基于位姿約束的工業(yè)機(jī)器人快速標(biāo)定系統(tǒng)研究
2021-08-26 11:08:26張新星張?jiān)?/span>
機(jī)械設(shè)計(jì)與制造 2021年8期
張新星,王 輝,張?jiān)?/p>
(1.衢州職業(yè)技術(shù)學(xué)院機(jī)電工程學(xué)院 浙江 衢州 324000;2.華南理工大學(xué)自動(dòng)化科學(xué)與工程學(xué)院,廣東 廣州510640;3.衢州學(xué)院機(jī)械工程學(xué)院,浙江 衢州 324000)
1 引言
工業(yè)機(jī)器人應(yīng)用領(lǐng)域越來(lái)越廣泛,為了滿足更多較高精度工作任務(wù)的需要,準(zhǔn)確地標(biāo)定出機(jī)器人的零位參數(shù)就顯得尤其重要。機(jī)器人定位精度誤差問(wèn)題來(lái)自于多個(gè)方面,其中主要來(lái)源是機(jī)器人的制造加工誤差和關(guān)節(jié)零位誤差,利用常規(guī)的標(biāo)定誤差模型,能夠較好地解決誤差問(wèn)題。機(jī)器人零位參數(shù)作為機(jī)器人參數(shù)標(biāo)定中的一種重參數(shù),可以提升機(jī)器人的性能參數(shù),滿足高精度作業(yè)的需求。
國(guó)內(nèi)外對(duì)機(jī)器人零位標(biāo)定做了很多研究,文獻(xiàn)[1]針對(duì)機(jī)器人零位進(jìn)行了深入的研究,跟蹤機(jī)器人工作空間中的激光線,在跟蹤期間記錄機(jī)器人關(guān)節(jié)角度,可以估計(jì)機(jī)器人零點(diǎn)偏移,最后使用估計(jì)值來(lái)確定機(jī)器人零位參數(shù),通過(guò)比較測(cè)量結(jié)果和運(yùn)動(dòng)學(xué)模型確定了最小二乘意義上的零偏移量[1]。