虛擬電流注入法在線補償轉子位置估算誤差
2021-08-24 03:17:38喬鳴忠高鍵鑫盧希浩
國防科技大學學報 2021年4期
彭 威,喬鳴忠,蔣 超,高鍵鑫,盧希浩
(海軍工程大學 電氣工程學院, 湖北 武漢 430033)
永磁同步電機的高精度控制需要電機實時轉子位置,通常采用旋轉變壓器等位置傳感器進行檢測[1],但對于艦船使用的機槳一體化裝置,位置傳感器的安裝和維護困難。無位置傳感器控制成為解決這一問題的一種技術手段。
零速和低速時電機反電動勢低,采用基于反電動勢的觀測器方法[2]難以準確估算轉子位置,所以通常采用高頻注入法。高頻注入法通常又分為旋轉高頻注入法[3-4]和脈振高頻注入法[5]。旋轉高頻注入法需要電機有一定的凸極率,而脈振高頻注入法可適用于凸極率很小甚至表貼式電機。但旋轉高頻注入法易于實現[6],使其成為研究的熱點。
旋轉高頻注入法關鍵技術在于通過解調高頻響應電流獲取轉子位置。簡化電機高頻響應模型,以及解調過程中使用濾波器都可能導致估算的轉子位置與真實值出現偏差。通過理論推導可以計算出忽略定子電阻導致的轉子估算誤差量[7-8]來進行定量補償,但電機運行過程中電感會隨磁路飽和程度變化而變化[9],李峰等提出了一種分步動態電感辨識方法并給出了相應的轉子位置誤差補償方案[10]。邵俊波推導了忽略交叉耦合導致的誤差,采用線性擬合誤差的方法來進行補償[11]。
隨著電機轉速的上升,濾波器導致的誤差會更加明顯,成為電機低速運行時估算位置誤差的主要來源。廖軍等利用多個同步軸系變換結合高通濾波器取代帶通濾波器和帶阻濾波器[12]。Kim等[13]用全通濾波器代替帶通濾波器和低通濾波器減小相位延時帶來的誤差。劉景林等通過對高頻電流正、負序分量的相角差利用最小二乘估計,得到了較高精度的轉子位置[14]。在電機處于零速時,利用正序電流的偏差量來補償轉子初始位置估算誤差[15-16]。文獻[17]研究了注入旋轉電壓的頻率、幅值等對于電機無位置傳感器矢量控制性能的影響。在轉子位置解調環節,利用擴展狀態觀測器取代比例積分(Proportional Integral, PI)觀測器也能改善轉子位置估算效果[18]。黃守道等用兩個相同的一階低通濾波器串聯來實時獲取由于采用一階低通濾波器帶來的相移[19]。文獻[20-21]指出,通過在脈振高頻脈振注入法中構造虛擬坐標系取代帶通濾波器和PI調節器,可減小轉子位置估算誤差和提高系統魯棒性。
