絕緣子串激光除冰機(jī)器人人機(jī)交互控制系統(tǒng)設(shè)計(jì)
2021-08-21 09:28:28鄒德華鄺江華劉蘭蘭
武漢紡織大學(xué)學(xué)報(bào) 2021年4期
牛 捷,鄒德華,鄺江華,劉蘭蘭,江 維
(1. 智能帶電作業(yè)技術(shù)及裝備(機(jī)器人)湖南省重點(diǎn)實(shí)驗(yàn)室(國網(wǎng)湖南省電力有限公司輸電檢修分公司),湖南 衡陽 420100;2. 帶電巡檢與智能作業(yè)技術(shù)國家電網(wǎng)公司實(shí)驗(yàn)室(國網(wǎng)湖南省電力有限公司輸電檢修分公司),湖南 衡陽 420100; 3. 武漢紡織大學(xué) 機(jī)械工程與自動化學(xué)院,湖北 武漢 430200)
0 引言
絕緣子是高壓輸電線路上的重要金具,絕緣子串[1-4]是由一串絕緣子首尾相連而成懸掛于輸電桿塔和輸電導(dǎo)線之間,用于保證桿塔與導(dǎo)線之間的絕緣與支撐桿塔的作用,冬季氣候嚴(yán)寒,位于高空野外環(huán)境下的絕緣子串經(jīng)常覆冰嚴(yán)重,這種覆冰不僅增加了桿塔的負(fù)重,還會導(dǎo)致絕緣子串絕緣性能的喪失,特別是絕緣子串上片間絕緣子之間形成的冰凌[5-6]會導(dǎo)致絕緣子短路事故的發(fā)生,這些都嚴(yán)重威脅冬季輸電線路的安全穩(wěn)定運(yùn)行,因此,輸電線路絕緣子除冰作業(yè)是電力工人的一項(xiàng)常規(guī)作業(yè)任務(wù)。目前國內(nèi)外最常用的除冰方法有熱融冰[7-8]、機(jī)械破冰[9-10]、熱融冰需要斷電作業(yè),這樣會造成停電巨大的經(jīng)濟(jì)損失,機(jī)械除冰過程中脫落的冰塊對操作人員的人身安全有極大的威脅,同時(shí),機(jī)械除冰過程中產(chǎn)生的振動對輸電線路結(jié)構(gòu)可能會造成一定的潛在影響,此外,這些除冰方法大多都有作業(yè)效率低、安全隱患大的一些顯著缺陷,而激光[11-12]作為一種清潔能源,不僅能夠?qū)崿F(xiàn)非接觸式的除冰而且控制靈活,特別適合于野外復(fù)雜環(huán)境下的輸電線路絕緣子除冰作業(yè),而與此同時(shí),激光器的搭載裝備是實(shí)現(xiàn)激光器近距離除冰,有效利用能量的關(guān)鍵,傳統(tǒng)的基于機(jī)載平臺[13]的搭載方式在激光能量損耗上較大。