但該算法主要缺點(diǎn)是耗時(shí)過(guò)長(zhǎng),方法復(fù)雜一旦其中一個(gè)環(huán)節(jié)有問(wèn)題需要重新標(biāo)定。文獻(xiàn)[2]提出了一種標(biāo)定算法,可以通過(guò)補(bǔ)償運(yùn)動(dòng)學(xué)模型相關(guān)本體參數(shù)來(lái)增強(qiáng)其零位精度。但是主要標(biāo)定效果好壞完全依賴于運(yùn)動(dòng)學(xué)模型,不具備容錯(cuò)性[2]。文獻(xiàn)[3]提出了一種在機(jī)器人上的傳感器(特別是相機(jī))的標(biāo)記方法,計(jì)算機(jī)械手速度對(duì)相機(jī)圖像中標(biāo)記定位誤差的方法[3]。文獻(xiàn)[4]提出了基于POE的串行機(jī)器人運(yùn)動(dòng)參數(shù)標(biāo)定方法,該方法標(biāo)定速度快,但是精度不夠[4]。
首先總結(jié)了以上方法的優(yōu)缺點(diǎn),針對(duì)傳統(tǒng)6軸工業(yè)機(jī)器人的零位參數(shù)標(biāo)定方法進(jìn)行了深入的研究。其次分析機(jī)器人零位模型,構(gòu)建了零位標(biāo)定模型。再次,依靠快速零位標(biāo)定設(shè)備,擺脫依靠昂貴的激光跟蹤儀過(guò)程復(fù)雜的傳統(tǒng)標(biāo)定方法,為新型零位標(biāo)定方法提供了新思路。最后,通過(guò)對(duì)比實(shí)驗(yàn),快速零位標(biāo)定設(shè)備在標(biāo)定精度上與軸銷的標(biāo)定結(jié)果近似,設(shè)備造價(jià)低廉,可以廣泛向機(jī)器人企業(yè)推廣。
2 機(jī)械模型結(jié)構(gòu)
2.1 快速零位標(biāo)定平臺(tái)
