基于合成運動的Delta機器人軌跡規劃
2021-07-25 13:57:14劉現偉頡潭成徐彥偉王亞南
制造業自動化 2021年7期
關鍵詞:規劃
劉現偉,頡潭成,徐彥偉,王亞南
(河南科技大學 機電工程學院,洛陽 471003)
0 引言
Delta機器人具有定位精度高、承載能力強、運行速度快等優點,被廣泛應用于流水包裝線上,完成大批量、重復性的快速分揀、抓取等拾放操作[1]。
軌跡規劃直接影響Delta機器人在分揀、抓取作業時的運動平滑性和穩定性。在拾放操作中,常用門型軌跡作為抓取-放置動作,由于門型軌跡在豎直與水平方向上存在直角過渡,在高速運行時會產生機械振動現象。而合理規劃運動軌跡[2]能夠減少振動,延長機構的使用壽命,這對于制造業的發展具有重要意義。
國內外學者對Delta機器人在高速高頻作業時的運動軌跡和運動規律進行了廣泛而深入的研究。天津大學的張利敏[3]研究表明,機器人末端的運動軌跡直接影響機構的動態精度。張祥[4]提出一種基于修正梯形運動規律的弧線軌跡規劃方法,該方法能夠減小直角處的沖擊,可使門型軌跡過渡部分更加平滑。蘇婷婷[5]等提出一種基于畢達哥拉斯速端曲線的軌跡規劃方法,可使軌跡平滑且運動平穩。解則曉[6]提出一種基于Lamé曲線的軌跡規劃方法,在減小運動過程中機械手殘余振動方面效果良好。叢明[7]等提出一種基于凸輪運動曲線的橢圓路徑,能有效減小對關節空間的沖擊,縮短機器人的拾取時間。上述研究成果多從直角過渡部分優化門型軌跡,以提高直角坐標空間和關節坐標空間的平穩性能。
基于合成運動的圓弧軌跡在時間分配上比門型軌跡更有優勢,能大大降低角加速度和末端加速度的峰值,提高運動的平穩性,減少機構的振動,查閱相關文獻,基于合成運動的Delta機器人軌跡規劃研究內容相對較少。基于此,本文在約束運動周期的前提下,研究了一種基于合成運動的Delta機器人軌跡規劃方法,使Delta機器人在運動過程中,在關節和直角坐標空間都具有較好的運動性能,進而減少機構的振動,延長使用壽命。
1 運動軌跡規劃
為完成拾放操作的任務,需對機器人末端運動軌跡進行規劃。則設定運動軌跡的三個關鍵點:起始點、末端點和避障最高點。Delta機器人在拾放作業時常使用門型軌跡,如圖1所示。設定運動方向為:A→B→C→D→E,水平距離|AE|=l,豎直距離|AB|=|DE|=h。在常規門型軌跡中l>h,則可由劣弧完成拾放作業。
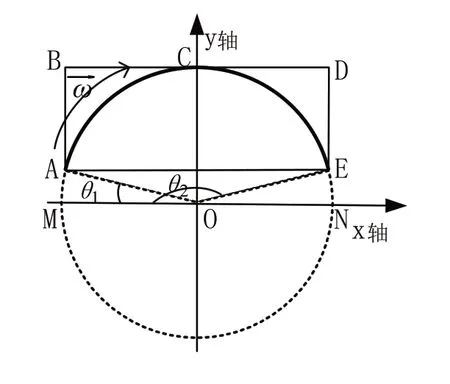
圖1 圓弧型拾放操作軌跡
1.1 基于合成運動的圓弧軌跡規劃

式中,τ∈[0,1],T為運動周期。
因圓周運動在x軸與y軸方向上是關于參數θ的正余弦函數,為使圓周運動的速度、加速度達到軌跡規劃的條件,將參數θ規劃為關于時間t的3-4-5次多項式,由圓的參數方程與多項式運動規律,得x軸與y軸方向上分運動復合公式:

式中t∈[0,T],θ(t)為3-4-5次多項式,T為運動周期,(a,b)為圓心坐標,r為圓的半徑。在運動過程中,由合成運動規律,在豎直方向與水平方向運動的時間均為運動周期T。
1.2 基于梯形加速度的門型軌跡規劃
在加減速運動規律中使用較多的是S形加減速模型,本文采用七段S形加減速運動規律作為對比,速度、加速度的曲線如圖2所示。七段S形加減速的加速度推導公式可參考文獻[12,13]。
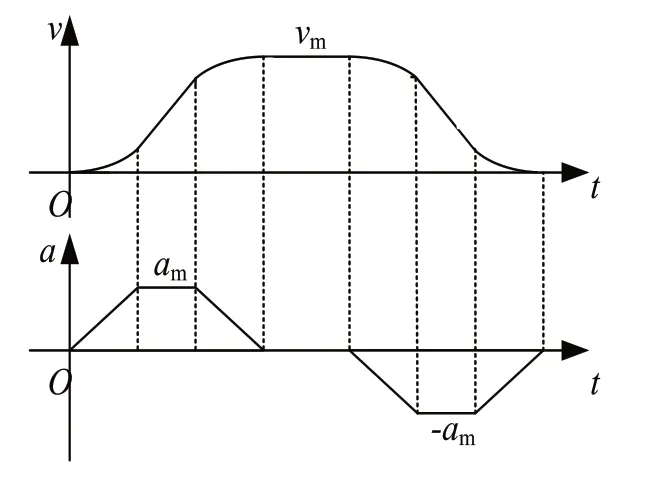
圖2 S形加減速曲線圖
在該軌跡規劃方法中,機器人在拾放操作運動軌跡的水平和豎直方向均采用七段S形加減速運動規律。設機器人的拾放操作周期為T,豎直上升階段的時間為T1,水平運動階段的時間為T2,豎直下降階段的時間為T3,各個階段運動時間按照各段軌跡的長度進行分配。
2 仿真與分析
仿真實驗時,設圖1中門型軌跡A、B、C、D、E各點的坐標依次為A(-141.36,0,-400),B(-141.36,0,-310),C(0,0,-310),D(141.36,0,-310),E(141.36,0,-310)。用MATLAB軟件中Simmechanics模塊對基于合成運動的圓弧軌跡規劃方法和基于梯形加速度的門型軌跡規劃方法進行了仿真對比分析,得到機器人末端的軌跡曲線,如圖3所示。該Delta機器人的特性參數如表1所示。

表1 Delta 機器人參數

圖3 運動軌跡圖
2.1 關節坐標空間軌跡運動特性
通過仿真,得到了Delta機器人在運動過程中關節坐標空間中的角位移、角速度、角加速度曲線。在基于梯形加速度的門型軌跡規劃方法下,角位移曲線如圖4(a)所示,角速度曲線如圖5(a)所示,角加速度如圖6(a)所示。在基于合成運動的圓弧軌跡規劃方法下,角位移曲線如圖4(b)所示,角速度曲線如圖5(b)所示,角加速度如圖6(b)所示。

