基于正交雙相機(jī)的洗車定位算法研究
2021-07-25 13:57:42吳志偉
制造業(yè)自動(dòng)化 2021年7期
朱 敏,吳志偉
(電氣與自動(dòng)化工程學(xué)院 合肥工業(yè)大學(xué),合肥 230009)
0 引言
經(jīng)濟(jì)的發(fā)展給人們生活質(zhì)量帶來了巨大的改變,汽車數(shù)量日益增多后對(duì)洗車行業(yè)的服務(wù)要求也是越來越高。現(xiàn)在我們熟知的洗車方式還是傳統(tǒng)人工洗車,但人工洗車還是存在著許多弊端。傳統(tǒng)的人工洗車行業(yè)逐漸的滿足不了現(xiàn)在人們對(duì)洗車行業(yè)的要求;如今在洗車市場(chǎng)中洗車機(jī)的普及率還不是很高,使用較為廣泛的洗車機(jī)有無接觸自動(dòng)洗車機(jī)和毛刷式自動(dòng)洗車機(jī)[1~3]。本文提出正交雙相機(jī)車身定位算法洗車機(jī)是基于圖像視覺的自動(dòng)洗車機(jī),采用圖像視覺技術(shù)能夠精確的得到車身特征點(diǎn)的位置坐標(biāo)[4,5];并且使用六自由度洗車臂可以利用它的靈活性好,幾乎可以在任何角度下工作。這種精巧的結(jié)構(gòu)設(shè)計(jì)不但在性能上有很好的保障,而且它所要求的場(chǎng)地面積也比較小。與現(xiàn)階段市面上常見兩種類型的洗車機(jī)相比,本洗車系統(tǒng)存在著很好的市場(chǎng)價(jià)值。
1 系統(tǒng)平臺(tái)
1.1 圖片采集平臺(tái)
為了能夠有效的采集到汽車車身的圖片信息,本系統(tǒng)對(duì)拍攝相機(jī)的位置進(jìn)行固定,其示意圖如圖1所示。
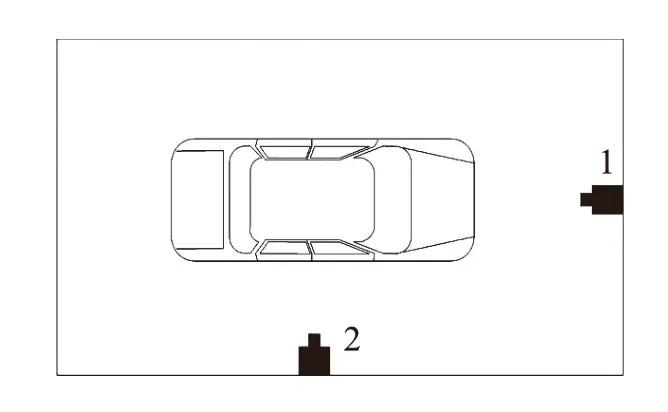
圖1 相機(jī)位置示意圖
待洗汽車停放區(qū)域?yàn)橐粔K白色的矩形區(qū)域,汽車車身的圖像采集由兩個(gè)互相垂直放置的相機(jī)完成;其中1號(hào)相機(jī)負(fù)責(zé)拍攝汽車的正視圖,2號(hào)相機(jī)負(fù)責(zé)拍攝汽車的側(cè)視圖。
1.2 車身特征點(diǎn)的確定
本系統(tǒng)的核心就是在于提取車身的外圍坐標(biāo),但經(jīng)過圖片處理之后得到的汽車外圍輪廓圖像包含了大量的外圍點(diǎn)坐標(biāo)信息,這樣就會(huì)導(dǎo)致計(jì)算復(fù)雜,降低了算法的可靠性。經(jīng)過對(duì)車身邊緣輪廓特點(diǎn)的分析,本文采取在汽車邊緣輪廓提取有代表性的特征點(diǎn),利用特征點(diǎn)坐標(biāo)代替大量外圍點(diǎn)坐標(biāo)信息。特征點(diǎn)的確定如圖2所示。
