基于深度殘差網(wǎng)絡(luò)的醫(yī)學(xué)超聲圖像多尺度邊緣檢測(cè)算法
2021-07-15 01:24:36李曉峰王妍瑋
吉林大學(xué)學(xué)報(bào)(理學(xué)版) 2021年4期
李曉峰, 李 東, 王妍瑋
(1. 黑龍江外國(guó)語(yǔ)學(xué)院 信息工程系, 哈爾濱 150025; 2. 哈爾濱工業(yè)大學(xué) 計(jì)算機(jī)科學(xué)與技術(shù)學(xué)院, 哈爾濱 150001; 3. 普度大學(xué) 機(jī)械工程系, 美國(guó)印第安納州 西拉法葉市 IN47906)
超聲圖像可有效輔助醫(yī)生準(zhǔn)確判斷和治療人體疾病, 目前在醫(yī)療診斷中應(yīng)用廣泛[1-2]. 但在分析醫(yī)學(xué)超聲圖像信息前, 需經(jīng)過(guò)計(jì)算機(jī)處理, 以獲取更精準(zhǔn)的圖像信息數(shù)據(jù). 通過(guò)邊緣檢測(cè)技術(shù)獲取圖像中物體的邊緣信息, 可為目標(biāo)圖像輸出提供可靠的數(shù)據(jù)支持[3].
深度卷積神經(jīng)網(wǎng)絡(luò)在圖像分析方面應(yīng)用廣泛, 但伴隨網(wǎng)絡(luò)深度的增加, 在卷積神經(jīng)網(wǎng)絡(luò)訓(xùn)練過(guò)程中, 易出現(xiàn)梯度過(guò)多或消失的情況, 導(dǎo)致訓(xùn)練不能正常進(jìn)行. 由此產(chǎn)生了一種深度殘差網(wǎng)絡(luò), 通過(guò)在卷積層中添加殘差學(xué)習(xí)單元, 緩解網(wǎng)絡(luò)訓(xùn)練問(wèn)題, 效果較好. 陸永帥等[4]利用深度殘差網(wǎng)絡(luò)進(jìn)行霾監(jiān)測(cè), 通過(guò)提取霾光譜曲線特征, 添加殘差學(xué)習(xí)緩解神經(jīng)網(wǎng)絡(luò)訓(xùn)練問(wèn)題, 基于數(shù)據(jù)分析完成霾監(jiān)測(cè), 結(jié)果表明該方法的識(shí)別精度較高; 段立娟等[5]采用多階段學(xué)習(xí)策略推算小波系數(shù), 提出了一種基于小波域的深度殘差網(wǎng)絡(luò), 將神經(jīng)網(wǎng)絡(luò)與小波損失函數(shù)相結(jié)合完成圖像超分辨率重建, 視覺效果較好; 查雄等[6]提出了一種基于深度殘差網(wǎng)絡(luò)的特定協(xié)議信號(hào)識(shí)別方法, 訓(xùn)練深度殘差網(wǎng)絡(luò), 構(gòu)建短波信號(hào)識(shí)別模型, 該方法對(duì)被強(qiáng)干擾遮擋條件下識(shí)別信號(hào)的準(zhǔn)確率較高; Sultana等[7]提出了一種具有正規(guī)化Fisher框架的深層殘留網(wǎng)絡(luò)檢測(cè)方法, 將類間方差信息整體最小化, 并將類間方差信息最大化, 分析了在類間散點(diǎn)矩陣中產(chǎn)生各種子空間的重要性, 然后利用總類間方差信息進(jìn)行降維, 用于黑色素瘤的檢測(cè), 在多個(gè)據(jù)庫(kù)上的實(shí)驗(yàn)結(jié)果表明, 與其他方法相比, 該方法效果較好.