快速零位標(biāo)定平臺(tái)可以在原有機(jī)器人本體上稍微加工,即可快速的進(jìn)行安裝。如圖1所示,為機(jī)器人、測(cè)量塊及快速標(biāo)定測(cè)試臺(tái)組成示意圖。
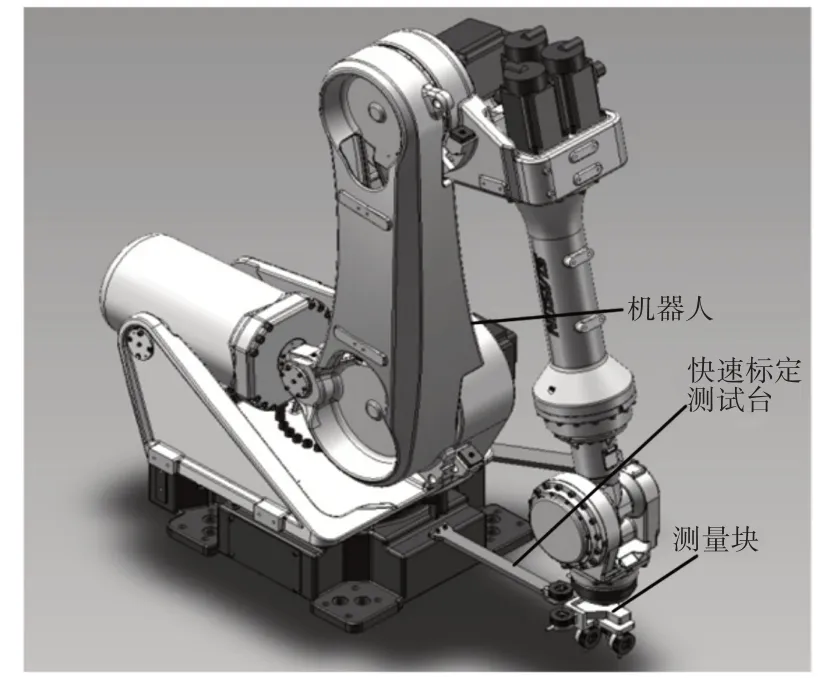
圖1 測(cè)量塊及快速標(biāo)定測(cè)試臺(tái)組成示意圖Fig.1 Schematic Diagram of Robot,Measuring Block and Quick Calibration Test Bench
機(jī)器人:為6軸PUMA結(jié)構(gòu)型號(hào)機(jī)器人,該機(jī)器人擁有6個(gè)自由度,是現(xiàn)在市場(chǎng)應(yīng)用最為廣泛的一款通用型機(jī)器人。因此,本文選擇以該機(jī)器人為研究對(duì)象進(jìn)行深入的研究。
測(cè)量塊:測(cè)量塊安裝在機(jī)器人6軸法蘭上,用于接觸快速標(biāo)定設(shè)備中的千分表。接觸千分表時(shí),要保證千分表與測(cè)量塊充分接觸,以滿足千分表能夠計(jì)算出測(cè)量塊的位置數(shù)據(jù)。
快速標(biāo)定測(cè)試臺(tái):快速標(biāo)定測(cè)試臺(tái)一端安裝有6塊千分表,用于測(cè)量機(jī)器人零位的值。另外一端安裝在機(jī)器人底座,用于固定測(cè)試設(shè)備的固定。
2.2 測(cè)量系統(tǒng)的基本原理
機(jī)械手部夾持一測(cè)量塊,在測(cè)量塊的坐標(biāo)系為O T X T Y T Z T。標(biāo)定塊的坐標(biāo)系為O R X R Y R Z R。矢量R表示機(jī)器人末端執(zhí)行器的位置、O T X T Y T Z T在坐標(biāo)系O R X R Y R Z R的方向余弦表示機(jī)器人手部姿態(tài)。