圖4 角位移曲線

圖5 角速度曲線
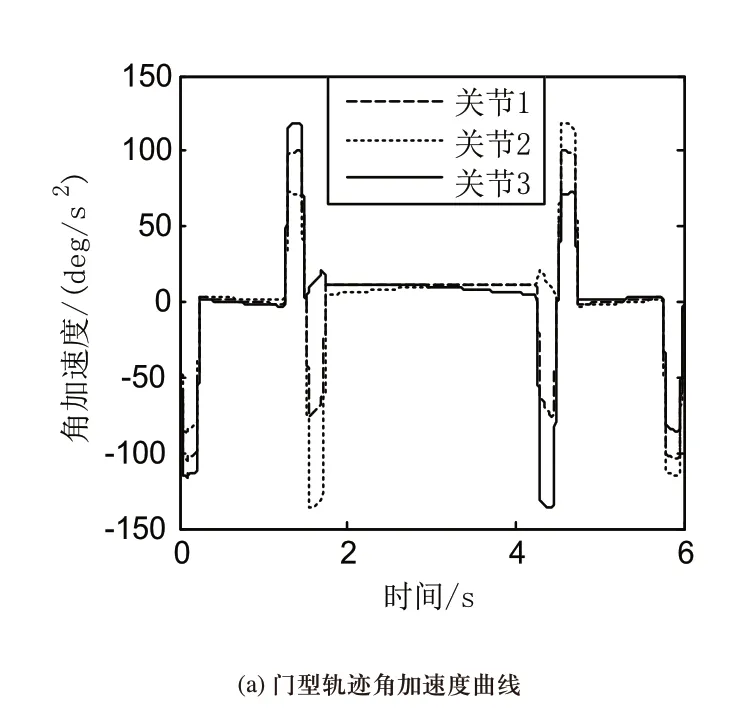

圖6 角加速度曲線
由圖4角位移曲線得,門型軌跡的角位移曲線存在波動現象,而圓弧型軌跡在角位移空間的曲線更加平滑,自然。并且合成圓形軌跡的整體角位移區間范圍比門型軌跡的角位移區間范圍減少13%左右。由圖5角速度曲線得,門型軌跡的角速度的峰值與合成圓弧軌跡的角速度峰值相差不大,但門型軌跡的角速度曲線存在尖點,角速度的變化趨勢較為劇烈,而圓弧軌跡的角速度曲線較為平滑,曲線的變化趨勢較為緩和、流暢。由圖6角加速度曲線得,門型軌跡的角加速度曲線變化較為劇烈,存在較多尖點,并且峰值較大,存在較多的加減速過程,會對電機造成沖擊,影響其使用壽命。而圓弧軌跡的角加速度曲線平滑流暢,不存在尖點。由表2電機狀態數據對比可得,圓弧軌跡中1軸與2軸的角速度峰值比門型軌跡的有所減少,3軸的角速度峰值比門型軌跡的有所增加,總體來說,圓弧軌跡與門型軌跡的角速度峰值相差不大。而圓弧軌跡的角加速度峰值比門型軌跡的角加速度峰值減少了60%左右,并且圓弧軌跡的角加速度曲線光滑,無突變,無柔性沖擊,峰值較小。

表2 電機運動狀態對比
2.2 直角坐標空間軌跡運動特性
由仿真得到基于梯形加速度的門型軌跡規劃方法下的末端速度、加速度曲線,如圖7(a)、圖8(a)所示。基于合成運動的圓弧軌跡規劃方法下的末端速度、加速度曲線,如圖7(b)、圖8(b)所示。
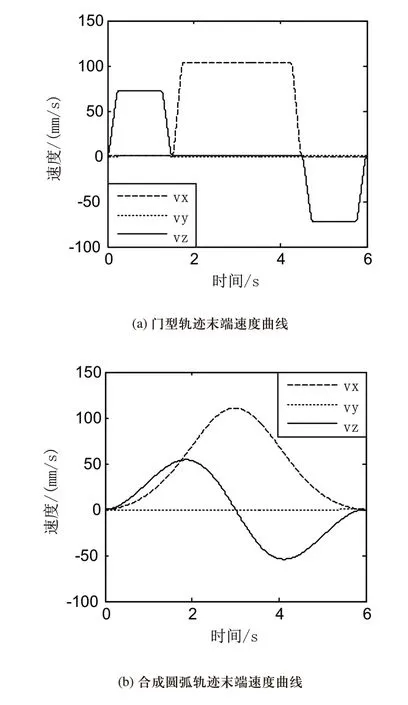
圖7 末端速度曲線
由圖7末端速度曲線得,門型軌跡的速度峰值與圓弧型軌跡的速度峰值相差不大,相比較而言,圓弧軌跡的速度曲線更加平滑,沒有尖點出現,有著較好的運動特性。由圖8末端加速度曲線得,門型軌跡的加速度曲線存在較多的尖點,并且要經過多次的加減速過程,存在較多的柔性沖擊。而圓弧軌跡的加速度曲線更流暢、平滑,無柔性沖擊,加減速過程較少。由表3末端運動狀態可得,在x軸方向上,圓弧軌跡的末端速度峰值比門型軌跡的速度峰值稍大,在z軸方向上,圓弧軌跡的速度峰值減少了20%左右。對比表3中的末端加速度峰值,在x軸與z軸方向上,圓弧軌跡的加速度的峰值比門型軌跡的加速度峰值減少了80%左右。通過仿真數據分析y方向的狀態,圓弧軌跡在y軸方向上的速度峰值與加速度峰值都較小,說明圓弧軌跡在y軸方向上的抖動比門型軌跡的小。從整體來分析,圓弧軌跡能夠大大減少機構的振動現象,使機器人運行平穩。