本文提出一種虛擬電流注入法補償旋轉高頻注入法因低通和帶通濾波器導致的誤差。基于估算的轉速,構造與負序電流頻率相同的虛擬電流,該電流采用與負序電流完全相同的解調環節。利用虛擬電流解調出的位置與構造的位置的差值補償估算的轉子位置。由于濾波器對電流相位的影響僅與電流頻率有關,當估算的轉速為電機真實轉速時,虛擬電流注入補償法將能消除濾波器導致的誤差。
1 虛擬電流注入法在線補償誤差的機理
1.1 旋轉高頻注入法轉子位置信息解調
旋轉高頻注入法是在αβ坐標系下給電機注入一個頻率遠高于電機基波頻率但低于開關頻率的旋轉電壓。
(1)
式中,uαh、uβh分別為注定電壓在α軸和β軸上的分量,ωh、uh分別為注入高頻電壓的角頻率和幅值。
將電機簡化成純電感模型,得到αβ坐標系下的高頻響應模型。
(2)
式中:L0=(Ld+Lq)/2,L1=(Ld-Lq)/2,Ld、Lq分別為直軸和交軸電感;iαh、iβh分別為α軸和β軸上的高頻響應電流分量;p為微分算子;電機轉子位置θe=ωet+θ0,θ0為電機初始位置,ωe為電機基波電角速度。
結合式(1)、式(2),高頻響應電流可表示為:
(3)
式中,Iph、Inh分別為高頻響應電流正、負序分量的幅值。
(4)
可以看出高頻響應電流負序分量中含有轉子位置信息,對負序分量進行解調來得到轉子位置信息。解調過程如圖1所示。
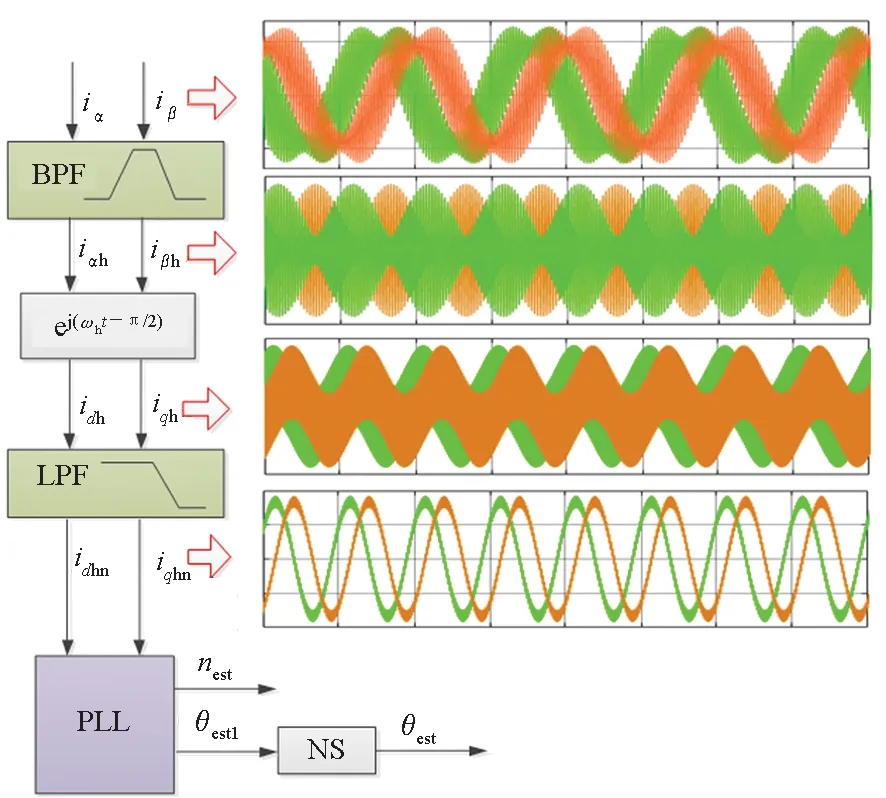
圖1 高頻響應信號解調原理圖Fig.1 Demodulation diagram of high frequency response signal
若忽略濾波器對于電流相位的影響,帶通濾波器(Band Pass Filter,BPF)濾掉電機基波頻率的低頻分量和開關頻率的高頻分量,只留下注入法產生的高頻響應電流iαh、iβh,經過角速度為-ωh的同步軸系濾波,得到電流idh、iqh:
(5)
此時的正序分量為高頻交流量,負序分量為角速度為2ωe的低頻交流量。若通過低通濾波器(Low Pass Filter,LPF)能完全濾除正序高頻分量,剩下負序低頻分量idhn、iqhn。
(6)
idhn、iqhn通過鎖相環和轉子磁極判斷[13-15]可以得到估算的轉速nest和轉子位置θest。關于磁極判斷的方法已有較多研究,這里不做重點論述。
1.2 虛擬電流注入法在線補償轉子位置誤差
在高頻響應信號解調過程中,用到帶通濾波器和低通濾波器會產生轉子位置估算誤差,提出虛擬電流注入法來同時補償兩種濾波器帶來的誤差,如圖2所示。
