基于神經工效學的智能車輛橫向控制模型研究*
2021-08-12 08:14:00郭應時張洪加
汽車工程 2021年7期
郭應時,張洪加,付 銳,王 暢
(長安大學汽車學院,西安 710064)
前言
駕駛人模型能夠幫助我們解釋和仿真真實的駕駛行為,對提升輔助駕駛系統和自動駕駛系統的安全性具有重要意義[1-2]。駕駛人模型最早是由McRuer等[3]提出的Crossover補償跟隨模型,但該模型沒有考慮人-車-路三者的交互關系。郭孔輝等[4]考慮駕駛人的預瞄、跟隨和延遲等特性,提出了預瞄模型。Shi等[5]基于車輛測試數據和神經網絡提出了類人駕駛員模型。辛喆等[6]通過模型預測控制(MPC)結合二次型代價函數構建了軌跡跟蹤控制器,并在正常工況和極限工況下進行了測試。郭應時等[7]基于線性二次調節器建立了軌跡跟蹤模型,結果表明,帶有前饋控制的軌跡跟蹤模型有較好的擬人化效果。Treiber等[8]提出了智能駕駛員模型,模型能準確地描述駕駛人縱向操作行為,后被Rahman等[9]應用到了自適應巡航控制。龔建偉等[10-11]在MPC算法的基礎上,設計了軌跡規劃-跟蹤控制的雙重控制系統,較好地實現了軌跡跟蹤控制。陳虹等[12]利用MPC算法對駕駛行為進行了建模,并在veDYNA中進行了仿真驗證,取得了較好的效果。管欣等[13]在預瞄-跟隨理論的基礎上,提出了用于駕駛員操縱行為建模的穩態預瞄動態校正的假說。
隨著認知心理學的發展,一些學者開始將心理學應用到駕駛人模型的研究。Aasman等[14]建立了一種基于State Operator and Result認知體系的駕駛人車輛控制計算模型,在一定程度上揭示了駕駛人對車輛的認知機理。Salvucci等[15]建立了基于Adaptive Control of Thought?Rationa(lACT?R)認知體系的駕駛人模型。Li等[16]基于ACT?R體系框架建立了駕駛人模型,該模型具有一定的擬人化特征,但ACT?R體系處理復雜駕駛任務的能力不強。Liu等[17]提出了基于神經工效學認知模型,即排隊網絡(Queuing Network?Model Human Processor),并基于此建立了車輛橫向控制模型,該模型能很好地反映人的認知機理。畢路拯等[18-19]提出了基于擴展排隊網絡和腦機接口(BCI)相結合的駕駛員腦控轉向模型,所提出的模型具有較好的控制性能。
