北斗/超寬帶組合定位的室內外過渡區無縫鏈接方法
2021-08-07 05:48:54蔡逸豪王潛心朱美國陳臣胡永峰
全球定位系統 2021年3期
關鍵詞:區域
蔡逸豪,王潛心,朱美國,陳臣,胡永峰
(中國礦業大學 環境與測繪學院,江蘇 徐州 221116)
0 引 言
對于室外空曠區域,BDS/GNSS 通過采用偽距單點定位,精密單點實時動態定位(PPP-RTK)等定位技術,已經可以滿足人、無人車、機器人等不同用戶的定位精度需求.在室內環境下,也研發了偽衛星、超寬帶(UWB)等高精度的室內定位系統,蘋果和華為等智能手機開始植入UWB 芯片.因此,隨著我國北斗全球定位系統(BDS)的全面組網[1],BDS/UWB組合的室內外定位系統將迎來新一輪的發展.目前,針對UWB 室內定位和全球衛星導航系統(GNSS)室外定位已有很多孤立性研究,但針對室內外過渡區域,如何解決定位“盲區”并無縫鏈接室內外定位的研究甚少,因此,如何通過過渡區域將室內外定位系統無縫鏈接已成為室內外位置服務亟待解決的難題.針對這一難題,國內一些學者從過渡方法、定位優化等方面進行了研究,蔡勁等[2]提出GNSS/地磁組合的室內外無縫定位平滑過渡方法,與單純的 GNSS 或地磁方法定位的精度相比,分別提高85.7%和82.6%;胡權等[3]提出了一種UWB/GPS 組合定位方案,驗證了在室外環境下可顯著提高定位精度;李玉峰等[4]提出了一種變權重k最鄰近的室內外無縫定位算法,該算法通過權值調整使定位數據更加平滑;胡超等[5]建立了一種基于精度因子(DOP)值的GNSS 超快速觀測軌道精化模型,該模型可用于室內UWB 優化布局;龐艷等[6]提出一種時間平均的改進算法,可使室內UWB 定位精度由傳統算法的1.1 m 提高到0.2~0.6 m;Zhang 等[7]對GPS 和UWB 數據進行加權融合,使定位精度提高了64%;國外學者對UWB 及UWB+GPS 進行了研究,Paul 等[8]和Rhea 等[9]分析了UWB 的測距精度,得出室外空曠環境下測距精度可達3 cm;Gleen 等[10]在城市環境下利用GPS/UWB緊組合分析得出其定位精度可達dm 級.
本文基于北斗三號(BDS-3)/UWB 組合,研究室內外和過渡區域完全統一的組合定位原理、室內信標絕對位置確定方法和室內信標優化布局方法.
1 GNSS/UWB 組合定位原理
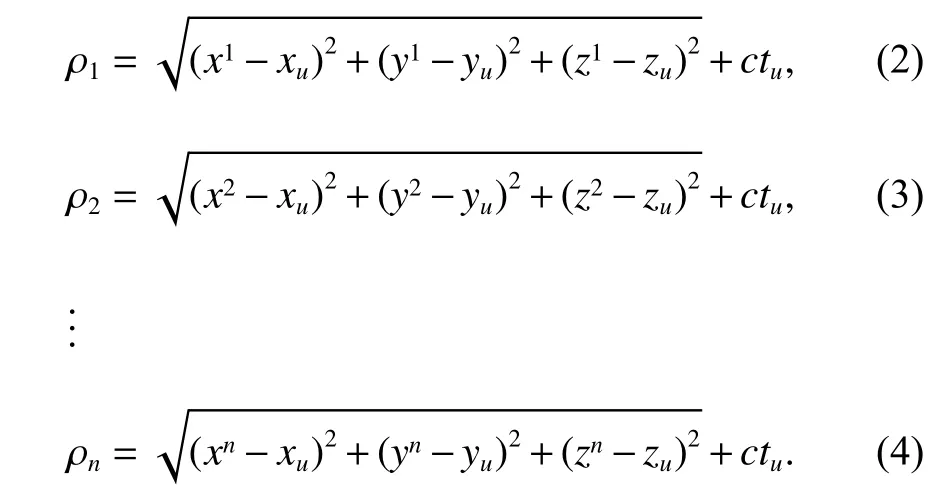
