藍(lán)牙連接模式對室內(nèi)定位性能的影響*
2021-08-02 08:55:42徐光明相恒永施滸立寧永科錢小龍
電子技術(shù)應(yīng)用 2021年7期
李 芳 ,徐光明 ,劉 成 ,相恒永 ,施滸立 ,江 娟 ,寧永科 ,錢小龍
(1.中國科學(xué)院國家天文臺,北京 100012;2.太原衛(wèi)星發(fā)射中心,山西 太原 030000;3.北京跟蹤與通信技術(shù)研究所,北京 100094;4.中國科學(xué)院微電子研究所,北京 100029;5.北京空間技術(shù)信息研究所,北京 100094;6.桂林電子科技大學(xué) 信息與通信學(xué)院,廣西 桂林 541004)
0 引言
隨著物聯(lián)網(wǎng)和位置大數(shù)據(jù)時(shí)代的來臨,室內(nèi)定位技術(shù)受到廣泛研究和重點(diǎn)關(guān)注,室內(nèi)位置服務(wù)(Location Based Service,LBS)產(chǎn)業(yè)也已迅速規(guī)模化成長。距統(tǒng)計(jì),都市人群80%以上的時(shí)間在室內(nèi)環(huán)境中度過。室內(nèi)LBS可為消費(fèi)者提供商場導(dǎo)購、停車場泊車/尋車、防走失、社交交友、展廳/景區(qū)自主導(dǎo)游等服務(wù),為企業(yè)提供人流監(jiān)控分析、智慧倉儲物流、智能制造、人員資產(chǎn)管理等應(yīng)用,打破線下人與物的邊界,是實(shí)現(xiàn)萬物互聯(lián)的基礎(chǔ)。此外,大量的位置數(shù)據(jù)得以產(chǎn)生和積累,通過數(shù)據(jù)的挖掘和分析,將促進(jìn)行業(yè)效率提升與轉(zhuǎn)型,并帶動(dòng)新型產(chǎn)業(yè)生成[1-2]。
藍(lán)牙無線定位是當(dāng)前室內(nèi)定位技術(shù)中最常用的解決方案之一[3-4],它最早由諾基亞發(fā)起和使用。2013 年,蘋果發(fā)布了基于藍(lán)牙4.0 低功耗(Bluetooth Low Energy,BLE)協(xié)議的iBeacon 協(xié)議[5],主要針對零售業(yè)應(yīng)用,引起了市場的廣泛關(guān)注。同時(shí),由于智能手機(jī)等設(shè)備中開始普遍集成BLE模塊,使得開發(fā)者們能夠直接基于手機(jī)開發(fā)各種場景下的室內(nèi)LBS 應(yīng)用,而人們通過手機(jī)APP即能享受便捷的室內(nèi)LBS 服務(wù),這使得藍(lán)牙室內(nèi)定位方案更具性價(jià)比。