由文獻回顧可見,全面系統地揭示駕駛人的控制機理和認知機理的研究較少。鑒于此,本文中首先引入了基于神經工效學的認知體系框架[17-20],該體系能較好地反映出駕駛人的認知能力,并具有較強的處理復雜駕駛任務的能力;其次,引入了MPC算法,該算法能夠滿足車輛在高速行駛時對軌跡跟蹤實時性的要求,并能實現控制過程中的滾動優化;最后,為建立更加真實的駕駛人模型,引入了手臂肌肉模型。通過融合上述3個模塊,最終建立了一種基于神經工效學的智能車輛橫向控制模型。該模型的主要特點為:(1)可較好地反映駕駛員認知能力和生理局限;(2)從控制角度解釋了駕駛人的駕駛機理;(3)反映了駕駛人手臂肌肉系統和車輛轉向系統之間的動態交互。
1 神經工效學認知體系框架
圖1為智能車輛橫向控制模型框架,主要由融合MPC算法的神經工效學認知體系架構、手臂肌肉模型和車輛動力學模型組成。本節主要介紹神經工效學認知體系架構。神經工效學認知體系是一種網絡架構模型,通過概括抽象人腦對外部信息獲取、加工和使用等一系列過程而提出,神經工效學認知體系框架如圖2所示。認知體系將人對信息處理過程簡化為感知、認知和運動3個子網絡,每個子網絡分別由服務器(圖2中的方框)、路徑(圖2中的黑色箭頭)和實體3個部分組成,不同的服務器對應人體大腦中不同的區域,代表不同的功能;路徑代表信息的傳遞途徑;實體作為承載信息的載體在不同服務器之間流動。在認知體系中,人的認知過程為:信息由實體攜帶至感知子網絡先行處理,再由認知子網絡中的相關服務器進行加工處理,產生相應的指令,最后由實體攜帶指令至運動子網絡,運動子網絡中的相關服務器將該指令轉化為實際的執行動作。
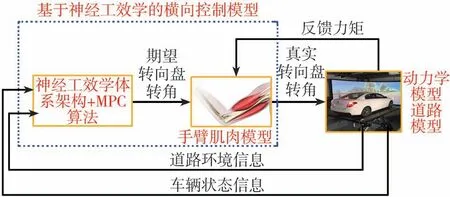
圖1 智能車輛橫向控制模型框架

圖2 神經工效學認知體系架構