GNSS 和UWB 都是測距定位系統,衛星位置可以通過衛星廣播星歷解算或直接利用精密星歷得到,可以認為是已知的,部署UWB 基站一般采用相對位置,這種相對位置可以通過基線的旋轉轉化為地心地固坐標系(ECEF)[11],本文假設UWB 基站的坐標是ECEF 下的坐標.這樣,無論是衛星還是UWB 均可以采用GNSS 偽距單點定位方程[12]

式中:ρj為偽距;tu為接收機的鐘差;衛星或UWB 信標位置參數為sj(xj,yj,zj);用戶u(xu,yu,zu);其中j的范圍1~n(n≥4),n為可視衛星顆數和UWB 可視信號源總數.由此可知:
與真實位置的定位誤差 (Δxu,Δyu,Δzu),定時誤差Δtu,可以利用BDS/GNSS 和UWB 的測距誤差將上述方程線性化:
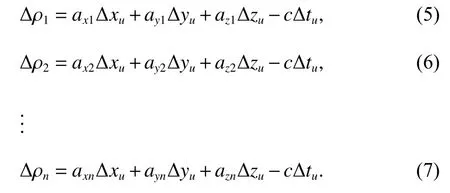
這些方程可以利用下列定義寫成矩陣形式:
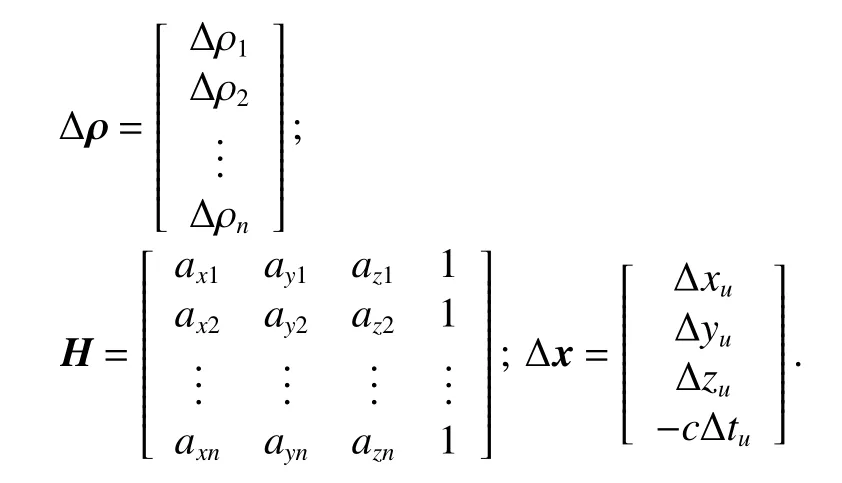
最后得到

這是一個超定或者正定方程,當n=4 時,其定位解為

當n>4 時,可以得到最小二乘解為

由于各個衛星以及各個UWB 之間的等效距離誤差(UERE)往往不是獨立同分布的.上述位置估計的最小二乘解不是最優的,此時可以引入加權最小二乘(WLS),得到最優解

式中,R為權值矩陣,每顆GNSS 可視衛星和UWB信號源的定權規則是根據UERE 的貢獻大小.在過渡區域,GNSS 衛星和UWB 信號同時存在.其中,UWB的測距精度比GNSS 偽距觀測值精度更高[9],因此,可以采用噪聲方差的自適應權重因子,其單個UWB的權重大于GNSS/BDS 組合衛星的權重,各個UWB和BDS 衛星的自適應權重因子根據自身噪聲方差確定,各自存在微小差異.
2 基于空間直線內引法和外引法的UWB信標絕對坐標確定
對于室內定位,當前普遍采用局域相對坐標系進行室內定位.UWB 等各種信標通過一個參考點確定其相對位置,進而用戶獲得相對坐標.對于室內外一體化普適定位,這種相對定位結果遠沒有室外GNSS絕對定位結果應用方便.因此,本文在國際上首次提出基于空間直線內引法和外引法的室內UWB 信標絕對坐標確定.UWB 信標部署方案及內引法和外引法示意圖,如圖1 所示.
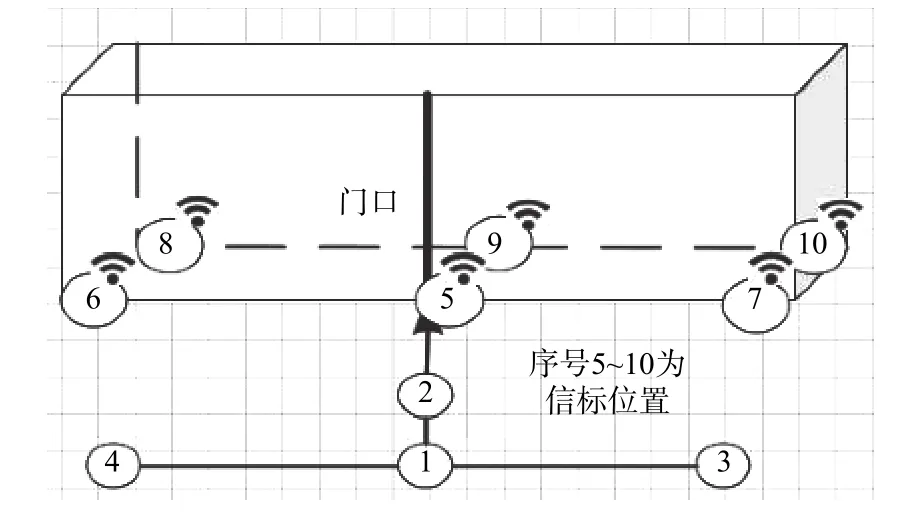
圖1 內引法和外引法示意圖
2.1 空間直線內引法
空間直線內引法:通過兩個已知點構成一條空間直線,將這種已知直線內引到室內過渡區入口和室內,快速確定該空間直線上各個UWB 信標的絕對位置.