基于上述分析,本文提出了一種利用無人機(jī)搭載激光器實(shí)現(xiàn)輸電線路絕緣子串的除冰新方法,通過無人機(jī)和激光器的協(xié)同控制實(shí)現(xiàn)絕緣子串激光近距離除冰。針對無人機(jī)系統(tǒng)和激光器系統(tǒng)物理上的獨(dú)立而造成的控制分散性問題,本文在激光除冰系統(tǒng)實(shí)現(xiàn)方案的基礎(chǔ)上,深度整合了無人機(jī)控制和激光器的控制,提出了無人機(jī)和激光器深度融合集成方案,基于MFC平臺設(shè)計(jì)并開發(fā)了激光除冰系統(tǒng)的集成式人機(jī)交互平臺,開發(fā)了應(yīng)用軟件,實(shí)現(xiàn)了無人機(jī)-激光器系統(tǒng)的集成化控制,該人機(jī)交互界面友好,操作方便,相比傳統(tǒng)PC端的分散式控制其具有集成式控制特點(diǎn),特別適合于復(fù)雜野外環(huán)境下的輸電線路絕緣子串激光除冰作業(yè),絕緣子串激光除冰是激光技術(shù)與電力系統(tǒng)深度融合的新嘗試和新探索,其研究和實(shí)施對于輸電線路安全、穩(wěn)定、智能運(yùn)維管理,特別是對于推進(jìn)輸電線路除冰作業(yè)方法的實(shí)用化進(jìn)程具有重要意義。
1 絕緣子串激光除冰系統(tǒng)的基本構(gòu)成與作業(yè)過程
1.1 激光器的基本結(jié)構(gòu)
輸電線路絕緣子激光除冰裝備的核心是激光器,其包括機(jī)械部分和電氣部分兩大部分。其機(jī)械部分包括旋轉(zhuǎn)和俯仰兩個(gè)關(guān)節(jié)對激光頭方位和位姿進(jìn)行調(diào)整,其位于激光除冰裝備的前端底部,使得機(jī)器人激光頭可在一定旋轉(zhuǎn)角度和俯仰角度內(nèi)調(diào)整位于激光裝備前端的位置,激光除冰裝備電氣部分主要包括電源、電池、控制器、電壓轉(zhuǎn)換模塊、無線通訊模塊、擴(kuò)束鏡頭等。其中核心激光部件主要包括激光頭、頻率轉(zhuǎn)換裝置、準(zhǔn)直鏡、掃描振鏡、聚焦鏡等,瞄準(zhǔn)裝置可通過電子望遠(yuǎn)鏡將圖像信息傳送給控制系統(tǒng),并在顯示屏上顯示,絕緣子激光除冰裝置的基本結(jié)構(gòu)如圖1所示。
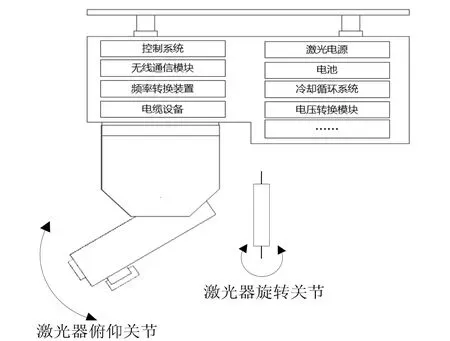
圖1 激光除冰裝置的基本結(jié)構(gòu)
1.2 無人機(jī)與激光器的復(fù)合
激光的能量隨著距離增減逐漸衰減,激光近距離的除冰作業(yè)是完成除冰任務(wù)的關(guān)鍵,因此,本文提出了無人機(jī)搭載激光器的方法,本文所設(shè)計(jì)的無人機(jī)搭載激光除冰裝置的無人機(jī)身,具備一定承載能力,前端與后端具備四個(gè)對稱的旋翼,且每個(gè)旋翼都由一個(gè)無人刷直流電機(jī)控制,無人機(jī)身具備電源進(jìn)行供電。