基于AMESim的閉式液缸舉升系統(tǒng)仿真研究*
2021-08-09 11:54:46鄭萬里
石油機(jī)械 2021年8期
關(guān)鍵詞:系統(tǒng)
李 歡 李 鵬 李 磊 范 松 鄭萬里
(寶雞石油機(jī)械有限責(zé)任公司;國(guó)家油氣鉆井裝備工程技術(shù)研究中心)
0 引 言
海洋鉆井舉升系統(tǒng)具備起下鉆、安裝回收隔水管和水下設(shè)備等重要功能,其性能優(yōu)劣決定了整個(gè)海洋鉆探作業(yè)的能效[1]。按照驅(qū)動(dòng)方式分,海洋鉆井舉升系統(tǒng)可分為絞車驅(qū)動(dòng)和液缸驅(qū)動(dòng)兩種形式。絞車驅(qū)動(dòng)舉升系統(tǒng)由于其優(yōu)異的調(diào)速特性,已被絕大多數(shù)海洋鉆井平臺(tái)(鉆井船)采用[2];液缸驅(qū)動(dòng)舉升系統(tǒng)是最近20年來才逐漸發(fā)展成熟的技術(shù),與絞車舉升系統(tǒng)相比,其在整體質(zhì)量、重心控制以及甲板占用空間等方面具有明顯的優(yōu)勢(shì),在新建深水和超深水鉆井平臺(tái)(鉆井船)上應(yīng)用越來越多[3-4]。
全球絕大部分液缸舉升系統(tǒng)被NOV和Aker MH兩家公司所壟斷。其中,以Aker MH公司的RamRig技術(shù)最為突出,由于其主舉升液缸可實(shí)現(xiàn)能量回收和鉆柱補(bǔ)償功能,比NOV公司的液缸舉升方案省去了單獨(dú)配置的鉆柱補(bǔ)償裝置,所以集成度更高,優(yōu)勢(shì)明顯[5-6]。液缸舉升系統(tǒng)在國(guó)內(nèi)的研制和應(yīng)用進(jìn)展相對(duì)較慢,僅寶雞石油機(jī)械有限責(zé)任公司的產(chǎn)品在“海洋地質(zhì)十號(hào)”科考船上實(shí)現(xiàn)了應(yīng)用,但其整體技術(shù)水平與國(guó)外成熟產(chǎn)品有較大差距[7-9]。為此,本文在分析國(guó)外成熟產(chǎn)品功能和技術(shù)參數(shù)的前提下,提出閉式液缸舉升系統(tǒng)的關(guān)鍵技術(shù)和液壓原理,并結(jié)合軟件仿真研究系統(tǒng)的性能,以期為后續(xù)產(chǎn)品的實(shí)船應(yīng)用提供理論依據(jù)。
1 原理概述
閉式液缸舉升系統(tǒng)原理如圖1所示。
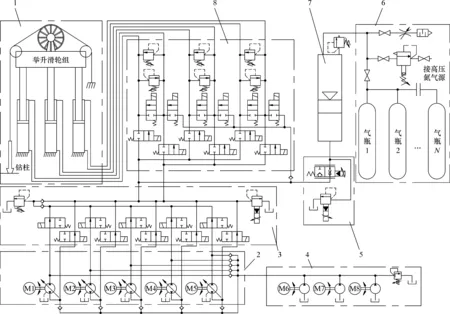
1—舉升液缸;2—閉式泵組;3—油路切換閥組;4—補(bǔ)油泵組;5—蓄能器流量控制閥組;6—?dú)馄考罢{(diào)壓裝置;7—蓄能器;8—液缸控制閥組。