假設室內按圖1 部署了UWB 信標,基于激光測距和激光準直原理將室內UWB 信標位置與室外參考位置通過空間直線方程關聯,室外已知參考點位精密確定方法一般可以通過GNSS 精密定位技術,如網絡RTK、RT-PPP 和千尋位置發布的國家地基增強系統.
由圖1 可知,序號5~10 為UWB 部署位置;序號9 和5 兩點在一條直線上,序號8、9、10 三點在一條直線上,序號5、6、7 三點在同一直線上,將序號5 和9 兩點所在直線延伸到室外,利用GNSS 精密定位方法獲得直線上序號1 和2 兩點在ECEF 上的絕對位置 (x1,y1,z1) 和 (x2,y2,z2),在通過上述的激光測距測出序號2 和5 之間的距離l1進而可以根據序號1 和2 確定空間直線方程

此時可得出過渡區域點 5 (x5,y5,z5) 的位置坐標
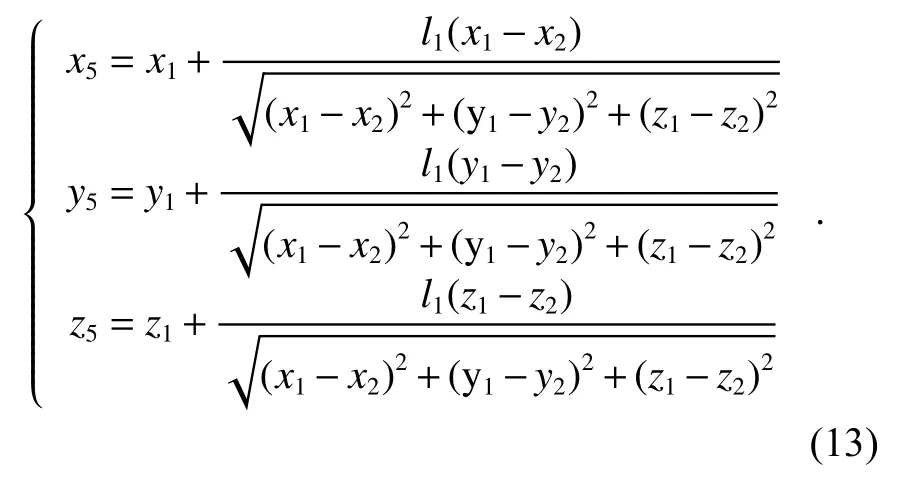
同理可以確定序號9 的絕對坐標 (x9,y9,z9).
2.2 空間直線外引法
空間直線外引法:室內其他點布設的UWB 信標可連接成空間直線,在室外構建與之平行的直線,從而根據空間直線之間的平行關系,快速確定室內UWB信標的絕對位置.
在2.1 節中,通過空間幾何關系已經知道直線l19的空間幾何信息,利用“內引法”內引時的通視性,可以根據“門”的可視寬度將l19沿l34微平移得到l0,從而構成一個新的通視平行四邊形,將平行四邊形的其他兩邊延長得到l56、l89.使用激光測距的方法測出室內相鄰信標的距離,如測定l56、l89的直線距離,如圖2所示.由2.1 節已知序號1~5 之間的直線距離,在室外構建與之平行的直線,例如:l67//l34//l89,從而根據空間直線平行關系,快速確定室內UWB 信標的絕對位置.
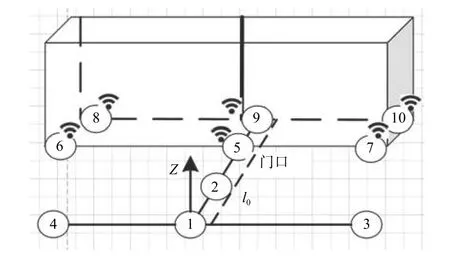
圖2 空間直線外引法示例圖
由于序號5、6、7 所在的直線和序號8、9、10 所在的直線為兩條相互平行的空間直線,并且由BDS RTK 測出點3 的坐標為(x3,y3,z3),點4 的坐標為(x4,y4,z4).