表3 末端運動狀態對比

圖8 末端加速度曲線
3 樣機試驗
為驗證文中所規劃的機器人運動軌跡的實際運動特性,搭建了如圖9所示的Delta機器人實驗平臺,并進行驗證分析。機器人控制器選用PMAC系列中的Turbo PMAC2-Eth-Lite控制器(又稱“Clipper”),驅動器型號為A-SV15,伺服電機型號為60ST-M01930,減速機型號為PLX60-5,減速比為5:1。主動臂及動平臺材料為鋁合金,從動臂材料為碳纖維。數據采集系統用PMAC卡中的DPRAM數據采集緩沖區,采集的數據為2500線增量式編碼器所反饋的實際脈沖數,采樣頻率為112.5Hz。

圖9 Delta機器人實驗平臺
通過樣機試驗,采集電機運動過程中的實際脈沖數據,并將其轉化為角度數值,得到門型軌跡的關節坐標空間曲線,如圖10(a)、圖11(a)和圖12(a)所示,得到圓弧軌跡的關節坐標空間曲線,如圖10(b)、圖11(b)和圖12(b)所示。對比分析關節坐標空間曲線可得,基于合成運動的圓弧軌跡的關節空間曲線比門型軌跡的更平滑,在實際試驗過程中,基于合成運動的圓弧軌跡比門型軌跡的運動狀態更平穩。

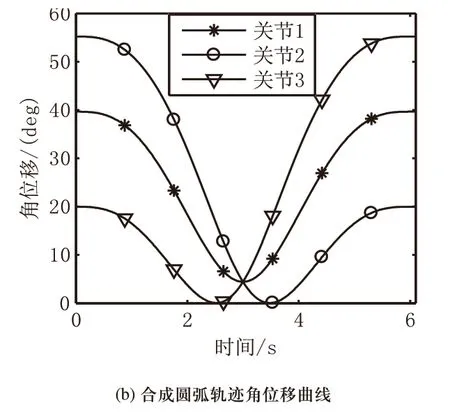
圖10 角位移曲線
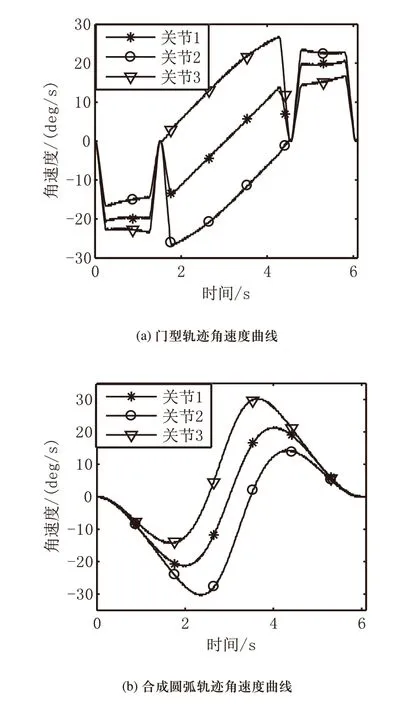
圖11 角速度曲線


圖12 角加速度曲線
4 結語
利用合成運動方法規劃了Delta并聯機器人的拾放操作軌跡,在約束拾放操作周期的前提下,分析了關節坐標空間與直角直角空間的運動特性曲線。研究結果表明:1)基于合成運動的圓弧型軌跡在水平與豎直方向上的運動時間均為拾放操作的周期,與基于梯形加速度的門型軌跡相比,其時間分配更有優勢。另外合成運動不需要對運動軌跡進行分段處理,更易于實現運動算法的編寫。2)合成圓弧軌跡可顯著提高運動的平穩性,其在關節坐標空間與直角坐標空間的運動曲線光滑、連續、無尖點,具有更好的柔順性。3)合成圓弧軌跡在關節坐標空間中與直角坐標空間的加速度峰值分別減少60%、80%左右,更有利于減小運動過程中的振動現象。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