3 快速標(biāo)定算法
快速標(biāo)定算法為:在對(duì)機(jī)器人本體進(jìn)行快速零位標(biāo)定時(shí),首先需要一個(gè)待標(biāo)準(zhǔn)標(biāo)定的機(jī)器人本體,然后記錄下機(jī)器人各個(gè)關(guān)節(jié)的角度值。
最后對(duì)于待標(biāo)定機(jī)器人持測(cè)試塊到待測(cè)位姿,使用快速零位標(biāo)定算法,使得標(biāo)定塊在O R X R Y R Z R中的表全部接觸,點(diǎn)擊標(biāo)定按鈕,完成對(duì)機(jī)器人本體的標(biāo)定。
3.1 機(jī)器人姿態(tài)計(jì)算
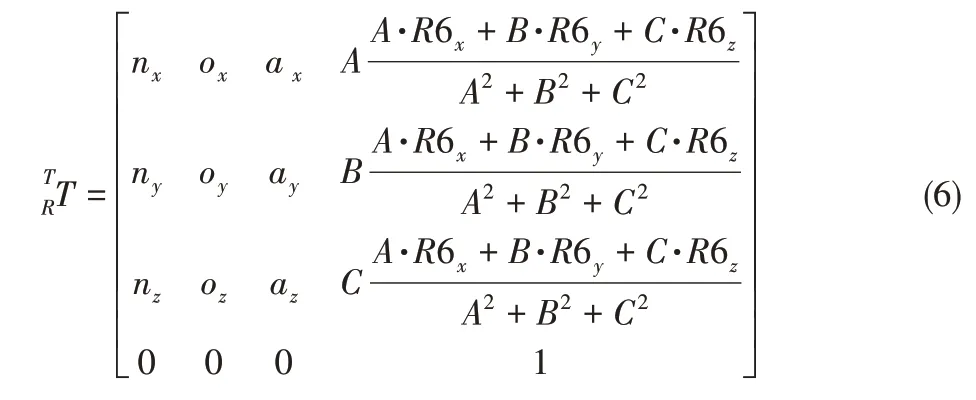
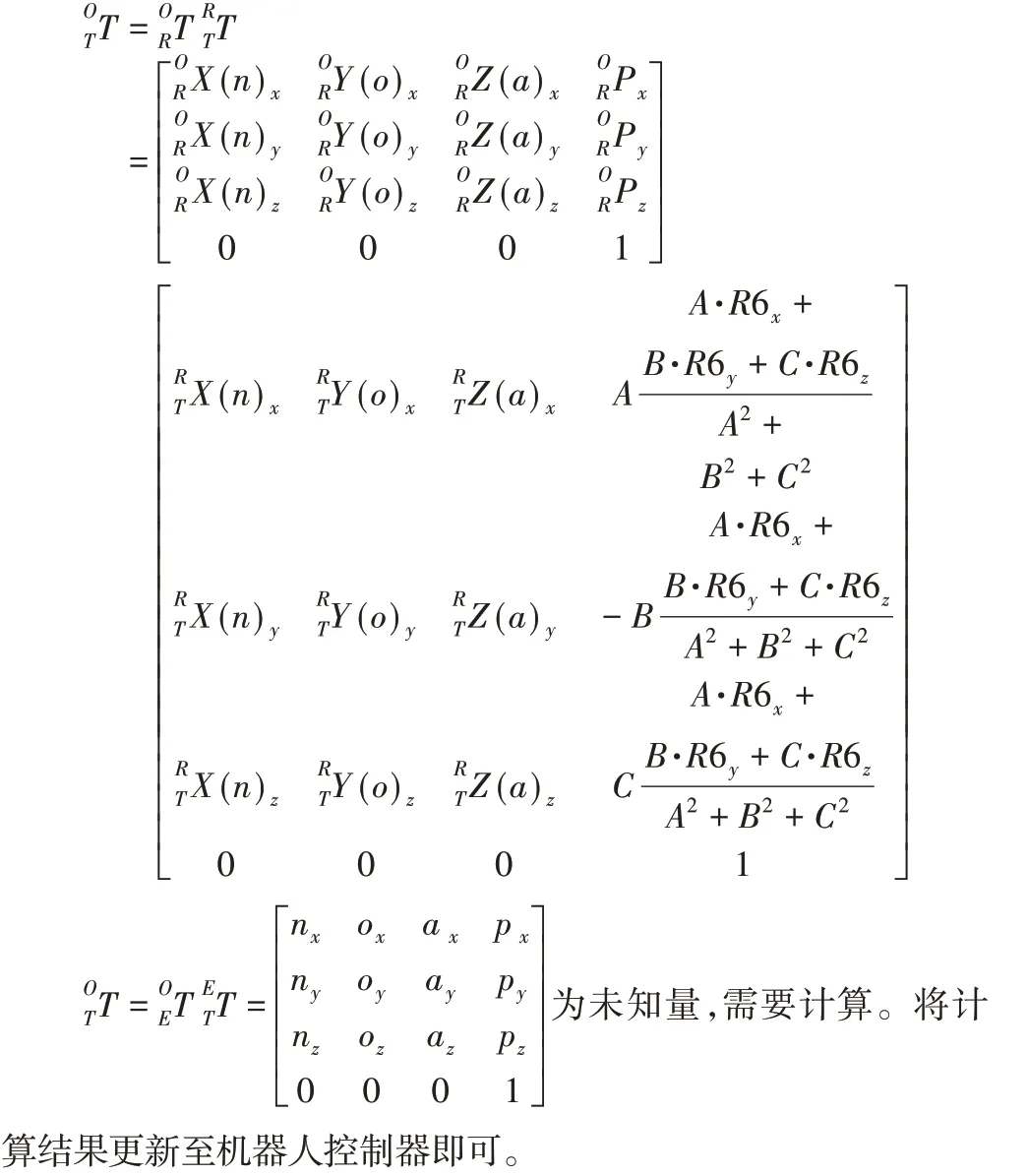
要想獲取機(jī)器人本體的零位參數(shù),必須對(duì)標(biāo)定設(shè)備進(jìn)行建模,如圖2所示,為標(biāo)定設(shè)備的坐標(biāo)系。機(jī)器人標(biāo)定塊的位姿傳遞矩陣為
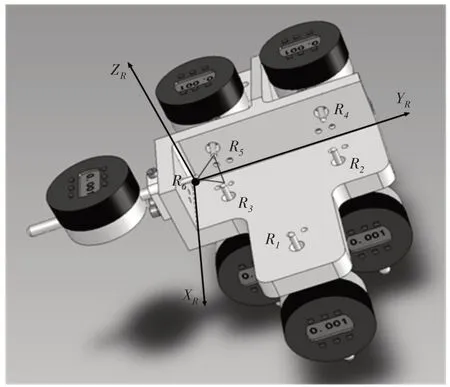
圖2 六塊千分表的標(biāo)定模塊示意圖Fig.2 Schematic Diagram of Calibration Module for Six Dial Gauges
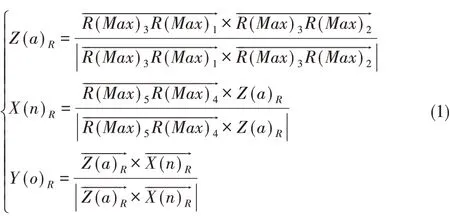
3.1.1 求解標(biāo)定塊
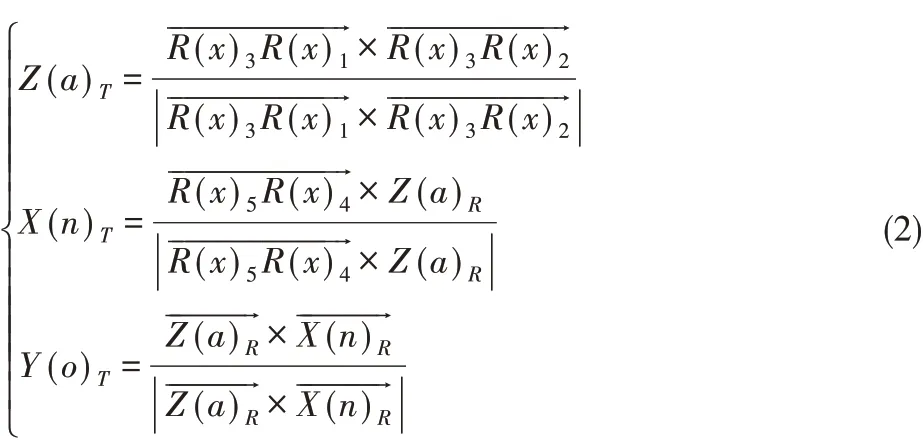
3.1.2 求解測(cè)量塊
3.2 機(jī)器人位置計(jì)算
3.2.1 確定平面交點(diǎn)