由此可以得出l34的直線坐標

由方向余弦:
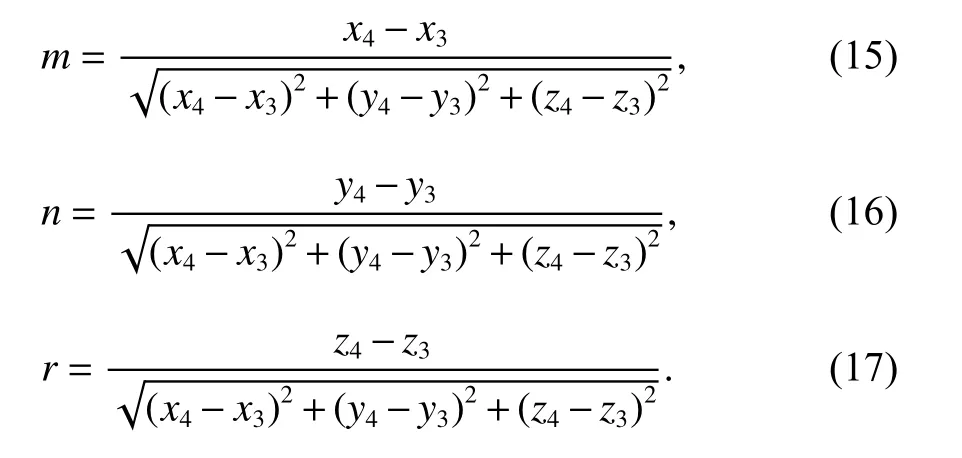
可知平行直線l67和l89直線方程:
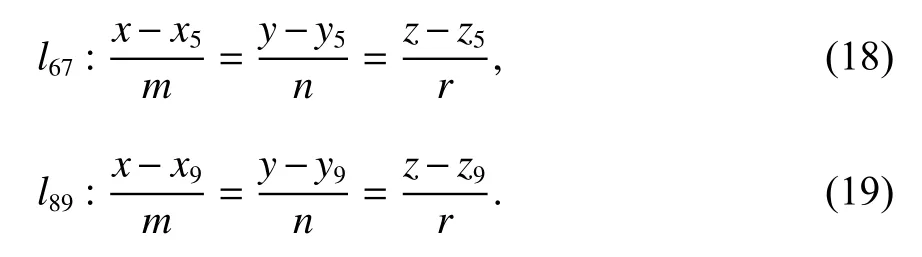
由激光測距測得序號5 和6 兩點之間的距離l2,則可直接得到點6 的絕對坐標

同理可以確定點7、8 和10 的絕對坐標.綜合2.1 節和2.2 節,通過內引法和外引法,可以確定室內任何UWB 信標在ECEF 中的絕對坐標,這就為室內和室外均可以采用GNSS 定位原理奠定了理論基礎.
3 過渡區域BDS 特征分析
當從室外-室內或從室內-室外,均存在一個過渡區域,這個過渡區域不同于空曠區域,也不同于室內封閉區域,主要特征是GNSS 衛星并非完全遮擋,多數情況下,可視衛星數量小于4 顆,導致不能單獨依托GNSS 進行正常定位.因此,對于過渡區域,通常是室外和室內定位兩種方法的融合.在融合之前,本文先開展如下試驗.
實驗一:利用BDS-3 試驗接收機在試驗大樓正門開展從室外-室內和室內-室外的觀測試驗,通過這個試驗分析BDS 可見衛星數量和位置精度因子(PDOP)在過渡區域所呈現的特性.
3.1 過渡區域BDS 可視衛星變化特性