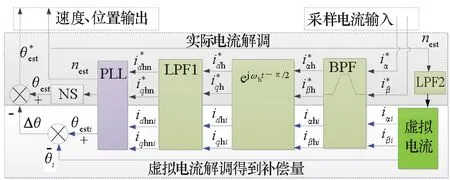
圖2 虛擬電流注入法信號解調原理圖Fig.2 Demodulation diagram of virtual current injection method
虛擬注入電流是基于估算的電機速度nest,利用數字信號處理器(Data Signal Processor, DSP)等處理器構造一組高頻虛擬電流信號:
(7)
ωest是電機估算轉速nest所對應的電角速度。iαi、iβi只參與解調過程,不會對空間矢量調制或電機的實際運行帶來影響。先估算轉速和轉子位置再進行補償,時間軸ti的起始點為補償開始實施的時刻,與t不同。實際電流和虛擬電流采用相同采樣頻率。高頻響應電流的正序分量角頻率ωh,負序分量的角頻率為-(ωh-2ωe),虛擬電流角頻率為-(ωh-2ωest)。實際采樣電流和虛擬電流通過相同的高通、同步軸系和低通濾波器以及鎖相環解調。
不考慮簡化電機模型等帶來的影響,帶通濾波器對于ωh、(ωh-2ωe)、(ωh-2ωest)三個頻率點處的幅值衰減為K0倍和K1、K2倍,相位滯后分別為ψ0和ψ1、ψ2,高頻響應電流和虛擬注入電流經過帶通濾波器后變為:
(8)
(9)
通過同步軸系濾波器后電流變為:
(10)
(11)
若經過低通濾波器后,正序電流分量幅值衰減為零,負序電流與虛擬注入電流幅值衰減和相位延時分別為K3、K4,ψ3、ψ4,濾波后得到的低頻交流量為:
(12)
(13)
通過鎖相環可以得到估算的電機轉子位置θest和虛擬注入信號包含的位置θesti分別為:
(14)
(15)
而構造的虛擬注入電流信號中ωestti為已知量,故可得到對虛擬電流解調環節導致的位置誤差為:
(16)
用Δθi對估算的電機轉子位置進行補償,補償后的轉子位置為:
(17)
若估算的電機轉速為實際的電機轉速,則高頻響應負序電流角頻率-(ωh-2ωe)與-(ωh-2ωest)相等,而相同濾波器對頻率相同的電流相位影響相同,此時ψ1=ψ2、ψ3=ψ4,采用虛擬注入法可以完全消除使用濾波器導致的誤差。
2 影響虛擬注入法誤差補償效果的因素分析
虛擬注入信號與負序響應電流頻率相同,即估算轉速與真實轉速相同時,理論上虛擬注入法能完全消除濾波器導致的位置誤差。但注入高頻電壓會使電機轉速出現波動,而受正序電流的影響,估算的轉速也出現波動,最終導致虛擬注入信號頻率與負序電流頻率不同。故有必要對上述因素對補償效果的影響進行分析,采取合理措施保證虛擬注入法的補償效果。