該系統(tǒng)由舉升液缸、滑輪組和繩系等組成,以閉式泵組為主液壓源,由于液缸塞腔與桿腔的面積不同,補(bǔ)油泵組為閉式液缸舉升系統(tǒng)提供額外的液壓源,還具有沖洗和散熱作用。油路切換閥組用于切換供油油路,這樣即使單個(gè)主泵失效也不影響整個(gè)舉升系統(tǒng)工作。液缸控制閥組用于控制工作液缸的數(shù)量,可實(shí)現(xiàn)工作液缸數(shù)量的任意切換,還可連通液缸的桿腔和塞腔,使液缸進(jìn)入柱塞缸模式,在該模式下液缸可對(duì)下放勢(shì)能進(jìn)行回收。蓄能器在液壓系統(tǒng)中起儲(chǔ)能作用,鉆柱補(bǔ)償時(shí)還可承擔(dān)鉆桿的重力。氣瓶增加了蓄能器的氣端容積,調(diào)壓裝置可對(duì)氣瓶?jī)?nèi)部壓力進(jìn)行調(diào)節(jié)。蓄能器流量控制閥組是能量回收和釋放的關(guān)鍵裝置,其集成的比例調(diào)速閥用于控制蓄能器吸收和釋放能量的通流流量,進(jìn)而實(shí)現(xiàn)該模式下的速度控制,比例溢流閥用于保證蓄能器充滿液壓油之后將多余的油液溢流回油箱。
2 關(guān)鍵技術(shù)研究
2.1 提升及下放流體控制技術(shù)
舉升系統(tǒng)對(duì)負(fù)載進(jìn)行提升和下放時(shí),利用閉式液壓泵為舉升液缸的塞腔和桿腔供油。由于液缸塞腔和桿腔的面積差,提升負(fù)載時(shí),補(bǔ)油泵為液缸桿腔側(cè)油路補(bǔ)油,下放負(fù)載時(shí),多余的油液通過液缸桿腔側(cè)的溢流閥流出。提升下放速度控制流程如圖2所示。
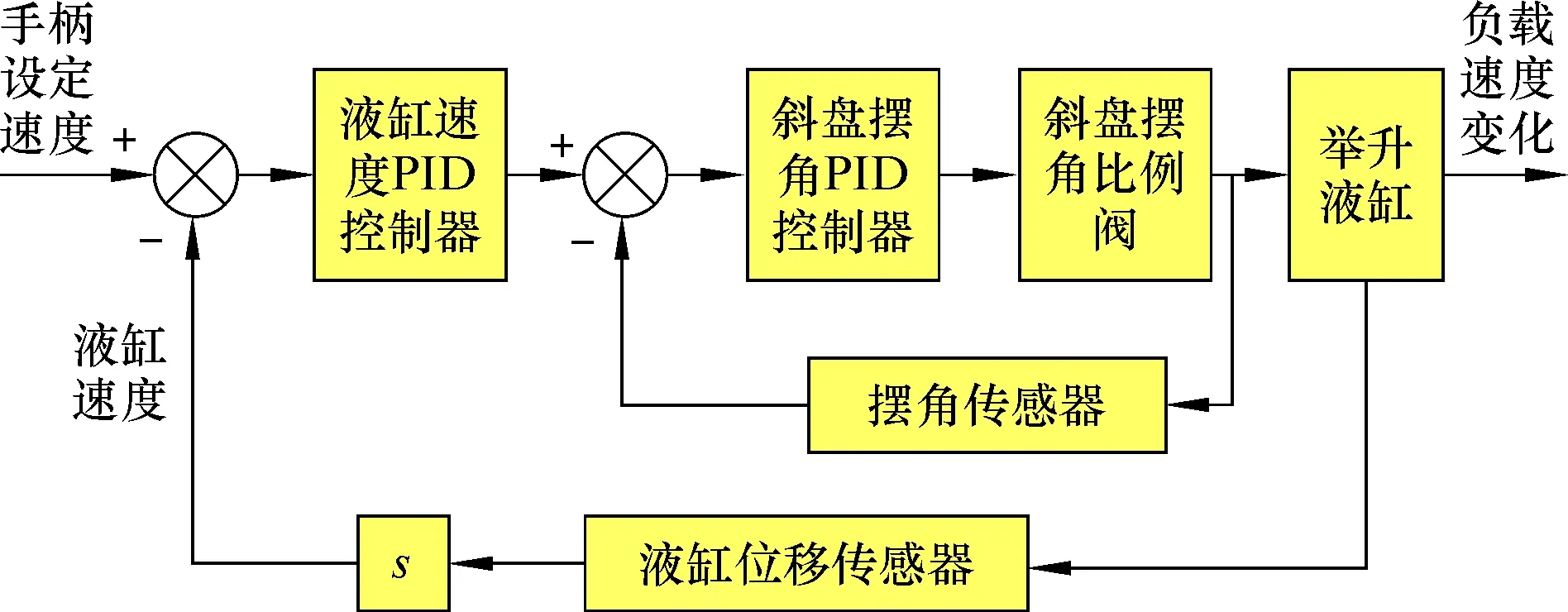
圖2 液缸速度控制流程圖Fig.2 Flow chart of cylinder speed control
采用內(nèi)外雙重閉環(huán)控制實(shí)現(xiàn)液缸速度的精確調(diào)節(jié),其中外環(huán)為液缸速度環(huán),內(nèi)環(huán)為斜盤擺角環(huán)。當(dāng)控制系統(tǒng)檢測(cè)到司鉆人員的手柄速度信號(hào)后,將其與液缸實(shí)際速度求差,然后代入液缸速度PID控制器進(jìn)行運(yùn)算之后輸出斜盤擺角理論值,并與斜盤擺角的實(shí)際值求差后代入斜盤擺角PID控制器,使斜盤擺角即泵的輸出流量達(dá)到理論值,使提升速度與設(shè)定值保持一致。
2.2 能量回收和釋放流體控制技術(shù)
正常鉆進(jìn)作業(yè)過程中,絕大部分工況為接鉆桿、隔水管以及套管,對(duì)于負(fù)載下放時(shí)的能量進(jìn)行回收并在下一次提升時(shí)進(jìn)行能量釋放,可明顯提高系統(tǒng)運(yùn)行效率。能量回收時(shí),主泵的供油切斷,液缸塞腔和桿腔連通進(jìn)入柱塞缸模式,油路與蓄能器液端相連。負(fù)載下放時(shí)的能量利用蓄能器進(jìn)行回收,當(dāng)需要快速提升負(fù)載時(shí),液缸進(jìn)入雙作用模式,利用蓄能器和主泵同時(shí)提供的流量,實(shí)現(xiàn)速度的最快提升。能量回收和釋放的控制流程分別如圖3和圖4所示。

