改進Zernike矩的運動靶標(biāo)高精度定位算法
2021-08-30 01:46:00朱帥飛
機械設(shè)計與制造 2021年8期
關(guān)鍵詞:檢測
朱帥飛,馬 偉,楊 芳
(1.河南科技大學(xué)機電工程學(xué)院,河南 洛陽 471003;2.河南省機械設(shè)計及傳動系統(tǒng)重點實驗室,河南 洛陽 471003)
1 引言
圖像的邊緣檢測是運動目標(biāo)中心定位中的重要一環(huán),直接影響著運動目標(biāo)中心位置檢測的精度。傳統(tǒng)的邊緣檢測方法包括Sobel、Roberts、Canny、Prewitt、Laplacian等,但是這些方法在硬件設(shè)備一定的情況下,檢測精度只能達到像素級。隨著對檢測精度的要求的提高,傳統(tǒng)的檢測方法早已不能滿足我們的需求,很多學(xué)者把目光轉(zhuǎn)向了亞像素邊緣檢測領(lǐng)域,而且取得較大的進展[1]。
在亞像素邊緣檢測算法中,基于Zernike矩的亞像素邊緣檢測算法由于其獨特的優(yōu)點促使國內(nèi)外學(xué)者對其進行了大量的研究。文獻[2]建立了理想的灰度模型,利用Zernike矩的旋轉(zhuǎn)不變形,通過3個不同階次的Zernike矩來計算定位所需要的4個參數(shù),最終實現(xiàn)了亞像素級別的邊緣定位。文獻[3]為了提高Zernike矩邊緣檢測的速度,在傳統(tǒng)算法的基礎(chǔ)上將傅里葉變換函數(shù)與Zernike矩相結(jié)合提出了一種新的檢測算法,并通過一系列的實驗對檢測速度進行了驗證;但是該算法邊緣檢測的精度不高。文獻[4]通過對三角函數(shù)的分析,結(jié)合三角函數(shù)的對稱性和反對稱性的特點,對原有的Zernike矩進行了改進,在一定程度上提高了算法的檢測精度。文獻[5]針對Zernike矩邊緣檢測的圖像存在的邊緣較粗、精度不高等問題,從邊緣判據(jù)和卷積模板的大小兩個方面出發(fā),對其進行改進,從而達到了提高邊緣檢測精度的目的。文獻[6]將小波能量熵與二維Zernike矩相結(jié)合,來進一步改善圖像邊緣檢測的精度,并且將該算法推廣到工程實踐中實現(xiàn)了對IC芯片表面的定位識別。文獻[7]等對傳統(tǒng)的形態(tài)學(xué)梯度算子進行了改進,利用改進后的梯度算子作為邊緣粗定位,再通過Zernike矩算法對圖像進行重定位,通過這兩種結(jié)合的方式提高了算法的精度和抗噪性。