本文中認知體系架構的輸入為道路中心線和車輛的動力學信息(視覺信息),輸出為期望的轉向盤轉角。模擬駕駛人信息處理的過程為:實體承載著視覺信息進入感知子網絡,經服務器1→服務器2/服務器3→服務器4加工處理后,再經認知子網絡中的服務器A→決策服務器F進行處理,給出決策指令,最后,實體承載著認知子網絡的決策指令,進入運動子網絡,經服務器W、Y和Z加工處理后,輸出期望的轉向盤轉角。須指出的是MPC算法被融合到認知子網絡中F服務器,提供決策指令。神經工效學認知體系使用Matlab/Simulink中的SimEvents模塊建模,在SimEvents模塊中包含了服務器、路徑和實體,可有效地對神經工效學認知體系進行模擬。
2 基于MPC的車輛橫向控制模型建立
2.1 車輛動力學模型
本文中假設如下:(1)車輛左右兩側車輪的橫向作用力在車輛坐標系下對稱相等;(2)忽略坡度等因素對車輛垂直運動的影響;(3)忽略懸架系統、空氣阻力和輪胎縱橫向耦合等因素的影響。
根據假設,建立車輛單軌動力學模型,如圖3所示。
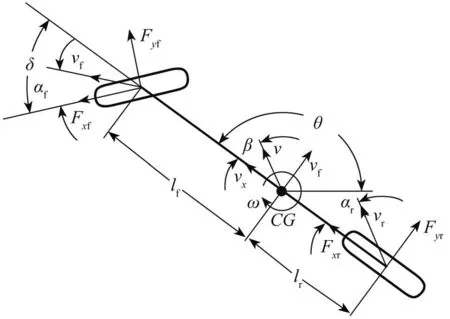
圖3 車輛單軌動力學模型
根據牛頓第二定律,車輛質心CG在坐標系中分別沿x軸、y軸和繞z軸受力平衡,因此其動力學方程可描述為
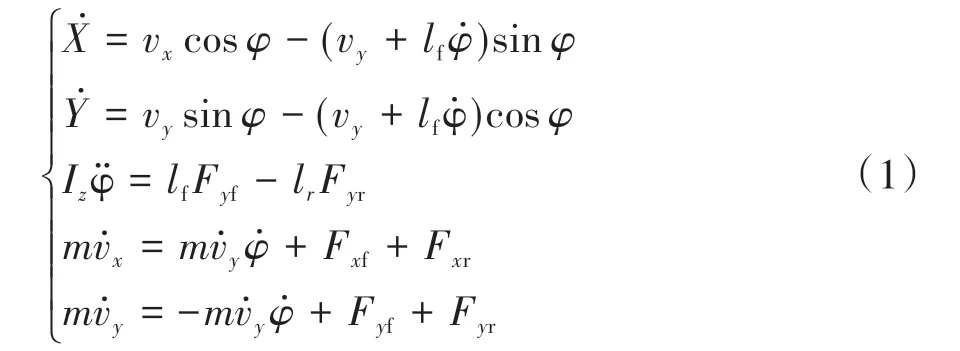

其中:

采用1階差商對式(2)進行離散化處理,得到離散的狀態空間表達式:

其中:Ac(k)=Ic+T Ac(t);Bc(k)=Ic+T Bc(t)式中T為采樣時間。
2.2 模型預測控制器建立
2.2.1 目標函數設計
為保障車輛能夠迅速且精確平穩地跟蹤期望軌跡,須考慮系統狀態量偏差和控制增量這兩個主要因素,因此本文中所設計的MPC控制器采用如式(4)形式的目標函數:
式中:Ncp和Ncc為控制器的預測時域和控制時域;Qc和Rc為權重矩陣;ρ為權重系數;ε為松弛因子;ηpref為軌跡規劃器輸出的期望軌跡;ηc為預測軌跡;U為控制時域內的控制量。