圖像邊緣輪廓檢測(cè)通過(guò)多尺度邊緣檢測(cè)進(jìn)行圖像的紋理特征重構(gòu)和病理特征的邊界特征提取, 以提高圖像的識(shí)別和檢測(cè)能力. 傳統(tǒng)方法中, 對(duì)醫(yī)學(xué)超聲圖像的邊緣檢測(cè)方法主要有背景差分法、 銳化模板增強(qiáng)技術(shù)、 活動(dòng)輪廓特征檢測(cè)方法等. 文獻(xiàn)[8]對(duì)掃描圖像的真實(shí)特征邊緣進(jìn)行數(shù)值模擬, 檢測(cè)圖像邊緣信息, 通過(guò)構(gòu)建兩個(gè)模型用于放置樣本圖像和底物圖像, 很好地將邊緣特征和背景分離開, 該方法整體效果較好, 但計(jì)算復(fù)雜度較高, 收斂性較差; 文獻(xiàn)[9]提出了基于銳化模板增強(qiáng)技術(shù)的醫(yī)學(xué)超聲圖像多尺度邊緣檢測(cè)方法, 通過(guò)提取圖像的不變矩, 實(shí)現(xiàn)圖像的邊緣輪廓檢測(cè), 提高了超聲圖像的病灶特征識(shí)別能力, 但該方法在進(jìn)行復(fù)雜度較高的超聲圖像檢測(cè)時(shí)識(shí)別性較差, 且計(jì)算開銷較大; 文獻(xiàn)[10]提出通過(guò)先分析數(shù)據(jù)驅(qū)動(dòng)斷層的原始數(shù)據(jù)特征進(jìn)行圖像重建, 然后提取其診斷的特征進(jìn)行讀取, 提高了成像速度與分辨能力; 文獻(xiàn)[11]提出根據(jù)超生參數(shù)建立診斷模型, 使用代價(jià)敏感機(jī)器學(xué)習(xí)方法將模型進(jìn)行對(duì)比驗(yàn)證, 效果顯著, 降低了診斷代價(jià), 有實(shí)用價(jià)值; 文獻(xiàn)[12]提出結(jié)合MRI圖像與超聲圖像部分功能, 在診治過(guò)程中進(jìn)行監(jiān)控與導(dǎo)航, 該方法可實(shí)時(shí)獲得準(zhǔn)確的圖像, 并能清晰顯現(xiàn)腫瘤邊界; 文獻(xiàn)[13]提出了利用一個(gè)預(yù)處理器完成失真圖像的邊緣檢測(cè), 對(duì)于散斑圖像中的每個(gè)像素, 預(yù)處理器首先確定其是否為噪聲, 然后檢查其是否位于邊緣, 根據(jù)獲取的信息, 預(yù)處理器可定義不同的加權(quán)系數(shù)均衡每個(gè)像素, 以此對(duì)處理后的圖像執(zhí)行邊緣檢測(cè)機(jī)制, 繪制邊緣地圖, 但該方法運(yùn)行耗時(shí)長(zhǎng)且收斂效果不佳. 針對(duì)上述問(wèn)題, 本文提出一種基于深度殘差網(wǎng)絡(luò)的醫(yī)學(xué)超聲圖像多尺度邊緣檢測(cè)算法, 增強(qiáng)處理醫(yī)學(xué)超聲圖像信息, 并根據(jù)處理結(jié)果構(gòu)建多尺度圖像分割模型, 在分割輪廓基礎(chǔ)上, 融合區(qū)域像素, 通過(guò)分析區(qū)域像素獲取多尺度圖像邊緣特征; 根據(jù)深度殘差網(wǎng)絡(luò)進(jìn)行底層圖像信息的融合處理; 最后經(jīng)平滑處理, 實(shí)現(xiàn)多尺度邊緣檢測(cè). 實(shí)驗(yàn)結(jié)果表明, 本文算法的圖像分割精度平均值為94.4%, 特征提取準(zhǔn)確率在80%以上, 邊緣點(diǎn)查全性較高, 算法檢測(cè)耗時(shí)短, 收斂性高, 整體效果優(yōu)于其他對(duì)比算法.
1 多尺度圖像分割模型
深度殘差神經(jīng)網(wǎng)絡(luò)可通過(guò)對(duì)模擬人類學(xué)習(xí)行為的積累, 重組知識(shí)結(jié)構(gòu), 不斷完善自身性能. 為實(shí)現(xiàn)基于深度殘差神經(jīng)網(wǎng)絡(luò)的醫(yī)學(xué)超聲圖像多尺度邊緣檢測(cè), 首先構(gòu)建醫(yī)學(xué)超聲圖像的多尺度圖像分割模型, 然后通過(guò)對(duì)原始醫(yī)學(xué)超聲圖像進(jìn)行自動(dòng)標(biāo)注, 構(gòu)建醫(yī)學(xué)超聲圖像的灰度分布矩陣, 最后利用分布矩陣完成醫(yī)學(xué)超聲圖像的多尺度圖像分割. 以一張男性膀胱的超聲掃描圖為例, 其原始圖像的自動(dòng)標(biāo)注過(guò)程如圖1所示.

