中小組立機器人焊接路徑規(guī)劃技術(shù)
2021-07-06 02:52:06喻天祥王冬梅成宇韜
造船技術(shù) 2021年3期
祁 超,喻天祥,劉 堅,王冬梅,成宇韜
(上海船舶工藝研究所,上海 200032)
0 引 言
目前全球造船業(yè)競爭激烈,日韓及歐美等的先進造船企業(yè)在造船技術(shù)、生產(chǎn)效率和產(chǎn)品質(zhì)量上處于領(lǐng)先地位,我國船舶工業(yè)的結(jié)構(gòu)調(diào)整轉(zhuǎn)型升級正面臨著嚴(yán)峻挑戰(zhàn),而諸如中小組立焊接裝備、管件智能加工裝備等核心技術(shù)一直被國外供應(yīng)商把持和封鎖,為突破國外裝備核心技術(shù)封鎖,補齊短板,需要開展核心技術(shù)的自主研發(fā)工作[1-2]。
船舶中小組立結(jié)構(gòu)件較為復(fù)雜,零件形式、尺寸各異,由于其無批量化加工的特點,因此在應(yīng)用焊接裝備進行中小組立焊接過程中,需要對每個零件進行路徑規(guī)劃。焊接路徑規(guī)劃技術(shù)作為焊接裝備的關(guān)鍵技術(shù)之一,目前國內(nèi)相關(guān)領(lǐng)域并沒有成熟適用的軟件。在工業(yè)領(lǐng)域中,通常使用示教/回放(Teaching/Playback)方法確定機器人運動路徑。然而,中小組立焊接作業(yè)相對復(fù)雜,傳統(tǒng)的機器人示教方法對操作人員要求高且難以滿足生產(chǎn)節(jié)點要求。離線編程(Offline Programming)是一種通過對工作環(huán)境及生產(chǎn)對象進行建模,在虛擬環(huán)境中利用規(guī)劃算法對機器人的工作路徑進行預(yù)先規(guī)劃的技術(shù)。使用離線編程技術(shù)生成焊接路徑,整個過程在虛擬環(huán)境中進行,可有效減少對生產(chǎn)的影響[3-4]。
1 機器人建模
六自由度通用型機器人結(jié)構(gòu)如圖1所示。
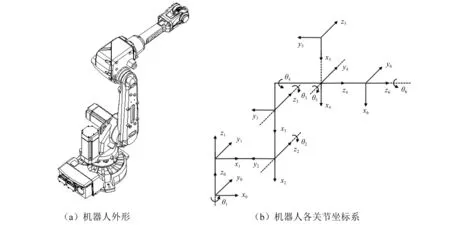
圖1 機器人結(jié)構(gòu)示例

(1)
式中:q=(θ1θ2θ3θ4θ5θ6) 。
機器人的D-H參數(shù)如表1所示。
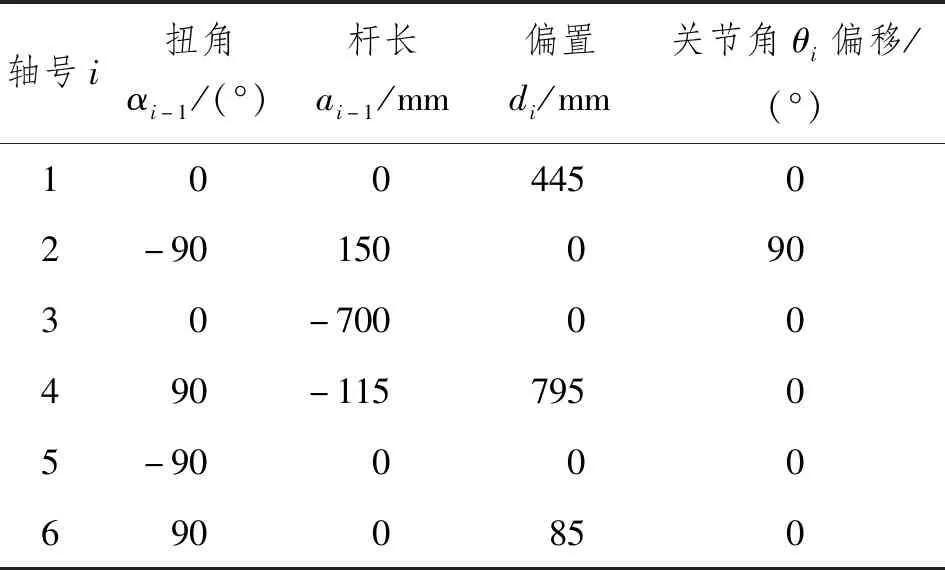
表1 機器人D-H參數(shù)
2 路徑搜索
2.1 RRT算法描述
快速搜索隨機樹(Rapidly-exploring Random Tree,RRT)[5]算法具有無須預(yù)處理且搜索速度快的特點,因此在高維空間中使用具有明顯優(yōu)勢[6]。通過RRT算法搜索構(gòu)型空間,并將所得狀態(tài)映射至工作空間進行約束檢查,從而確定最終路徑。RRT算法基本流程如下:
(1)建立隨機樹RT,將初始狀態(tài)qi設(shè)為RT的根節(jié)點。
(2)從機器人的構(gòu)型空間中隨機選取狀態(tài)qr。
(3)從RT中選出與qr最為接近的節(jié)點qn。
(4)計算qn到qr的方向qd,將qn沿qd擴展一段距離Δt后得到狀態(tài)qs。
(5)檢查qs是否滿足約束且無碰撞及關(guān)節(jié)超限,若是則將qs添加至RT。
(6)重復(fù)步驟(2)~(5)直至滿足目標(biāo)狀態(tài)qg或超過最大搜索次數(shù)N。
通過將焊接路徑根據(jù)路徑點分段并對每段路徑應(yīng)用RRT算法即可得出完整的運動路徑。
2.2 路徑點設(shè)置
對于焊接路徑通常會設(shè)置如下路徑點:
(1)接近點:將機器人從空間位置移動至進槍點。
(2)離開點:將機器人退槍點移動至安全的空間位置。
(3)進槍點:調(diào)整焊槍姿態(tài)準(zhǔn)備焊接。
(4)退槍點:將焊槍撤離焊縫。
(5)焊接起終點:焊縫實際焊接部分的起終點。
圖2為路徑點設(shè)置示例。
2.3 約束檢查
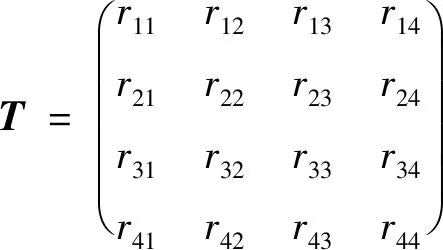
位姿矩陣T也可以通過將機器人末端執(zhí)行器先繞X軸旋轉(zhuǎn)γ角,接著繞Y軸旋轉(zhuǎn)β角,再繞Z軸旋轉(zhuǎn)α角,最后將末端執(zhí)行器沿坐標(biāo)系的x、y、z軸分別偏移x、y、z得到。因此T可以使用式(3)表示,將矩陣中的各個元素按行列記為rij得
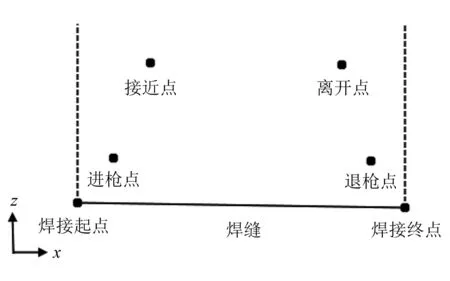
圖2 路徑點設(shè)置示例
到式(4)。

(3)
(4)
根據(jù)式(3)和式(4),可分別獲得旋轉(zhuǎn)角α、β、γ的值為
α=arctan 2(r21,r11)
(5)
(6)
γ=arctan 2(r32,r33)
(7)
因此,經(jīng)過變換可以得到狀態(tài)qs在工作空間下的狀態(tài)X[7]為
X=T(qs)=(xyzαβγ)
(8)
通常在焊接路徑中對于機器人的末端姿態(tài)存在不同的約束,對于末端姿態(tài)的6個分量分別定義約束檢測函數(shù)cx、cy、cz、cα、cβ、cγ,若分量i滿足約束則檢測函數(shù)ci(i)返回0,否則返回誤差值。
使用式(9)計算誤差e:
e=cx(X)+cy(X)+cz(X)+cα(X)+cβ(X)+cγ(X)
(9)
若e小于等于檢查精度ε則狀態(tài)qs滿足約束。