在目標函數中,須基于線性誤差模型計算預測時域內車輛未來時刻的輸出,將式(3)轉換為
式中:n為狀態量維度;m為控制量維度。
為簡化計算,假設k=1,...,t+N-1,推導得到系統的預測輸出表達式為


將式(6)代入式(4),即可得到完整的目標函數。
2.2.2 約束條件設計
在軌跡跟蹤控制過程中,控制量受最大轉向角δfmax約束,考慮到行駛穩定性和轉向過程中車輛不能超過道路邊界,還須設置控制增量約束和道路邊界約束:
在目標函數中,求解的變量為控制時域內的控制增量,因此須將控制量轉換為控制增量與轉換矩陣相乘的形式:

其中:Uc=I Ncc?υc(k-1)
式中:I Nc表示行數為Nc的列向量;I m表示維度為m的單位矩陣;?表示克羅內克積。
2.3 駕駛人手臂肌肉模型建立
本文中所建立的手臂肌肉模型基于Pick和Cole提出的手臂肌肉動力學模型[21]發展而來。在此基礎上,為便于模型的建立與仿真,同時又能保證系統原有的性能,本文中簡化了手臂肌肉系統模型的反射模塊,將帶有滯后環節的1階濾波器模塊簡化為帶有滯后環節的增益模塊。簡化后的手臂肌肉模型主要由3個模塊組成:反射控制器、手臂轉向系統和內部參考模型,如圖4所示。該模型以認知體系下駕駛人橫向控制模型輸出的期望轉向盤轉角作為輸入,通過手臂肌肉模型的傳遞,輸出一個真實的轉向盤轉角。
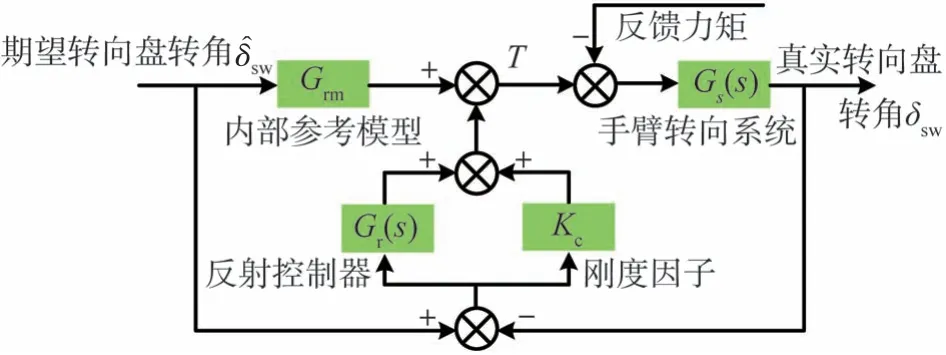
圖4 手臂肌肉模型
反射控制器模塊的傳遞函數為

式中:Kr為反射增益;τ為延時參數。
手臂轉向系統的傳遞函數表達式為

式中:J為轉動慣量;B為阻尼;K為剛度。
本文中所使用的內部參考模型Grm是角度-轉矩剛度。參照文獻[21],本模型中將τ值設置為τ=0.04 s,Grm=0.1 N·m/rad,Kr=5 N·m/rad,J、B和K的值分別為0.064 kg?m2、0.56 N·m?s/rad和3.80 N·m/rad。
3 基于CarSim/Simulink駕駛人模型聯合仿真驗證
3.1 聯合仿真平臺的搭建