圖3 能量回收速度控制流程圖Fig.3 Flow chart of energy recovery speed control

圖4 能量釋放速度控制流程圖Fig.4 Flow chart of energy release speed control
如圖3所示,利用調(diào)速閥的節(jié)流控制實(shí)現(xiàn)液缸下放速度的調(diào)節(jié),當(dāng)系統(tǒng)檢測(cè)到手柄速度信號(hào)后,將其與液缸實(shí)際速度求差,并將其差值代入調(diào)速閥流量PID控制器,控制調(diào)速閥開度,使液缸的下放速度即負(fù)載速度與設(shè)定值保持一致。引入壓差PID參數(shù)修正,可有效減小蓄能器和液缸兩端的壓力差對(duì)控制穩(wěn)定性的影響。
同理,如圖4所示,利用調(diào)速閥的節(jié)流控制和泵的排量控制共同實(shí)現(xiàn)液缸提升速度的閉環(huán)調(diào)節(jié)。當(dāng)控制系統(tǒng)檢測(cè)到手柄速度信號(hào)后,將其與液缸實(shí)際速度求差,系統(tǒng)對(duì)提升所需的流量進(jìn)行自動(dòng)分配,并計(jì)算出蓄能器和主泵各自應(yīng)供應(yīng)的流量,然后將差值代入各自的調(diào)速閥及斜盤擺角PID控制器進(jìn)行閉環(huán)運(yùn)算,這樣可使蓄能器和主泵的輸出流量滿足設(shè)定值,液缸的提升速度即負(fù)載速度與設(shè)定值保持一致。與能量回收模式一致,蓄能器流量控制環(huán)節(jié)也應(yīng)引入壓差PID參數(shù)修正。
2.3 鉆柱補(bǔ)償功能集成技術(shù)
舉升系統(tǒng)可在不依賴外部鉆柱補(bǔ)償裝置的前提下實(shí)現(xiàn)主動(dòng)、被動(dòng)和半主動(dòng)等三種類型的鉆柱補(bǔ)償功能[10-13]。
主動(dòng)鉆柱補(bǔ)償功能:將船舶的升沉速度信號(hào)作為輸入,通過調(diào)節(jié)閉式泵的擺角控制其輸出流量,實(shí)現(xiàn)液缸速度的閉環(huán)控制。井底鉆壓隨著手柄的設(shè)定值持續(xù)增大且在一定范圍內(nèi)波動(dòng),同時(shí)由于鉆桿的彈性壓縮,液缸也將逐漸回縮,手柄角度僅用于控制鉆壓增大的速度。鉆壓達(dá)到設(shè)定值后開始鉆進(jìn),隨著鉆頭的破巖,鉆壓逐漸降低,此時(shí)應(yīng)緩慢控制手柄,使鉆頭對(duì)井底保持穩(wěn)定的鉆壓,實(shí)現(xiàn)持續(xù)鉆進(jìn)。
被動(dòng)鉆柱補(bǔ)償功能:液缸塞腔與蓄能器液端直接連接,主泵為液缸桿腔提供補(bǔ)油,由于蓄能器和氣瓶的共同作用,液缸隨著船舶的升沉被動(dòng)跟隨,井底鉆壓保持相對(duì)恒定。當(dāng)需要鉆進(jìn)時(shí),利用主泵全排量為液缸桿腔油路供油,通過司鉆手柄控制桿腔油路上的溢流閥調(diào)節(jié)液缸桿腔壓力,從而實(shí)現(xiàn)井底鉆壓的調(diào)節(jié),同時(shí)液缸也回縮至特定位置。井底鉆壓由手柄角度直接決定,且在一定范圍內(nèi)波動(dòng)。當(dāng)鉆壓滿足要求時(shí),手柄保持在當(dāng)前位置,鉆頭破巖時(shí)應(yīng)緩慢控制手柄,使鉆頭對(duì)井底保持穩(wěn)定的鉆壓,實(shí)現(xiàn)持續(xù)鉆進(jìn)。