圖1 醫(yī)學(xué)超聲圖像的標(biāo)注Fig.1 Annotation of medical ultrasonic image
根據(jù)圖1醫(yī)學(xué)超聲圖像的邊緣標(biāo)注模型, 進(jìn)行醫(yī)學(xué)超聲圖像的多尺度邊緣檢測(cè)和二值擬合[14-15], 構(gòu)建醫(yī)學(xué)超聲圖像的灰度圖像分布矩陣為

(1)
對(duì)目標(biāo)超聲圖像進(jìn)行多尺度邊緣檢測(cè), 在兩個(gè)同質(zhì)區(qū)域(目標(biāo)和背景)內(nèi)[16], 提取醫(yī)學(xué)超聲圖像的局部灰度能量項(xiàng), 采用銳化模板匹配技術(shù)進(jìn)行醫(yī)學(xué)超聲圖像信息增強(qiáng)處理, 在銳化模板區(qū)域Ω中, 醫(yī)學(xué)超聲圖像I(x,y)被輪廓曲線Ki劃分為灰度區(qū)域R1和背景R2, 基于形變模型的分割方法構(gòu)建醫(yī)學(xué)超聲圖像的多尺度圖像分割模型G為

(2)
其中P(Ki)表示最大后驗(yàn)概率,μ表示醫(yī)學(xué)超聲圖像重建的確定系數(shù).構(gòu)建醫(yī)學(xué)超聲圖像的閉合曲線, 設(shè)置相關(guān)半徑偏移量φ(x,y), 可得醫(yī)學(xué)超聲圖像邊緣輪廓分布的水平集函數(shù)為C={(x,y)∈Ω:φ(x,y)=0}.在目標(biāo)區(qū)域被覆蓋的區(qū)域, 采用模板匹配方法進(jìn)行超聲圖像融合, 將圖像劃分為(Ω/16+1)×(G/16+1)個(gè)子塊, 為醫(yī)學(xué)超聲圖像多尺度邊緣檢測(cè)提供基礎(chǔ)數(shù)據(jù).
2 圖像多尺度邊緣特征提取
采用水平集量化特征分解方法[17]對(duì)醫(yī)學(xué)超聲圖像進(jìn)行多尺度邊緣特征提取, 構(gòu)造超聲圖像多尺度特征分解模型.本文構(gòu)建的醫(yī)學(xué)超聲圖像多尺度邊緣輪廓模型W為

(3)
其中H(z)和D(z)分別為Heaviside函數(shù)和Dirac函數(shù),N為圖像像素總節(jié)點(diǎn)數(shù).在分割輪廓上, 采用Rayleigh分布模型進(jìn)行區(qū)域像素融合, 計(jì)算公式為
O=WG+N.
(4)
結(jié)合醫(yī)學(xué)超聲圖像的邊緣檢測(cè)模板函數(shù)f1(x)和f2(x), 按照形狀輪廓的形變和邊緣模糊度, 可知f1(x)和f2(x)是模糊度變化的, 則超聲圖像的灰度像素水平集函數(shù)為

(5)
其中θ為每個(gè)等級(jí)包含的像素灰度特征量,L(φ)為邊緣輪廓曲線長(zhǎng)度約束項(xiàng),φ為每個(gè)樣本的灰度項(xiàng).采用網(wǎng)格模板匹配方法定義超聲圖像的目標(biāo)區(qū)域中心點(diǎn)[18-19].結(jié)合小波降噪方法得到超聲圖像降噪濾波輸出為
(6)
其中:Zl表示超聲圖像降噪濾波函數(shù);P(φ)為超聲圖像的多尺度邊緣分布正則項(xiàng),

(7)
式中ε為邊緣模糊特征分布項(xiàng).采用紋理像素集重建方法[20], 按照形狀輪廓的形變特征對(duì)各子帶圖像進(jìn)行二值化擬合, 計(jì)算公式為