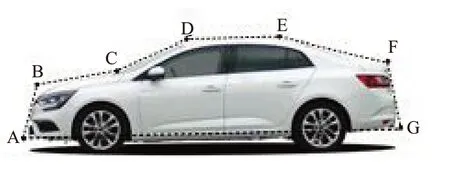
圖2 特征點(diǎn)位置示意圖
記圖2車身側(cè)視圖中的特征點(diǎn)分別為A、B、C、D、E、F、G;由于汽車的車身圖像是軸對(duì)稱圖形,則對(duì)應(yīng)于車身的另一側(cè)特征點(diǎn)分別記為A'、B'、C'、D'、E'、F'、G'。因此只要求出這兩組點(diǎn)的坐標(biāo),即可定位[6]整個(gè)車身。
2 側(cè)視圖中特征點(diǎn)坐標(biāo)的求解
2.1 圖像預(yù)處理及車身輪廓提取
由于拍攝環(huán)境的原因,圖像采集難免會(huì)有噪聲。因此在對(duì)車身圖像進(jìn)行算法處理之前首先需要對(duì)圖像進(jìn)行去噪。對(duì)經(jīng)過灰度化和去噪處理的車身圖像進(jìn)行二值化分割,最終將原圖像中的背景和車身目標(biāo)分割開來。但本文接下來只需要對(duì)車身的邊緣[7]進(jìn)行處理,所以通過提取最大連通區(qū)域算法對(duì)圖像進(jìn)行處理,得到最大連通區(qū)域并將其單獨(dú)顯示出來,結(jié)果如圖3所示。
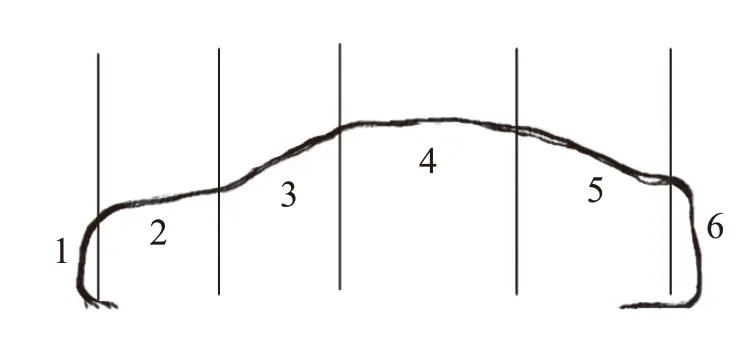
圖3 最大連通區(qū)域示意圖
2.2 車身輪廓的直線擬合
提取最大連通區(qū)域之后,就得到本文所需要處理的車身的主要輪廓信息。由圖3可以看出,雖然得到了車身的主要邊緣信息,但車身的各部分邊緣都是由曲線組成;如果直接對(duì)車身進(jìn)行直線檢測(cè)的話得到的效果不會(huì)太好。通過對(duì)圖3進(jìn)行像素掃描,對(duì)不同曲線段的像素點(diǎn)進(jìn)行分割,得到六個(gè)不同的點(diǎn)集,分別為點(diǎn)集M1、M2、M3、M4、M5、M6。不同的點(diǎn)集里存放著車身不同曲線段的像素點(diǎn)坐標(biāo)。本文接下來采用最小二乘法分別對(duì)六個(gè)不同的點(diǎn)集進(jìn)行直線擬合[8,9],得到車身各部分曲線段的近似直線,并且相鄰部分的直線之間會(huì)有一個(gè)交點(diǎn),該交點(diǎn)就是本文包圍車身所確定的特征點(diǎn)。