聯合仿真平臺是基于CarSim和Matlab/Simulink搭建而成的。在車輛穩定性測試中,本文的參考軌跡選擇標準雙移線工況。仿真車輛為C?Class Hatchback車型,輪胎選擇225/60 R18,前后懸架采用獨立懸架,仿真中用到的動力學模型基本參數如表1所示。
3.2 不同工況下的仿真結果
3.2.1 不同路面附著系數
為測試控制器的魯棒性,選擇正常路面附著系數μ=0.8,濕滑路面的附著系數μ=0.4兩種路面情況進行仿真測試。為進一步評價控制器性能,將基于神經工效學的智能車輛橫向控制模型與MPC算法進行比較。仿真車速設置為15 m/s,仿真結果如圖5所示。
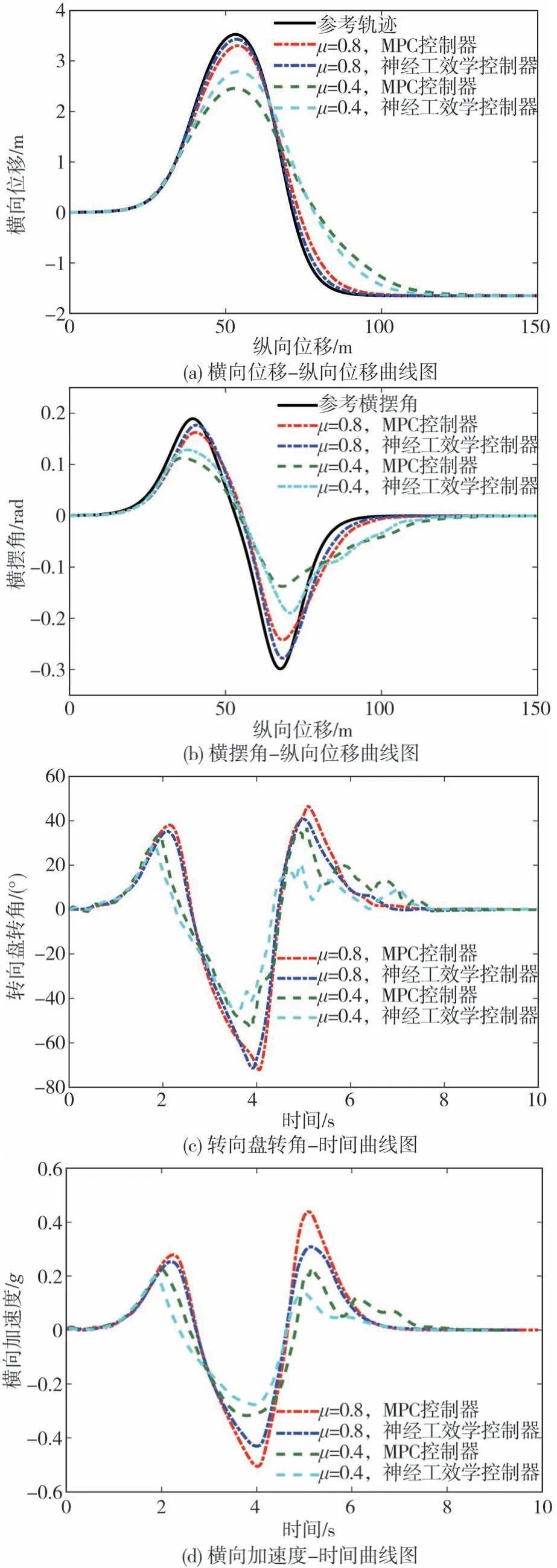
圖5 不同附著系數下的仿真結果
由圖5(a)可知,在附著系數為0.8時,本文中提出的神經工效學控制器的跟蹤效果優于MPC控制器。附著系數為0.4時,兩控制器的軌跡跟蹤誤差都顯著增大,但神經工效學控制器的跟蹤誤差小于MPC控制器,軌跡更接近參考軌跡。由圖5(b)可知,當附著系數為0.8時,神經工效學控制器稍優于MPC控制器,車輛橫擺角能很快地收斂到參考橫擺角。當附著系數為0.4時,由于路面無法提供車輛需要的側向力,此時橫擺角會出現大的偏差,單純的MPC控制器偏差相對較大。
由圖5(c)可知,當附著系數為0.4時,神經工效學控制器與MPC控制器相比性能更優,轉向盤轉角變化相對小。但由于附著系數較小,兩種控制器下的轉向盤轉角均有一定的抖動。當附著系數為0.8時,兩種控制器的轉向盤轉角均變大,神經工效學控制器與MPC控制器相比角度變化更加平滑。由圖5(d)可知,當附著系數為0.8時,兩種控制器的橫向加速度波動幅度較大,但變化趨勢相對平緩,MPC控制器的控制效果相對較差;當附著系數為0.4時,神經工效學控制器的橫向加速度波動幅度較小,優勢明顯。
3.2.2 不同車輛速度
為驗證兩種控制器在不同車速下的魯棒性,本文取車速v=10 m/s和v=30 m/s兩種情況,路面附著系數均為μ=0.8。仿真結果如圖6所示。