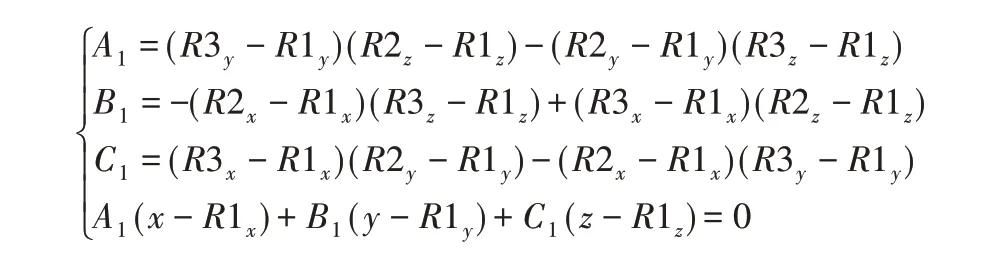
已知一個(gè)平面上的三個(gè)點(diǎn)為(R1x,R1y,R1z)、(R2x,R2y,R2z)、(R3x,R3y,R3z),由三點(diǎn)式可以得到平面方程:
已知標(biāo)定塊的各個(gè)方向的單位向量、R(x)n表示千分表的絕對(duì)讀數(shù),其中n代表第n個(gè)孔,由點(diǎn)法式確定三個(gè)平面方程。
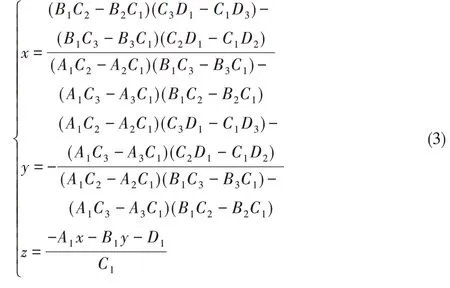
再求三個(gè)相互垂直的平面相交的交點(diǎn),可以求得交點(diǎn)為:
3.2.2 機(jī)器人位置計(jì)算
設(shè)千分表讀數(shù)為零時(shí),R(x)n=L為千分表相對(duì)R(x)n伸出的長(zhǎng)度。已知三個(gè)位置點(diǎn):
式中:j6、l6、j3、k3、k5、l5—機(jī)械提供的參數(shù);R(x)6、R(x)3、R(x)5—千分表的讀數(shù)。由平面三點(diǎn)式方程得到平面方程:
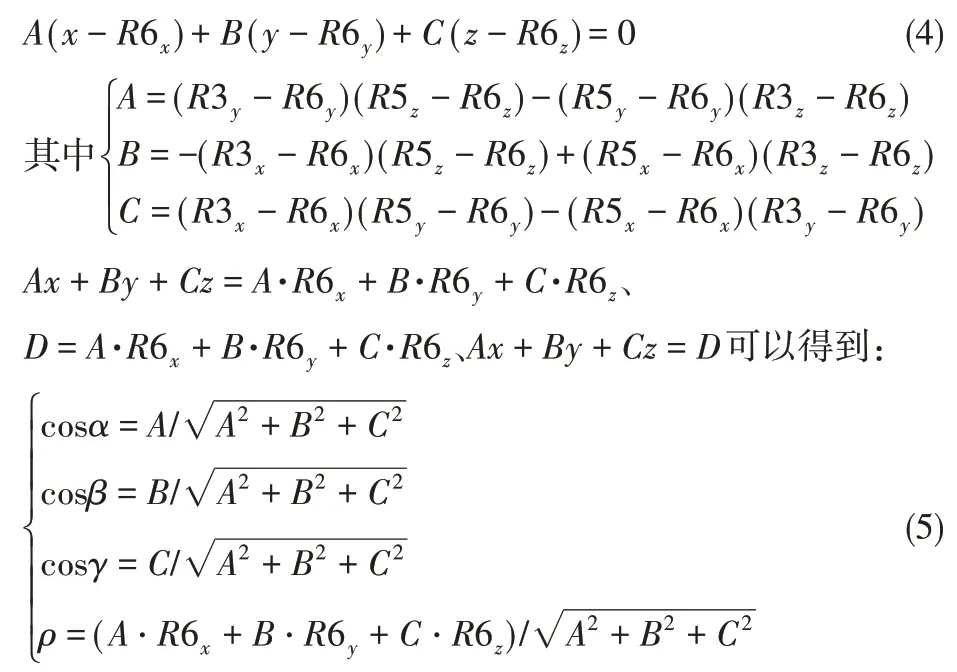
式中:cosα、cosβ、cosγ—平面法矢量的方向余弦,ρ—原點(diǎn)到平面的距離。終上所述已知:
3.3 零位標(biāo)定歸一值
4 零位標(biāo)定結(jié)果及分析
激光跟蹤儀雖然精度較高,但是在標(biāo)定時(shí)間和設(shè)備成本太高,不具備廣泛的推廣性,所以本文不以激光跟蹤儀的數(shù)據(jù)作為比較參考。下面文章分別對(duì)軸銷和快速零位標(biāo)定設(shè)備標(biāo)定出的零位參數(shù)結(jié)果進(jìn)行比較分析,以此來(lái)判斷該方法是否可以在廣泛的向機(jī)器人企業(yè)進(jìn)行推廣。