2.1 高頻響應電流引起電機轉速波動
電機穩態下,基波電流產生的電磁轉矩使電機達到轉矩平衡,而高頻響應的脈動轉矩會導致電機轉矩波動。將式(3)變換到基波旋轉坐標系下,得到dq軸電流為:
(18)
結合式(4),可將高頻響應電流產生的電磁脈動轉矩簡寫為:
(19)
式中,pn為電機極對數,ψf為轉子磁鏈。結合式(4)可知,脈動轉矩作用于電機轉動慣量J產生機械角加速度。
(20)
而脈動轉矩頻率為(ωh-ωe),在一個脈動周期內對機械角加速度積分,易求出電機機械角速度變化量為:
(21)
由式(21)可知,提高注入電壓頻率可降低轉矩脈動導致的轉速波動量,而電機轉速上升會導致轉速波動量上升。但提高注入頻率,高頻響應電流變小,會需要更高的電流采樣頻率和電流采樣精度,加大電流檢測的難度。
借助仿真進一步探討高頻響應電流引起的轉速波動大小,矢量控制下當注入頻率取500 Hz,4對極電機運行在50 r/min和150 r/min時的實際轉速波動如圖3所示。

圖3 高頻響應電流引起電機轉速波動Fig.3 Motor speed fluctuation caused by high-frequency response current
轉速為150.0 r/min時的波動頻率比50.0 r/min時小,轉速波動要大于50.0 r/min,但都在0.8 r/min以內,對應的負序電流頻率波動在0.1 Hz以內。
2.2 高頻正序響應電流引起估算轉速波動
負序響應電流與正序響應電流之比為(Lq-Ld) ∶(Ld+Lq),負序電流在凸極率不高時會明顯比正序電流小。通過同步坐標軸系變換后正序電流變為兩倍注入頻率的交流量,而原來負序電流變為兩倍基波頻率的交流量。低通濾波器LPF1首先要具有一定帶寬能保證不同轉速下負序電流幅值不衰減以被鎖相環解調,其次還要能充分濾除正序電流,否則會導致估算轉子位置出現波動。
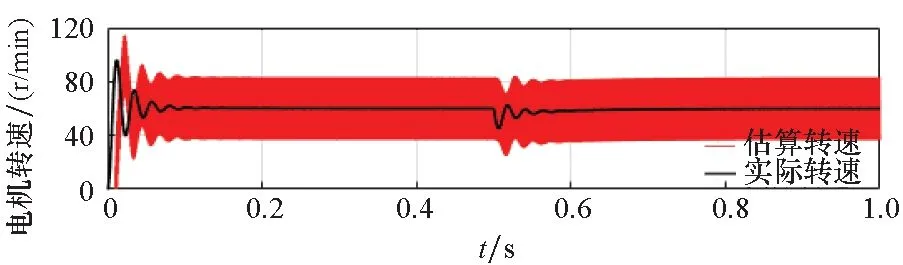
若采用截止頻率為450 Hz、550 Hz的二階巴特沃斯帶通濾波器和截止頻率為60 Hz的二階巴特沃斯低通濾波器,當注入頻率取500 Hz,4對極電機運行在120 r/min時的估算電機轉速和實際電機轉速波動量如圖4所示。估算轉速以兩倍注入頻率波動,估算的轉速波動量遠大于轉矩脈動導致的電機實際轉速波動量,引起的虛擬注入信號頻率的波動接近7 Hz。