然而,BLE 設(shè)備及其協(xié)議仍是通信傳輸為首要設(shè)計(jì)目的,它并非專門為導(dǎo)航定位開發(fā),也不具備衛(wèi)星導(dǎo)航系統(tǒng)信號中的偽隨機(jī)碼精確測距功能[6]。因此,只能通過測量藍(lán)牙信號的接收信號強(qiáng)度指示(Received Signal Strength Indication,RSSI)估算用戶至BLE熱點(diǎn)接入設(shè)備(Access Point,AP)的幾何距離,從而完成定位。
在實(shí)際應(yīng)用中,發(fā)現(xiàn)不同通信連接方式下的BLE 測距性能具有很大差異,從而會顯著影響系統(tǒng)最終定位服務(wù)性能。針對這一關(guān)鍵問題,本文總結(jié)了BLE 設(shè)備的連接模式,并對不同連接模式下的BLE 測距性能進(jìn)行了測試和比較。在此基礎(chǔ)上,利用自行搭載的室內(nèi)定位環(huán)境開展實(shí)驗(yàn),驗(yàn)證和分析了其對用戶實(shí)際定位性能的影響。本文相關(guān)結(jié)論能夠?yàn)槭覂?nèi)BLE 定位系統(tǒng)的開發(fā)和應(yīng)用提供有益參考。
1 藍(lán)牙Beacon 定位方法
1.1 三邊交會方法
三邊交會是導(dǎo)航定位中最常見的數(shù)學(xué)模型,GPS、北斗等衛(wèi)星導(dǎo)航系統(tǒng)是其最具代表性的應(yīng)用。在藍(lán)牙三邊交會定位中,用戶終端通過測量得到周圍最少3 個(gè)Beacon 熱點(diǎn)模塊(對于2 維定位應(yīng)用而言最少為2 個(gè))的RSSI 值,利用信號路徑衰減模型估算自身至各個(gè)Beacon熱點(diǎn)模塊之間的傳輸距離[7]。常用的路徑衰減模型主要有線性模型、經(jīng)典對數(shù)模型等。其中,線性衰減模型假設(shè)信號強(qiáng)度r(d)(單位:dBm)與傳輸距離d(單位:m)之間呈線性分布關(guān)系:

式中,p 為裝置發(fā)射能量(單 位:dBm),α0、α1為衰減系數(shù)。該模型已寫入電氣與電子工程師協(xié)會(Institute of Electrical and Electronic Engineers,IEEE)802.15a 信道模型標(biāo)準(zhǔn)中,適用于短距離傳輸環(huán)境[8]。
對數(shù)模型有時(shí)也稱為陰影模型,它假設(shè)信號在傳輸過程中的信號強(qiáng)度與距離呈對數(shù)變化關(guān)系,適用于大部分的無線局域傳輸環(huán)境。對數(shù)模型接收信號強(qiáng)度r(d)與其對應(yīng)傳輸距離d 之間的關(guān)系也由對數(shù)函數(shù)模型表達(dá)為:

式中,βi(i=0,1)為衰減系數(shù),通常在2~5 之間取值。
通過測量終端P 至多個(gè)Beacon 熱點(diǎn)模塊之間的距離,即能利用三邊交會法構(gòu)造測量方程組并求解得到終端空間坐標(biāo)位置。如圖1 所示,設(shè)三個(gè)Beacon 熱點(diǎn)AP1、AP2、AP3的已知坐標(biāo)分別為(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3),終端P 至節(jié)點(diǎn)的測量距離分別為d1、d2、d3,則可得到距離觀測方程:
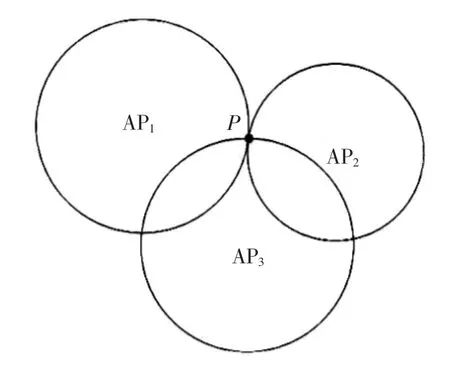
圖1 三邊交會原理示意圖
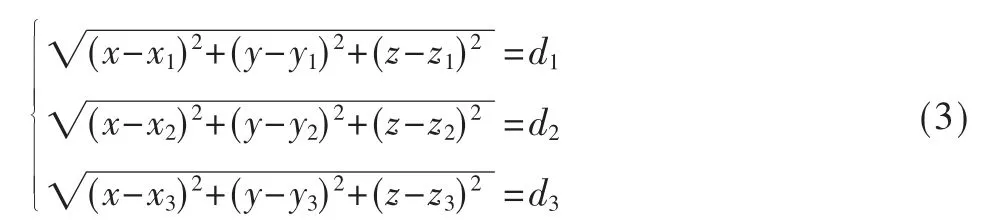
對式(3)進(jìn)行泰勒級數(shù)線性化展開后,即可利用高斯迭代求解得到用戶終端P 的坐標(biāo)位置(x,y,z)。
1.2 位置指紋匹配方法
三邊交會方法原理簡單直觀,但其最大問題在于,受復(fù)雜室內(nèi)環(huán)境下信號遮擋、反射、多徑等影響,利用信號傳輸衰減模型估算用戶至AP 之間的幾何距離容易產(chǎn)生較大誤差[9];此外,采用交會方式進(jìn)行定位,還必須事先測定得到各個(gè)藍(lán)牙模塊在局域坐標(biāo)系下的準(zhǔn)確坐標(biāo)[10],這在實(shí)際應(yīng)用中是不易實(shí)現(xiàn)的。
鑒于上述原因,基于RSSI 的位置指紋匹配方法(Fingerprinting)成為室內(nèi)定位中更為常見與實(shí)用的方法。Fingerprinting 基本原理是定位環(huán)境進(jìn)行抽象和形式化描述,使用環(huán)境中各個(gè)無線傳感器AP 的RSSI 描述位置信息,并通過采集這些RSSI 測量值建立參考位置指紋數(shù)據(jù)庫(Dataset)。用戶在線定位時(shí),將自身實(shí)時(shí)測量得到的RSSI 測量值與位置指紋數(shù)據(jù)庫中的RSSI 參考值匹配,選取出與自身RSSI 測量值具有最佳相似度的若干個(gè)參考點(diǎn),并利用K 鄰近(K-Nearest Neighbor,KNN)、加權(quán)K鄰近(Weight K-Nearest Neighbor,WKNN)等算法估計(jì)自身位置坐標(biāo)[11]。
RSSI Dataset 的預(yù)先采集,一般需要工作人員攜帶裝有專門軟件的設(shè)備或智能手機(jī),以一定的步長遍歷室內(nèi)空間,如圖2 所示。