半主動(dòng)鉆柱補(bǔ)償功能:結(jié)合了主動(dòng)補(bǔ)償和被動(dòng)補(bǔ)償?shù)膬?yōu)點(diǎn),在被動(dòng)補(bǔ)償功能開啟的前提下,液缸桿腔與主泵的低壓側(cè)連通,同時(shí)桿腔油路壓力溢流閥調(diào)整至最大值。由于蓄能器承擔(dān)絕大多數(shù)負(fù)載,半主動(dòng)補(bǔ)償僅控制主泵低壓側(cè)的輸出流量,主動(dòng)調(diào)節(jié)液缸桿腔的壓力,進(jìn)而克服摩擦和負(fù)載慣性實(shí)現(xiàn)船舶運(yùn)動(dòng)的主動(dòng)跟隨,達(dá)到鉆壓保持恒定的目的。與主動(dòng)補(bǔ)償一樣,當(dāng)需要鉆進(jìn)時(shí),井底鉆壓隨著手柄的角度設(shè)定值持續(xù)增大且在一定范圍內(nèi)波動(dòng),液缸也將逐漸回縮,手柄角度僅用于控制鉆壓增大的速度,直到鉆壓滿足鉆頭破巖需求時(shí),手柄角度回到0。鉆頭破巖過程中應(yīng)緩慢控制手柄,以維持穩(wěn)定的鉆壓持續(xù)鉆進(jìn)。
3 仿真分析
在AMEsim平臺(tái)中搭建閉式液缸舉升系統(tǒng)仿真模型(見圖5),結(jié)合實(shí)際作業(yè)工況對(duì)三項(xiàng)關(guān)鍵技術(shù)進(jìn)行仿真分析。
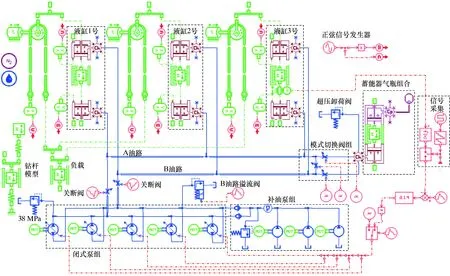
圖5 閉式液缸舉升系統(tǒng)AMESim仿真模型Fig.5 AMESim simulation model of closed cylinder lifting system
為簡(jiǎn)化模型,省去了泵擺角閉環(huán)控制環(huán)節(jié),并用節(jié)流閥來進(jìn)行油路的關(guān)斷和速度控制。在正常提升下放、能量回收和釋放模式下,負(fù)載用質(zhì)量塊代替。在鉆柱補(bǔ)償模式下,負(fù)載用鉆桿模型來模擬鉆桿的真實(shí)運(yùn)動(dòng)情況,鉆桿模型參考瑞利法則,考慮彈簧質(zhì)量對(duì)固有頻率的影響,將彈性鉆柱總質(zhì)量的作為等效質(zhì)量作用在鉆柱的最底部。將鉆柱、頂驅(qū)和大鉤等游動(dòng)部分設(shè)備的質(zhì)量用一集中質(zhì)量替代[14-16]。閉式液缸舉升系統(tǒng)仿真模型部分參數(shù)如表1所示。

表1 閉式液缸舉升系統(tǒng)仿真參數(shù)Table 1 Simulation parameters of closed cylinder lifting system