無人機(jī)身底端布置有螺紋孔,用于與聯(lián)接件連接,無人機(jī)身二維示意圖如圖2(a)所示。基于無人機(jī)搭載的超高壓絕緣子激光除冰裝置主要包括:四旋翼無人機(jī)身、聯(lián)接件,其布置在無人機(jī)身下端,與無人機(jī)身布置的螺栓孔緊固連聯(lián)接;激光裝備,其布置在聯(lián)接件下端,與聯(lián)接件螺栓緊固連接,用于發(fā)射激光清理覆冰。無人機(jī)平臺復(fù)合后的激光除冰系統(tǒng)三維模型圖如圖2(b)所示。
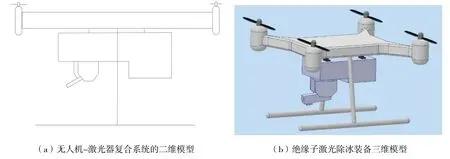
圖2 基于無人機(jī)的激光除冰系統(tǒng)的總體實(shí)現(xiàn)
1.3 絕緣子激光除冰作業(yè)運(yùn)動規(guī)劃
合理的除冰作業(yè)運(yùn)動規(guī)劃是完成絕緣子除冰作業(yè)的關(guān)鍵。首先,無人機(jī)平臺搭載激光除冰裝備飛行至合適位置并通過激光頭的俯仰機(jī)構(gòu)調(diào)節(jié)對絕緣子串一側(cè)進(jìn)行掃描除冰,當(dāng)一側(cè)絕緣子串覆冰清除完成后,飛行至另一側(cè)進(jìn)行除冰作業(yè)。通過無人機(jī)和激光除冰裝備的協(xié)同作業(yè)運(yùn)動控制,并重復(fù)上述過程實(shí)現(xiàn)整串絕緣子覆冰的激光除冰作業(yè),如圖3示為完整的激光除冰裝備除冰作業(yè)過程和二維作業(yè)運(yùn)動規(guī)劃。

圖3 激光絕緣子除冰機(jī)器人作業(yè)運(yùn)動規(guī)劃
2 絕緣子串激光除冰機(jī)器人人機(jī)交互系統(tǒng)控制架構(gòu)
激光除冰機(jī)器人人機(jī)交互系統(tǒng)架構(gòu)如圖4所示,人機(jī)交互控制系統(tǒng)包括運(yùn)動交互控制系統(tǒng)和作業(yè)后臺管理系統(tǒng),均可基于Win10操作系統(tǒng)設(shè)計(jì),可統(tǒng)一采用C++語言、基于面向?qū)ο蟮拈_發(fā)方法,通過Socket網(wǎng)絡(luò)通信。運(yùn)動交互控制平臺通信層與指令協(xié)議同機(jī)器人本體一致,負(fù)責(zé)所有控制指令的收發(fā)以及圖片、視頻信息的傳輸。運(yùn)動控制系統(tǒng)主要由機(jī)器人狀態(tài)查詢顯示、運(yùn)動控制、除冰作業(yè)任務(wù)部署及攝像頭遠(yuǎn)程監(jiān)控單元組成。