以運動靶標(biāo)中心定位為研究對象,提出了一種基于改進Zernike矩的亞像素邊緣定位算法。該算法首先采用改進的Can?ny邊緣檢測算法對圖像進行粗定位,再采用提出的改進的Zernike矩算法對圖像進行亞像素級重定位,并且對誤差進行了分析和補償,然后利用最小二乘法擬合確定靶標(biāo)的中心,最終通過坐標(biāo)變換實現(xiàn)了靶標(biāo)位置的空間定位。
2靶標(biāo)標(biāo)記圓像素級邊緣粗提取
2.1改進的Canny邊緣檢測算法
經(jīng)典的的Canny邊緣檢測算法利用高斯濾波降噪,會造成圖像邊緣模糊,影響之后的亞像素定位。自適應(yīng)中值濾波不但可以有效的濾除噪聲,而且可以能夠較好的保留圖像邊緣的完整度和圖像的細(xì)節(jié)[8]。利用自適應(yīng)中值濾波代替經(jīng)典的的Canny邊緣檢測算法中的高斯濾波。自適應(yīng)中值濾波算法主要分為如下兩個步驟:
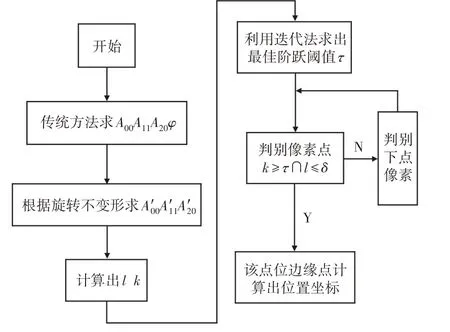
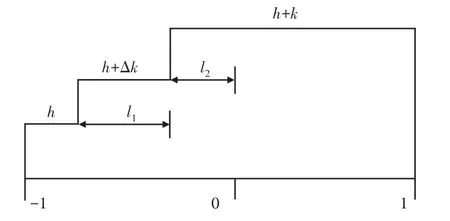
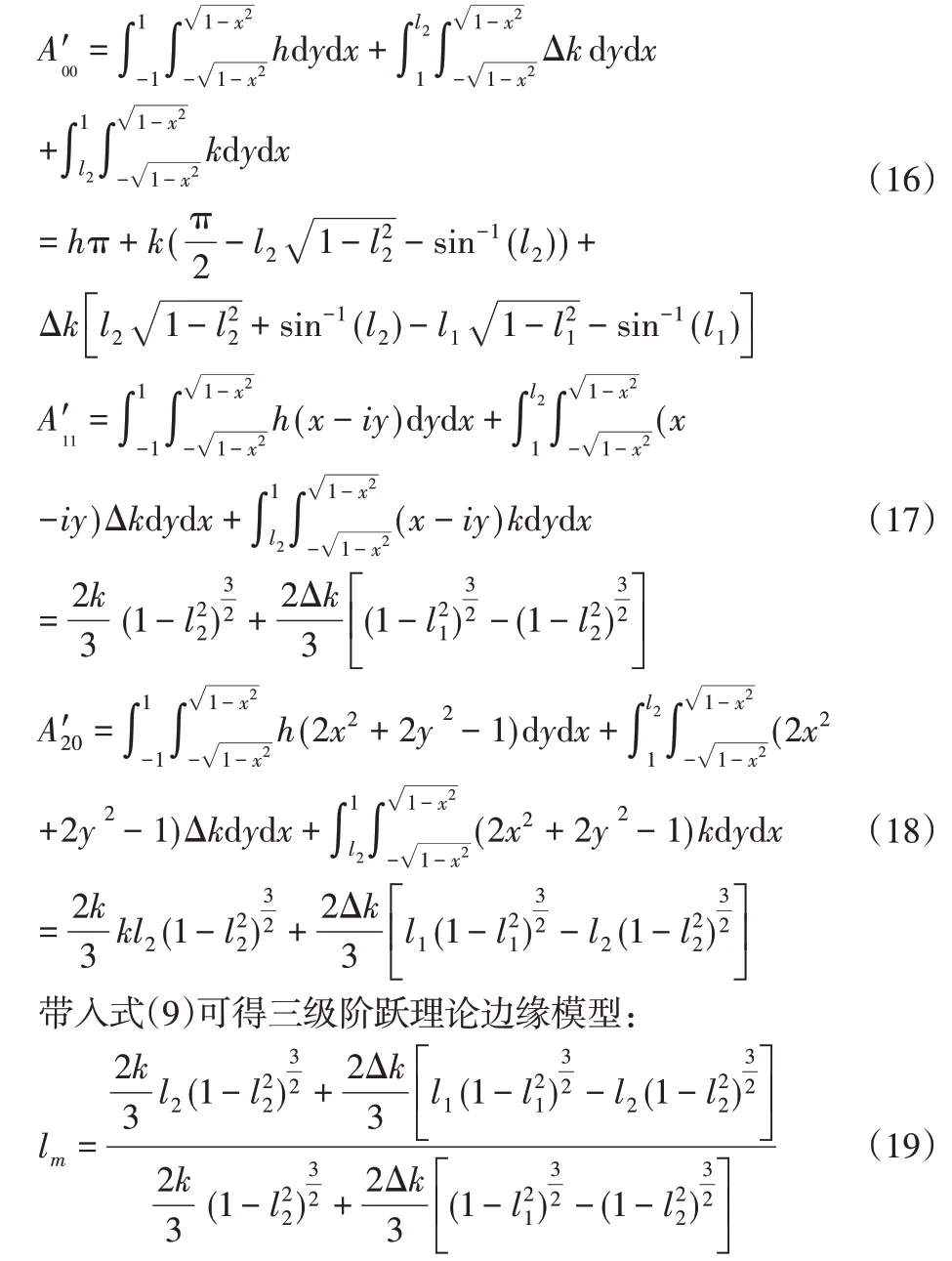
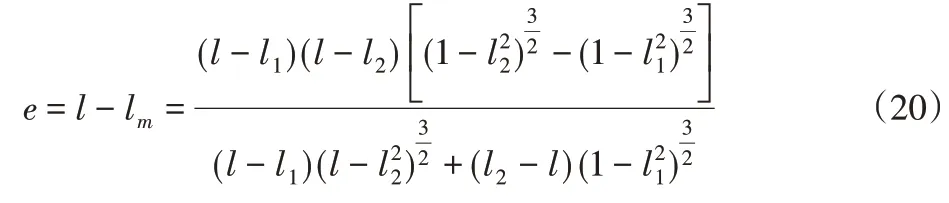
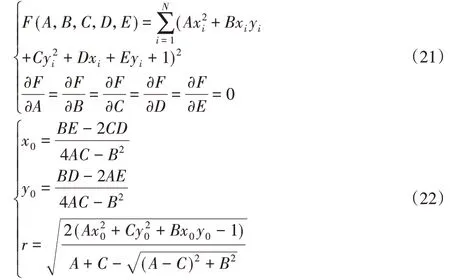
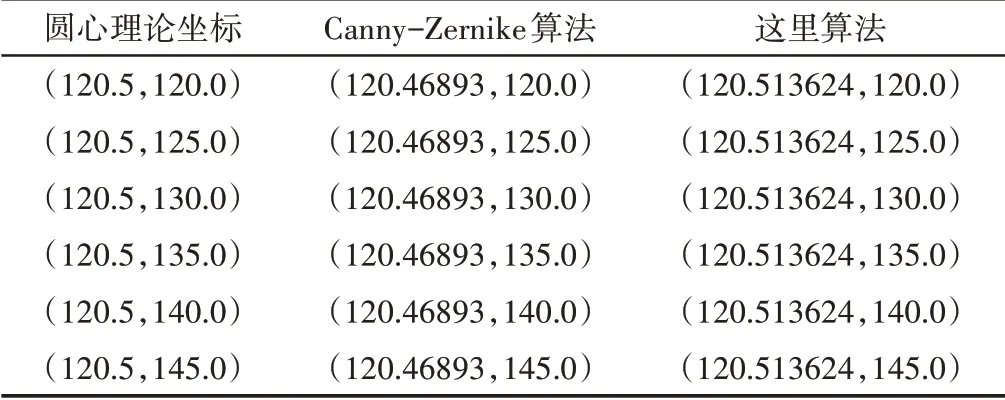
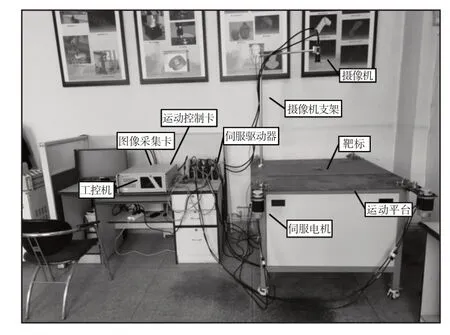
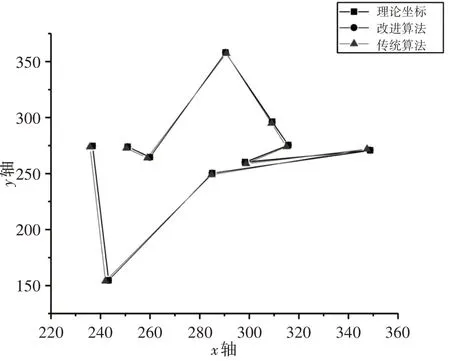
(1)若fmin (2)若fmin 可以看出,算法中噪聲的檢測和認(rèn)定時以fmin和fmin為基準(zhǔn)的,如果fmin 其中,f ij表示點(i,j)的灰度值,s i j為當(dāng)前工作窗口。fmin表示當(dāng)前工作窗口s ij中灰度的最小值;fmax表示當(dāng)前工作窗口s ij中灰度的最大值;f med表示當(dāng)前工作窗口s ij中灰度的中值;smax預(yù)設(shè)允許的最大窗口。 圖像在平移或旋轉(zhuǎn)時,圓形中心定位精度影響較小,算法的穩(wěn)定性較好;而對矩形中心定位精度影響很大,算法的穩(wěn)定性差[9]。因此在運動靶標(biāo)上制作圓形標(biāo)記,標(biāo)記圓的中心點作為特征點。靶標(biāo)標(biāo)記圓像素級邊緣提取步驟如下: (1)對采集到的靶標(biāo)圖像進行預(yù)處理。 (2)將R G B轉(zhuǎn)化為HSV模型,通過顏色特征作為提取的標(biāo)準(zhǔn),提取出感興趣的區(qū)域即靶標(biāo)標(biāo)記圓,最后采用改進的邊緣檢測算法,對提取出的標(biāo)記圓進行像素級邊緣提取。 其中原始圖像和像素級提取后的圖像,如圖1、圖2所示。 圖1原始圖像Fig.1 The Original Image 圖2提取后圖像Fig.2 The Extracted Image 一副圖像中p階q次Zernike矩定義如下: 當(dāng)圖像為離散形式時,其理論公式如下: Zernike正交矩的很重要的一個特性是擁有旋轉(zhuǎn)不變的性質(zhì),根據(jù)這個特性可知當(dāng)轉(zhuǎn)角為φ時,旋轉(zhuǎn)前的正交矩A pq和旋轉(zhuǎn)后的正交矩關(guān)系如下:根據(jù)這個特性,可以推導(dǎo)得到其它所需要的參數(shù),從而實現(xiàn)圖像邊緣的亞像素定位。 傳統(tǒng)的Zenike正交矩在計算時,灰度邊緣模型采用的是理想的二級階躍邊緣模型,如圖3所示。其中參數(shù)k表示階躍高度,參數(shù)h表示背景灰度,l表示圓心與理論邊緣之間的垂直長度,φ表示l與坐標(biāo)軸x軸之間的夾角。 圖3 二級理想灰度模型Fig.3 Two-Level Ideal Gray Model 式中:f′(x,y)—旋轉(zhuǎn)后的邊緣函數(shù)。 由上式進一步可得旋轉(zhuǎn)角度為: 進而推導(dǎo)出模型的多元方程式如下: 由此可以推導(dǎo)出模型中各參數(shù)l,k,h的表達式,如式(9)所示。 最終得到圖像亞像素邊緣點的位置坐標(biāo)如下: 經(jīng)典的Zernike邊緣檢測算法中亞像素邊緣判據(jù)為k≥τ?l≤δ,其中δ為1 2,由上面可以推導(dǎo)得出φ,h,l,k四個參數(shù)。其中閾值τ的選取的自由的,其值影響著亞像素邊緣檢測的效果。若閾值τ選取太小,亞像素邊緣檢測結(jié)果中會出現(xiàn)較多的虛假邊緣;若閾值τ選取太大,則會導(dǎo)致亞像素邊緣檢測時丟失較多的邊緣信息。傳統(tǒng)的閾值τ選取是經(jīng)過人工手動選取的,通過多次反復(fù)調(diào)整閾值τ使亞像素邊緣檢測達到理想的效果,不僅降低了檢測效率而且精測的精度會隨著調(diào)試人員的情緒問題而變得不穩(wěn)定,無法保證其檢測質(zhì)量。 基于迭代法的最佳閾值選取是采用逼近的思想,其原理是先選取一個估計值作為閾值,然后利用此閾值對圖像進行分割,根據(jù)生成的子圖像的特征來選取新的閾值,再采用新的閾值來分割圖像,經(jīng)過一定次數(shù)的循環(huán),使圖像中錯誤分割的像素點達到最少。 