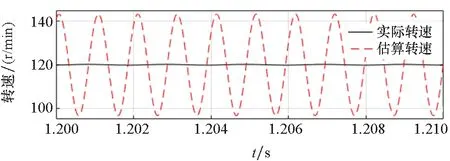
圖4 估算轉速與實際轉速波動量Fig.4 Fluctuations of the estimated speed and actual speed
2.3 提高虛擬注入法誤差補償效果的措施
通過上述分析比較可知,未能完全濾除正序電流導致的估算轉速波動是影響虛擬注入法補償效果的主要因素,而高頻轉矩脈動導致的影響較小,減小轉矩脈動會導致電流檢測和采樣難度增加,故主要從消除虛擬注入電流頻率波動來改善補償效果。
正序電流和負序電流都為交流量,要想保證低通濾波器對負序電流的帶寬的同時完全濾除正序電流,會導致濾波器設計過于煩瑣,不便于DSP實現。
采用一個低通濾波器(圖2中的LPF2)對波動轉速信號進行濾波,得到穩定的轉速用于構造虛擬電流信號。LPF2作用對象為直流量,不需要考慮帶寬,通過LPF2完全濾除估算轉速信號的波動量更容易實現。
采樣頻率為10 kHz,LPF2設計為一階巴特沃斯濾波器,截止頻率為10 Hz。通過FDATool可知,LPF2對于(ωh-ωe)的估算轉速高頻波動量的幅值增益約為-60 dB,能消除用于誤差補償的估算轉速的高頻波動量。
電機工況改變到再次進入穩定的過程中,電機轉速都會出現瞬時的變化后穩定在指令值。通過階躍信號來替代這種瞬時的轉速變化來進行分析。階躍信號通過LPF2后幅值經過約0.05 s上升到1,而電機實際的轉速變化斜率不可能達到階躍響應的斜率,這意味著在實際工程電機轉速變化時,LPF2對于電機轉速變化的延時將在0.05 s以內。在這0.05 s內,虛擬注入法補償的精準度會受到影響。但由于LPF2僅用在估算轉子位置誤差補償,LPF2對于轉速變化的延遲不會影響基本的轉子位置解調和電機運行。
3 仿真研究和實驗驗證
為了驗證所提出的轉子位置估算誤差補償法的正確性和效果,搭建了一套永磁同步電機的矢量控制仿真模型,電機和變頻器部分參數如表1所示。
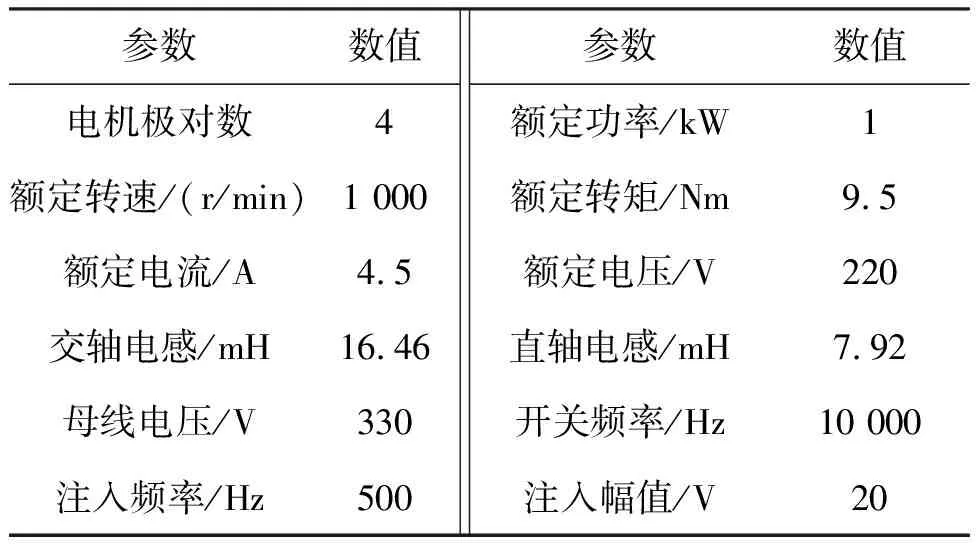
表1 三相永磁同步電機控制平臺參數
綜合考慮濾波器對正序電流的幅值的衰減效果和電機運行區間以便于處理器快速運算。實際電流解調采用截止頻率為450 Hz和500 Hz的二階帶通濾波器BPF,和截止頻率為60 Hz的低通濾波器LPF1。
利用MATLAB里的FDATool工具可以分析出電機處于不同轉速時濾波器導致的電流相位延遲和估算的轉子位置誤差,如表2所示。