假設(shè)給定一系列離散點(diǎn)組成的坐標(biāo)集合,即為M={(x0,y0),(x1,y1),…(xn,yn)},直線擬合目的就是找到一個(gè)函數(shù)f(x)kx+b使得f(x)函數(shù)盡可能的擬合離散坐標(biāo)點(diǎn)集M。最小二乘法擬合直線函數(shù)f(x)的主要原理是:對(duì)于f(x)=kx+b求得其對(duì)于各個(gè)離散點(diǎn)平方差的最小值,如式(1)所示:
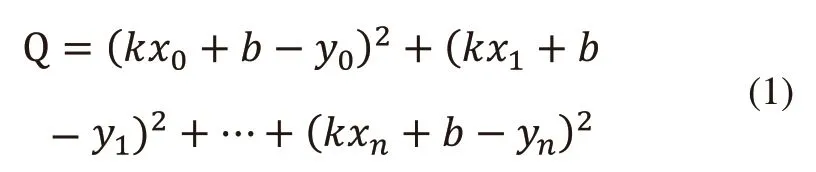
當(dāng)Q取最小時(shí),求k、b的值。
因?yàn)樽鴺?biāo)點(diǎn)集M中的離散點(diǎn)均為已知變量,問題可轉(zhuǎn)化為求解Q=f(k,b)的最小值,即求解點(diǎn)(k,b)使得 Q=f(k,b)在此點(diǎn)處取得極小值。使用偏導(dǎo)數(shù)求 f(k,b)極小值:
點(diǎn)集M1、M2、M3、M4、M5、M6進(jìn)行直線擬合結(jié)果如圖4所示。

圖4 車身直線擬合示意圖
2.3 霍夫直線檢測(cè)
經(jīng)過最小二乘法直線擬合之后,得到了離散點(diǎn)集擬合的直線并顯示在原圖中,但不同的擬合線段的直線方程并沒有得到;因此選擇使用霍夫直線檢測(cè)在相鄰的擬合直線之間做二次檢測(cè)對(duì)擬合過的直線進(jìn)行霍夫直線檢測(cè)。當(dāng)檢測(cè)到直線之后可以由代數(shù)法計(jì)算出直線的交點(diǎn)。
1)霍夫直線檢測(cè)
本文采用累計(jì)概率霍夫變換進(jìn)行對(duì)擬合的直線進(jìn)行檢測(cè),OpenCV標(biāo)準(zhǔn)函數(shù)庫中的HoughLinesP()函數(shù)可以實(shí)現(xiàn)直線檢測(cè)功能;將圖4作為檢測(cè)函數(shù)的第一個(gè)參數(shù),即原圖像;第二個(gè)參數(shù)是存放著檢測(cè)到直線的起始坐標(biāo)點(diǎn)。在下文中求解相鄰擬合直線之間的交點(diǎn)時(shí)就會(huì)使用第二個(gè)參數(shù)中存放的坐標(biāo)點(diǎn)。
2)代數(shù)法求解交點(diǎn)
經(jīng)累計(jì)概率霍夫變換檢測(cè)得到兩相交的直線后,利用下述的代數(shù)法求解出交點(diǎn)坐標(biāo)。
假設(shè)已知兩條直線l1、l2的方程如下:
并且已知兩直線l1、l2上的兩點(diǎn)分別為A1(x1,y1)、A2(x2,y2)和B1(x1*,y1*)、B2(x2*,y2*),則可求得兩直線的系數(shù)分別為:

將兩直線的參數(shù)代入即可求出交點(diǎn)的坐標(biāo),對(duì)上述車身擬合直線進(jìn)行霍夫直線檢測(cè)以及代數(shù)法計(jì)算出交點(diǎn)像素坐標(biāo),結(jié)果如下:
特征點(diǎn)A(12,198)、特征點(diǎn)B(27,135)、特征點(diǎn)C(131,116)、特征點(diǎn)D(231,70)、特征點(diǎn)E(366,70)、特征點(diǎn)F(501,123)、特征點(diǎn)G(520,207)
3 車身正視圖中特征點(diǎn)坐標(biāo)的求解
對(duì)側(cè)視圖經(jīng)過上面步驟處理只能得到車身一側(cè)的特征點(diǎn)坐標(biāo),為了得到車身另一側(cè)的特征點(diǎn)坐標(biāo)需要對(duì)車身的主視圖進(jìn)行處理計(jì)算出車身的寬度信息。通過尋找最小包圍矩形算法得到能將車頭完整包圍的最小矩形,并計(jì)算出這個(gè)最小矩形各頂點(diǎn)的坐標(biāo),車身的寬度[10]就是頂點(diǎn)橫坐標(biāo)之差。再將上述計(jì)算出的特征點(diǎn)進(jìn)行坐標(biāo)的平移即可得到車身四周的特征點(diǎn)坐標(biāo)。對(duì)車身主視圖處理過程如下:
首先對(duì)1號(hào)相機(jī)拍攝到的車身主視圖進(jìn)行圖像處理,主要處理過程與對(duì)車身側(cè)視處理過程基本一致,結(jié)果如下:
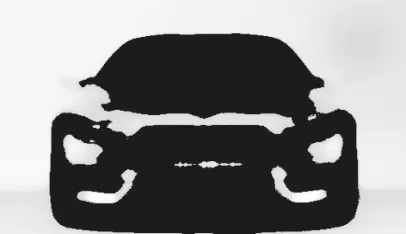
圖5 圖像處理結(jié)果示意圖
得到車身主視圖的二值化圖像以后,再利用OpenCV中minAreaRect()函數(shù)對(duì)車頭主視圖進(jìn)行尋找最小包圍矩形。運(yùn)行結(jié)果如圖6所示。
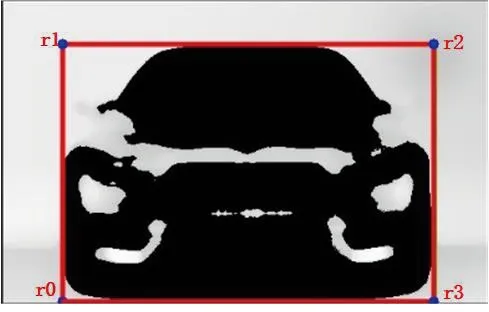
圖6 運(yùn)行結(jié)果示意圖
最小包圍矩形的頂點(diǎn)像素坐標(biāo)為:
頂點(diǎn)r0(61,309)、頂點(diǎn)r1(61,44);
頂點(diǎn)r2(443,44)、頂點(diǎn)r3(443,309)。
根據(jù)得到最小包圍矩形的頂點(diǎn)坐標(biāo)可知車身的寬度即矩形左右對(duì)稱頂點(diǎn)的橫坐標(biāo)之差。
4 坐標(biāo)的轉(zhuǎn)換
通過上述算法處理過程對(duì)圖像處理計(jì)算出的坐標(biāo)是在像素坐標(biāo)系中的像素坐標(biāo),并將其經(jīng)過坐標(biāo)系轉(zhuǎn)換至世界坐標(biāo)系中;最后將車身特征坐標(biāo)傳輸給洗車機(jī)械臂[11]的軌跡規(guī)劃中使用。坐標(biāo)系轉(zhuǎn)換關(guān)系如下為:
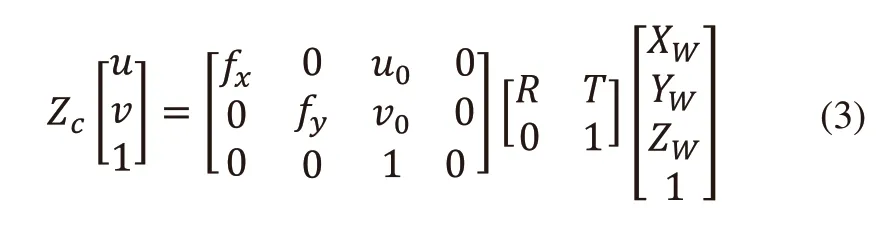
式(3)中Zc為空間中的點(diǎn)在相機(jī)坐標(biāo)系中Z軸方向的坐標(biāo),本文中即表示為相機(jī)距離車身的距離,在本系統(tǒng)中1號(hào)相機(jī)的Zc設(shè)定為2m,2號(hào)相機(jī)的Zc設(shè)定為3m。
等式左邊的矩陣為定位到的車身邊緣點(diǎn)的像素坐標(biāo)。
等式右邊第二個(gè)矩陣為相機(jī)的外參矩陣,其中包括旋轉(zhuǎn)矩陣和平移矩陣。
右邊第三個(gè)矩陣為車身邊緣點(diǎn)在世界坐標(biāo)系中的坐標(biāo),也就是所要轉(zhuǎn)換得到的坐標(biāo)值。
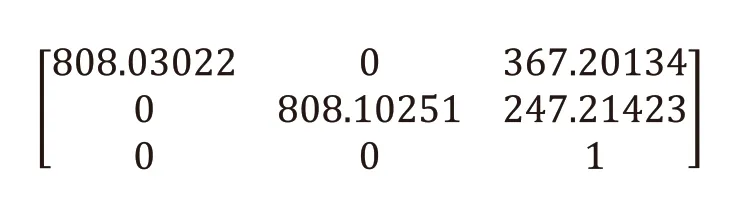
通過對(duì)相機(jī)的標(biāo)定得到上述相機(jī)的各參數(shù)如下:
內(nèi)部參數(shù)矩陣為:
外部參數(shù)矩陣為:
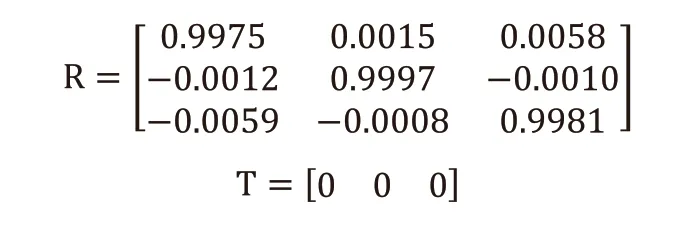
將相機(jī)的各參數(shù)矩陣以及車身的各特征點(diǎn)的像素坐標(biāo)代入式(4)中,對(duì)矩形頂點(diǎn)r0(61,309)和矩形頂點(diǎn)r3(443,309)坐標(biāo)轉(zhuǎn)換結(jié)果為r0'(-94,69,200)、r3'(92,69,200)因此車身的寬度為d=|(-94)-92|=186單位為cm。
則最終車身兩側(cè)的特征點(diǎn)坐標(biāo)如表1所示。
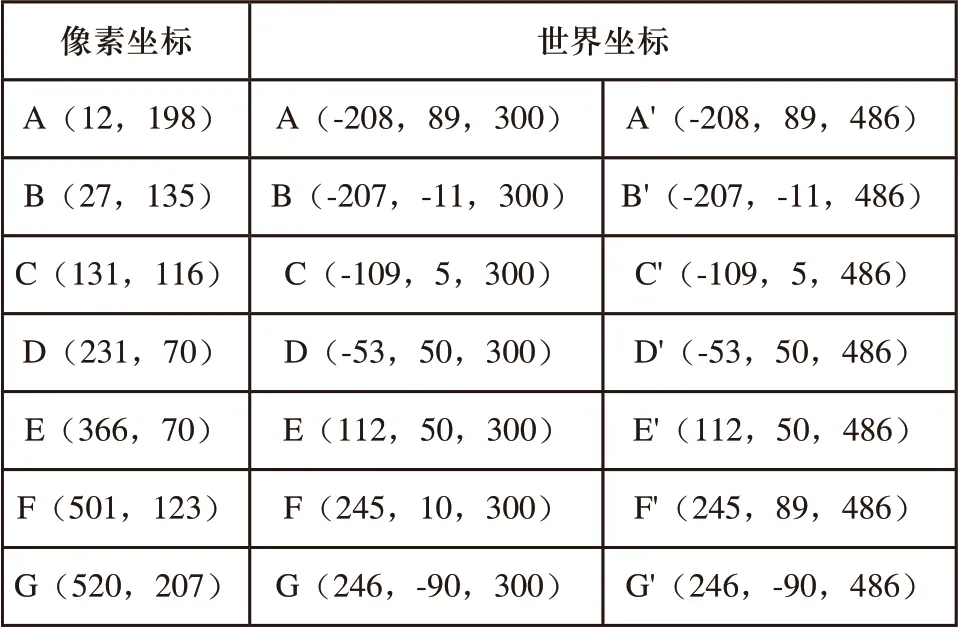
表1 特征點(diǎn)坐標(biāo)
5 結(jié)語
本文給出了一套完整的基于圖像視覺自動(dòng)洗車系統(tǒng)車身特征點(diǎn)的定位算法,通過本算法能夠得到精確的車身特征點(diǎn)位置信息。并將這些描述汽車車身位置信息的點(diǎn)坐標(biāo)傳輸給洗車機(jī)械臂再結(jié)合六自由度機(jī)械臂靈活性可以很好的提高洗車的效率和洗車效果,和市場(chǎng)上的洗車機(jī)相比有比較好的優(yōu)勢(shì),具有一定的市場(chǎng)和推廣意義。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
