百香果采摘末端執行機構的總體結構設計與分析*
2021-07-30 01:12:08黃才貴辛華健
南方農機 2021年14期
黃才貴,辛華健
(1.南寧學院,廣西 南寧 530200;2.廣西工業職業技術學院,廣西 南寧 530001)
0 引言
熱帶和亞熱帶地區富產百香果,我國百香果種植主要分布在南方,如廣東、廣西、云南、福建、臺灣等地區,這些地區氣候偏暖和。百香果成熟后發出10多種水果香味,果汁酸甜爽口、口感濃郁,氣味芳香,所以可以稱之為飲料之王[1-4]。同時,百香果富含氨基酸、維生素等營養成分[5]。隨著百香果的市場需求不斷加大,在廣西南寧、玉林、百色等地均有大量種植,種植的主要是紫百香果。近幾年,百香果作為南方部分地區脫貧致富的農作物,市場前景好[6-7]。當大量采摘百香果時,人工分級就變得復雜,消耗大量的人力物力。因此,如何發揮廣西省百香果的資源優勢和產量優勢,擴大百香果的銷售,已成為目前面臨的一個重大問題。
近年來,盡管我國農業機械化發展較快,但整體水平還比較落后,特別是在水果采摘的機械化裝備上。目前,百香果采摘主要還是以人工為主,其勞動強度大、效率低、人工成本高且安全性低。目前也出現一些水果采摘的機器人或者裝置,但大多還是處于研究試驗階段,還不能百分百做到柔性采摘,在采摘過程中容易出現擠破果實的現象,采摘技術還不夠成熟。關于百香果采摘的裝置或者機械手,目前尚未發現。基于此,筆者設計了一種結構簡單合理且輕便的百香果采摘末端執行機構。
1 總體結構方案設計及原理
1.1 總體結構方案
百香果采摘末端執行機構的總體設計圖如圖1所示,包括驅動部分、盤座部分、拉繩、關節一、關節二、關節三,其結構連接關系為:拉繩下端固定在驅動部分上,拉繩依次穿過盤座部分、關節一、關節二,拉繩上端固定在關節三上,關節一底部鉸接于盤座部分上,關節二底部鉸接于關節一上端,關節三底部鉸接于關節二上端。

圖1 總體設計圖
1.2 工作原理及優點
機械手中的彈簧A、彈簧B、彈簧C、彈簧D的彈力大小對比為:彈簧B<彈簧C<彈簧D<彈簧A。彈簧B、彈簧C、彈簧D彈力依次增大,因為彈力越小使得變形量越大,則收縮越快,使得關節一、關節二、關節三依次向內收縮包絡夾持果實。彈簧A彈力最大,目的是等關節一、關節二、關節三對果實夾持完了之后,再克服壓力球的力,當達到或大于壓力球的力時,則會在彈簧A大變形之后快速驅動拉繩而帶動活動盤以上的部件和果實快速旋轉,將果實旋轉摘下。
工作時,拉動驅動桿,通過拉桿帶動彈簧A再帶動拉繩,拉繩驅動關節一、關節二和關節三往內轉動包絡夾持果實,繼續拉動驅動桿,則滑塊克服壓力球的作用,在拉繩的驅動下活動盤被快速拉動旋轉,進而帶動三個關節以及被包絡的果實快速旋轉,將果實摘下,松開驅動桿后,在扭簧的驅動下活動盤回位,關節一、關節二和關節三張開,即可拿出果實。
機構具備的優點為:其中的關節一、關節二、關節三處采用三級的彈簧設計,實現三個關節的逐步按順序夾持的動作,采摘時可以保證一定的柔性夾持,盡可能避免百香果由于壓力過大受損。此外,固定座上設置的壓力球,可以在果實被機械手包絡之后,繼續拉動驅動桿使得活動盤旋轉,從而讓果實被快速摘下,結構設計合理適用。
2 各關鍵部件的結構設計
2.1 三指柔性關節的設計
三指柔性關節的結構如圖2所示,關節一上固定設置有套環A,關節二上固定設置有套環B,關節三上固定設置有套環C,套環A、套環B、套環C上設置有孔洞,拉繩依次穿過套環A、套環B、套環C上的孔洞,拉繩上端與套環C固定連接。
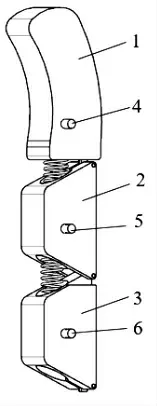
圖2 三指柔性關節的結構
2.2 驅動部分設計
驅動部分結構如圖3所示,包括驅動桿、拉桿、連接盤A、彈簧A、連接盤B,拉桿的材質為橡膠,其結構連接關系為:拉桿下端固定連接驅動桿上端,拉桿上端固定連接連接盤A,連接盤A和連接盤B之間連接設置有彈簧A,彈簧A下端固定連接連接盤A,彈簧A上端固定連接連接盤B,拉繩的下端固定連接在連接盤B上。關節一和活動盤之間設置有彈簧B,關節一和關節二之間設置有彈簧C,關節二和關節三之間設置有彈簧D,其結構連接關系為:彈簧B下端固定連接活動盤,彈簧B上端固定連接關節一;彈簧C下端固定連接關節一,彈簧C上端固定連接關節二;彈簧D下端固定連接關節二,彈簧D上端固定連接關節三。
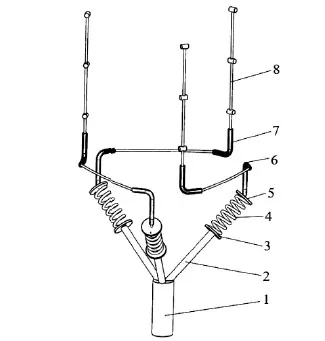
圖3 驅動部分結構
2.3 盤座部分設計
盤座部分結構圖如圖4所示,包括固定盤、活動盤、固定座,其結構連接關系為:固定座固定同軸安裝在固定盤上,活動盤同軸安裝在固定座上。固定盤外圈處設置有套管B,套管B穿過固定盤,活動盤外圈處設置有套管A,套管A穿過活動盤,套管B和套管A上設置有通孔,拉繩穿過套管B和套管A上的通孔。活動盤和固定座之間設置有扭簧,扭簧上端固定連接活動盤,扭簧下端固定連接固定座。
固定盤上設置有滑槽,滑槽內設置有壓力球和彈簧,彈簧一端固定連接滑槽,彈簧另一端固定連接壓力球。活動盤下部設置有滑塊,滑塊頂部固定連接在活動盤下部,滑塊底部滑動安裝在固定座的滑槽內。
如圖5所示,壓力球中設置有限壓結構,包括凹槽、壓力珠、彈簧E,其結構連接關系為:彈簧E設置在凹槽內一側的孔洞里,彈簧E一端固定連接孔洞底部,彈簧E另一端固定連接壓力珠。活動盤和固定座之間設置有扭簧,扭簧上端固定連接活動盤,扭簧下端固定連接固定座。
3 結構的力學分析與有限元仿真
在工作過程中,需要驅動拉繩拉動套環進而驅動關節的動作,此時需要考慮套環的剛度和強度、變形等是否符合要求,變形過大或者過小、剛度和強度不夠都會影響關節驅動動作和后續的夾緊動作,因此,需要對套環和關節的連接進行有限元分析。對其有限元分析的基本思路如下。
1)首先,利用三維數字設計軟件將三維數字模型建立好,再將模型導入到有限元分析軟件中,進行網格劃分,繪制出關節三維數字模型如圖6所示。