圖像中相同像素點的灰度值與階躍灰度值在其像素點及其鄰域內(nèi)的變化趨勢相同,因此可以利用迭代法求最佳閾值的方法求出最佳階躍灰度閾值τ。具體步驟如下: (1)初始值的選取 式中:Zmin、Zmax—圖像中最小階躍灰度值和最大階躍灰度值。 (2)根據(jù)閾值T k將圖像分為兩部分,并分別求出兩部分的平均階躍灰度值。 式中:Z(i,j)—圖像上(i,j)點的階躍灰值;N(i,j)—(i,j)點的權(quán)重系數(shù)。 (3)求解新閾值 (4)如果T k=T k+1,即階躍灰度最佳閾值τ=T k=T k+1迭代結(jié)束,反之k=k+1轉(zhuǎn)向步驟(2)。 改進的Zernike邊緣定位算法檢測流程,如圖4所示。其大致可以分為以下幾個步驟: 圖4 改進算法檢測流程圖Fig.4 Flow Chart of Improved Algorithm Detection (1)采用傳統(tǒng)的Zernike矩檢測算法分別求得三個不同階次的Zernike矩A00,A11,A20,φ; (2)根據(jù)Zernike正交矩旋轉(zhuǎn)不變的性質(zhì),計算得到A′00,A′11,A′20; (3)將階躍灰度值作為研究對象,利用4.1基于迭代法求取階躍灰度最佳閾值τ; (4)根據(jù)亞像素邊緣判據(jù)為k≥τ?l≤δ,對圖像中像素點進行判別。符合條件k≥τ?l≤δ,則該像素點為邊緣像素點,反之不成立。 在選取卷積模板時,由于模板大小的不同會引起誤差。若模板大小為N×N,其覆蓋區(qū)域是模板中心周圍N2個像素,在單位圓內(nèi)取樣時,此時單位圓半徑變成N∕2,則需要把計算出來的垂直距離增大兩倍,補償后的亞像素邊緣檢測坐標(biāo)公式如下: 上述亞像素邊緣檢測位置坐標(biāo)的推導(dǎo)是基于理想的二級階躍邊緣模型,即一個表示背景灰度另一個表示前景灰度。但是圖像中圖形的邊緣是以灰度漸變的形式存在的,實際的邊緣模型更接近三級階躍邊緣模型,即一個表示背景灰度,一個表示目標(biāo)灰度,另一個表示過渡階段灰度,其模型,如圖5所示。 圖5 三級灰度模型示意圖Fig.5 Three-Level Ideal Gray Model 類似于傳統(tǒng)的Zernike矩亞像素邊緣檢測位置坐標(biāo)推導(dǎo)方法,同理可以得到如下的公式: 將傳統(tǒng)的Zernike邊緣檢測算法計算得到的l與三級灰度模型得到的l m做差,可推導(dǎo)偏差e如下: 當(dāng)圖像邊緣位于模板中心的兩側(cè)像素及其鄰域時,則可以利用偏差e對傳統(tǒng)的Zernike邊緣檢測算法計算得到的l進行補償,從而達到提高亞像素邊緣精測的精度的目的。 