(8)
從而可得每個(gè)樣本數(shù)據(jù)的多尺度邊緣特征為

(9)

3 算法設(shè)計(jì)
在提取得到多尺度邊緣特征的基礎(chǔ)上, 采用深度殘差網(wǎng)絡(luò)進(jìn)行超聲圖像的底層圖像信息融合處理, 以提高圖像的多尺度邊緣檢測(cè)能力, 進(jìn)而實(shí)現(xiàn)邊緣檢測(cè).
3.1 深度殘差網(wǎng)絡(luò)
深度殘差網(wǎng)絡(luò)是為解決卷積神經(jīng)網(wǎng)絡(luò)因卷積層的增加導(dǎo)致性能退化而提出的一種深度學(xué)習(xí)框架, 通常利用非線性的卷積層構(gòu)建殘差映射, 在卷積層中增加殘差學(xué)習(xí)單元.殘差學(xué)習(xí)單元負(fù)責(zé)將卷積層對(duì)網(wǎng)絡(luò)映射的學(xué)習(xí)轉(zhuǎn)換為直接對(duì)殘差映射的學(xué)習(xí), 使網(wǎng)絡(luò)運(yùn)行更順暢.本文的深度殘差網(wǎng)絡(luò)結(jié)構(gòu)如圖2所示.由圖2可見, 深度殘差網(wǎng)絡(luò)包括卷積層、 歸一化層、 激活層、 殘差學(xué)習(xí)單元、 池化層、 全連接層和輸出層.對(duì)于輸入神經(jīng)網(wǎng)絡(luò)的醫(yī)學(xué)超聲圖像, 深度殘差網(wǎng)絡(luò)首先在卷積層進(jìn)行卷積操作, 步長(zhǎng)設(shè)為1, 卷積核為3×3.殘差學(xué)習(xí)運(yùn)算后, 在池化層對(duì)圖像進(jìn)行平均池化操作, 窗口大小設(shè)為16×16.全連接層設(shè)置多個(gè)神經(jīng)元, 輸出多維向量[21].

圖2 深度殘差網(wǎng)絡(luò)結(jié)構(gòu)Fig.2 Structure of depth residual network

3.2 醫(yī)學(xué)超聲圖像底層信息融合
在上述提取醫(yī)學(xué)超聲圖像多尺度邊緣特征的基礎(chǔ)上, 進(jìn)行醫(yī)學(xué)超聲圖像底層圖像信息融合處理.根據(jù)深度殘差網(wǎng)絡(luò)原理, 分析深度殘差學(xué)習(xí)情況, 利用超聲圖像多尺度特征分解的深度殘差學(xué)習(xí)因子進(jìn)行醫(yī)學(xué)超聲圖像的底層信息融合.深度殘差網(wǎng)絡(luò)學(xué)習(xí)模型如圖3所示.
根據(jù)圖3醫(yī)學(xué)超聲圖像的多尺度邊緣檢測(cè)模型, 在深度殘差網(wǎng)絡(luò)下采用目標(biāo)邊緣標(biāo)記點(diǎn)跟蹤識(shí)別方法, 得到深度殘差學(xué)習(xí)算法計(jì)算公式為

圖3 醫(yī)學(xué)超聲圖像邊緣檢測(cè)的深度殘差網(wǎng)絡(luò)學(xué)習(xí)模型Fig.3 Deep residual network learning model for edge detection of medical ultrasonic image
Cs=DTeilc,
(10)
其中ei表示超聲圖像多尺度特征分解的深度殘差學(xué)習(xí)因子,lc表示殘差學(xué)習(xí)程度.根據(jù)深度殘差學(xué)習(xí)算法及多尺度邊緣特征信息的耦合, 進(jìn)行醫(yī)學(xué)超聲圖像底層信息融合, 其過(guò)程為