由圖6(a)可知,當車速為10 m/s時,神經工效學控制器與MPC控制器均有較高的跟蹤精度,但神經工效學控制器的精度更高。當車速為30 m/s時,兩種控制器的跟蹤精度有所下降,產生該現象的原因可能是車速較高時,車輛操縱穩定性變差。相比之下,MPC控制器的軌跡誤差更大。由圖6(b)可知,當車速較低時,神經工效學控制器的橫擺角能很好地收斂到參考橫擺角且變化平緩,相對較優。當車速較高時,縱向力較大,側向力較小,地面不能提供足夠的側向附著力,此時MPC控制器下的橫擺角波動較神經工效學控制器明顯。
由圖6(c)可知,當車速為10 m/s時,兩控制器下的轉向盤轉角變化率都相對平緩,但相比之下,神經工效學控制器變化幅度相對小,更加穩定;當車速為30 m/s時,兩控制器下的轉向盤轉角速度均增大。由圖6(d)可知,當車速較低時,神經工效學控制器較MPC控制器的橫向加速度變化幅度更低,變化平緩;當車速較高時,神經工效學控制器的橫向加速度波動幅度較小,呈現出一定的優勢。
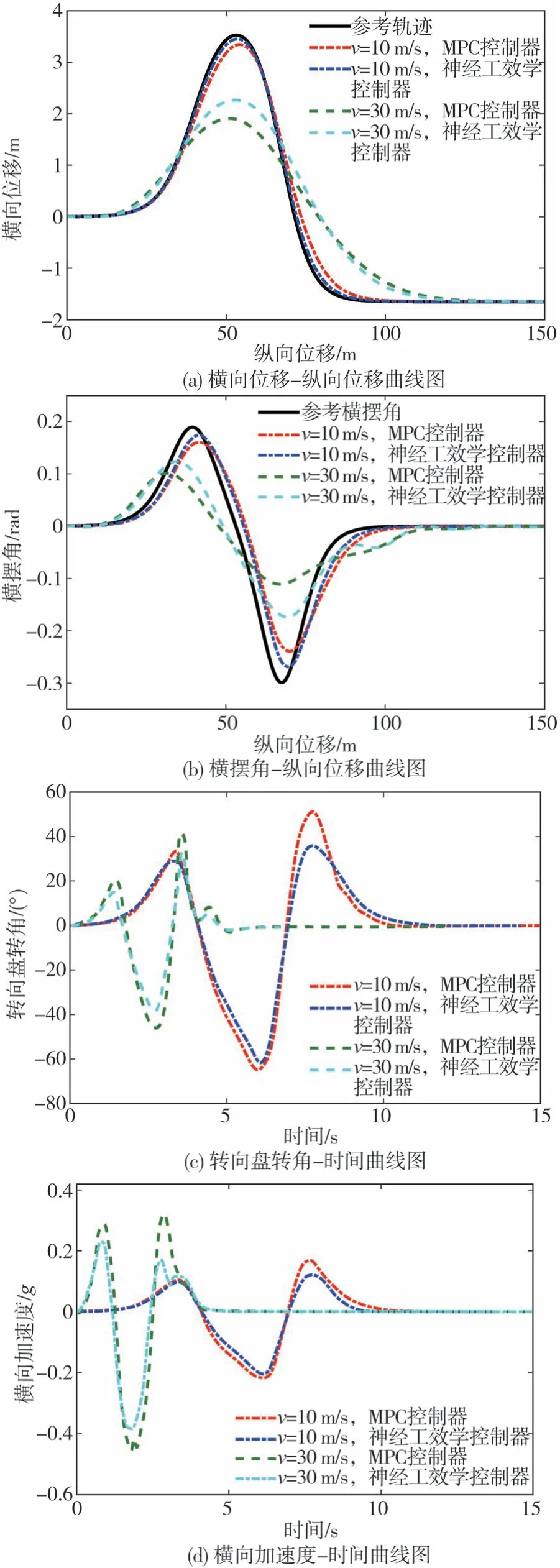
圖6 不同速度下的仿真結果
通過對不同附著系數和不同速度下的控制器魯棒性分析,本文中提出的基于神經工效學的智能車輛橫向控制模型在性能上優于MPC控制器。
4 基于神經工效學的車輛橫向控制模型硬件在環測試
4.1 硬件在環仿真平臺的整體框架
dSPACE/駕駛模擬器實時仿真平臺的整體框架如圖7所示,工作流程為:首先,在Matlab/Simulink中使用S?function編寫基于神經工效學的智能車輛橫向控制算法,進而編譯成dSPACE可以運行的C語言代碼;其次,利用ControlDesk軟件,將生成的代碼加載到dSPACE中,駕駛模擬器作為被控車輛,dSPACE與駕駛模擬器兩者之間通過以太網進行數據傳輸;最后,dSPACE根據控制算法,結合當前的車輛狀態信息和道路信息,計算出期望的轉向盤轉角,通過以太網發送給駕駛模擬器,駕駛模擬器根據接收到的轉向盤轉角做出相應的調整,將調整后的車輛狀態信息再次發送給dSPACE,以此形成閉環的控制回路,實現對車輛的控制。dSPACE與駕駛模擬器的數據交互模型在Matlab/Simulink中的體現如圖8所示。
