水下爆炸物羽流跟蹤與定位技術仿真研究
2021-07-14 23:37:42張忠波胡光蘭
數字海洋與水下攻防 2021年3期
張忠波,雷 敏,胡光蘭
(中國船舶重工集團有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
水雷武器以隱蔽性好、打擊突然、易布難除、效費比高、能完成戰略任務等獨特優點,為歷代海戰兵家所情有獨鐘。在第一次世界大戰中,各交戰國共布放水雷31萬枚,擊沉各種艦船800余艘,占當時艦船損失總數的34%。在二戰中,各交戰國共布放水雷80余萬枚,擊沉各種艦船2 700余艘,占當時艦船損失總數的11%。二戰以來,號稱世界第一的美國海軍獨霸海洋,幾乎沒有敵手,然而對美軍艦艇造成最大損失的卻是水雷。據統計,從朝鮮戰爭以來,先后有20艘美艦遭到敵方的直接打擊而不同程度地損毀,其中15艘是被水雷擊傷的。以美國為代表的西方各海軍強國認為,水雷將給海軍的作戰行動帶來最為嚴重的影響,反水雷是海軍的核心作戰能力,必須對水雷戰給予高度重視。
在與水雷的對抗中,反水雷[1-2]始終處于一種不對稱的被動地位,始終是一項充滿不確定和危險的使命任務,西方各國海軍一直在不遺余力地發展反水雷裝備,試圖打破這種不對稱性。傳統檢測方法主要采用聲、光、磁等物理方法對水雷探測、識別和定位[3],只能從外觀和外殼材料上判斷是否為疑似水雷目標,無法確定其是否含有爆炸物,是否存在威脅等。
搭載化學痕跡檢測[4]的UUV系統可以根據水雷裝藥口滲出的爆炸物羽流特性搜尋和跟蹤到真實目標。本文的研究對象具有很強的特殊性,可供直接借鑒的文獻很少,在對類似羽流研究中,常見的研究建模方法主要有 Mie氏散射理論[5]、歐拉-拉格朗日方法[6]、圖像灰度[7]、CFD數值方法[8]等。
本文建立了水下爆炸物羽流跟蹤模型,搭建了計算仿真環境[9],模擬 UUV在水中環境對化學羽流追蹤及源頭定位的過程。模型可以通過更改流場信息、羽狀物擴散條件等方式模擬出不同形式的化學羽流,以模擬不同環境下的化學羽流運動,驗證UUV利用追蹤方法對不同環境下的化學羽流追蹤和定位的有效性,并保證較高的成功率。