(11)
基于上述計(jì)算, 可實(shí)現(xiàn)醫(yī)學(xué)超聲圖像的底層圖像信息融合, 再根據(jù)特征分解結(jié)果進(jìn)行圖像的多尺度邊緣檢測(cè).
3.3 醫(yī)學(xué)超聲圖像的多尺度邊緣檢測(cè)算法
利用醫(yī)學(xué)超聲圖像底層圖像信息融合結(jié)果, 實(shí)現(xiàn)基于深度殘差網(wǎng)絡(luò)的醫(yī)學(xué)超聲圖像形狀特征檢測(cè), 得到多尺度邊緣檢測(cè)結(jié)果, 算法描述如下.
算法1醫(yī)學(xué)超聲圖像的多尺度邊緣檢測(cè)算法.
輸入: 根據(jù)醫(yī)學(xué)超聲圖像I(x,y), 構(gòu)建醫(yī)學(xué)超聲圖像邊緣輪廓分布的水平集, 并得到醫(yī)學(xué)超聲底層圖像融合信息Rh;
輸出: 醫(yī)學(xué)超聲圖像多尺度邊緣檢測(cè)結(jié)果.
初始化深度殘差網(wǎng)絡(luò)的參數(shù).
步驟1) 應(yīng)用醫(yī)學(xué)超聲底層圖像融合信息Rh, 并采用深度殘差網(wǎng)絡(luò)進(jìn)行超聲圖像多尺度平滑處理, 得到圖像的平滑處理輸出為

(12)
其中Kσ為醫(yī)學(xué)超聲圖像的邊緣尺度.
步驟2) 根據(jù)訓(xùn)練集進(jìn)行超聲圖像的多尺度邊緣檢測(cè), 訓(xùn)練得到樣本集M, 表示為

(13)
其中d表示邊緣系數(shù).
步驟3) 根據(jù)訓(xùn)練集進(jìn)行形狀特征檢測(cè), 得到醫(yī)學(xué)超聲圖像邊緣尺度分布函數(shù)為

(14)
其中ω為高斯核函數(shù).
步驟4) 結(jié)合深度殘差網(wǎng)絡(luò)進(jìn)行自適應(yīng)尋優(yōu)及全局均衡控制, 在深度殘差網(wǎng)絡(luò)下采用目標(biāo)邊緣標(biāo)記點(diǎn)跟蹤識(shí)別方法, 實(shí)現(xiàn)醫(yī)學(xué)超聲圖像多尺度邊緣檢測(cè), 檢測(cè)輸出為