3.1 提升及下放分析
下放和回收隔水管串、安裝和拆卸鉆柱是液缸舉升系統(tǒng)的主要功能。在圖5所示仿真模型的基礎(chǔ)上,將隔水管(質(zhì)量850 t)和鉆桿(質(zhì)量380 t)的負(fù)載數(shù)據(jù)分別帶入質(zhì)量塊參數(shù)中,以圖6所示的手柄信號(hào)為輸入(正為提升,負(fù)為下放),運(yùn)動(dòng)過程中不考慮海水的阻力,以質(zhì)量塊的運(yùn)動(dòng)作為負(fù)載的運(yùn)動(dòng),仿真得到隔水管串和鉆柱在提升和下放時(shí)的速度和位移情況,分別如圖6和圖7所示。由圖6和圖7可以看出:在手柄未給出信號(hào)時(shí),負(fù)載處于高頻振動(dòng)狀態(tài),且振動(dòng)速度逐漸變小;當(dāng)手柄給定信號(hào)發(fā)生突變時(shí),液缸速度曲線在振動(dòng)一段時(shí)間之后達(dá)到手柄的設(shè)定值。這由液壓油的壓縮、舉升鋼絲繩的彈性以及負(fù)載的慣性導(dǎo)致。閉式液缸舉升系統(tǒng)及其速度控制算法可實(shí)現(xiàn)不同負(fù)載的提升和下降,其原理合理且速度控制精準(zhǔn)穩(wěn)定。

圖6 提升和下放不同負(fù)載時(shí)速度跟隨情況Fig.6 Speed following when lifting and landing different loads

圖7 提升和下放不同負(fù)載時(shí)負(fù)載位移情況Fig.7 Load displacement when lifting and landing different loads
3.2 能量回收和釋放分析
在該模式下接隔水管和鉆柱的操作流程為:下放時(shí)開啟能量回收,舉升系統(tǒng)下放整個(gè)隔水管串或鉆柱至鉆臺(tái)面;提升時(shí)開啟能量釋放,舉升系統(tǒng)提升隔水管和鉆桿至一定高度,完成接單根作業(yè);接隔水管時(shí),為保證其最大載荷,采用3只液缸工作;接鉆桿時(shí),為獲得最大工作速度,采用兩只液缸工作。隔水管單根帶浮力塊干質(zhì)量為24.5 t,長(zhǎng)度為22.86 m。4單根鉆柱總質(zhì)量為1.46 t,長(zhǎng)度為38.4 m。氣瓶預(yù)充7 MPa氮?dú)猓詧D8所示的手柄信號(hào)為輸入,在第10 s進(jìn)入柱塞缸模式,第16 s之后手柄開始給信號(hào),分析負(fù)載位移和速度等情況,結(jié)果如圖8、圖9和圖10所示。

圖8 能量回收和釋放工況下負(fù)載速度情況Fig.8 Load speed under energy recovery and release conditions

圖9 能量回收和釋放工況下負(fù)載位移情況Fig.9 Load displacement under energy recovery and release conditions