將實驗所觀測到的衛星數量變化情況如圖3、圖4 所示.圖中紅色方框為過渡區域內的可見衛星情況,在空曠區域,BDS-3 接收機可以觀測到的可見衛星數量(包含BDS-2)多達12 顆,從室外-室內時,可見衛星數量從12 顆減少到2 顆,進入室內后減少到0 顆,過渡區域BDS-3 可見衛星數量呈現出迅速減少特性;從室內-室外時,可見衛星數量從0 顆、2 顆、3 顆、6 顆到12 顆的快速變化,可見衛星數量呈現迅速增加特性.
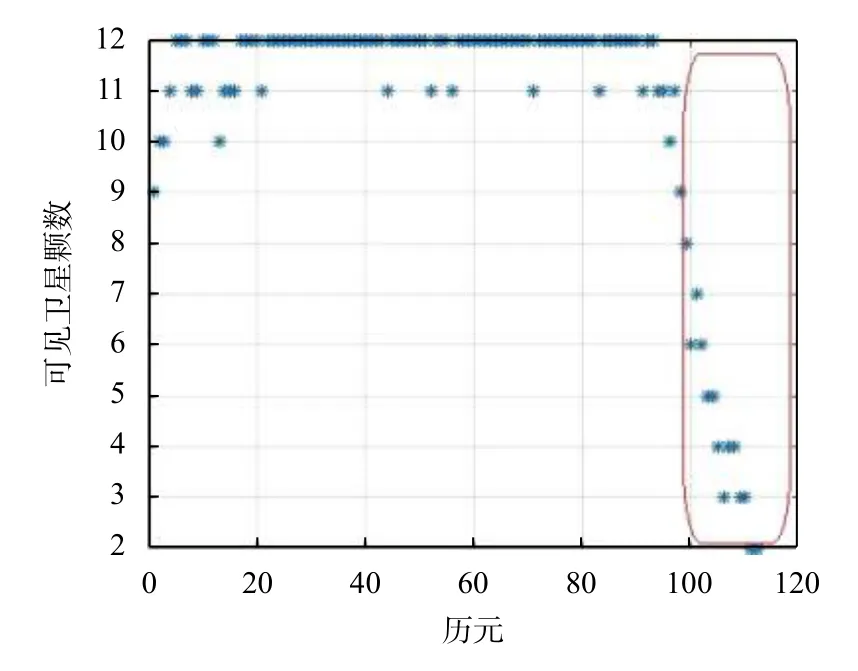
圖3 從室外-室內可見衛星數量變化特性
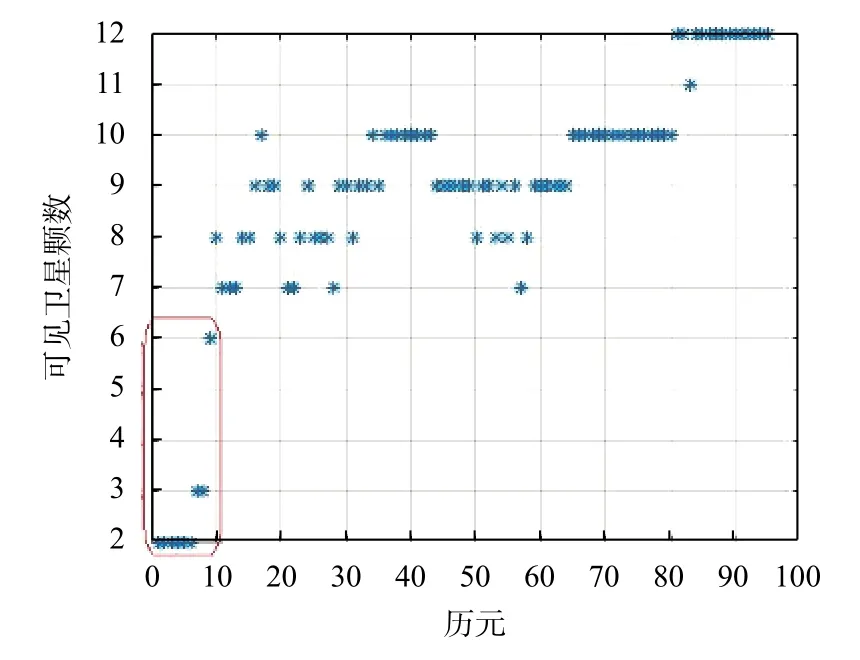
圖4 從室內-室外可見衛星數量變化特性
3.2 過渡區域BDS PDOP 值變化特性
從室外-室內和室內-是室外PDOP 值的變化情況如圖5、圖6 所示,圖中紅色方框表示過渡區域的PDOP 值變化特性.從室外-室內PDOP 值從小于2 迅速增長到超過18;當從室內-室外,PDOP 值從18 以上下降到2 以下.
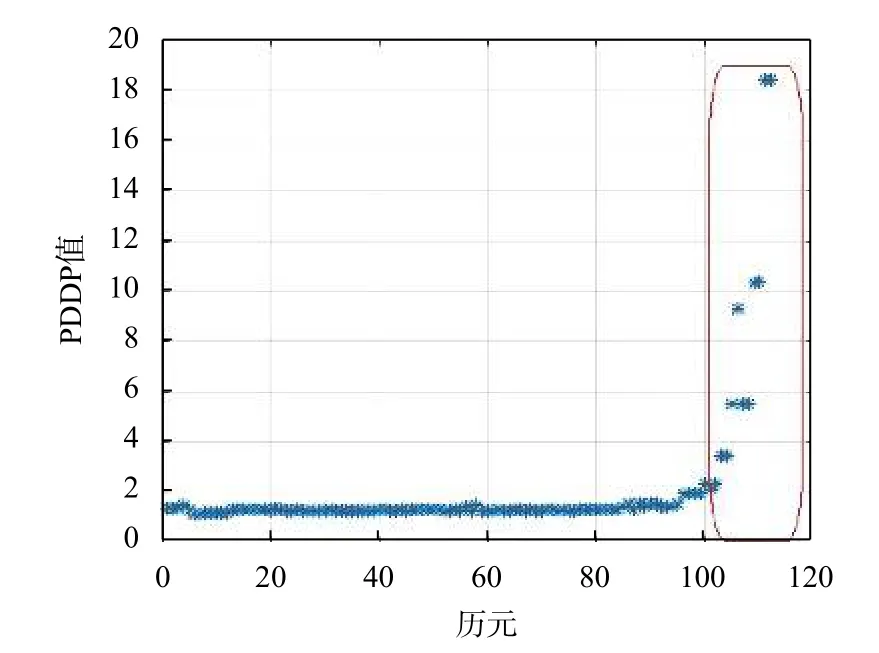
圖5 從室外-室內PDOP 值變化特性
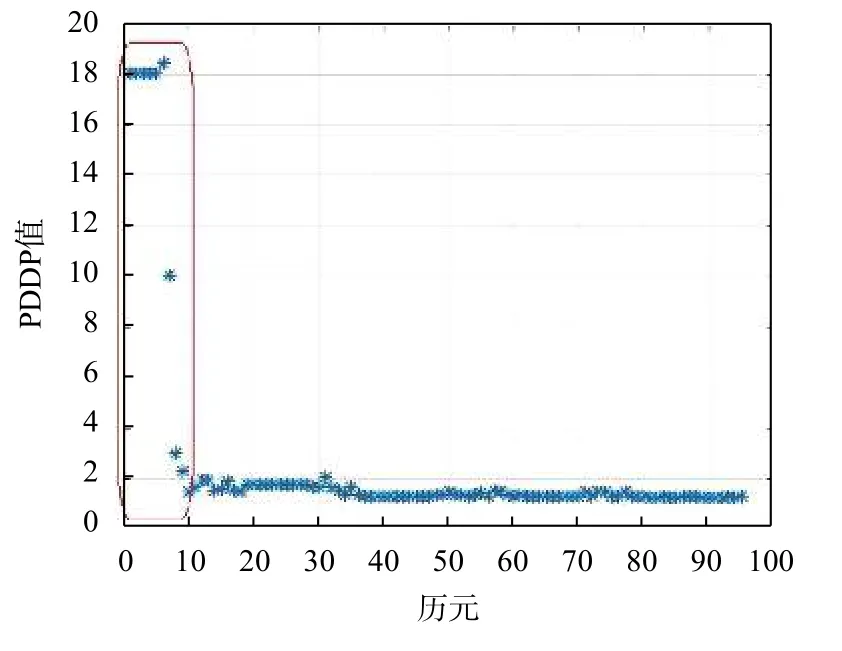
圖6 從室內-室外PDOP 值變化特性
通過上述實驗可以得出:從室外-室內,過渡區域的可見衛星數量快速減少到0,PDOP 值快速增大,根據定位精度=測距誤差×PDOP 值可以進一步得出,定位精度會隨著PDOP 值的劇烈增大而迅速減少;從室內-室外,結論相反,過渡區域的定位精度隨著PDOP 值的劇烈變化而變化.