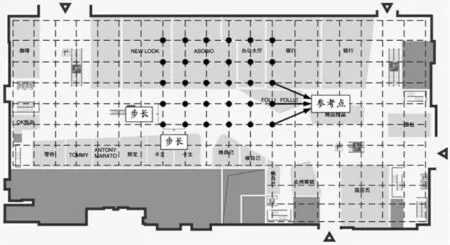
圖2 RSSI Database 的采集與建立
2 BLE 廣播類型與連接模式
BLE模塊布設(shè)并運(yùn)行時(shí),需為其選擇設(shè)置一種廣播類型。BLE 共有四種廣播類型,分別是:可連接非定向廣播(Connectable Undirected Event Type)、可連接定向廣播(Connectable Directed Event Type)、不可連接非定向廣播(Non-connectable Undirected Event Type)以及可掃描非定向廣播(Scannable Undirected Event Type)[12]。
其中,“可連接非定向廣播”類型包括廣播數(shù)據(jù)和掃描響應(yīng)數(shù)據(jù)的功能,它表示當(dāng)前設(shè)備可以接受其他任何設(shè)備的連接請求。“可連接定向廣播”類型是為了盡可能快地建立連接,其廣播報(bào)文中包含了廣播者地址與發(fā)起者地址,發(fā)起者接收到發(fā)送給自己的定向廣播報(bào)文后,可立即響應(yīng)并發(fā)送連接請求。“不可連接非定向廣播”類型僅發(fā)送廣播數(shù)據(jù),不接受連接請求。“可掃描非定向廣播”類型不能發(fā)起連接,但允許其他設(shè)備掃描該廣播設(shè)備;換言之,設(shè)備既可以發(fā)送廣播數(shù)據(jù),也可以響應(yīng)掃描并發(fā)送回應(yīng)數(shù)據(jù),但不能建立連接。四種不同的廣播類型對掃描請求和連接請求的不同響應(yīng)情況見表1 所示。
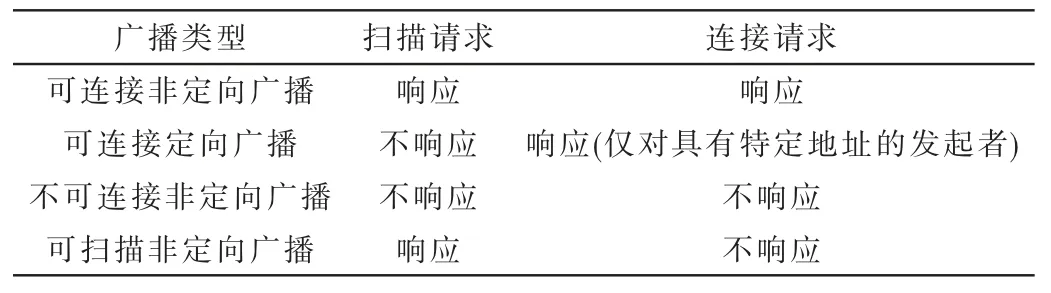
表1 不同廣播類型對掃描請求和連接請求的響應(yīng)
綜上,若僅需定時(shí)傳輸一些固定的簡單數(shù)據(jù),可使用“不可連接非定向”廣播類型,此時(shí)廣播者與接收者之間不進(jìn)行任何額外的數(shù)據(jù)交互。如果除廣播數(shù)據(jù)之外,還有一些額外數(shù)據(jù)需要傳輸,則可使用“可掃描非定向”廣播類型;此時(shí)廣播者在周期性廣播的同時(shí)會監(jiān)聽掃描請求,接收者在收到廣播數(shù)據(jù)之后可以發(fā)送掃描請求并獲得更多數(shù)據(jù)。如果后續(xù)需要建立點(diǎn)對點(diǎn)的連接,則可以使用“可連接非定向”廣播類型;此時(shí)廣播者在周期性廣播的同時(shí)會監(jiān)聽連接請求,接收者在收到廣播數(shù)據(jù)之后可以發(fā)送請求以建立連接。進(jìn)一步地,如果發(fā)起者已知廣播者的地址(如通過掃描方式獲得),則可通過“可連接定向”廣播類型快速建立與廣播者之間的連接。
