圖13 傳統(tǒng)FCS-MPTC定子磁鏈軌跡Fig.13 Traditional FCS-MPTC stator flux trajectory
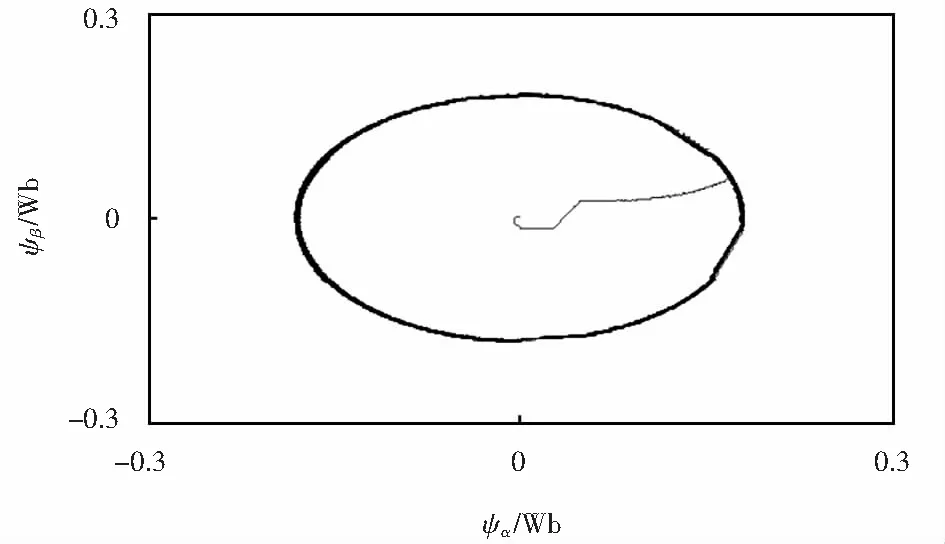
圖14 改進(jìn)FCS-MPTC定子磁鏈軌跡Fig.14 Improved FCS-MPTC stator flux trajectory
圖15~16為兩套系統(tǒng)定子電流響應(yīng),可以看出,相比于傳統(tǒng)FCS-MPTC算法,改進(jìn)的系統(tǒng)輸出定子電流波形更加穩(wěn)定平滑.由圖15~16進(jìn)行THD分析可知,采用改進(jìn)策略的系統(tǒng)三相定子電流THD均值為7.87%,而采用傳統(tǒng)策略的系統(tǒng)三相定子電流THD均值為13.24%,由此亦說明了NPC三電平逆變器因可提供更多電壓矢量,而呈現(xiàn)出更為精細(xì)的電壓控制效果.
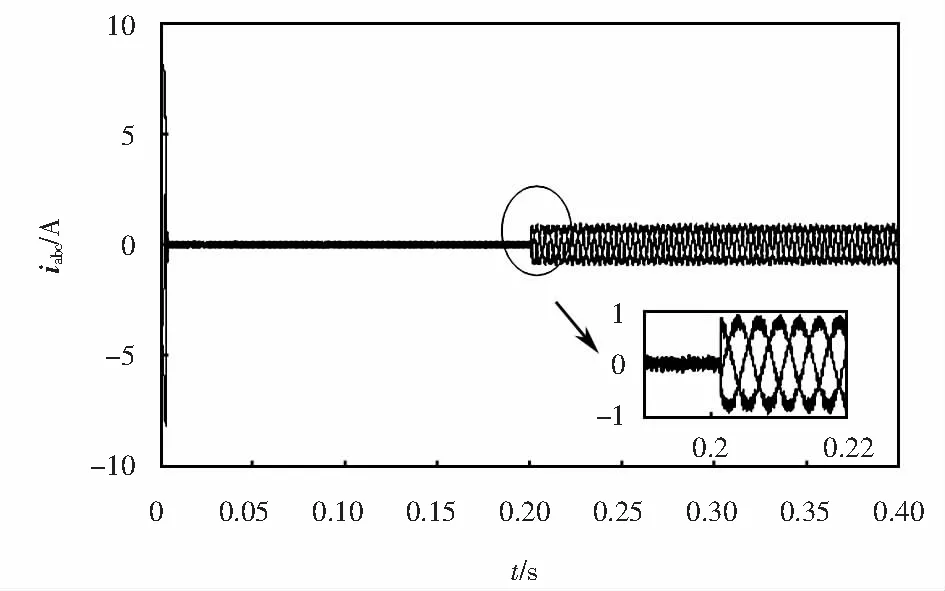
圖15 傳統(tǒng)FCS-MPTC定子電流Fig.15 Traditional FCS-MPTC stator current
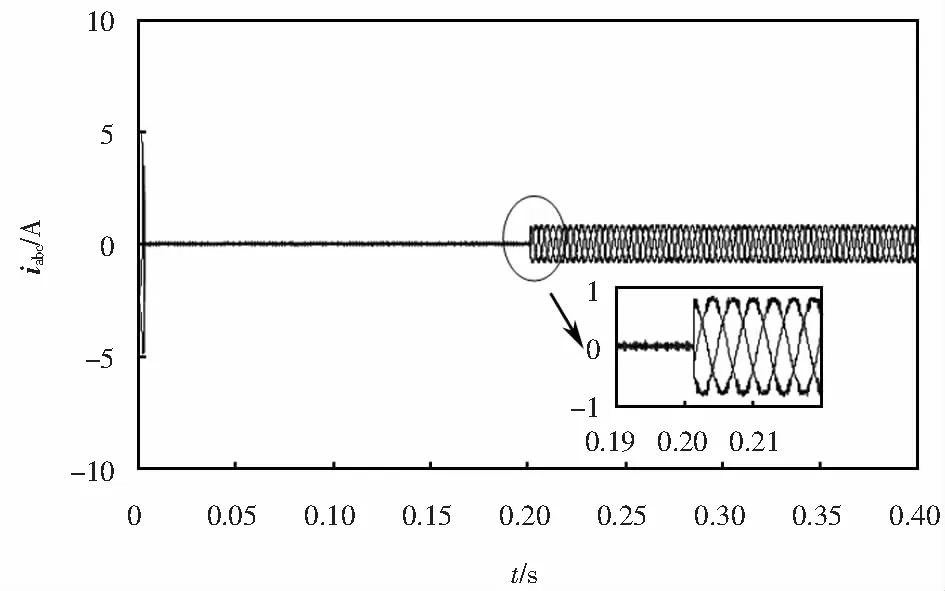
圖16 改進(jìn)FCS-MPTC定子電流Fig.16 Improved FCS-MPTC stator current
4 結(jié)論
本文針對NPC三電平逆變器驅(qū)動的PMSM系統(tǒng),提出了一種無差拍算法與扇區(qū)細(xì)分判斷方法結(jié)合的電壓矢量優(yōu)化選取策略.與傳統(tǒng)FCS-MPTC算法相比,所設(shè)計的FCS-MPTC改進(jìn)策略能夠?qū)崿F(xiàn)中點(diǎn)電壓平衡控制,有效降低了運(yùn)算量,并使得轉(zhuǎn)矩與磁鏈脈動更小,定子電流諧波失真值降低,具有良好的動靜態(tài)性能.仿真結(jié)果驗證了改進(jìn)策略的可行性和有效性.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32