圖10 能量回收和釋放工況下蓄能器活塞位移情況Fig.10 Accumulator piston displacement under energy recovery and release conditions
從圖8~圖10可以看出:在下放隔水管串和鉆柱時(shí),下放勢(shì)能一部分存儲(chǔ)在蓄能器中,提升時(shí)蓄能器能量釋放可提高提升速度,兩種操作模式下均可實(shí)現(xiàn)0.70 m/s的下放速度以及0.65 m/s的提升速度;隔水管操作的提升行程為25.7 m,鉆柱操作的提升行程為46 m,如果下放勢(shì)能使蓄能器存儲(chǔ)更多的能量,則釋放時(shí)提升的行程將會(huì)更長(zhǎng);由于單次下放后的有效提升行程均大于隔水管和鉆桿長(zhǎng)度,比僅依靠泵供油進(jìn)行提升,蓄能器的加入可大幅提高提升速度,故在該模式下可顯著提升接隔水管和鉆桿的作業(yè)效率。
3.3 鉆柱補(bǔ)償功能分析
考慮到鉆柱補(bǔ)償?shù)妮d荷和速度需求,以兩只舉升液缸作為鉆柱補(bǔ)償?shù)墓ぷ饕焊住R罁?jù)2.3節(jié)所述,采用速度閉環(huán)控制方式,對(duì)三種鉆柱補(bǔ)償形式進(jìn)行仿真,分析其大鉤運(yùn)動(dòng)及鉆桿井底鉆壓情況,其中以鉆桿等效質(zhì)量塊的運(yùn)動(dòng)作為大鉤運(yùn)動(dòng),以等效質(zhì)量塊底部彈簧作用力作為鉆桿井底鉆壓。利用手柄信號(hào)來進(jìn)行鉆進(jìn)和鉆壓的控制,手柄信號(hào)為無量綱數(shù)值,如圖11所示。
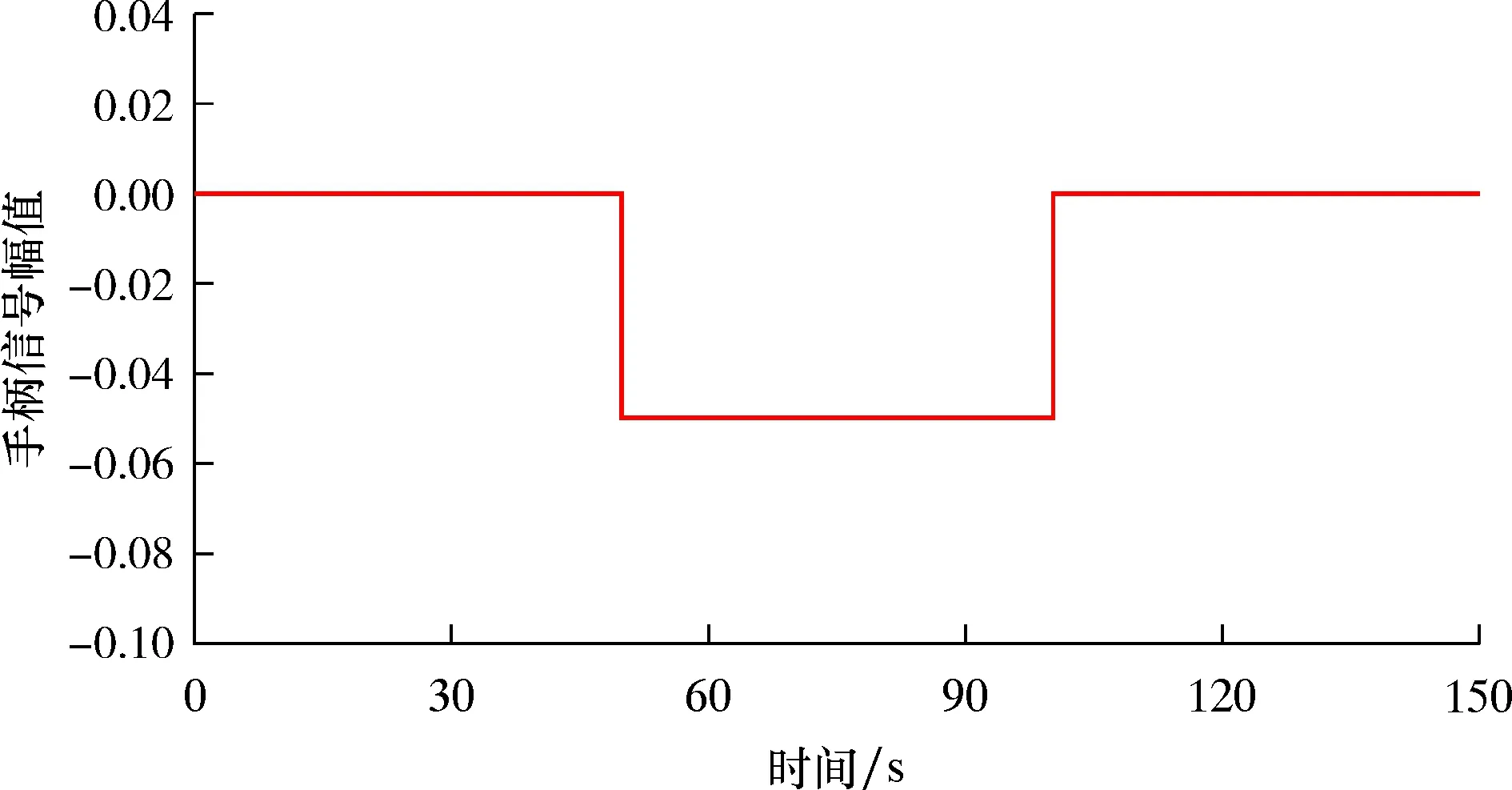
圖11 鉆柱補(bǔ)償模式手柄信號(hào)Fig.11 Handle signal in drill string compensation mode
3.3.1 主動(dòng)鉆柱補(bǔ)償
設(shè)液缸舉升系統(tǒng)在0~25 s內(nèi)對(duì)鉆柱不進(jìn)行補(bǔ)償,25 s之后開啟主動(dòng)補(bǔ)償功能,以手柄給定信號(hào)為控制依據(jù),仿真得到大鉤位移及井底鉆壓情況,如圖12所示。由圖11和圖12可以看出:當(dāng)系統(tǒng)未啟用補(bǔ)償時(shí),大鉤位移和鉆壓波動(dòng)非常大,負(fù)鉆壓表明鉆頭與井底發(fā)生脫離,該情況對(duì)鉆井十分不利;當(dāng)主動(dòng)補(bǔ)償在25 s開啟之后,大鉤位移和井底鉆壓的波動(dòng)幅值明顯減小,且還會(huì)發(fā)生脫離;在50~100 s區(qū)間內(nèi),隨著手柄信號(hào)的持續(xù)給定,大鉤位移逐漸減小且伴隨著井底壓力逐漸升高;90 s之后,井底鉆壓為正值,可正常鉆進(jìn);100 s之后大鉤位移和井底壓力將在一個(gè)范圍內(nèi)波動(dòng)。

