基于智能型全站儀的火箭撬滑軌平面平順性測控技術(shù)研究
2021-07-06 10:41:58羅朱檸
鐵道建筑 2021年6期
羅朱檸
中鐵十一局集團(tuán)第三工程有限公司,湖北十堰430301
火箭撬滑軌是航空航天以及武器研發(fā)領(lǐng)域不可或缺的關(guān)鍵設(shè)備。其核心技術(shù)在于要達(dá)到百萬分之一的軌道直線性相對精度[1],在安裝測控過程中涉及軌道的精密加工、焊接、焊縫超聲波探傷、軌道直線度測量、軌道平面和高程位置的調(diào)整等技術(shù)[2]。而其中的軌道直線度精密測量和軌道平面及高程位置的精確調(diào)整,在世界范圍內(nèi)都屬于高難度的測控技術(shù),如今能夠建造火箭撬軌道的國家只有美國、英國、俄羅斯、法國和中國[3]。
滑軌的精密測控是火箭撬滑軌建造期的關(guān)鍵技術(shù)之一。為保證滑軌的高平順性,滑軌測控的絕對位置精度和相對位置精度都應(yīng)達(dá)到0.2 mm[4],這對常用的測量設(shè)備和方法而言都是一種考驗(yàn)。在已建成的火箭撬滑軌工程中,有使用激光跟蹤儀測控滑軌平順性的成功經(jīng)驗(yàn)[5],然而激光跟蹤儀價格昂貴,且對使用環(huán)境和條件限制頗多[6]。瑞士徠卡公司生產(chǎn)的TS60智能型全站儀,其水平方向測量的標(biāo)稱精度為0.5″,距離測量的標(biāo)稱精度為0.6 mm±1μm,是目前精度最高的全站儀,已經(jīng)在高速鐵路精密工程測量領(lǐng)域廣泛應(yīng)用。在高速鐵路軌道板和軌道平順性測量中使用高精度智能型全站儀進(jìn)行自由設(shè)站測量,其設(shè)站精度可達(dá)到亞毫米級[7],因此智能型全站儀有望應(yīng)用于火箭撬滑軌的平順性精密測控。
本文在西南交通大學(xué)測量試驗(yàn)場和內(nèi)蒙古一處基地已建成的9 km火箭撬滑軌上進(jìn)行多次測量試驗(yàn),探究使用高精度智能型全站儀在火箭撬滑軌兩側(cè)建立平面控制網(wǎng),并采用多控制點(diǎn)后方邊角交會測量的方法,能否達(dá)到火箭撬滑軌平面平順性測控的精度要求,并驗(yàn)證此方法進(jìn)行軌道平面平順性測控的效率。
1 全站儀邊角后方交會測量設(shè)站精度
在西南交通大學(xué)測量試驗(yàn)場中布設(shè)了8個控制點(diǎn)組成的平面控制網(wǎng),控制點(diǎn)成對布設(shè),點(diǎn)對內(nèi)點(diǎn)間橫向間距為60 m,點(diǎn)對間縱向間距為80 m,如圖1所示。
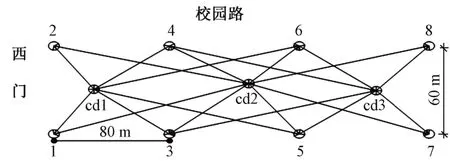
圖1 西南交通大學(xué)測量試驗(yàn)場控制網(wǎng)測量網(wǎng)形示意