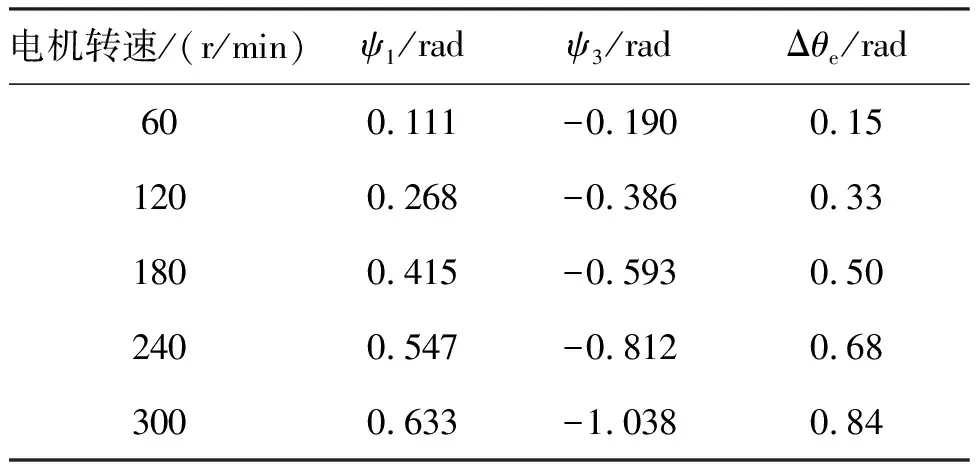
表2 電機不同轉速下濾波器導致的轉子位置估算誤差Tab.2 Rotor position estimation error caused by filters at different speeds
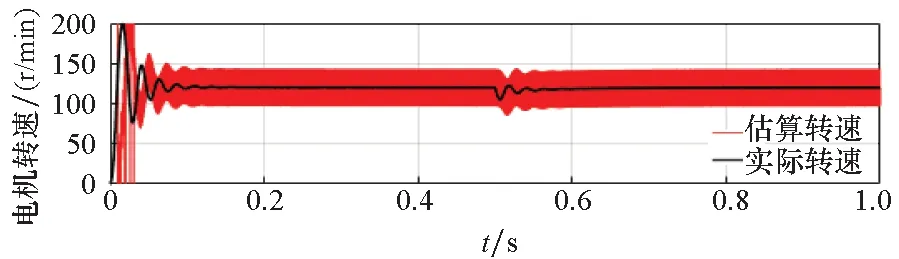
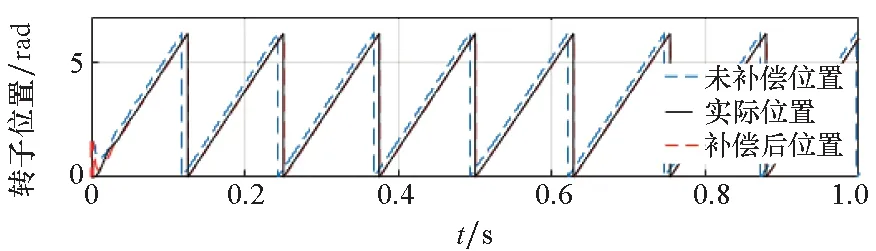
當電機空載運行在60 r/min和120 r/min時,在0.5 s處突加負載仿真波形如圖5、圖6所示。從圖5、圖6可以看出,突加轉矩負載,電機轉速波動后能迅速穩定,高頻電流解調用到的濾波器會使估算的轉速變化滯后于實際轉速變化。采用虛擬注入法補償估算的轉子位置后誤差得到了明顯減小,補償后估算的轉子位置曲線與實際轉子位置曲線基本重合。
(a) 電機實際轉速和估算轉速(a) Actual speed and estimated speed of motor
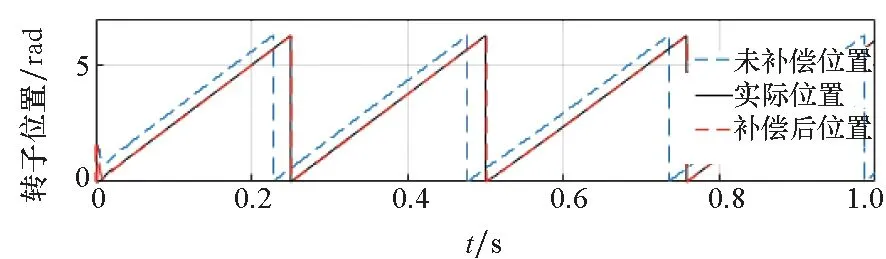
(b) 轉子位置(b) Rotor position
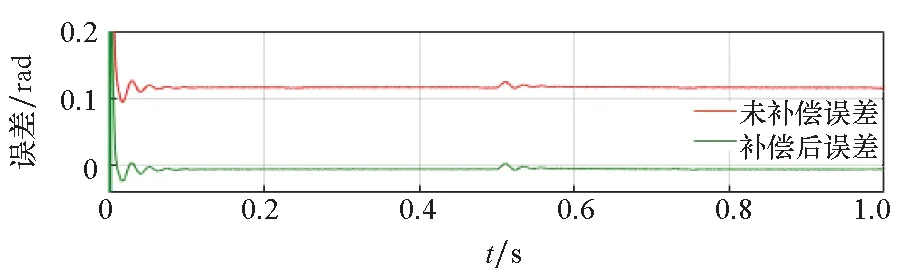
(c) 轉子位置誤差(c) Rotor position error圖5 60 r/min轉速突加負載仿真波形Fig.5 Simulation waveforms at 60 r/min with sudden load
(a) 電機實際轉速和估算轉速(a) Actual speed and estimated speed of motor
(b) 轉子位置(b) Rotor position
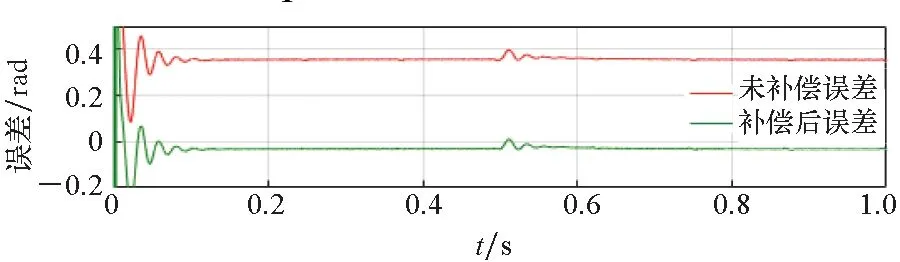
(c) 轉子位置誤差(c) Rotor position error圖6 120 r/min轉速突加負載仿真波形Fig.6 Simulation waveforms at 120 r/min with sudden load
由于虛擬注入用到的是經過低通濾波器LPF2后的估算轉速,為定值,故突加負載不會導致虛擬注入電流頻率波動,整個過程補償量基本為定值。