(15)
步驟5) 算法結(jié)束.
根據(jù)上述步驟可實(shí)現(xiàn)超聲圖像的多尺度邊緣檢測(cè), 算法流程如圖4所示.
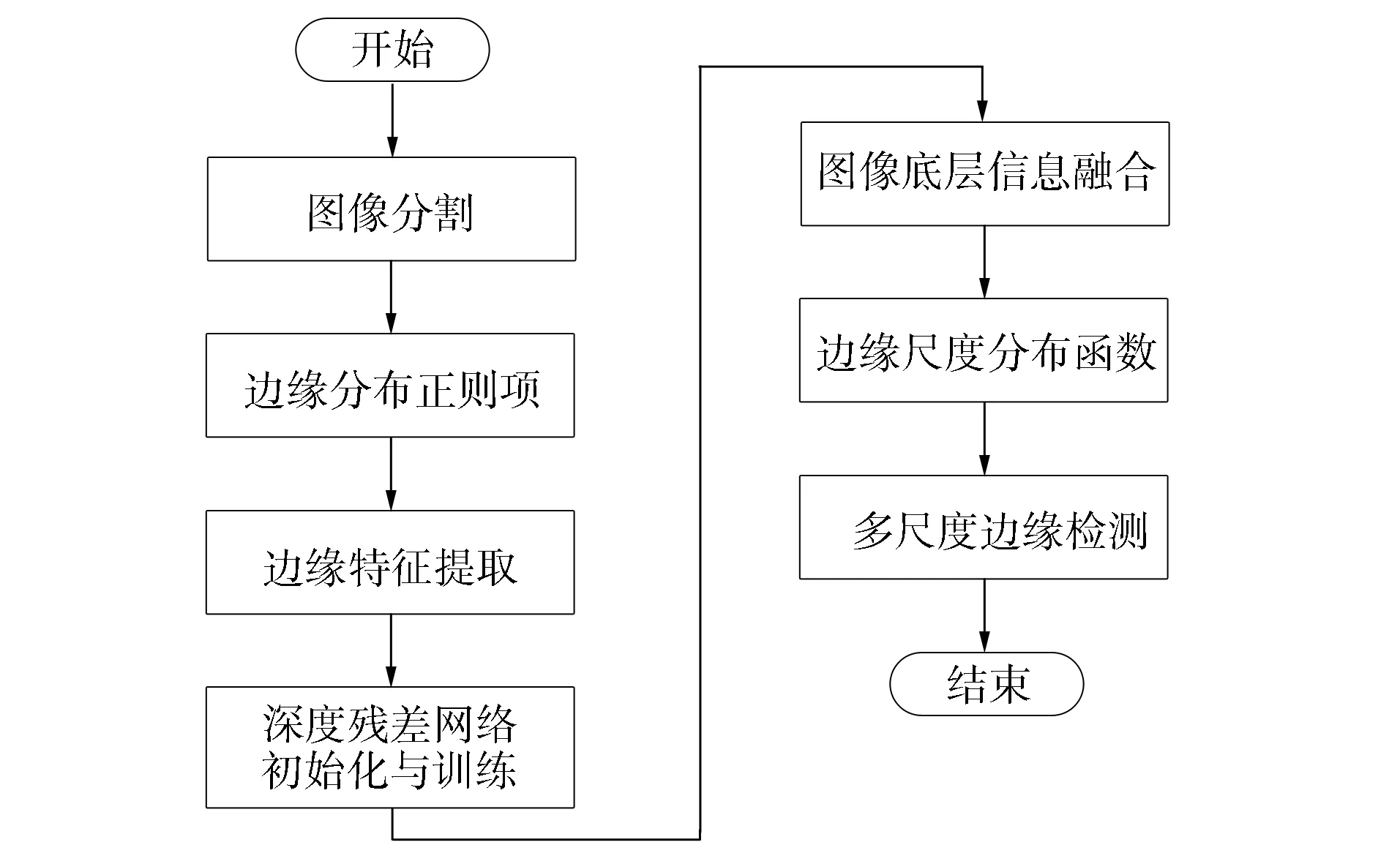
圖4 醫(yī)學(xué)超聲圖像多尺度邊緣檢測(cè)流程Fig.4 Multi-scale edge detection process of medical ultrasonic image
4 實(shí)驗(yàn)結(jié)果與分析
4.1 實(shí)驗(yàn)環(huán)境和數(shù)據(jù)集
為測(cè)試本文算法在實(shí)現(xiàn)醫(yī)學(xué)超聲圖像多尺度邊緣檢測(cè)中的性能, 對(duì)其進(jìn)行仿真實(shí)驗(yàn).實(shí)驗(yàn)采用MATLAB設(shè)計(jì). 圖像樣本采自于MEDLINE數(shù)據(jù)庫(kù), 為1 200萬(wàn)張臨床超聲圖像, 包括子宮肌瘤超聲圖像、 乳腺超聲圖像、 肝臟超聲圖像和肺部超聲圖像. 圖像像素初始分辨率設(shè)為540×400, 圖像邊緣檢測(cè)尺度分別設(shè)為30和50, 設(shè)λ1=1,λ2=1,μ=0.001, 模板分布為200×250, 網(wǎng)絡(luò)尺度系數(shù)ν=2.5.根據(jù)上述參數(shù)進(jìn)行超聲圖像多尺度邊緣檢測(cè).實(shí)驗(yàn)所用數(shù)據(jù)集信息列于表1.

表1 實(shí)驗(yàn)數(shù)據(jù)集信息
4.2 實(shí)驗(yàn)步驟
1) 構(gòu)建深度殘差網(wǎng)絡(luò)結(jié)構(gòu)模型, 輸入原始醫(yī)學(xué)超聲圖像;
2) 采用MATLAB設(shè)計(jì)實(shí)驗(yàn)環(huán)境, 模擬醫(yī)學(xué)超聲圖像分割及邊緣狀態(tài);
3) 采用深度殘差網(wǎng)絡(luò)進(jìn)行醫(yī)學(xué)超聲圖像多尺度邊緣檢測(cè), 輸出檢測(cè)結(jié)果;
4) 將本文算法實(shí)驗(yàn)結(jié)果與其他算法進(jìn)行對(duì)比, 驗(yàn)證本文算法的性能.
4.3 實(shí)驗(yàn)評(píng)價(jià)指標(biāo)
1) 分割精度. 圖像分割是完成邊緣檢測(cè)的基礎(chǔ)步驟, 因此對(duì)圖像分割精度進(jìn)行對(duì)比分析, 驗(yàn)證本文算法性能. 分割精度計(jì)算公式為