圖6 關節三維數字模型
2)接著進行模型的前置處理,在有限元分析軟件中建立力學關系,對于靜態的力學分析采用靜力結構分析,導入到有限元分析軟件的運動動力學分析模塊,然后進行網格劃分,選擇的網格劃分方式為自動劃分,得到的劃分結果如圖7所示。

圖7 網格劃分結果
3)然后設置模型的材料屬性,賦予材料特性,主要包括材料的類型、名稱、彈性模量、泊松比、質量密度、抗拉強度、屈服強度等等,添加材料屬性;設置材料屬性:設置關節的材料為ABS材質,材料庫中添加ABS材料,并將材料性能賦予到材料中,各項參數如表1所示[8]。
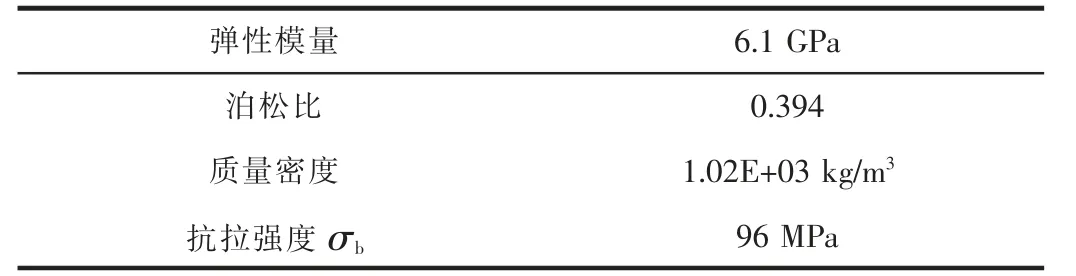
表1 ABS材質部分屬性
4)對模型的受力點進行約束和載荷的施加,設置好約束類型,添加合適的載荷,如圖8所示,施加的載荷在套環處。

圖8 約束和載荷的施加
5)最后,進行后處理分析,結算之后查看總變形云圖和等效應力云圖,分析云圖的最大值,并對比分析是否符合設計要求,再求解,得到結果如圖9所示為總變形云圖,如圖10所示為等效應力云圖。

圖9 總變形云圖

圖10 等效應力云圖
由有限元分析結果可知,最大變形量為0.022 1 mm,變形量極小,符合要求;最大應力點為5.003 MPa,遠小于屈服強度,符合設計要求。
4 結語
通過對其手指關節外形及內部傳動結構的設計,實現一定柔性的果實采摘,保證采摘果實的完好性以及采摘的有效性和穩定性。最后,經過有限元分析,說明了設計的結果符合要求,這為之后百香果采摘機械化提供一定的技術基礎和參考。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
少先隊活動(2021年4期)2021-07-23 01:46:22
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
現代企業(2015年9期)2015-02-28 18:56:50
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
都市快軌交通(2014年4期)2014-02-27 08:35:05