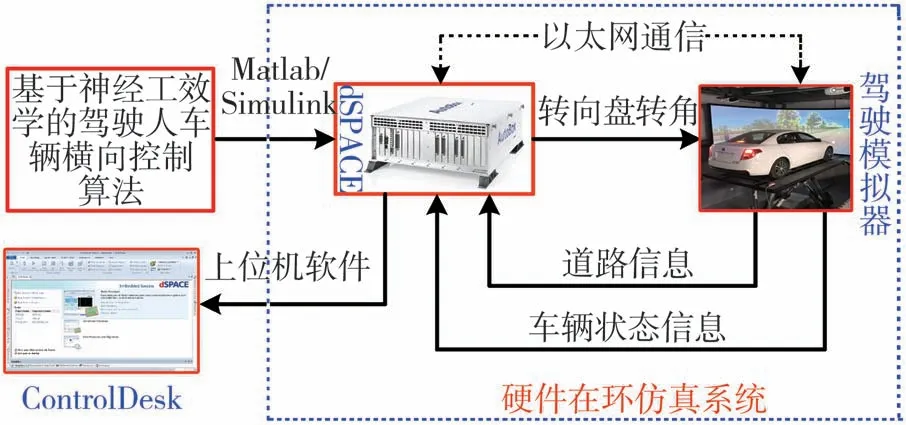
圖7 硬件在環仿真系統架構與模擬器

圖8 硬件在環仿真駕駛人橫向控制系統模型
4.2 直線路段的實時仿真測試結果
選取一段直線路段,以v=10 m/s和v=30 m/s兩種速度對所設計的控制器進行實時在線測試驗證,仿真結果如圖9所示。
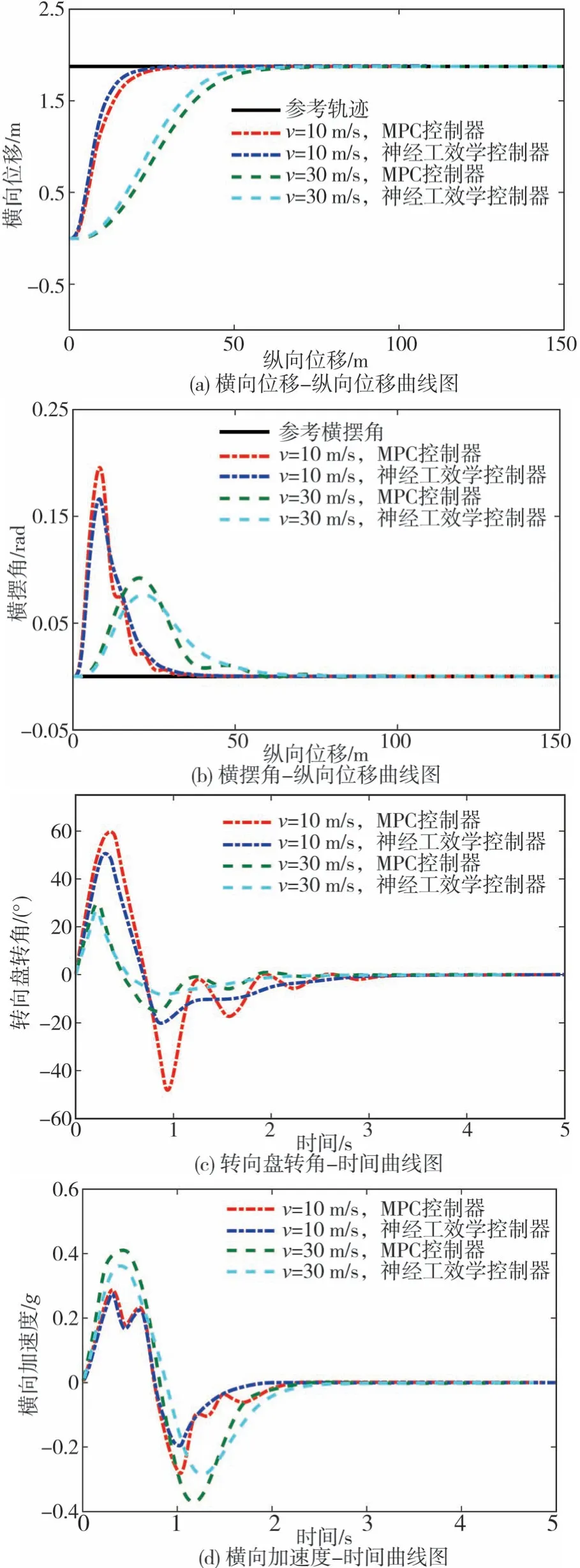
圖9 直線路段實時仿真結果
由圖9(a)可知,不同速度下,兩控制器都能在一定的時間內跟蹤上期望軌跡。但低速時,兩控制器能快速地收斂到期望軌跡,高速時收斂則較慢,這是因為速度較高時,轉向盤轉角調整頻率較慢。然而,不論低速還是高速,神經工效學控制器均優于MPC控制器。由圖9(b)可知,兩種控制器在直線跟蹤過程中,橫擺角均能快速地收斂到期望值,速度較高時收斂的較慢,速度較低時收斂的較快。神經工效學控制器呈現了比MPC控制器更好的性能,橫擺角在收斂時更加平滑穩定。
由圖9(c)可知,以不同的速度跟蹤直線路段時,轉向盤的調整幅度和頻率差別較大。速度較低時,轉向盤調整幅度較大,高速時,轉向盤轉角變化幅度小。兩種算法相比時,神經工效學控制器波動較小,呈現出一定的優勢。由圖9(d)可知,在高速時,兩種控制器橫向加速度的波動幅度較低速時大。兩種控制器相比,低速時,神經工效學控制器更加平穩;高速時,神經工效學控制器優勢則相對明顯。
4.3 曲線路段的實時仿真測試結果
選取一段曲線路段,以v=10 m/s和v=30 m/s兩種速度對基于神經工效學的智能車輛橫向控制器和MPC控制器進行實時在線仿真,仿真結果如圖10所示。
由圖10(a)可知,不同速度下,兩種控制器都能在一定的時間內跟蹤上期望軌跡,但神經工效學控制器的跟蹤精度更優。由圖10(b)可知,車輛在曲線跟蹤過程中,兩種控制器都能很快收斂到期望值。高速時,神經工效學控制器輸出的橫擺角更接近于參考橫擺角,控制性能更優。低速時,就整體而言,神經工效學控制器并未呈現出比MPC控制器更好的性能。