4 過渡區域UWB 信標星座優化布局
根據上文分析可知,過渡區域衛星數量和PDOP值均具有劇烈變化特性,從而導致定位精度劇烈變化甚至無法定位.要使過渡區域定位精度保持相對平穩,最關鍵的是在過渡區域針對實際情況優化布局UWB 信標,從根本上保證了PDOP 值的平穩性.UWB信標部署需要在室內、室外和過渡區域一體化環境中,針對PDOP 值分布和UWB 信號可達距離等因素進行優化布局,盡可能既可用于室內,也可用于過渡區域,從而使UWB 信標總量最小,但PDOP 值效果較為理想[13].圖4 為本文提出了一種UWB 5 信標優化布局方案,基于該方案開展了如下試驗.
實驗二:在實驗大樓一樓部署5 個UWB 信標,布局方案如圖7、圖8 所示.圖中4 個UWB 信標分別部署在4 個墻角上,一個部署在后墻正直對過渡區域入口這樣,這樣在過渡區域至少有2 個信標可用,聯合BDS,至少可保證有4 個定位源.通過該試驗分析其PDOP 值和定位精度.
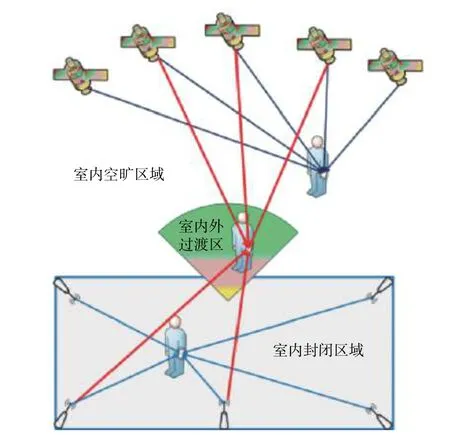
圖7 UWB 信標優化布局方案一
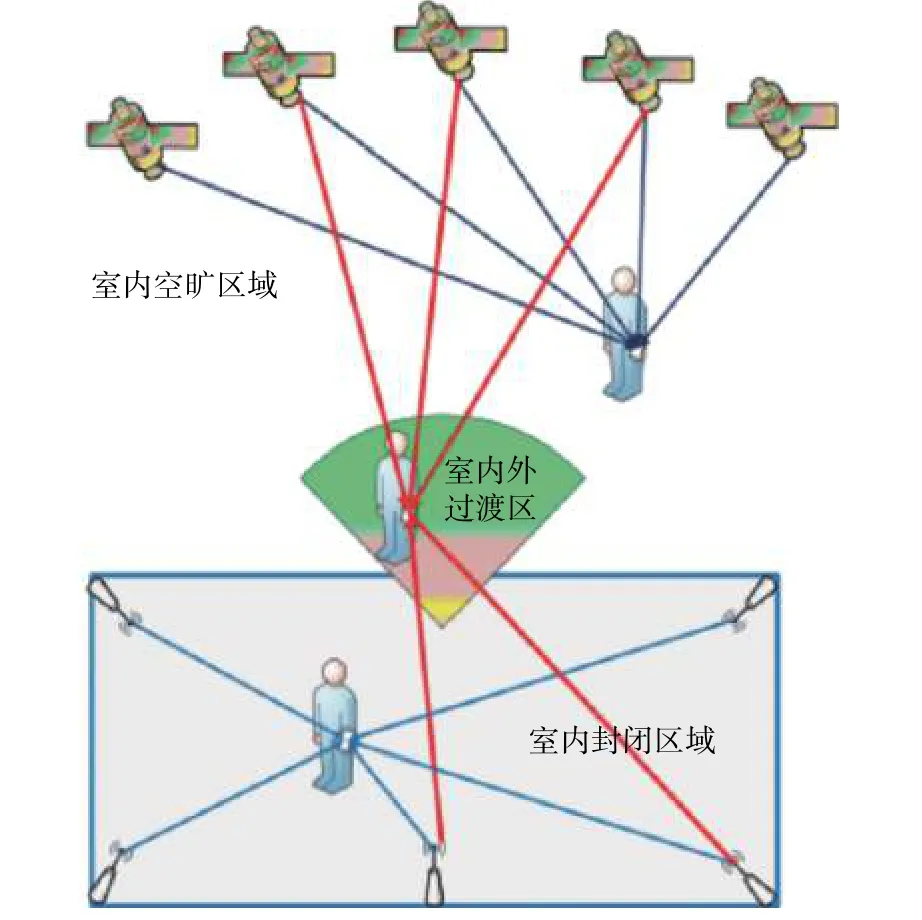
圖8 UWB 信標優化布局方案二
4.1 過渡區域BDS/UWB 的PDOP 值
由圖7、圖8 可知,過渡區域可大致細分為三個區域,實際上都有5 個定位源,BDS 可見衛星+UWB信標分別為:綠色區域為3+2;淺紅色區域為2+3;黃色區域為1+5;灰色區域為0+5,表示室內內完全封閉區域.