對電機運行在180 r/min、240 r/min、300 r/min時采用虛擬電流注入法的補償效果進行仿真,對誤差補償量大小、補償后誤差大小以及表2中分析的濾波器理論誤差大小進行比較,如圖7所示。
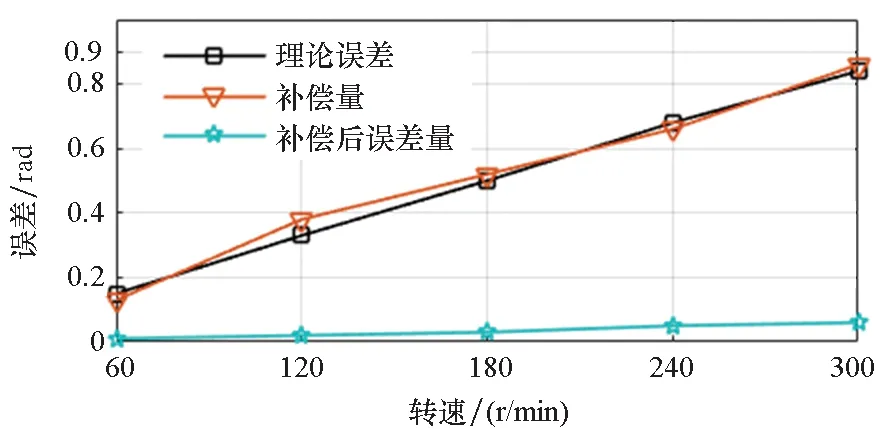
圖7 不同轉速下的補償效果Fig.7 Compensation effect at different speeds
從圖7可以看出,在不同轉速下虛擬注入法得到的補償量與理論誤差吻合,且補償后轉子位置誤差明顯減小,說明該補償方法能基本消除由濾波器導致的轉子位置誤差。
搭建如圖8所示的實驗平臺,進一步驗證虛擬電流注入法對估算轉子位置誤差的補償效果。

圖8 實驗平臺Fig.8 Experiment platform
兩臺永磁同步電機參數相同,永磁同步電機參數和變頻器參數與表1相同。DSP28335內部變量信息通過串口發送給電腦顯示,實際轉子位置和估算的轉子位置等信息通過數模轉換成電壓信號,利用示波器采集。
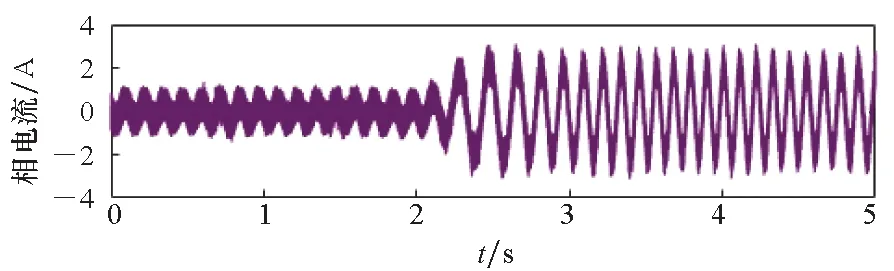
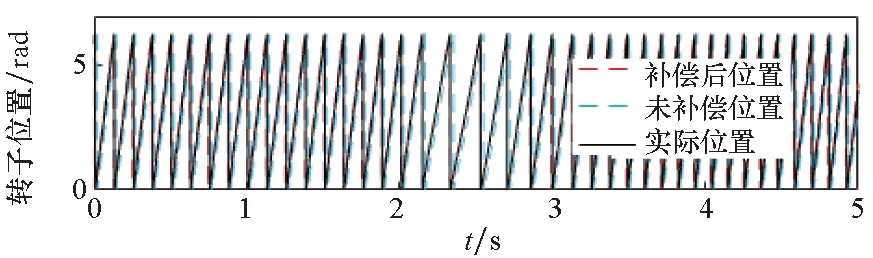
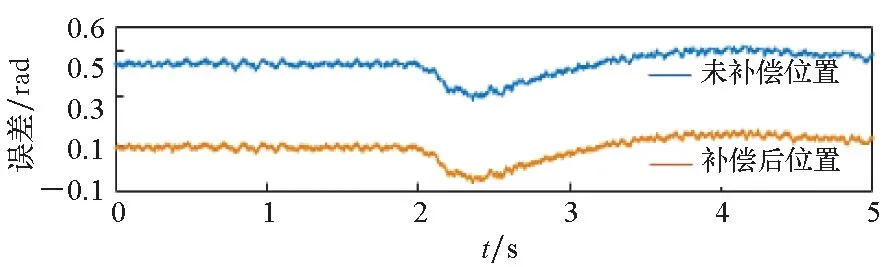
轉速為60 r/min和120 r/min時突加負載的實驗波形如圖9、圖10所示。從圖9和圖10可以看出,電機在加負載前后轉速穩定時,通過虛擬注入法能有效減小位置估算誤差。在加負載后電機轉速變化的過程中,濾波器LPF2對電機瞬間的速度變化有延遲,在延遲時間內補償精度會受到影響,但LPF2的使用能增加電機穩態時轉子位置誤差補償的精度。兩種工況下電機處于穩態運行時,補償后的估算轉子位置誤差相比未補償時均能減小77%以上。
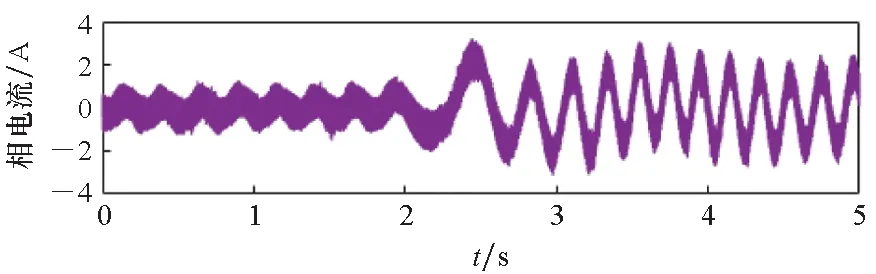
(a) 電機A相電流(a) A-phase current of motor
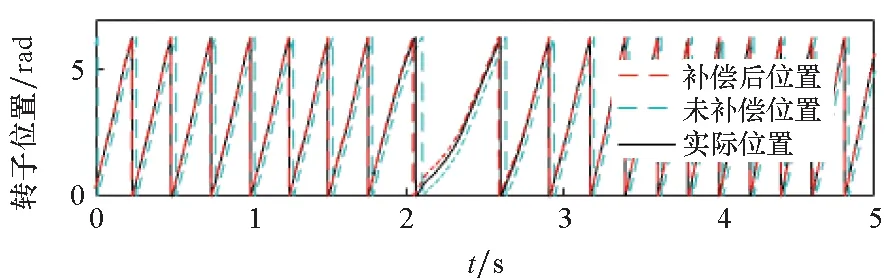
(b) 轉子位置(b) Rotor position
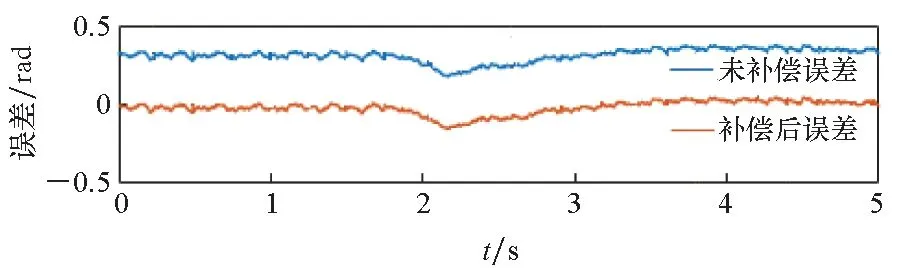
(c) 轉子位置誤差(c) Rotor position error圖9 60 r/min轉速突加負載實驗波形Fig.9 Experimental waveforms at 60 r/min with sudden load