為提高控制網(wǎng)的測量精度,8個控制點(diǎn)用3個自由測站進(jìn)行邊角聯(lián)測構(gòu)網(wǎng),其中控制網(wǎng)兩端的兩個自由測站(圖1中的cd1、cd3兩個測站)分別位于本測站的第一對和第二對控制點(diǎn)的中間位置,并僅測量靠近本測站的3對控制點(diǎn);中間的自由測站(圖1中cd2測站)對全部4對控制點(diǎn)進(jìn)行測量。
為了能夠比較利用上述平面控制網(wǎng)進(jìn)行多次后方交會測量得到的設(shè)站點(diǎn)坐標(biāo)的重復(fù)性較差情況,在控制網(wǎng)的中心位置(自由測站點(diǎn)cd2)安置了一個強(qiáng)制對中樁(圖2),因此cd2點(diǎn)既是控制網(wǎng)測量時的自由測站點(diǎn),又是后續(xù)驗(yàn)證后方邊角交會測量精度的設(shè)站點(diǎn)。

圖2 強(qiáng)制對中樁
進(jìn)行測量試驗(yàn)時,在各控制點(diǎn)上使用穩(wěn)定的木質(zhì)腳架架設(shè)精密棱鏡,棱鏡基座須精密整平。棱鏡中心即作為平面控制點(diǎn),整個試驗(yàn)過程中8個控制點(diǎn)的棱鏡位置保持不動,僅隨測站位置的變化轉(zhuǎn)動相關(guān)棱鏡的方向,因此整個試驗(yàn)測量過程中沒有對中誤差的影響。
為保證測量試驗(yàn)的精度,試驗(yàn)選擇在夜間進(jìn)行,按照圖1所示網(wǎng)形對8個控制點(diǎn)進(jìn)行自由測站測量,建立平面控制網(wǎng)。測量過程每個測站的水平方向和距離觀測限差嚴(yán)格按照TB 10601—2009《高速鐵路工程測量規(guī)范》中的二等平面精度[8]要求執(zhí)行。外業(yè)測量完成后,以中間測站的全站儀站心(圖1中cd2點(diǎn))為坐標(biāo)原點(diǎn)對平面控制網(wǎng)進(jìn)行自由網(wǎng)平差,網(wǎng)平差精度達(dá)到規(guī)范要求后,將站心坐標(biāo)系下的平差坐標(biāo)作為各個控制點(diǎn)的最終坐標(biāo)。再利用這8個控制點(diǎn)的最終坐標(biāo),在強(qiáng)制對中樁(圖1中cd2點(diǎn))上進(jìn)行3次獨(dú)立的邊角后方交會測量,每次測量間隔10 min左右,并且每次設(shè)站測量前均要求重新整平全站儀。最后統(tǒng)計設(shè)站點(diǎn)坐標(biāo)及其精度,3次設(shè)站測量的結(jié)果見表1。
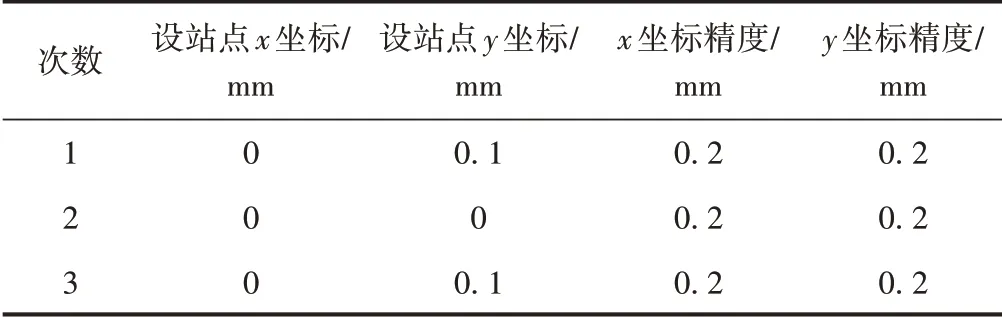
表1 3次邊角后方交會測量設(shè)站點(diǎn)坐標(biāo)及精度