1 仿真模型
1.1 仿真模型設計要求
在滿足實時性的要求下,集成UUV所處環境和UUV自身的仿真模擬于一個整體。要求如下:
1)通過求解物理方程,獲得對流場演化較為真實的模擬,實現流場在一定程度上隨機的變化,并滿足實時性要求。
2)實現化學羽狀流輸運較為真實的模擬,獲得化學羽狀物空間分布,并滿足實時性要求。基于羽狀物分布,提出合理的化學濃度模型。
3)UUV運動的模擬能夠較為真實地反應欠驅動載體在水動力作用下的運動特性,并滿足實時性要求。
4)UUV化學羽狀流自主追蹤任務規劃模塊不能直接獲取化學羽狀物釋放源頭的位置信息,而是通過傳感器的信息進行自主追蹤羽狀流,并確定化學源頭。化學源頭位置信息只用于羽狀物輸運的模擬。由此,可以檢驗自主追蹤的有效性。
5)實現較好的用戶交互功能。參數的設置方便并能立刻生效,輸出結果可視化。能實時監控UUV的狀態。
1.2 總體框架
本仿真模型主要分為2個大的框架:第1個框架用于模擬UUV所處的環境,包括流場實時計算模塊、化學羽狀流輸運模塊;第2個框架用于模擬UUV自身,包括基于行為的規劃模塊、運動模塊、載體操縱性模塊等。傳感器是UUV本體所搭載的用于感知環境的設備。傳感器模塊是2個框架之間的交互接口。
如圖1所示,流場實時計算模塊負責搜索區域內流場的演化,并得到流場的分布。化學羽狀流實時輸運模塊需要依賴這個流速分布計算羽狀物的分布。化學濃度模塊依據羽狀物的分布可以計算化學羽狀物濃度C。UUV的流速傳感器模塊依據流場分布計算出UUV當前位置處的流速Up,UUV的化學傳感器模塊依據化學濃度模塊計算出UUV當前位置的化學濃度Cp。UUV的規劃模塊依據流速Up、化學濃度Cp以及從位置傳感器獲得的當前位置p來進行化學羽狀流自主追蹤的任務規劃,并將目標艏向角ψ和目標速度值Vc傳遞給運動模塊。運動模塊生成適當的執行機構(舵槳)命令。執行機構的受力導入載體操縱性模塊進行計算,能夠更新UUV的狀態和位置。
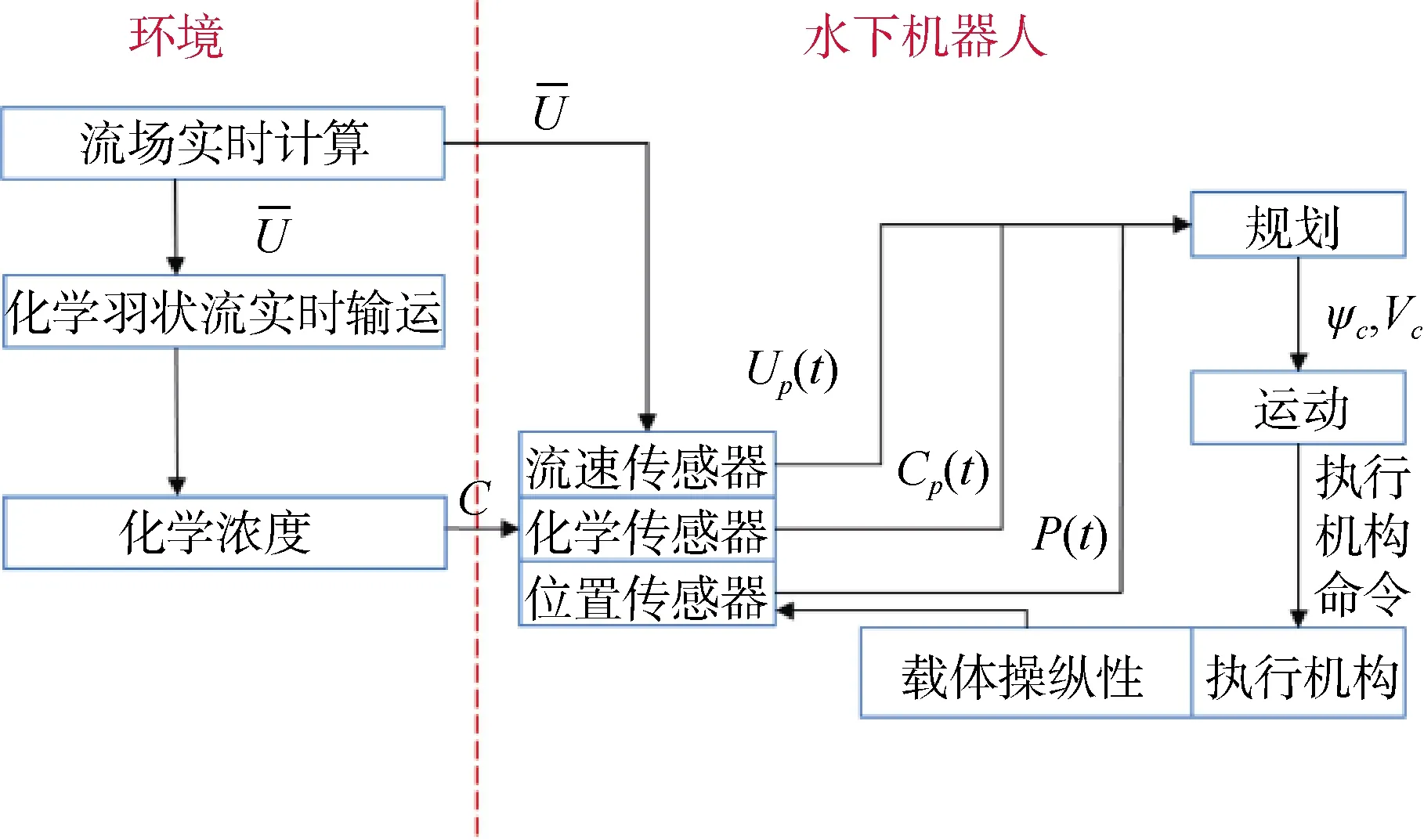