部署UWB 信標前后的PDOP 值比較如圖9、圖10 所示,圖9 表示室外到室內,圖10 表示室內-室外,紅框表示過渡區域,紅色表示BDS 的PDOP值,淺藍色表示BDS/UWB 組合的PDOP 值,藍色表示空曠區域BDS 的PDOP 值.綜合圖9、圖10 可以看出,從室內-室外,BDS 的PDOP 值高達18,但BDS/UWB 組合的PDOP 值小于2,過渡區域BDS/UWB組合的PDOP 值略低于室外空曠區域GNSS.這說明,通過UWB 優化布局,能確保過渡區域的PDOP值具有良好的平穩性
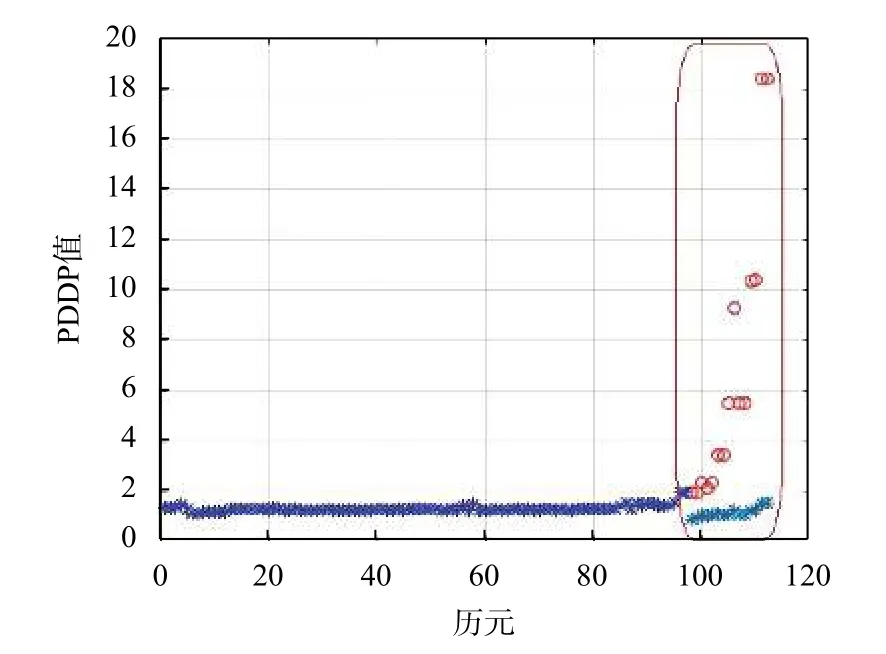
圖9 室外-室內有無UWB 信標的PDOP 值比較
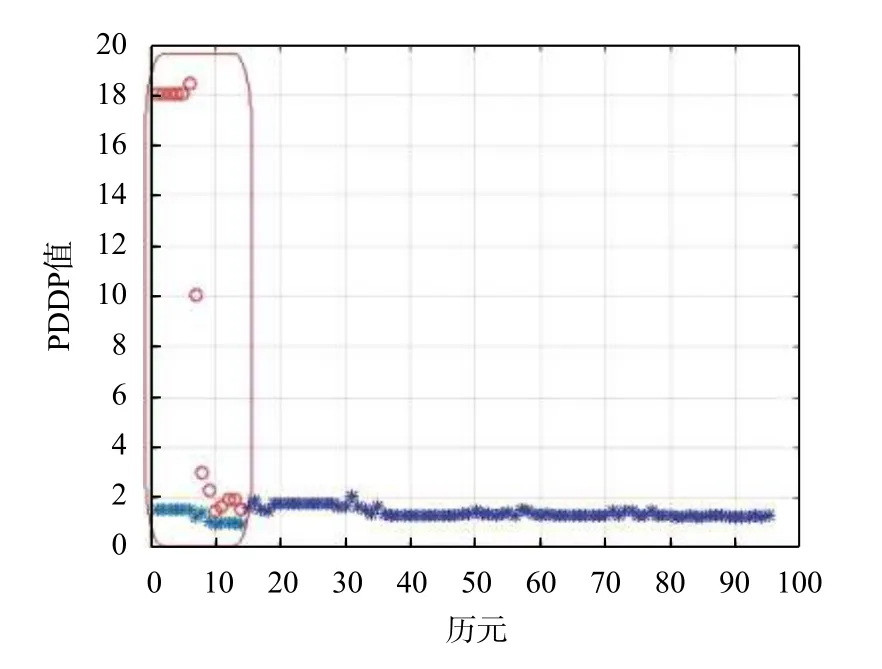
圖10 室內-室外有無UWB 信標的PDOP 值比較
4.2 過渡區域BDS/UWB 的定位精度
部署UWB 信標前后的定位精度比較如圖11、圖12 所示,圖11 表示室內-室外,圖12 表示室外到室內,紅框表示過渡區域,紅色表示BDS 定位精度,淺藍色表示BDS/UWB 組合的定位精度.圖11 中BDS有6 個歷元可定位,其統計結果為14.82 m;BDS/UWB所有歷元均可以定位,其定位精度為1.34 m;空曠區域的BDS 定位精度為1.78 m;部署UEB 信標后,過渡區域的定位精度與沒有部署UWB 信標之前單獨利用BDS 的定位精度改善達到了1 006%;圖12 中BDS-3 有10 個歷元可定位,其統計結果為6.46 m;BDS/UWB 所有歷元均可以定位,其定位精度為1.42 m;空曠區域的BDS-3 定位精度為1.74 m;部署UWB信標后,過渡區域的定位精度與沒有部署UWB 信標之前單獨利用BDS 的定位精度改善超過355%.