由表1可知:3次測量設(shè)站點(diǎn)的坐標(biāo)分量較差均小于0.1 mm,設(shè)站點(diǎn)的x、y坐標(biāo)中誤差也均小于0.2 mm,這說明使用智能型全站儀,在火箭撬滑軌兩側(cè)建立二等平面控制網(wǎng),并采用多控制點(diǎn)后方邊角交會測量的方法,對火箭撬滑軌進(jìn)行平面位置測控,其精度可以達(dá)到火箭撬滑軌的精度要求(0.2 mm)。因此該方法可以應(yīng)用于火箭撬滑軌的平面平順性精密測控。
2 基于智能型全站儀的滑軌平面平順性測控方案及其現(xiàn)場試驗(yàn)情況
為進(jìn)一步驗(yàn)證基于智能型全站儀進(jìn)行火箭撬滑軌平面平順性測控的可行性,在內(nèi)蒙古一處基地長度為9 km的火箭撬滑軌上進(jìn)行現(xiàn)場測量試驗(yàn),試驗(yàn)段位于滑軌起點(diǎn)附近。這是一段軌道平面平順性已經(jīng)經(jīng)過測控并滿足要求的滑軌,但是在經(jīng)過多次的火箭撬試驗(yàn)之后可能有些段落的軌道平順性已經(jīng)發(fā)生變化而達(dá)不到要求。本次現(xiàn)場測量試驗(yàn)的目的是采用本文的方法測量一段50 m左右的軌道,之后觀察測量結(jié)果是否能夠滿足相鄰測點(diǎn)橫向偏距之差小于0.2 mm的平面平順性要求,以及觀察各個測站的設(shè)站精度能否滿足x、y坐標(biāo)分量中誤差小于0.2 mm的要求。
2.1 現(xiàn)場平面基準(zhǔn)網(wǎng)布設(shè)情況及其起算數(shù)據(jù)
測量試驗(yàn)前,在滑軌兩側(cè)的地面上布設(shè)平面控制網(wǎng),控制點(diǎn)成對布設(shè),點(diǎn)對內(nèi)點(diǎn)間橫向間距、縱向間距均為80 m,共布設(shè)7對控制點(diǎn),布設(shè)的平面控制網(wǎng)如圖3所示。仿照高速鐵路CPⅢ控制點(diǎn)的埋設(shè)方法,先在選好的點(diǎn)位埋設(shè)觀測墩,然后在觀測墩頂部埋入預(yù)埋件,再在預(yù)埋件中插入棱鏡桿,最后在棱鏡桿上安裝精密棱鏡,棱鏡中心位置即為控制點(diǎn)位置。圖3中C03—C11點(diǎn)是火箭撬滑軌的基準(zhǔn)樁,位于承軌臺東側(cè)約0.1 m處,相鄰基準(zhǔn)樁縱向間距約為60 m,由中國科學(xué)院測量與地球物理研究所建立并施測,具有很高的三維點(diǎn)位精度。本文的平面控制網(wǎng)測量時要求聯(lián)測這些基準(zhǔn)樁,并把這些基準(zhǔn)樁作為滑軌平面控制網(wǎng)平差計算的起算點(diǎn),以便將平面控制網(wǎng)坐標(biāo)統(tǒng)一到火箭撬滑軌工程獨(dú)立坐標(biāo)系中。
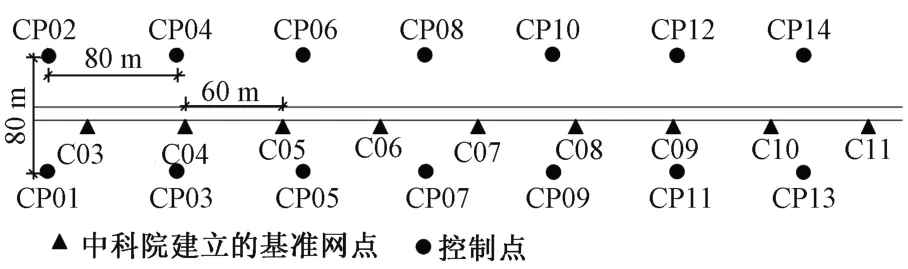
圖3 現(xiàn)場試驗(yàn)滑軌平面控制網(wǎng)布設(shè)情況