(a) 電機A相電流(a) A-phase current of motor
(b) 轉子位置(b) Rotor position
(c) 轉子位置誤差(c) Rotor position error圖10 120 r/min轉速突加負載實驗波形Fig.10 Experimental waveforms at 120 r/min with sudden load
仿真用到的電機模型沒有考慮電機交叉飽和的影響,而實驗在帶載時尚未對交叉飽和帶來的誤差進行補償,所以采用虛擬注入法補償后實驗轉子位置誤差稍大于仿真時的誤差。
電機空載狀態下轉速由60 r/min突增到120 r/min時的相關波形如圖11所示。在轉速增加的過程中,所提補償方法也起到了明顯效果,穩態平均誤差在0.1 rad以內,轉速變化時的補償效果比穩定時略差。
但電機大多時候處于穩態,使用LPF2能避免補償受正序響應電流的干擾,總體上提高電機控制的精度和效率。
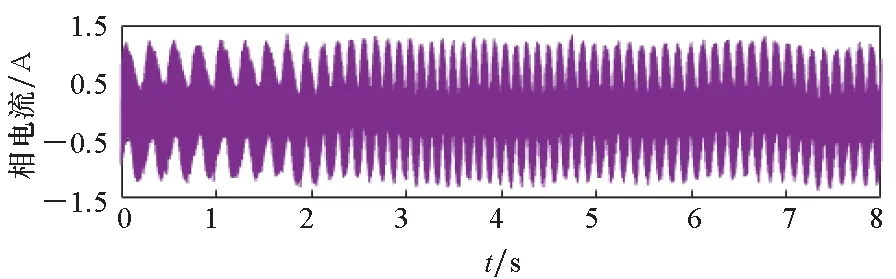
(a) 電機A相電流(a) A-phase current of moto
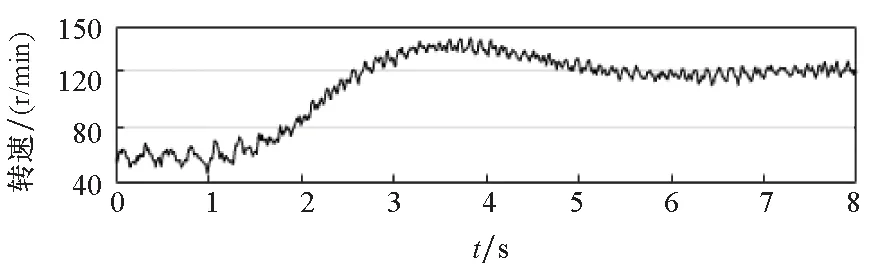
(b) 電機實際轉速(b) Actual motor speed
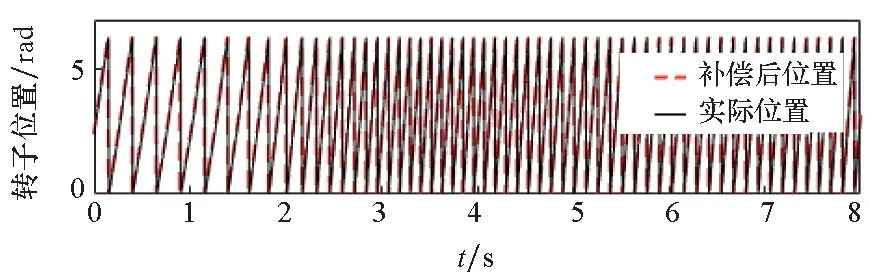
(c) 轉子位置(c) Rotor position
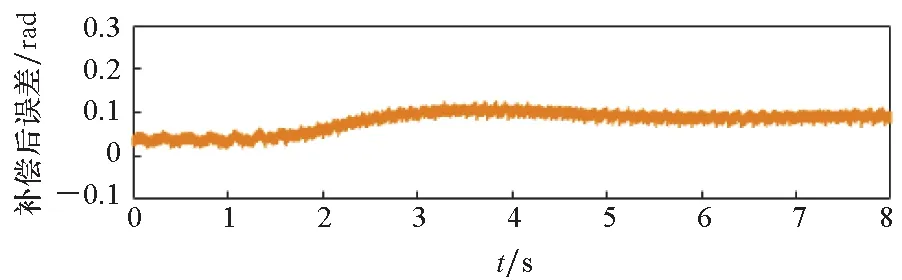
(d) 補償后的轉子位置誤差(d) Rotor position error after compensation圖11 轉速突增實驗波形Fig.11 Experimental waveforms with speed increasing
4 結論
本文結合理論推導闡明了虛擬電流注入法補償轉子位置誤差的機理,分析了會影響虛擬注入法補償效果的因素和改善方法,利用仿真和實驗對所提補償方法進行了驗證,得到如下結論:
1) 利用虛擬注入法能基本消除電機穩態運行時由濾波器導致的轉子位置估算誤差,實驗的幾種工況下采用該方法能使估算的轉子位置誤差減小77%以上。
2) 使用低通濾波器LPF2可以避免正序響應電流對補償效果的干擾,提高穩態補償效果。LPF2對于電機轉速變化延遲在0.05 s內,延遲期間誤差補償精度會受到影響,但不會影響電機正常運行。