4.1 銷標(biāo)定實(shí)驗(yàn)
先用軸銷對(duì)機(jī)器人進(jìn)行標(biāo)定,采集機(jī)器人的碼盤值和角度值。與理論的機(jī)器人的碼盤值和角度值進(jìn)行比較。
從表1可以看出,機(jī)械計(jì)算角度數(shù)值和機(jī)器人實(shí)際角度值差距很大。由于其機(jī)器人加工技術(shù)和裝配技術(shù),導(dǎo)致機(jī)器人實(shí)際的零位值與理論值差異較大,誤差較為明顯。
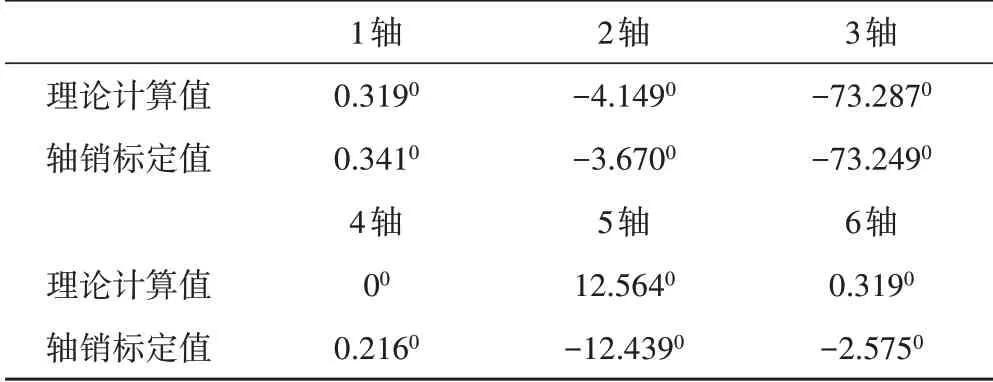
表1 理論計(jì)算值與軸銷標(biāo)定值對(duì)比Tab.1 The Theoretical Calculation Value is Compared with the Calibration Value of the Shaft Pin
4.2 快速標(biāo)定算法實(shí)驗(yàn)
首先,機(jī)器人快速零位標(biāo)定算法采用先調(diào)整姿態(tài)、再調(diào)整位置的計(jì)算方案。由于機(jī)器人的姿態(tài)與標(biāo)定塊的姿態(tài)如果不一致,則機(jī)器人末端執(zhí)行器原點(diǎn)相對(duì)與標(biāo)定塊的位置是不好確定的,所以要采用調(diào)整姿態(tài)后,再調(diào)整機(jī)器人的位置的設(shè)計(jì)思路來(lái)確定機(jī)器人整體的變換矩陣。其次針對(duì)快速零位標(biāo)定方法進(jìn)行分析,再次與軸銷零位參數(shù)進(jìn)行對(duì)比分析。如表2所示,從表中可以看到兩者相差不大,相差最多的關(guān)節(jié)為第三軸。
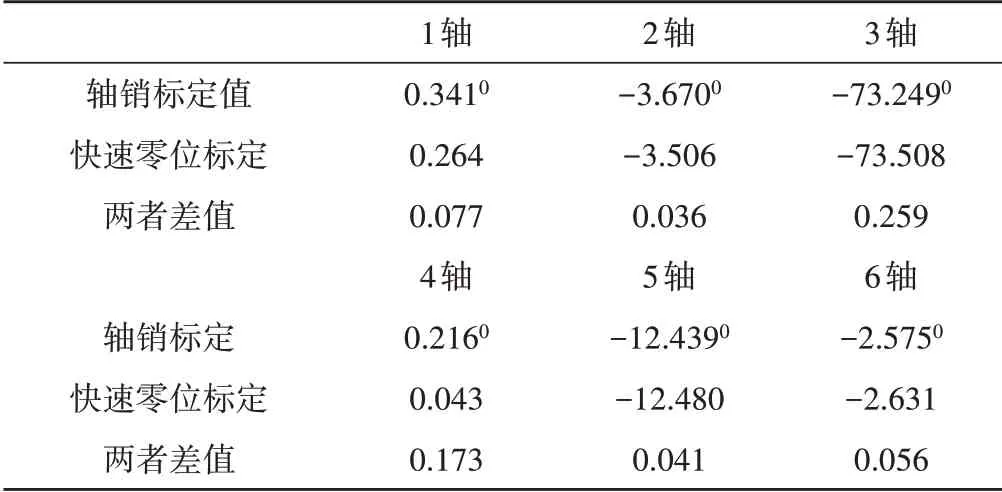
表2 比較零位碼Tab.2 Compare Zero Code