2.2 基于智能型全站儀的滑軌平面平順性測控方案
首先是將智能型全站儀通過工裝夾具直接架設(shè)在滑軌上,然后向兩側(cè)的至少8個平面控制點(diǎn)進(jìn)行邊角后方交會測量,之后計算出全站儀中心的平面坐標(biāo)及其精度,而通過工裝夾具的設(shè)計使全站儀的中心即為滑軌的中心,據(jù)此測量各處滑軌中心的坐標(biāo),最后通過相鄰點(diǎn)滑軌中心的坐標(biāo),分析滑軌的平面平順性。
為了將全站儀穩(wěn)定地架設(shè)在滑軌上,并且使全站儀中心與滑軌中心在同一鉛垂線上,本文設(shè)計了一種將全站儀安裝在滑軌上的專用工裝夾具,如圖4所示。夾具內(nèi)側(cè)面的兩個螺栓用于把夾具固定在滑軌上,并使其頂部的基座中心與軌道中心一致;夾具外側(cè)的兩個螺栓用于防止全站儀裝在夾具上意外傾倒;夾具頂部的三個螺栓用于整平夾具。使用此工裝夾具,可以將全站儀直接架設(shè)在滑軌上待測量的各個位置。
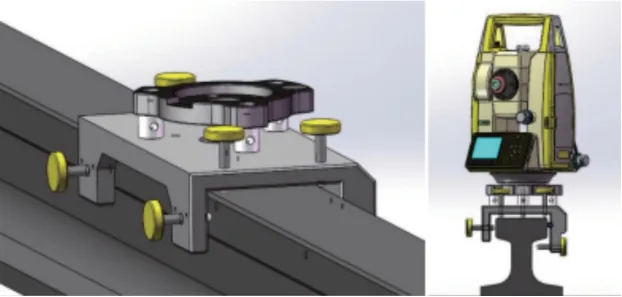
圖4 全站儀專用工裝夾具示意
為保證現(xiàn)場測量試驗(yàn)的精度,本次測量試驗(yàn)仍在夜間進(jìn)行。采用自由測站邊角交會法,以中國科學(xué)院測量與地球物理研究所建立的基準(zhǔn)點(diǎn)C03—C11點(diǎn)作為已知控制點(diǎn),對滑軌平面控制網(wǎng)進(jìn)行建網(wǎng)測量,獲得各個控制點(diǎn)在滑軌工程獨(dú)立坐標(biāo)系下的坐標(biāo)。
之后依據(jù)滑軌兩側(cè)的平面控制網(wǎng),使用工裝夾具把智能型全站儀直接架設(shè)在火箭撬滑軌上的某一個測點(diǎn)[9],采用多控制點(diǎn)后方邊角交會測量的方法,測量試驗(yàn)段滑軌每個扣件處的平面坐標(biāo),每次測量需要后視測站前后各2對(共8個)的平面控制點(diǎn),如圖5所示,并記錄每一扣件處的設(shè)站坐標(biāo)及精度。
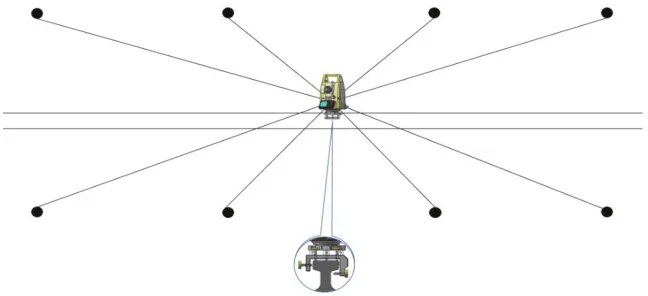
圖5 多控制點(diǎn)后方邊角交會測量滑軌平面坐標(biāo)原理示意
2.3 現(xiàn)場試驗(yàn)測量結(jié)果及其數(shù)據(jù)分析
本次現(xiàn)場試驗(yàn)測量了滑軌第13—15號三片梁共計45個扣件,每一扣件處設(shè)站點(diǎn)橫向、縱向坐標(biāo)中誤差(即設(shè)站精度)統(tǒng)計結(jié)果見圖6。可知,所有測站測量的x、y坐標(biāo)中誤差均不超過0.2 mm,滿足火箭撬滑軌平面平順性測控的精度要求。
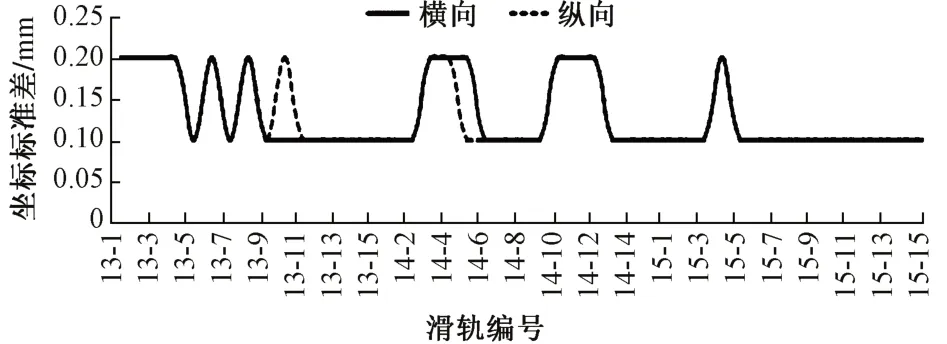