其中,激光除冰機(jī)器人還擁有一套數(shù)據(jù)庫系統(tǒng),可用來存儲機(jī)器人除冰作業(yè)數(shù)據(jù),包括機(jī)器人自主除冰作業(yè)所需的線路信息數(shù)據(jù)、除冰作業(yè)日志數(shù)據(jù)以及除冰結(jié)果數(shù)據(jù)等。除冰作業(yè)后臺管理系統(tǒng)負(fù)責(zé)管理維護(hù)除冰作業(yè)數(shù)據(jù),包含線路絕緣子除冰信息的錄入與修改、除冰效果的導(dǎo)入與分類、故障分析與診斷、出具除冰作業(yè)報(bào)告等功能。機(jī)器人人機(jī)交互控制的主要功能是遠(yuǎn)程對激光除冰裝備發(fā)送控制命令,除冰裝備在獲得接收到指令后進(jìn)行相應(yīng)除冰動作,同時(shí)將除冰作業(yè)過程中的關(guān)鍵狀態(tài)通過無線的方式傳輸給上層軟件,通過網(wǎng)絡(luò)解析,將現(xiàn)場作業(yè)狀態(tài)顯示到控制界面上,從而實(shí)現(xiàn)系統(tǒng)控制命令和運(yùn)行狀態(tài)的雙向傳輸控制。
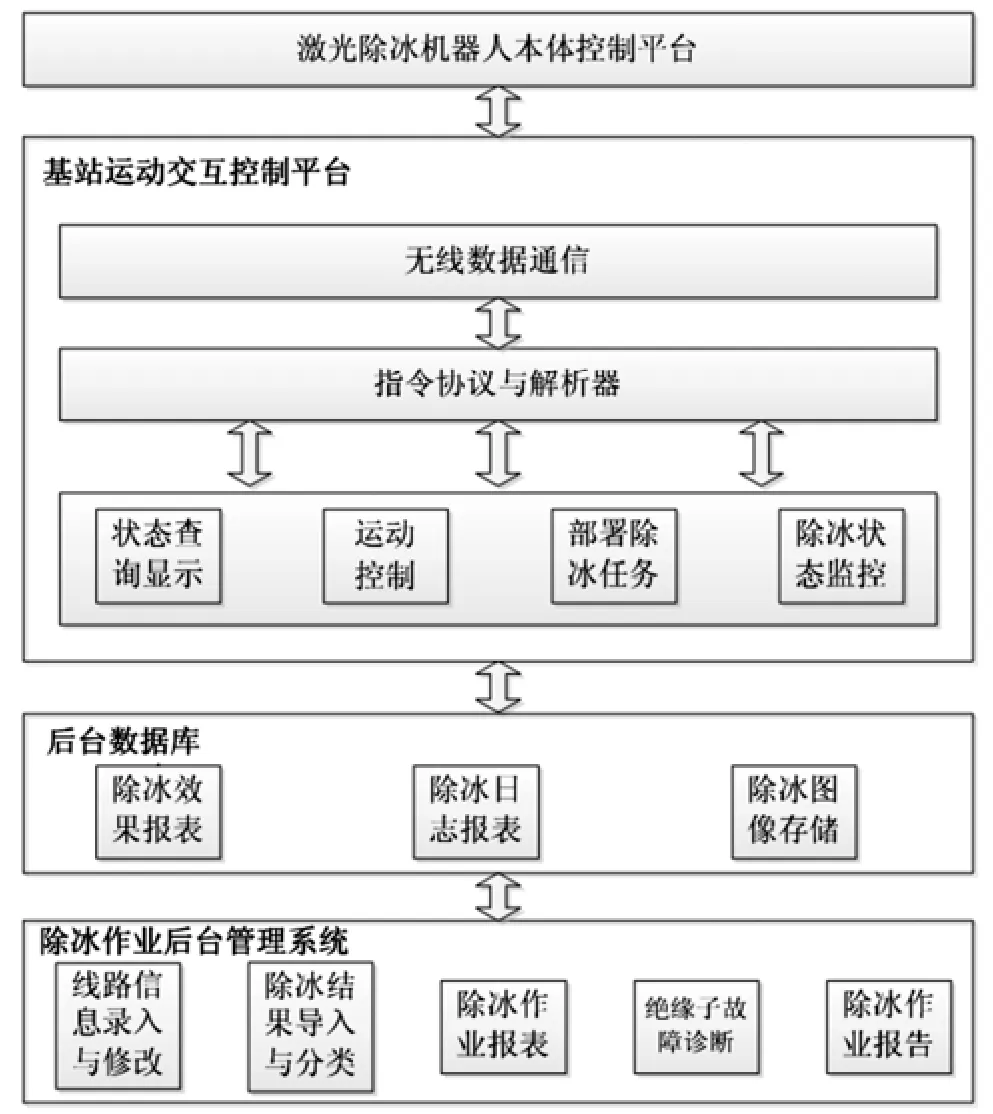
圖4 絕緣子激光除冰機(jī)器人人機(jī)交互系統(tǒng)架構(gòu)
3 絕緣子串激光除冰機(jī)器人的協(xié)同人機(jī)交互控制系統(tǒng)設(shè)計(jì)
輸電線路絕緣子串激光除冰機(jī)器人主要包括兩大部分,四旋翼無人機(jī)系統(tǒng)和激光器系統(tǒng),四旋翼無人機(jī)主要負(fù)責(zé)搭載激光器系統(tǒng)去接近輸電線路上的絕緣子冰凌,其飛行控制主要包括無人機(jī)“上升”、“下降”、“左飛”、“右飛”等基本運(yùn)動,此外,對于無人機(jī)為實(shí)現(xiàn)既定目標(biāo)的精準(zhǔn)定位與自主捕捉導(dǎo)航還具有一鍵自主導(dǎo)航功能,同時(shí),無人機(jī)在飛行過程中需要將線路環(huán)境的視頻圖像信息通過無線的方式傳遞到控制終端,因此,無人機(jī)還具有開啟錄像的功能,最后無人機(jī)的續(xù)航能力與其電力消耗息息相關(guān),因此,在關(guān)鍵狀態(tài)中需要設(shè)置無人機(jī)電能監(jiān)控窗口。激光器系統(tǒng)的控制又可以分為激光器系統(tǒng)的參數(shù)設(shè)置控制和激光器系統(tǒng)的運(yùn)動控制兩大部分,其中,激光器系統(tǒng)的參數(shù)控制,主要是調(diào)節(jié)激光的參數(shù),這些參數(shù)與激光的性能息息相關(guān),同時(shí)也影響激光除冰效果,最典型的性能包括,激光功率設(shè)置、激光掃射速度設(shè)置、激光掃射頻率設(shè)置、激光掃射形態(tài)設(shè)置,同時(shí)還具有開光延時(shí)、關(guān)光延時(shí)、結(jié)束延時(shí)等輔助控制功能,待激光參數(shù)設(shè)置完成后可以開啟“激光”,替換“紅光”,“激光”是帶有能量的光,而“紅光”只是指示光。