圖1 總體框架Fig. 1 Diagram of general framework
1.3 仿真模型設計
在計算和驗證本仿真模型的研究過程中,搭建了計算、仿真和現實軟件環境。采用串口通信程序用于接收采集DSP輸出的加速度計、陀螺和濃度傳感器的測量數據。通過定義串口讀中斷事件和串口中斷處理函數,實現了數據的自動采集,內部進行數值計算后,以MATLAB圖形方式實時顯示數據。
2 水中仿真實驗驗證
水中仿真實驗中,設定的搜索區域為150 m×100 m,源頭位置為(0,0),界面的右上角設定為(150 m,-50 m),左下角為(0,-50 m),如圖2所示。
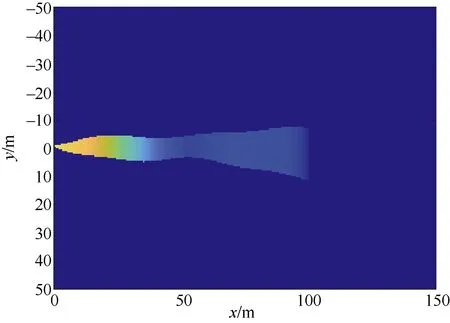
圖2 羽流仿真示意圖Fig. 2 Schematic diagram of plume simulation
實驗過程中,UUV的采樣周期為0.5 s,將搜索區域劃分為50×50個網格,規劃持續時間為5 s,丟失周期為20 s,保留40條流速/流向信息,人工勢場方法的伴隨網格為11×11,濃度閾值設定為0.2。
2.1 水中搜索行為仿真實驗
UUV首次探測到羽狀物信息的時刻,即成功探測到羽狀物,進而轉為追蹤羽狀物行為。在探測到羽狀物后,改進人工勢場法計算指令艏向角,UUV沿指令艏向角方向繼續進行羽狀物追蹤。
圖3所示為變化Z字形搜索行為的水中仿真搜索行為圖,源頭所在位置坐標為(0,0),UUV從位置(100,-50)開始在搜索區域內進行搜索羽狀物行為。曲線條表示的是UUV運動路徑,曲線條首部位置的箭頭表示的是 UUV當前時刻的艏向角,首部的箭頭表示的是當前時刻指令艏向角。

圖3 搜索羽狀物行為水中仿真圖Fig. 3 Simulation map of plume searching behavior
2.2 水中再發現行為仿真實驗