路徑點類型不同其約束條件也不盡相同:安全點通常存在位置約束,而焊接過程點通常同時存在位置及姿態(tài)約束。
3 仿真驗證
為檢驗路徑規(guī)劃效果,使用Python實現(xiàn)規(guī)劃程序,并在1臺配置2.2 GHz主頻CPU、4G內(nèi)存的筆記本計算機上進行仿真測試。在第1次試驗中,機器人從初始關(guān)節(jié)狀態(tài)qi=(0 0 0 0 0 0)移動至目標(biāo)狀態(tài)qg=(30 0 30 0 0 45),途中沒有設(shè)置任何障礙物,機器人生成較為平滑的路徑并成功抵達(dá)終點。在第2次試驗中,機器人同樣從初始關(guān)節(jié)狀態(tài)qi=(0 0 0 0 0 0)移動至目標(biāo)狀態(tài)qg=(30 0 30 0 0 45),途中設(shè)置了1個50 mm×100 mm×100 mm的立方體障礙物,機器人在檢測到碰撞后終止原路徑方向,并通過其他分支抵達(dá)終點。2次試驗的生成路徑如圖3所示,圖中所使用的坐標(biāo)系為機器人的工作空間,軌跡線為機器人末端所經(jīng)過的坐標(biāo)點。
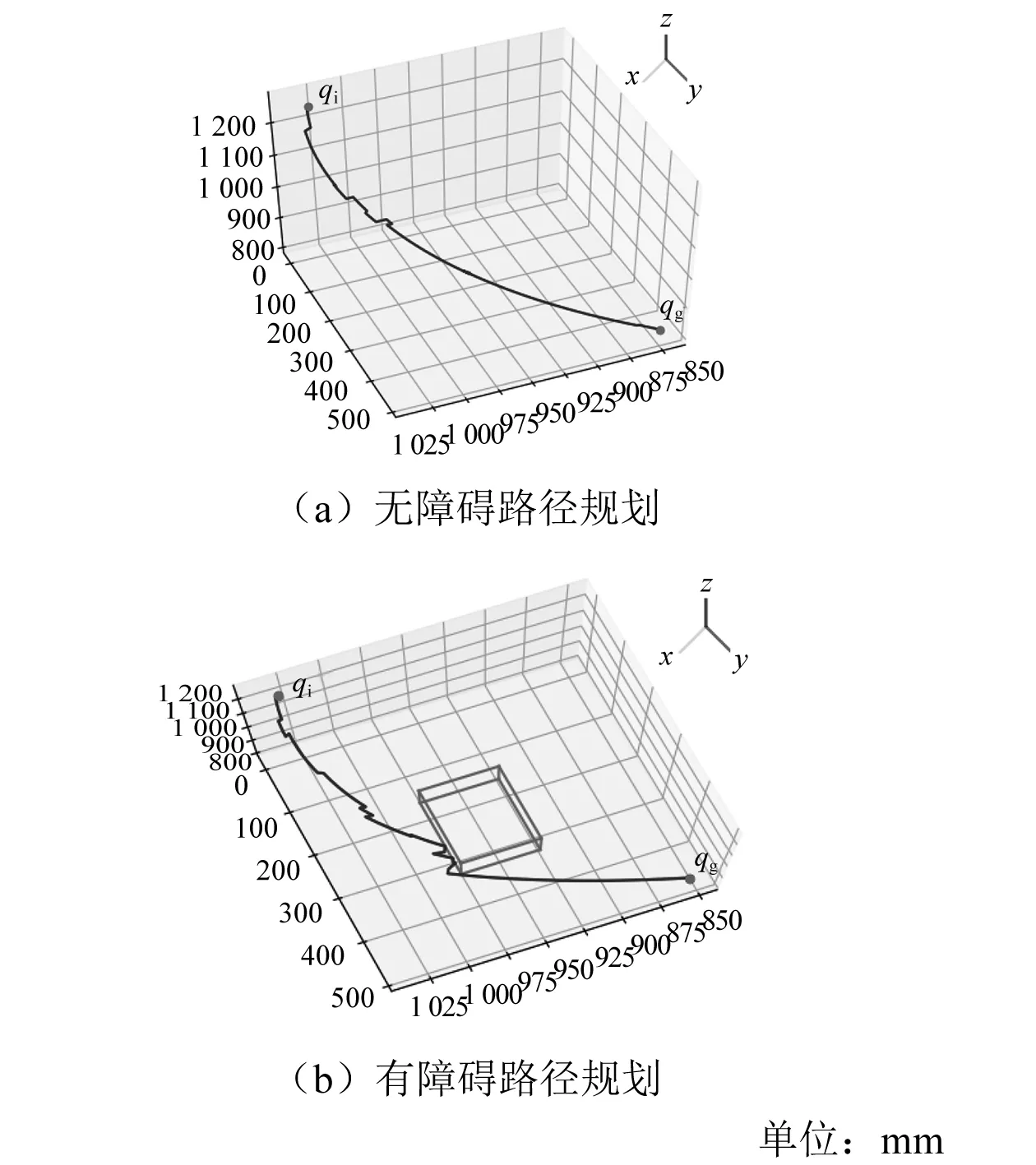
圖3 有無障礙物路徑規(guī)劃對比
4 結(jié) 語
中小組立工件具有形式多變、焊縫眾多的特點,傳統(tǒng)的示教方式操作復(fù)雜、對人員要求高。提出一種使用離線編程技術(shù)規(guī)劃焊接路徑的方法,通過使用RRT算法能夠快速找出可行路徑,結(jié)合路徑點的設(shè)置可對每段路徑分別指定約束條件,不僅保證在焊接前后機器人能盡快過渡,而且滿足機器人焊接的工藝要求。如何快速、有效地確定約束條件將是后續(xù)研究的重點。
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
建材發(fā)展導(dǎo)向(2021年6期)2021-06-09 05:57:08
金屬加工(熱加工)(2020年12期)2020-02-06 05:59:00
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造業(yè)自動化(2017年2期)2017-03-20 14:26:13
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
中國工程咨詢(2016年4期)2016-02-14 07:28:28
沈陽醫(yī)學(xué)院學(xué)報(2015年1期)2015-12-27 13:44:40
醫(yī)學(xué)教育管理(2015年3期)2015-12-01 06:43:16