3 實(shí)驗(yàn)與分析
如上文所述,BLE 具有四種不同廣播類型,具體又可分為“可連接”和“不可連接”兩種模式。當(dāng)BLE 設(shè)備僅用內(nèi)定位時(shí),通常設(shè)置為“不可連接”模式即可,此時(shí)設(shè)備僅需定時(shí)發(fā)送通用唯一識別碼(Universally Unique Identifier,UUID)、媒體存取控制位址(Media Access Control Address,MAC)等基本數(shù) 據(jù)。然而,當(dāng)該BLE 設(shè)備需要同時(shí)用于其他點(diǎn)對點(diǎn)的數(shù)據(jù)傳輸應(yīng)用時(shí),則需要設(shè)置為“可連接模式”。本節(jié)對兩種不同連接模式下的BLE測距性能進(jìn)行測試,進(jìn)而比較和分析其對用戶定位精度的影響。
3.1 測距性能
為分析不同連接模式下的測距性能,對同一個(gè)BLE模塊分別設(shè)置為“可連接模式”與“不可連接模式”并進(jìn)行數(shù)據(jù)廣播(模塊廣播頻率100 ms、發(fā)射功率-59 dBm),并通過APP 分別測量和采集兩種模式下的無線信號RSSI 值。其中,設(shè)備在可連接模式下的測量采集結(jié)果如圖3 所示,在不可連接模式下的測量采集結(jié)果如圖4所示。
從圖3 和圖4 可以看出,BLE模塊在可連接模式下的RSSI 測量值波動(dòng)范圍在±10 dB 左右;相比之下,BLE模塊在不可連接模式下的RSSI 測量值波動(dòng)范圍明顯減小至±4 dB 左右,減少了約60%,有效提高了測距穩(wěn)定度。
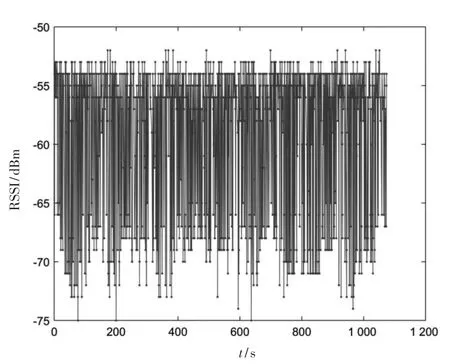
圖3 BLE模塊在可連接模式下的RSSI 測量值
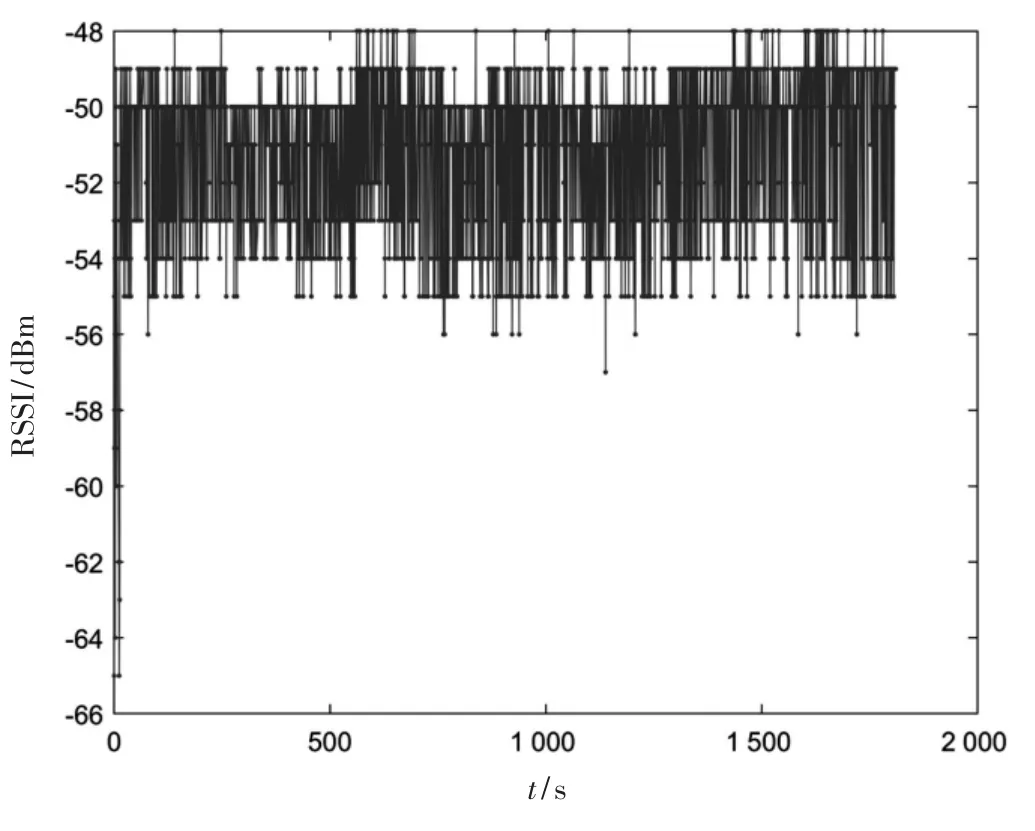
圖4 BLE模塊在不可連接模式下的RSSI 測量值
值得指出的是,對于三邊交會定位而言,BLE模塊的絕對測距精度是十分重要的;但對于Fingerprinting 定位而言,由于并不關(guān)心BLE模塊與用戶之間的真實(shí)距離,而是更加重視RSSI Database 與用戶在線RSSI 測量值之間的匹配一致性,因此BLE模塊的測距穩(wěn)定度顯得更為重要。
3.2 定位精度