圖6 現(xiàn)場試驗(yàn)各個測站設(shè)站精度統(tǒng)計結(jié)果
由于軌道工程獨(dú)立坐標(biāo)系的y軸為軌道的縱向,x軸為垂直于軌道的橫向,因此對相鄰兩個扣件處全站儀站心坐標(biāo)中的x坐標(biāo)值求差,即得到相鄰扣件處滑軌的橫向偏距較差。
本次測量的這段軌道的橫向偏距較差見表2。火箭撬滑軌平面相對平順性精度要求是相鄰兩個測點(diǎn)的橫向偏距較差應(yīng)不超過±0.2 mm。由表2可知,這段滑軌大部分位置(占77.3%)的相對平順性能夠滿足要求,個別位置相對平順性略差,橫向偏距較差最大值為0.6 mm。
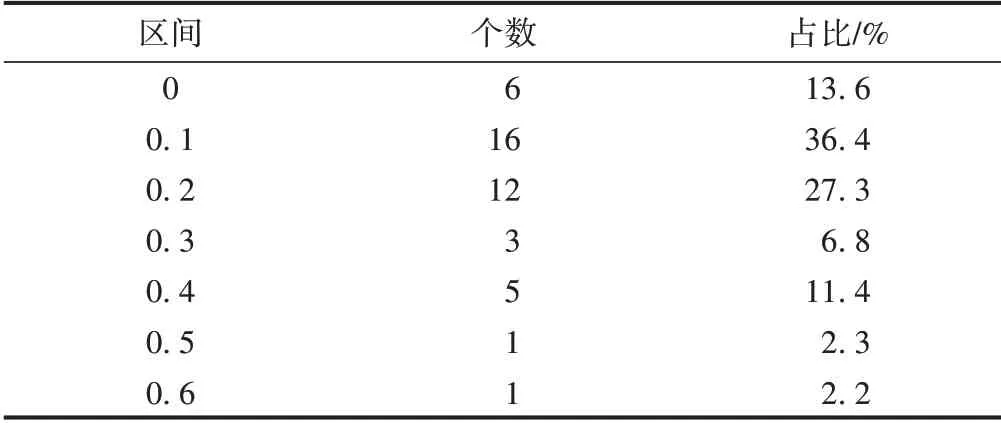
表2 現(xiàn)場試驗(yàn)相鄰扣件處滑軌橫向偏距較差 mm
3 結(jié)論
1)使用高精度智能型全站儀,在火箭撬滑軌兩側(cè)建立橫縱向間距均為80 m左右的平面控制網(wǎng),并采用多控制點(diǎn)后方邊角交會測量法,對軌道平面直線度進(jìn)行測量。該方法能夠達(dá)到火箭橇滑軌調(diào)軌的精度要求,即軌道上各個測點(diǎn)的平面坐標(biāo)分量中誤差小于±0.2 mm和同一個測點(diǎn)多次獨(dú)立測量的坐標(biāo)分量較差小于0.2 mm的重復(fù)性測量較差要求。
2)采用本文方法進(jìn)行滑軌平面坐標(biāo)測量,測量一個測點(diǎn)需要150~180 s,測量速度主要取決于操作人員的熟練程度。耗時的工作主要在于全站儀專用工裝夾具的整平以及后方交會測量時人為瞄準(zhǔn)各個控制點(diǎn)的過程。所以,本方法在后續(xù)實(shí)際應(yīng)用中提高測量效率的途徑主要有:①進(jìn)一步改進(jìn)工裝夾具的整平方式以減少整平時間;②開發(fā)能夠控制智能型全站儀進(jìn)行多控制點(diǎn)后方邊角交會自動測量的手機(jī)端APP應(yīng)用程序,以縮減全站儀瞄準(zhǔn)各個控制點(diǎn)及其測量的時間。
3)本方法的測量精度主要依賴于滑軌平面控制網(wǎng)的測量精度和全站儀工裝夾具的整平精度及全站儀的觀測精度。平面控制網(wǎng)的精度是軌道平面直線度測量的先決條件,應(yīng)采用分段測量和即測即用的模式。而全站儀的整平精度及其觀測精度則直接影響測點(diǎn)的點(diǎn)位中誤差。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(shè)(2019年3期)2019-10-10 01:40:18
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(zhì)(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08