(16)
2) 特征提取準(zhǔn)確率. 在邊緣檢測(cè)前, 本文先進(jìn)行圖像邊緣特征提取. 為充分驗(yàn)證算法性能, 選取特征提取準(zhǔn)確率進(jìn)行分析, 計(jì)算公式為

(17)
3) 超聲圖像邊界中間斷區(qū)檢測(cè)性能. 由于超聲醫(yī)學(xué)圖像無(wú)明顯邊界, 因此易存在間斷區(qū), 通過(guò)對(duì)圖像邊界間斷區(qū)的檢測(cè), 可提升圖像邊緣檢測(cè)性能, 計(jì)算公式為

(18)
其中n表示圖像數(shù),ν表示學(xué)習(xí)尺度系數(shù).
4) 檢測(cè)邊緣圖像邊緣點(diǎn)查全性.邊緣點(diǎn)的檢測(cè)效果是反映檢測(cè)精度的最重要部分, 計(jì)算公式為

(19)
其中ψc表示邊緣點(diǎn)間斷區(qū)像素值,θ表示每個(gè)等級(jí)包含的像素特征量.
5) 時(shí)間開銷.在相同樣本數(shù)下不同檢測(cè)速度有不同的檢測(cè)時(shí)間, 即檢測(cè)效率, 因此將檢測(cè)時(shí)間設(shè)為一個(gè)評(píng)價(jià)指標(biāo), 計(jì)算公式為

(20)
其中R表示樣本總數(shù),Xi表示降噪結(jié)果取值,ρ表示像素點(diǎn)密度值.
6) 算法收斂性. 將本文算法與文獻(xiàn)[5,7-8,13]算法的收斂性進(jìn)行對(duì)比分析.
4.4 實(shí)驗(yàn)結(jié)果
將本文算法與文獻(xiàn)[5,7-8,13]算法的圖像分割精度進(jìn)行對(duì)比, 結(jié)果列于表2. 由表2可見: 本文算法的圖像分割精度平均值為94.4%, 文獻(xiàn)[8]算法的分割精度最低, 平均值僅為61.1%, 遠(yuǎn)低于本文算法; 文獻(xiàn)[5]和文獻(xiàn)[7]算法的圖像分割精度較接近, 但均不超過(guò)80%; 文獻(xiàn)[13]算法的平均精度為83.0%, 相對(duì)較高, 但低于本文算法11.4%. 因此本文算法圖像分割效果較好. 這是由于本文算法先標(biāo)注了圖像, 從而提高了分割精度. 不同算法特征提取準(zhǔn)確率對(duì)比結(jié)果列于表3. 由表3可見, 無(wú)論測(cè)試數(shù)據(jù)量大小, 本文算法的特征提取準(zhǔn)確率均在80%以上, 文獻(xiàn)[13]算法的提取準(zhǔn)確率較高, 為72.6%, 文獻(xiàn)[7]算法的準(zhǔn)確率最低, 未超過(guò)60%. 數(shù)據(jù)分析表明, 本文算法利用小波降噪方法對(duì)圖像進(jìn)行降噪濾波處理后提取邊緣特征, 提高了準(zhǔn)確率.

表2 不同算法的分割精度(%)對(duì)比

表3 不同算法的特征提取準(zhǔn)確率(%)對(duì)比
對(duì)圖1中醫(yī)學(xué)超聲原始圖像進(jìn)行圖像的自動(dòng)標(biāo)注, 為多尺度邊緣檢測(cè)劃分實(shí)驗(yàn)檢測(cè)范圍. 根據(jù)上述仿真環(huán)境及參數(shù)設(shè)定, 分別采用本文算法、 文獻(xiàn)[5,7-8,13]算法判斷圖像中存在的間斷區(qū), 檢測(cè)結(jié)果如圖5所示.