通過上述實驗分析表明,部署UWB 信標后,過渡區域的定位精度與沒有部署UWB 信標之前單獨利用BDS的定位精度改善超過355%,由此可知定位精度在過渡區域改善效果非常顯著.
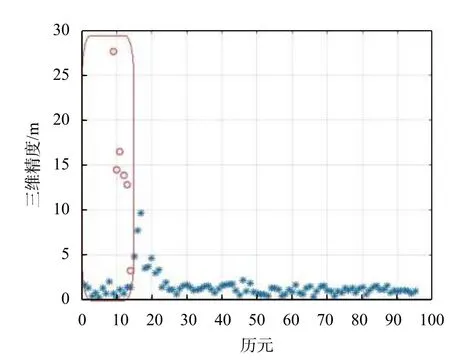
圖11 室內-室外有無UWB 信標的定位精度比較
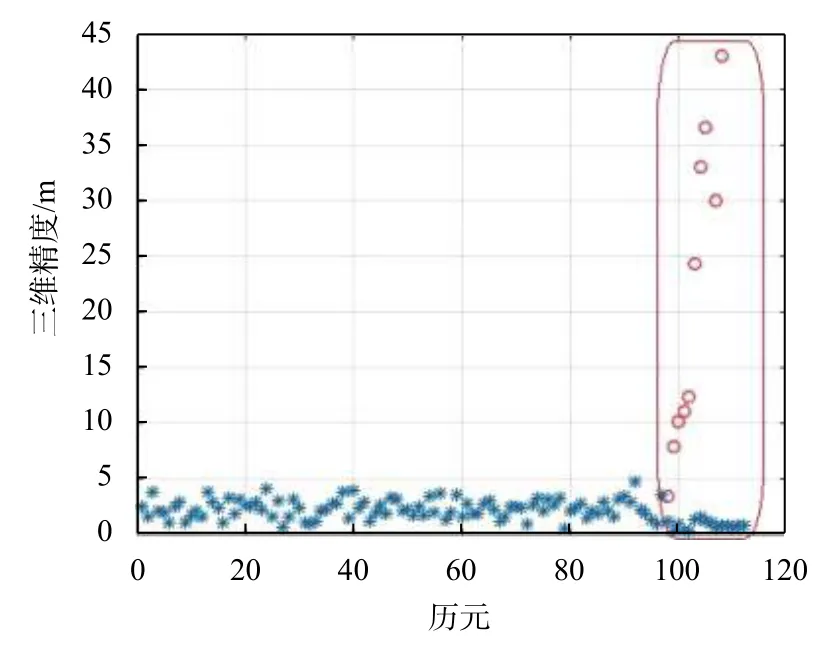
圖12 室外-室內有無UWB 信標的定位精度比較
5 結 論
本文基于UWB 與GNSS 組合方案,重點研究并提出了一套效果非常顯著的室內外過渡區無縫鏈接方法,該方法的主要貢獻在于統一了室內外和過渡區域的定位原理,統一了室內外在ECEF 參考坐標框架下的坐標,這對于室內地圖構建和室內外一體化位置服務具有重要參考價值.通過試驗得出如下主要結論:
1)本文提出的內引法和外引法可以快速精密確定室內任何位置的UWB 信標在ECEF 坐標框架下的絕對坐標;
2)在過渡區域,通過室內UWB 信標優化布局,可以大大改善PDOP 值;
3)在過渡區域,通過BDS/UWB 組合的方差自適應加權定位,與BDS 相比,定位精度提高了3~10 倍.
后續工作將研制室內外一體化定位設備和軟件,為室內外一體化服務及其產業化提供有力支撐.
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15