下面將對再發現水中仿真過程進行說明。UUV的初始位置為(150,50),初始時間為t=0。如圖4所示,UUV從初始位置開始進行搜索羽狀物行為,在t=149 s時刻,UUV在點(120,20)處第1次探測到羽狀物信息,轉為追蹤羽狀物行為,沿著改進人工勢場計算出的艏向角追蹤羽狀物。在追蹤過程中,UUV在t=183 s時在點(80,10)處丟失羽狀物信息,轉為再發現羽狀物行為。再發現過程中,UUV在搜索完最內層的近似三角形路徑后仍沒有探測到羽狀物,繼續在第2層路徑搜索,進行到將近一半路徑的時候,UUV在點(50,5)處探測到羽狀物信息,因此結束再發現行為,再次轉為追蹤行為。
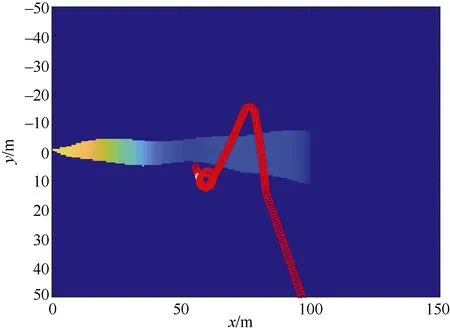
圖4 再發現行為水中仿真過程圖Fig. 4 Simulation process diagram of underwater rediscovery behavior
為了驗證再發現行為在水中仿真平臺上應用的可靠性,30次實驗結果統計:成功26次,失敗4次,成功率可達87%。經過陸地和水中仿真平臺的實驗驗證,本文提出的再發現羽狀物行為能適應不同的流場環境,丟失羽狀物后可以快速地再次探測到羽狀物,且具有較高的成功率,體現了搜索方法的自主性和智能性。
2.3 水中源頭確認行為仿真實驗
本節重點探討水中仿真平臺進行源頭確認行為的仿真驗證。水中仿真平臺的源頭位置為(0,0),圖 5為源頭確認行為水中仿真示意圖。圖中,在t=427 s時刻,UUV在進行源頭確認行為;該時刻計算得出的源頭概率值最大位置Ci,為(0,0.5);源頭概率值最大值為0.907 3,即圖中紅色區域。計算得出的源頭概率最大值超過了設定的閾值τ,因此UUV在紅色區域周圍進行源頭確認。UUV沿近似矩形路徑進行了2次確認,2次確認的結果相同,在源頭概率值最大位置Ci。上游5 m處沒有探測到羽狀物,而在下游5 m處探測到羽狀物,通過2次確認的結果可以確認源頭位置為(0,0)。進行了多次源頭確認的仿真實驗,統計結果如圖6所示。
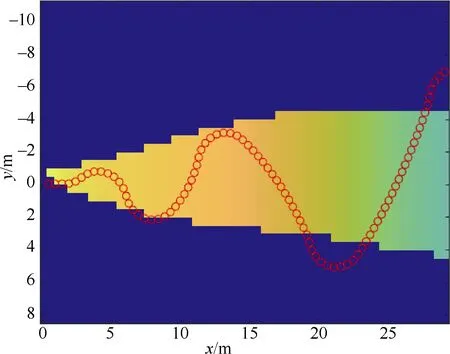