最后,利用Matlab對(duì)標(biāo)定的結(jié)果進(jìn)行分析,為了驗(yàn)證我們的標(biāo)定效果,采用均方差和均方根誤差來(lái)評(píng)估機(jī)器人的標(biāo)定度。相關(guān)數(shù)據(jù)排序,如表3所示。
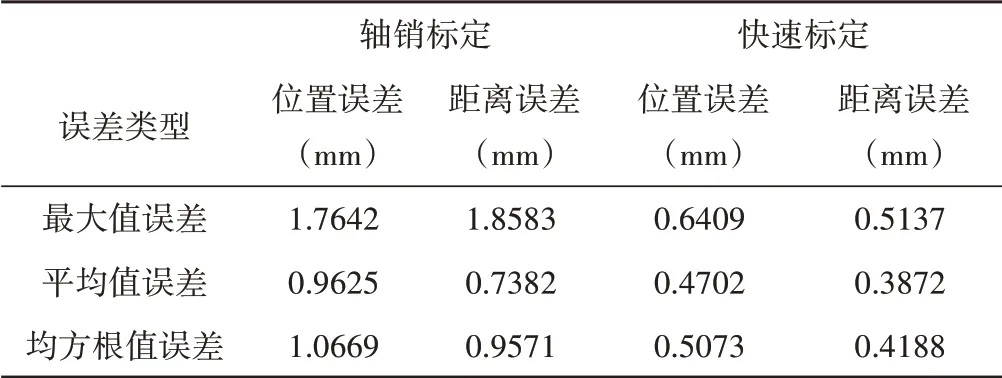
表3 快速零位標(biāo)定值與軸銷標(biāo)定值對(duì)比Tab.3 The Fast Zero Calibration Value Compared with the Calibration Value of the Shaft Pin
4.3 結(jié)論分析和討論
本文提出了一種基于位姿約束的工業(yè)機(jī)器人快速標(biāo)定系統(tǒng),該標(biāo)定系統(tǒng)的收斂性更強(qiáng),精度更高。此外,激光跟蹤儀1天僅能夠?qū)膳_(tái)機(jī)器人零位進(jìn)行標(biāo)定,基于位姿約束的工業(yè)機(jī)器人快速標(biāo)定算法的效率提高到30分鐘一臺(tái)。精度參數(shù)相對(duì)于軸銷平均誤差和均方根誤差分別降低到48.85%和47.55%。相對(duì)比激光跟蹤儀百萬(wàn)級(jí)的成本,該設(shè)備僅需要萬(wàn)元即可完成部署。技術(shù)難點(diǎn)較低,企業(yè)可以很快的掌握。當(dāng)機(jī)器人關(guān)節(jié)增加測(cè)量數(shù)據(jù)需要修改,這是本算法的一個(gè)缺點(diǎn),但是6軸機(jī)器人是最廣泛的一種構(gòu)型,所以后期需要加入4軸和7軸即可滿足需求。