圖12 主動(dòng)鉆柱補(bǔ)償大鉤位移及井底鉆壓情況Fig.12 Hook displacement and downhole weight on bit in active drill string compensation
3.3.2 被動(dòng)鉆柱補(bǔ)償
由蓄能器承擔(dān)鉆柱重力,利用桿腔端溢流閥調(diào)節(jié)壓力實(shí)現(xiàn)鉆柱補(bǔ)償,同時(shí)維持持續(xù)的鉆進(jìn)且井底鉆壓可調(diào)。設(shè)蓄能器的預(yù)充壓力可以使鉆桿負(fù)載保持平衡且井底鉆壓為正,以手柄給定信號(hào)為控制依據(jù),仿真得到大鉤位移及井底鉆壓情況,如圖13所示。

圖13 被動(dòng)鉆柱補(bǔ)償井底鉆壓情況Fig.13 Downhole weight on bit in passive drill string compensation
由圖11和圖13可以看出:當(dāng)手柄信號(hào)為0時(shí),系統(tǒng)維持著液氣彈簧模式,大鉤位移和鉆壓波動(dòng)非常大;在50~100 s區(qū)間內(nèi),隨著手柄信號(hào)的給定,大鉤位移將減小至2.5 m左右并繼續(xù)做正弦波動(dòng);在100 s之后手柄回0位,大鉤位移和井底壓力將恢復(fù)至初始情況。
3.3.3 半主動(dòng)鉆柱補(bǔ)償
液缸舉升系統(tǒng)在0~25 s內(nèi)使用被動(dòng)補(bǔ)償,在25 s之后開啟半主動(dòng)補(bǔ)償功能,以手柄給定信號(hào)為控制依據(jù),仿真得到大鉤位移及井底鉆壓情況,如圖14所示。由圖11和圖14可以看出,當(dāng)半主動(dòng)補(bǔ)償功能關(guān)閉時(shí),大鉤位移及鉆壓情況均與被動(dòng)補(bǔ)償一致,在25 s開啟半主動(dòng)補(bǔ)償之后,大鉤位移和井底鉆壓的波動(dòng)幅值明顯減小,在50~100 s區(qū)間內(nèi),大鉤位移逐漸減小且伴隨著井底壓力逐漸升高,100 s之后大鉤位移和井底壓力將在一個(gè)范圍內(nèi)波動(dòng)。
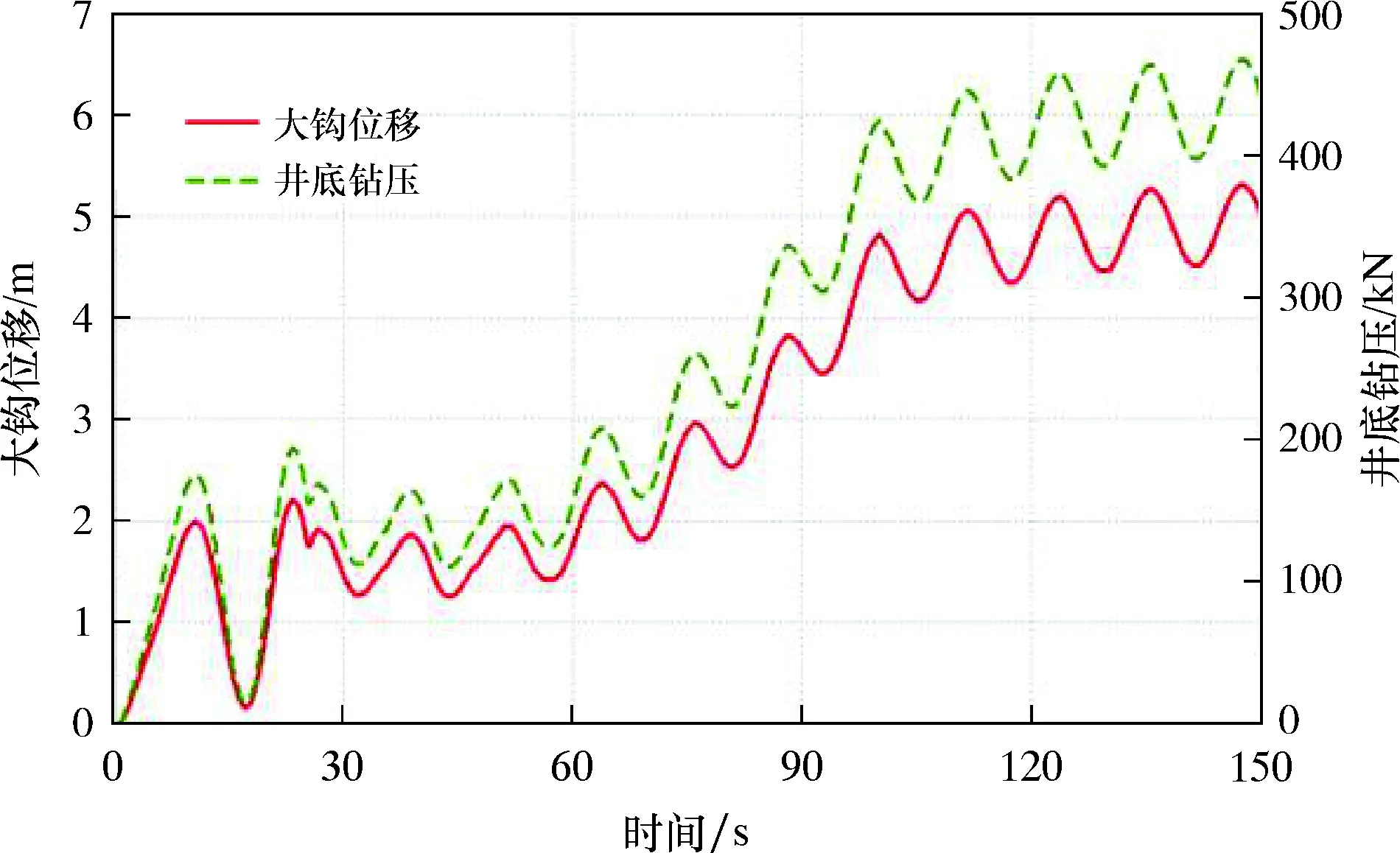
圖14 半主動(dòng)鉆柱補(bǔ)償大鉤位移及井底鉆壓情況Fig.14 Hook displacement and downhole weight on bit in semi-active drill string compensation
3.3.4 海況對(duì)三種補(bǔ)償功能的影響
選取船舶升沉運(yùn)動(dòng)振幅A=0.5、1.0、1.5和2.0 m對(duì)三種補(bǔ)償形式進(jìn)行仿真分析。以井底鉆壓波動(dòng)為補(bǔ)償功能適應(yīng)性評(píng)價(jià)指標(biāo),得到海況對(duì)三種補(bǔ)償功能井底鉆壓波動(dòng)的影響結(jié)果,如表2所示。
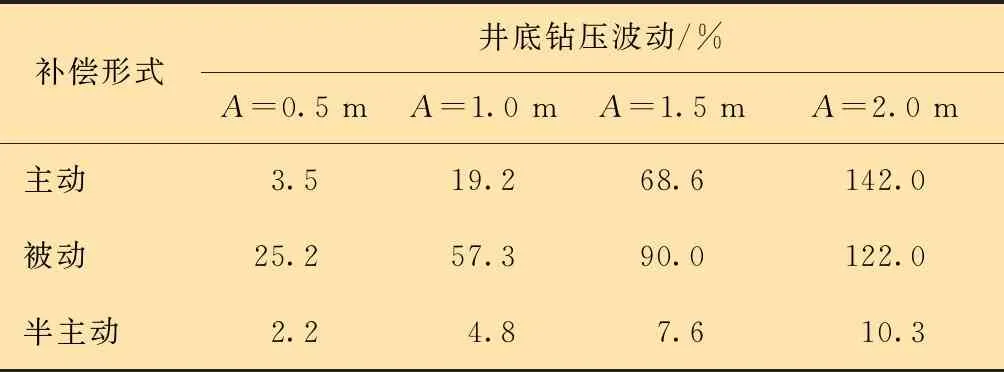