圖5 源頭確認行為水中仿真路徑圖Fig. 5 Path diagram of underwater simulation of source confirmation behavior
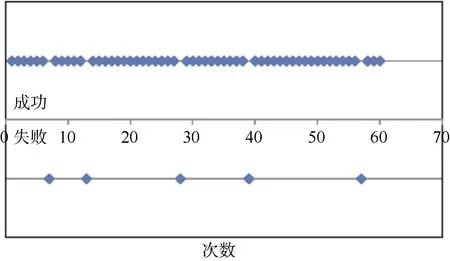
圖6 水中仿真源頭確認成功率示意圖Fig. 6 Schematic diagram of underwater simulation success probability on source confirmation
在仿真實驗過程中,將確認的源頭位置和真實源頭位置之間距離超過5 m定義為失敗。在統計的60次實驗中,成功55次,失敗5次,成功率約為91.7%,可以看出設計的源頭確認行為在水中仿真平臺具有較高的成功率,可以有效地提高源頭確認行為的工作效率,并準確地確認真實源頭位置。
2.4 水中追蹤行為仿真實驗
同樣選取了UUV追蹤過程中4個瞬間的截圖,通過對 4個瞬間的說明來驗證提出的追蹤羽狀物方法的可行性,見圖7-10。
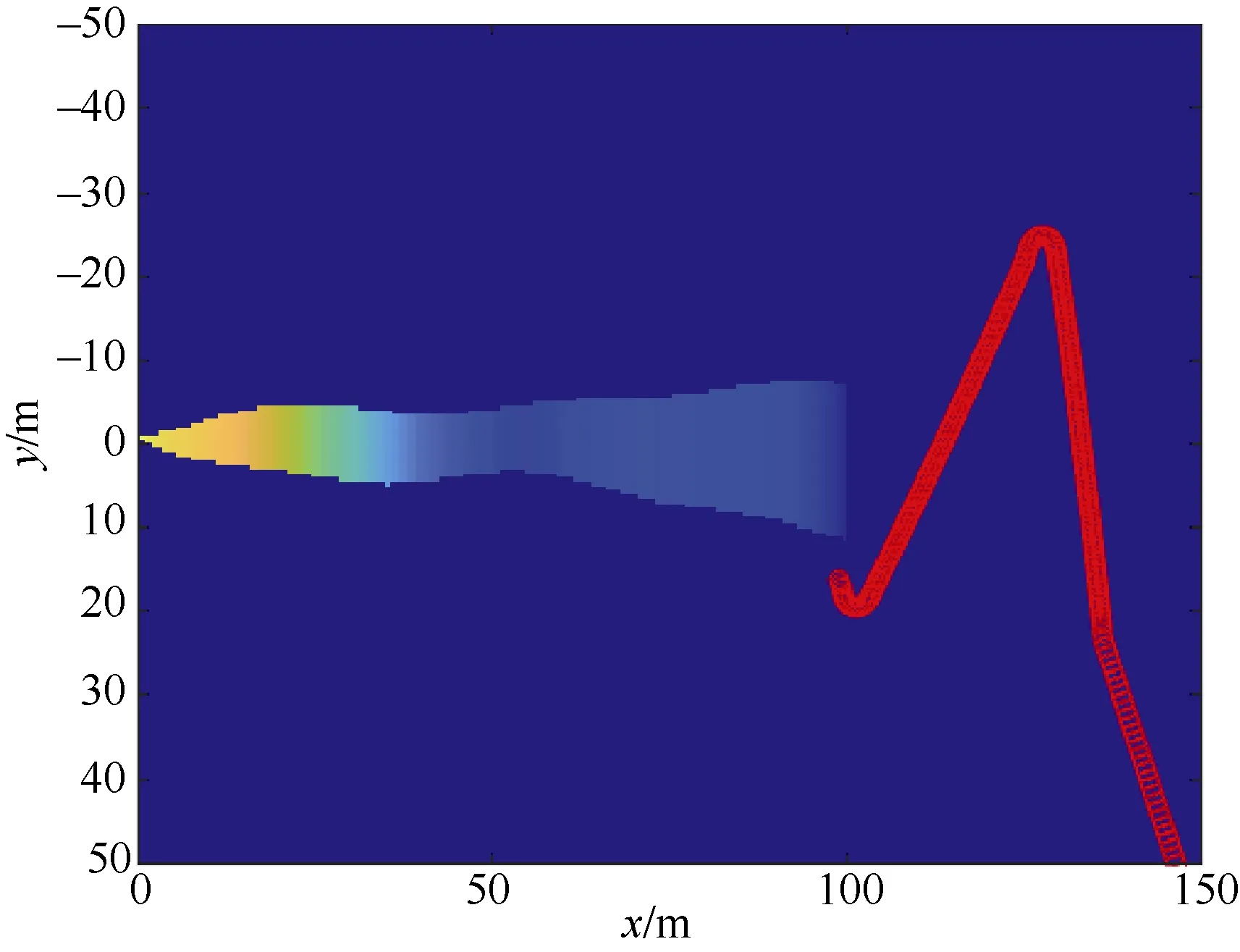
圖7 UUV大范圍搜索仿真圖Fig. 7 UUV search simulatin diagram
如圖7所示,UUV從初始位置出發,進行搜索羽狀物行為,圖中帶顏色區域為計算得出的源頭概率分布地圖。在初始時刻,UUV得到的羽狀物信息比較少,所以在大部分區域計算出的概率值都是相同的,只是在自己經過的區域附近概率值有所降低。如圖8所示,t=46 s時刻,UUV第1次探測到羽狀物信息,轉為追蹤羽狀物行為。圖中可以看出,在探測到羽狀物信息后,更新了源頭概率分布地圖,之前全部搜索區域都有可能存在源頭的情況消失了,相應的在UUV上游方向出現了面積比較小的深色區域。通過更新的源頭概率分布地圖,將可能存在源頭的區域縮減到很小的區域,通過得到羽狀物信息的增多,更新的源頭概率分布地圖會逐漸縮小到非常小的區域。圖9所顯示的是UUV利用改進人工勢場法進行追蹤羽狀物的過程。UUV以源頭概率分布地圖為基礎,利用改進人工勢場法計算出追蹤羽狀物的方向,然后沿著追蹤方向進行運動,直到確認源頭位置。