利用上述改進的Zernike矩算法可以得到靶標(biāo)標(biāo)記圓的一系列亞像素邊緣點,然后通過最小二乘法可以擬合得到標(biāo)記圓的圓心圖像坐標(biāo)位置,隨后采用文獻[10]的方法對攝像機進行進行標(biāo)定,根據(jù)得到的標(biāo)定參數(shù)通過坐標(biāo)變換最終得到靶標(biāo)的空間位置。其中最小二乘法理論公式如下: 式中:p(x i,y i)—離散的亞像素邊緣點;N—離散的數(shù);(x0,y0)—目標(biāo)的坐標(biāo)位置;r—圓半徑。 第一組實驗是計算機仿真實驗,為了對兩種算法的檢測精度進行檢測,制做了一副分辨率為(256×256)的圖像。以一系列點為圓心坐標(biāo),圓半徑為60像素,圖像背景像素值為0,如圖6所示。分別采用傳統(tǒng)的Zernike算法與改進算法對圓心坐標(biāo)進行定位,然后利用最小二乘法擬合得圓心圖像坐標(biāo)位置,如表1所示。通過表1可知傳統(tǒng)算法的定位誤差為0.03107像素;改進算法定位誤差為0.013624像素,表明算法檢測精度優(yōu)于傳統(tǒng)Zernike算法。 圖6 仿真所用圖像Fig.6 The Image for Simulation 表1 仿真結(jié)果Tab.1 Simulation Result 第二組實驗:在省基金的支持下我們搭建了柔索驅(qū)動機構(gòu)實驗平臺。實驗臺主要包括機械結(jié)構(gòu)和電氣控制系統(tǒng),機械結(jié)構(gòu)部分主要由機架、靶標(biāo)的運動平臺、柔索、靶標(biāo)等模塊組成;控制系統(tǒng)主要由用戶操作界面、圖像采集卡、運動控制中心、伺服電機、驅(qū)動器等模塊構(gòu)成,實驗臺,如圖7所示。 圖7 柔索驅(qū)動機構(gòu)實驗平臺Fig.7 Experimental Platform for Cable Driving Mechanism 其中采集裝置為德國巴斯勒acA2000-340kc型號的工業(yè)相機,分別率為2046*1086,編程平臺為vs2013,編程語為c++結(jié)合OpenCV2.4.10。在驅(qū)動靶標(biāo)運動的過程中,首先分別采用傳統(tǒng)的Zernike算法與這里改進算法分別對運動靶標(biāo)中心進行亞像素邊緣提取,然后采用最小二乘法對提取的亞像素邊緣進行擬合,最終通過坐標(biāo)變換得到靶標(biāo)中心空間坐標(biāo)。