由圖10(c)可知,高速情況下,轉向盤轉速較低速時大。兩控制器相比,神經工效學控制器的輸出轉向盤轉角波動較小,性能較MPC控制器更優。由圖10(d)可知,兩種控制器在高速時橫向加速度的波動幅度較低速時大。兩控制器相比,無論在低速還是高速,MPC控制器的橫向加速度波動幅度均高于神經工效學控制器,神經工效學控制器法呈現出了一定的優勢。
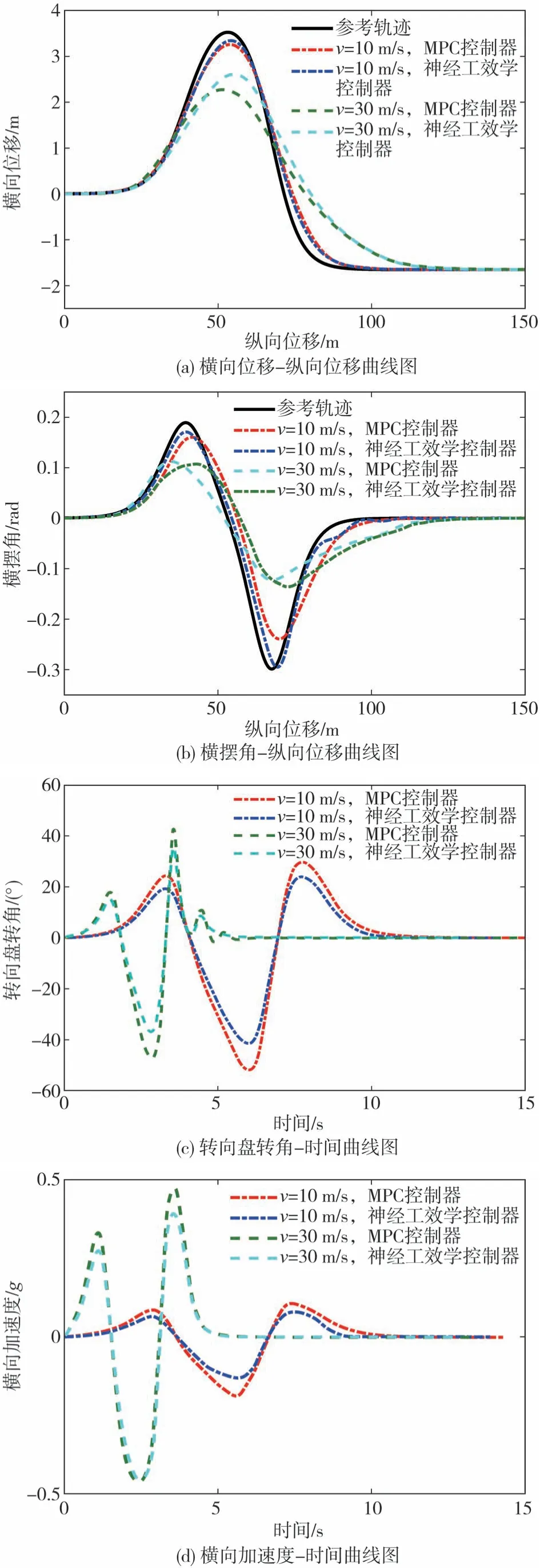
圖10 曲線路段實時仿真結果
通過對兩控制器在直線路段和曲線路段的對比分析可知,本文中提出的基于神經工效學的智能車輛橫向控制模型具有更好的控制效果。
5 結論
(1)本文中基于神經工效學認知體系融合MPC算法和手臂肌肉模型,建立了一種新型駕駛人車輛橫向控制模型。相比于現有的駕駛人車輛控制模型,該模型從駕駛人的認知角度和控制角度兩方面解釋了駕駛人的駕駛機理。
(2)通過CarSim&Simulink軟件聯合仿真和dSPACE/駕駛模擬器的硬件在環仿真對建立的基于神經工效學的智能車輛橫向控制模型進行驗證。基于神經工效學的駕駛人車輛橫向控制算法在直線和曲線路段,低速和高速工況都有較好的性能,總體上優于MPC算法。本文中模型的提出對于提高輔助駕駛系統或自動駕駛系統等方面的安全性和舒適性具有重要意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
新世紀智能(數學備考)(2020年11期)2021-01-04 00:38:16
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中國外匯(2019年17期)2019-11-16 09:31:14
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
現代企業(2015年1期)2015-02-28 18:43:18
新高考·高一物理(2014年1期)2014-09-18 01:26:07
中國火炬(2010年7期)2010-07-25 10:26:09