圖5 不同算法檢測(cè)邊界中存在的間斷區(qū)Fig.5 Different algorithms for detecting discontinuous area in boundary
由圖5可見: 文獻(xiàn)[5]和文獻(xiàn)[13]算法在進(jìn)行間斷區(qū)檢測(cè)時(shí), 能有效找到超聲圖像邊緣的間斷區(qū)域, 但其無(wú)法有效查詢到全部間斷區(qū)域; 文獻(xiàn)[7]、 文獻(xiàn)[8]算法在文獻(xiàn)[5]的基礎(chǔ)上查詢到多處“間斷區(qū)”, 但經(jīng)查證, 右半部分并非間斷區(qū)域, 故文獻(xiàn)[7]、 文獻(xiàn)[8]算法存在檢測(cè)精度低的問(wèn)題; 而本文算法在檢測(cè)圖像的間斷區(qū)時(shí), 具有較好的查全性. 這是由于本文算法在構(gòu)建圖像輪廓模式時(shí), 采用了Heaviside函數(shù)和Dirac函數(shù), 并考慮了形狀輪廓的形變和邊緣模糊度, 通過(guò)超聲圖像降噪濾波實(shí)現(xiàn)多尺度邊緣特征的檢測(cè), 為邊緣間斷區(qū)的檢索提供了有效依據(jù).
在上述實(shí)驗(yàn)結(jié)果基礎(chǔ)上, 分別采用本文算法、 文獻(xiàn)[5,7-8,13]算法進(jìn)行對(duì)比測(cè)試, 分析不同算法的邊緣點(diǎn)查全性, 結(jié)果如圖6所示. 由圖6可見: 本文算法的邊緣檢測(cè)效果在邊緣標(biāo)注上更清晰, 能較好地保持圖像的邊緣; 文獻(xiàn)[5,7-8,13]算法檢測(cè)效果相對(duì)不佳, 尤其是文獻(xiàn)[13]算法, 邊緣點(diǎn)數(shù)量最少, 最不明顯. 因此, 基于深度殘差網(wǎng)絡(luò)的醫(yī)學(xué)超聲圖像邊緣檢測(cè)可有效檢測(cè)到圖像中大量的邊緣點(diǎn), 具有較高的查全性.

圖6 不同算法仿真結(jié)果的邊緣點(diǎn)Fig.6 Edge points of simulation results of different algorithms
測(cè)試檢測(cè)的時(shí)間開銷, 不同算法的對(duì)比結(jié)果如圖7所示. 由圖7可見: 在不同的樣本數(shù)下, 本文算法所用的的時(shí)間開銷較短, 具有很好的適應(yīng)性和泛化能力; 其他對(duì)比算法隨著樣本數(shù)的增加, 檢測(cè)耗時(shí)均呈下降趨勢(shì), 文獻(xiàn)[8]的平均耗時(shí)相對(duì)較少, 但仍高于本文算法. 這是因?yàn)楸疚牟捎蒙疃葰埐罹W(wǎng)絡(luò)進(jìn)行圖像多邊緣尺度檢測(cè), 深度殘差網(wǎng)絡(luò)運(yùn)行效率高, 極大提高了檢測(cè)效率.

圖7 不同算法的時(shí)間開銷對(duì)比Fig.7 Time cost comparison of different algorithms
算法的收斂性越高表示算法性能越好, 不同算法的收斂性對(duì)比結(jié)果如圖8所示. 由圖8可見: 文獻(xiàn)[7]和文獻(xiàn)[8]算法的收斂性基本相同, 約為45%, 曲線平穩(wěn); 文獻(xiàn)[13]算法的收斂曲線有一定的波動(dòng)性, 為40%~50%, 平均值接近45%; 文獻(xiàn)[5]算法的收斂性最高, 為60%, 高于其他對(duì)比算法, 但遠(yuǎn)低于本文算法, 本文算法的收斂性高達(dá)82%. 因此, 本文融合圖像底層信息, 為超聲圖像多尺度邊緣檢測(cè)提供了必要的數(shù)據(jù)依據(jù), 提高了算法性能.

圖8 不同算法的收斂性對(duì)比Fig.8 Convergence comparison of different algorithms
綜上所述, 本文提出了一種基于深度殘差網(wǎng)絡(luò)的醫(yī)學(xué)超聲圖像多尺度邊緣檢測(cè)算法, 采用視覺特征檢測(cè)方法, 實(shí)現(xiàn)了醫(yī)學(xué)超聲圖像優(yōu)化設(shè)計(jì), 提高了醫(yī)學(xué)超聲圖像的視覺分辨能力.
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年12期)2018-08-26 06:03:48