通過進行對比分析,來驗證改進算法的檢測精度。在靶標(biāo)運動過程中抽取十個數(shù)據(jù)點,將計算坐標(biāo)與理論坐標(biāo)進行了對比分析,實驗結(jié)果,如表2所示。 表2 實驗結(jié)果Tab.2 SimulationResult 三條曲線比較接近,不容易直觀地對其進行區(qū)分、評價,如圖8所示。為了對兩種算法的檢測精度進行定量的分析,將這些實驗數(shù)據(jù)進行了整理分析,整理后的數(shù)據(jù),如表2所示。通過表2可知傳統(tǒng)Zernike算法的x方向最大誤差為1.269mm,平均誤差為0.787mm,y方向最大誤差為1.451mm,平均誤差為1.065mm;改進算法x方向最大誤差為0.744mm,平均誤差為0.475mm,y方向最大誤差為0.819mm,平均誤差為0.65mm。顯然,改進算法的檢測精度要優(yōu)于傳統(tǒng)的Zernike算法;同時最佳閾值的自動選取相比于相比于人工手動調(diào)試具有更高的效率,為后期柔索機構(gòu)伺服反饋、高精度的控制提供了有效依據(jù)。 圖8 算法對比曲線Fig.8 Algorithmic Contrast Curve 經(jīng)典的Zernike矩算法邊緣檢測判據(jù)中因為自由閾值的存在,降低了檢測效率,且傳統(tǒng)的檢測方法對誤差的來源未進行分析,也未考慮誤差補償,造成檢測精度的下降。針對這兩個檢測的難題,提出一種基于改進Zernike矩的亞像素邊緣定位算法。以運動靶標(biāo)中心定位為實驗研究對象,測試結(jié)果表明:該方法能夠準(zhǔn)確對運動靶標(biāo)中心進行定位,檢測精度要優(yōu)于傳統(tǒng)的Zernike算法,同時最佳閾值的自動選取相比于人工手動調(diào)試具有更高的效率。2.2像素級邊緣粗提取


3傳統(tǒng)的Zernike邊緣定位算法
3.1圖像中Zernike矩定義



3.2 Zernike亞像素邊緣定位原理





4 改進的Zernike邊緣定位算法
4.1 基于迭代法的階躍灰度最佳閾值選取


4.2 改進的Zernike邊緣定位算法檢測流程
5 誤差分析及補償
5.1 卷積模板引起的誤差

5.2 邊緣模型選取引起的誤差
6 最小二乘法擬合靶標(biāo)圓心坐標(biāo)
7 實驗結(jié)果及分析

8 結(jié)論
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48