激光器系統(tǒng)的運(yùn)動控制主要包括俯仰和旋轉(zhuǎn)兩個(gè)自由度的運(yùn)動控制,兩個(gè)關(guān)節(jié)都可以實(shí)現(xiàn)位置環(huán)和速度環(huán)的控制,其基本功能包括加速、減速、停止等功能。除激光器和無人機(jī)的控制外,還有一些系統(tǒng)的關(guān)鍵狀態(tài)如系統(tǒng)網(wǎng)絡(luò)連接、無人機(jī)電源、激光器電源、視頻圖像傳輸狀態(tài)等關(guān)鍵信息都需要實(shí)時(shí)監(jiān)測與控制,基于上述分析,可以設(shè)計(jì)如圖5所示的無人機(jī)-激光器復(fù)合的除冰機(jī)器人人機(jī)交互控制系統(tǒng),該控制平臺可以實(shí)現(xiàn)無人機(jī)、激光器的集成化控制。

圖5 激光除冰機(jī)器人控制界面設(shè)計(jì)
4 結(jié)論與展望
本文針對輸電線路無人機(jī)-激光器絕緣子激光除冰系統(tǒng)軟件控制平臺的分散性問題,提出了一種集成化的人機(jī)交互控制實(shí)現(xiàn)方案,將無人機(jī)控制和激光器的控制集成在同一人機(jī)交互控制界面上,基于MFC設(shè)計(jì)了人機(jī)交互控制界面并開發(fā)了相應(yīng)控制軟件,其界面友好、操控方便,特別適用于野外環(huán)境下激光除冰作業(yè)集成化控制,實(shí)現(xiàn)了激光技術(shù)在電力系統(tǒng)中的創(chuàng)新應(yīng)用,同時(shí)本文所提出的激光除冰系統(tǒng)和除冰新方法還需要在進(jìn)一步的實(shí)驗(yàn)中來探索激光器和無人機(jī)運(yùn)動的最優(yōu)控制參數(shù),進(jìn)一步實(shí)現(xiàn)激光除冰系統(tǒng)的自動化和智能化作業(yè)以提高其電力系統(tǒng)應(yīng)用的工程實(shí)用性。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
新作文·小學(xué)低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學(xué)生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08