表2 海況對(duì)三種補(bǔ)償功能井底鉆壓波動(dòng)的影響Table 2 Effect of sea state on fluctuation of downhole weight on bit in 3 compensation functions
由表2數(shù)據(jù)可知:在船舶升沉運(yùn)動(dòng)幅值為0.5 m的海況下,主動(dòng)和半主動(dòng)補(bǔ)償鉆柱的井底鉆壓波動(dòng)比被動(dòng)補(bǔ)償有明顯優(yōu)勢(shì);隨著升沉運(yùn)動(dòng)幅值的增加,三種形式的鉆柱補(bǔ)償井底鉆壓波動(dòng)均提高,其中被動(dòng)補(bǔ)償?shù)暮r適應(yīng)性最差,其在1.5 m升沉幅值時(shí)鉆壓波動(dòng)就達(dá)到了90%,該情況是由于被動(dòng)補(bǔ)償?shù)墓逃袑傩?氣瓶容積、管線阻力和摩擦等)導(dǎo)致其對(duì)慣性負(fù)載運(yùn)動(dòng)滯后性無法進(jìn)行有效克服;主動(dòng)鉆柱補(bǔ)償在1.0 m之后鉆壓波動(dòng)急劇增大,其原因是船舶的升沉速度超過了舉升系統(tǒng)最大供給流量下的運(yùn)動(dòng)速度,無法進(jìn)行有效地跟隨;半主動(dòng)補(bǔ)償在最惡劣海況下井底鉆壓波動(dòng)還能達(dá)到10.3%,且在所有海況下的井底鉆壓波動(dòng)均優(yōu)于其余兩種形式的鉆柱補(bǔ)償,其海況適應(yīng)性最佳。
4 結(jié)論和建議
(1)提出了一種新型閉式液缸舉升系統(tǒng)原理以及關(guān)鍵技術(shù)實(shí)施方法。仿真分析結(jié)果表明:閉式液缸舉升系統(tǒng)負(fù)載提升和下放平穩(wěn)、速度控制精度較高。隔水管和鉆柱作業(yè)時(shí)能量回收和釋放可有效的增加提升和下放速度,提高作業(yè)效率。閉式液缸舉升系統(tǒng)自身可實(shí)現(xiàn)三種形式的鉆柱補(bǔ)償。
(2)三種鉆柱補(bǔ)償功能對(duì)海況適應(yīng)性不盡相同,應(yīng)根據(jù)現(xiàn)場(chǎng)的具體情況(海況、能耗和氣瓶壓力等)來開啟不同的補(bǔ)償功能。對(duì)于較好的海況,采用主動(dòng)補(bǔ)償和被動(dòng)補(bǔ)償可實(shí)現(xiàn)鉆壓精度要求不高的穩(wěn)定鉆進(jìn)。對(duì)于惡劣海況和高精度鉆井場(chǎng)合,必須使用半主動(dòng)補(bǔ)償來確保井底鉆壓的穩(wěn)定。
(3)建議下一步開展閉式液缸舉升系統(tǒng)的國(guó)產(chǎn)化攻關(guān)和控制技術(shù)的深入研究,為后續(xù)的設(shè)計(jì)優(yōu)化和實(shí)船應(yīng)用理論研究提供指導(dǎo)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