對(duì)基于位姿約束的工業(yè)機(jī)器人快速標(biāo)定算法進(jìn)行以下約束:1)所有關(guān)節(jié)剛接觸千分表時(shí)候,各個(gè)關(guān)節(jié)依靠其理論計(jì)算;2)千分表只能替代軸銷和其他標(biāo)定粗略的標(biāo)定設(shè)備,不能替代激光跟蹤儀這種高精度設(shè)備;3)對(duì)于n自由度(DOF)通用串行機(jī)器人,可識(shí)別參數(shù)的最大數(shù)量是6n+6。
5 結(jié)束語(yǔ)
對(duì)機(jī)器人的零位參數(shù)進(jìn)行準(zhǔn)確的標(biāo)定是機(jī)器人定位精度提升的重要方法,如何能夠快速、方便、經(jīng)濟(jì)獲得機(jī)器人零位模型是本文的核心思想。現(xiàn)有企業(yè)機(jī)器人的零位參數(shù)主要依靠激光跟蹤儀和軸銷進(jìn)行常規(guī)的零位標(biāo)定。鑒于此,本文針對(duì)機(jī)器人零位參數(shù)模型,提出一種基于位姿約束的工業(yè)機(jī)器人快速標(biāo)定算法,闡述了計(jì)算零位的方法和原理。依靠其相應(yīng)的零位模型能夠較為精確的標(biāo)定機(jī)器人的零位參數(shù),分別對(duì)軸銷和快速零位標(biāo)定出的零位結(jié)果進(jìn)行分析與比較。實(shí)驗(yàn)結(jié)果表明,校正后的絕對(duì)精度得到了提高,而且僅僅需要簡(jiǎn)單的配置即可進(jìn)行工作。快速零位標(biāo)定算法不僅以傳統(tǒng)工業(yè)機(jī)器人零位模型為模板,同時(shí)具備軸銷標(biāo)定的標(biāo)定效果,具有更好的誤差模型。下一步將研究基于位姿約束的工業(yè)機(jī)器人快速標(biāo)定算法是否也可以應(yīng)用在7軸機(jī)器人上進(jìn)行研究,以滿足算法的普遍性。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