圖10所示為UUV在進行源頭確認,圖中黑色點的位置為概率最大位置,可以看出通過羽狀物信息的增多,源頭概率分布地圖將可能存在源頭的位置縮減到非常小的區域,方便UUV進行源頭確認行為。通過仿真實驗的成功,可以驗證基于改進人工勢場的方法是比較高效的追蹤羽狀物算法,可以給UUV提供相對較優的追蹤軌跡。在多次仿真實驗中,該方法都能成功地找到源頭位置,說明該方法具有良好的穩定性。
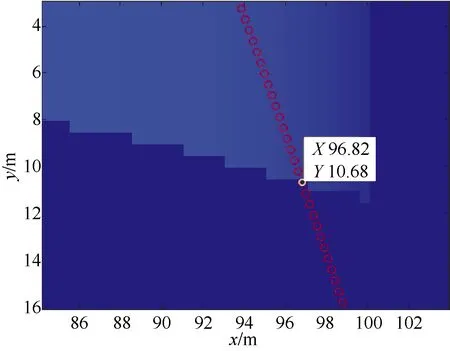
圖8 UUV剛探測到羽狀物示意圖Fig. 8 Schematic diagram of UUV initial detection of plume
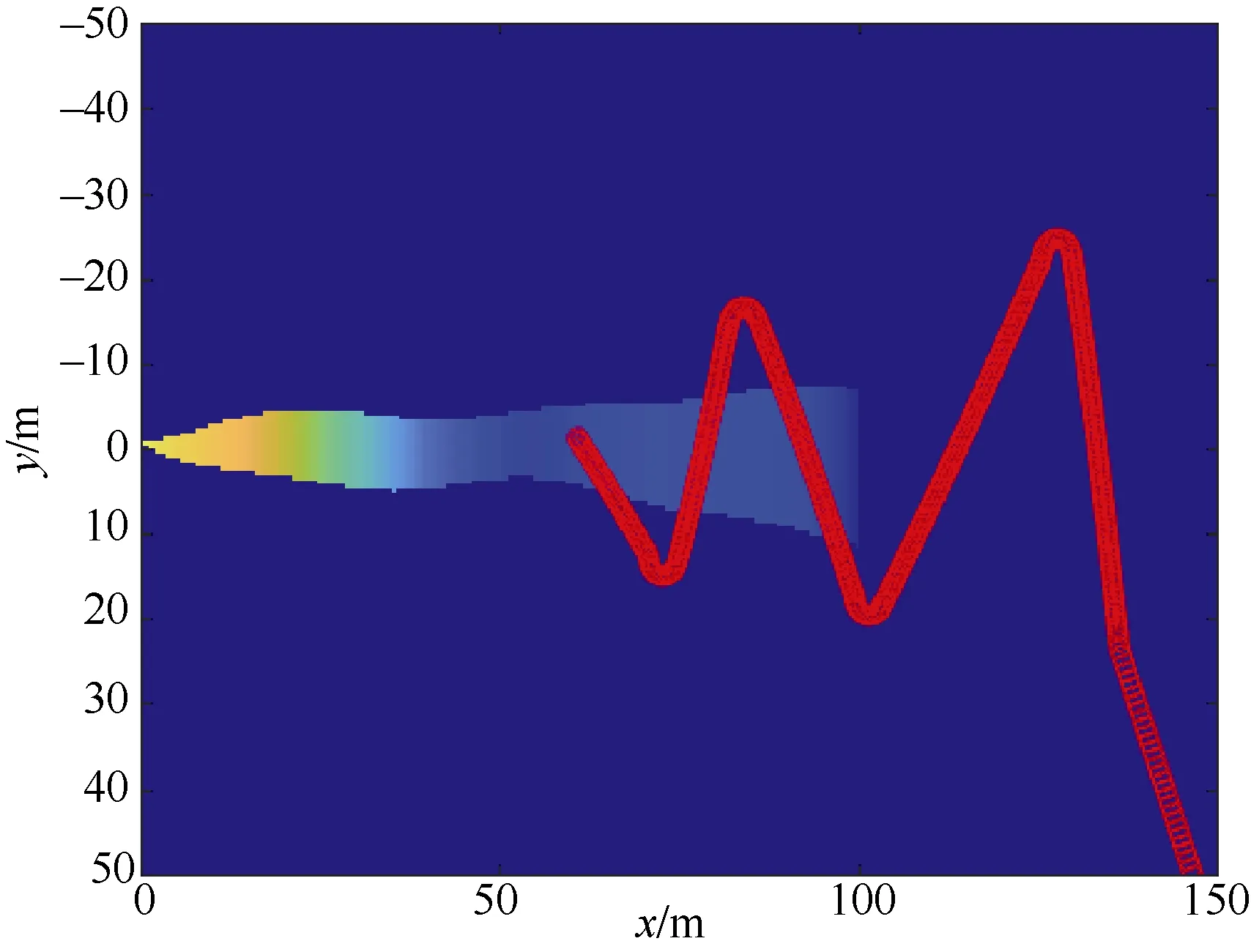
圖9 追蹤羽狀物過程仿真圖Fig. 9 Simulation diagram of tracking plume

圖10 源頭確認過程仿真圖Fig. 10 Simulation diagram of plume confirmation process
3 結束語
本文以水下爆炸物羽流跟蹤與定位為研究對象,建立了仿真模型。提出了仿真模型設計要求、建立了總體框架、完成了程序設計,并通過爆炸物水中搜索、再發現、源頭確認和追蹤等行為水中實驗仿真驗證了此模型的有效性。在后續的工作中,將開展水池和海洋真實場景測試,完善和校準羽流跟蹤與定位模型。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
科技知識動漫(2017年5期)2017-05-11 21:34:16
科技知識動漫(2017年4期)2017-04-15 22:24:55
科技知識動漫(2017年2期)2017-02-06 20:59:46
科技知識動漫(2016年10期)2016-10-18 20:35:00
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