為進(jìn)一步考察對定位精度的影響,在北京某大型寫字樓地下停車場內(nèi)布置了基于BLE 的室內(nèi)定位環(huán)境。其中,BLE模塊的安裝間距約3~5 m,地面位置指紋參考點(diǎn)的采樣步長為1 m,如圖5 所示。
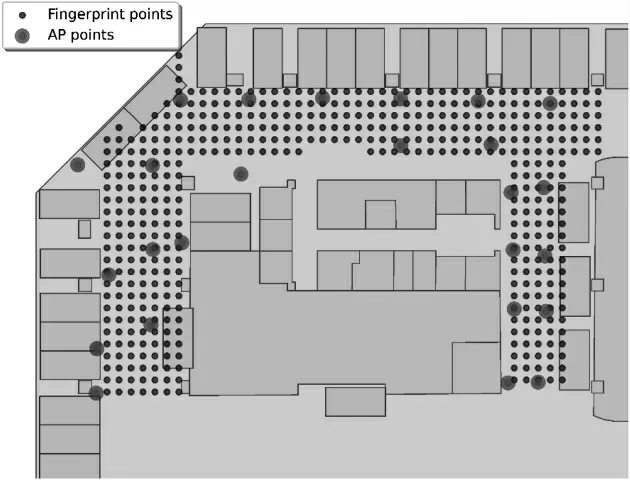
圖5 某地下停車場BLE 室內(nèi)定位環(huán)境布設(shè)
在圖5 所示區(qū)域內(nèi),先后將各BLE模塊分別設(shè)置為“可連接模式”和“不可連接模式”進(jìn)行RSSI 位置指紋數(shù)據(jù)采樣,并使用裝有自研APP 軟件的智能手機(jī),利用WKNN 算法進(jìn)行Fingerprinting 在線定位(頻率1 Hz),所得到的定位結(jié)果如圖6 所示。
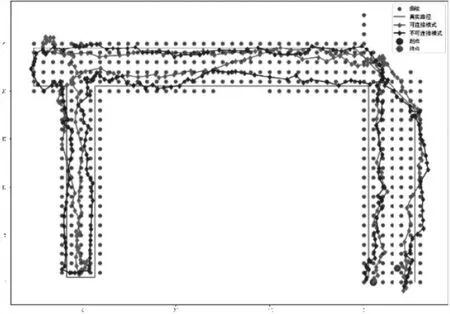
圖6 不同連接模式下的定位結(jié)果
從圖6 中可以看出,當(dāng)各BLE模塊設(shè)置為“不可連接模式”進(jìn)行指紋數(shù)據(jù)采集和用戶在線定位時(shí),系統(tǒng)能夠獲得明顯更優(yōu)的定位精度,用戶運(yùn)動(dòng)軌跡更加接近真實(shí)軌跡。統(tǒng)計(jì)可知,用戶在BLE“可連接模式”下的二維位置坐標(biāo)均方根誤差(RMS)為1.40 m,在BLE“不可連接模式”下的二維位置坐標(biāo)RMS 誤差為0.58 m。
4 結(jié)論
基于藍(lán)牙RSSI 測量的位置指紋定位是當(dāng)前室內(nèi)定位技術(shù)中最常見的方法之一。本文研究發(fā)現(xiàn),不同通信連接方式下的藍(lán)牙設(shè)備測距性能具有很大差異,進(jìn)而會對系統(tǒng)最終定位性能造成顯著影響。針對這一關(guān)鍵問題,本文針對不同連接模式下的藍(lán)牙BLE 測距性能進(jìn)行了測試和分析。在此基礎(chǔ)上,利用自行搭建的室內(nèi)定位環(huán)境開展實(shí)驗(yàn),驗(yàn)證和分析了其對用戶實(shí)際定位精度的影響。實(shí)驗(yàn)結(jié)果表明,當(dāng)各BLE模塊設(shè)置為“不可連接模式”進(jìn)行指紋數(shù)據(jù)采集和用戶在線定位時(shí),系統(tǒng)能夠獲得明顯更優(yōu)的定位精度,是室內(nèi)藍(lán)牙定位的優(yōu)選通信連接方式。
猜你喜歡
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
創(chuàng)業(yè)家(2015年10期)2015-02-27 07:55:08
創(chuàng)業(yè)家(2015年10期)2015-02-27 07:54:39