基于改進(jìn)人工蜂群算法的主動(dòng)懸架LQR控制器設(shè)計(jì)
2021-06-16 02:14:20王雅璇羅建南羅小桃楊曉青喻凡
噪聲與振動(dòng)控制 2021年3期
關(guān)鍵詞:優(yōu)化
王雅璇,羅建南,羅小桃,楊曉青,喻凡
(1.上海交通大學(xué) 機(jī)械系統(tǒng)與振動(dòng)國家重點(diǎn)實(shí)驗(yàn)室,上海 200240;2.上海大學(xué) 機(jī)電工程與自動(dòng)化學(xué)院,上海 200444;3.上海宇航系統(tǒng)工程研究所,上海 201109)
懸架作為車輛行駛性能中重要的相關(guān)系統(tǒng),其性能好壞對車輛的行駛平順性和乘坐舒適性有著重要影響[1]。目前對于懸架系統(tǒng)的研究主要集中在主動(dòng)懸架控制策略的設(shè)計(jì)上,歷年來國內(nèi)外學(xué)者在此領(lǐng)域做了很多研究,眾多控制方法和策略也都逐漸應(yīng)用到主動(dòng)懸架的控制上。其中,最優(yōu)控制中的線性二次型調(diào)節(jié)器(Linear quadratic regulator,LQR)控制算法相對成熟,其理論基礎(chǔ)也比較完善,因此得到廣泛應(yīng)用。但該控制策略的控制效果主要取決于其性能指標(biāo)權(quán)重系數(shù)的分配,早期研究人員主要通過試錯(cuò)法依靠經(jīng)驗(yàn)對權(quán)重系數(shù)進(jìn)行調(diào)試。隨著智能算法的發(fā)展,許多學(xué)者開始將智能算法應(yīng)用于主動(dòng)懸架控制策略的設(shè)計(jì)中,He等[2]引入遺傳算法對車輛組合系統(tǒng)中LQR控制器和Kalman濾波器進(jìn)行改進(jìn),使車輛組合系統(tǒng)的整體性能得到提升;孔英秀等[3]結(jié)合粒子群優(yōu)化和差分進(jìn)化算法的優(yōu)勢,對具有雙線性矩陣不等式約束的主動(dòng)懸架H∞控制器優(yōu)化參數(shù),使懸架系統(tǒng)在考慮輸入時(shí)滯時(shí)仍能保持自身性能;馮金芝等[4]提出分層控制策略,將遺傳算法應(yīng)用到模糊PID上層控制器上,實(shí)現(xiàn)了控制器的參數(shù)自適應(yīng);殷智宏等[5]利用免疫算法對主動(dòng)懸架的模糊控制器進(jìn)行二次尋優(yōu),并與傳統(tǒng)模糊控制器進(jìn)行控制效果對比,結(jié)果表明所設(shè)計(jì)的控制器使懸架性能得到有效提升。
人工蜂群(Artificial bee colony,ABC)算法是一種基于種群的元啟發(fā)式智能算法,通過模擬蜂群采蜜行為在種群中搜索最優(yōu)解[6]。因其控制參數(shù)少、魯棒性較強(qiáng)且易于實(shí)現(xiàn)而受到廣泛應(yīng)用。為克服人工蜂群算法具有的收斂速度慢和趨于局部最優(yōu)的缺點(diǎn),Cui等[7]通過在跟隨蜂選擇蜜源時(shí)引入基于蜜源自適應(yīng)排序的選擇策略,有效改善了算法的收斂速度;文獻(xiàn)[8]采用基于對立學(xué)習(xí)的混沌系統(tǒng)對種群進(jìn)行初始化,并提出一種新的概率選擇策略對ABC算法進(jìn)行改進(jìn),通過改進(jìn)ABC算法在K均值聚類算法上應(yīng)用的測試結(jié)果,驗(yàn)證了改進(jìn)算法的有效性。
本文提出一種基于改進(jìn)人工蜂群算法的LQR控制策略。通過對標(biāo)準(zhǔn)人工蜂群算法的搜索策略和選擇策略進(jìn)行改進(jìn),利用改進(jìn)算法較強(qiáng)的全局搜索和局部搜索能力對LQR控制器的權(quán)重系數(shù)進(jìn)行優(yōu)化設(shè)計(jì),建立主動(dòng)懸架1/4車輛模型進(jìn)行控制仿真以驗(yàn)證所設(shè)計(jì)控制策略的正確性和有效性。
1 車輛控制系統(tǒng)模型的建立
1.1 主動(dòng)懸架1/4車輛模型的建立
基于圖1所示的2自由度主動(dòng)懸架的1/4車輛模型,根據(jù)牛頓運(yùn)動(dòng)定律,可建立車輛系統(tǒng)的運(yùn)動(dòng)方程,即:

圖1 主動(dòng)懸架的1/4車輛模型

式中:mb為1/4車輛簧載質(zhì)量,單位為kg;mw為1/4車輛非簧載質(zhì)量,單位為kg;Ks為懸架彈簧剛度,單位為N/m;Kt為輪胎剛度,單位為N/m;zb為車身垂向位移,單位為m;zw為車輪垂向位移,單位為m;zg為路面垂向位移,單位為m;Fu為主動(dòng)懸架作動(dòng)器控制力,單位為N。
采用濾波積分白噪聲模擬路面輸入,即:

式中:zg為二維隨機(jī)路面垂向位移,單位為m;f0為下截止頻率,單位為Hz;G0為路面不平度系數(shù),單位為m3/cycle;u為恒定的車輛前行速度,單位為m/s;w為數(shù)學(xué)期望為零的高斯白噪聲。
1.2 控制系統(tǒng)的建立
系統(tǒng)的狀態(tài)方程:


車輛懸架系統(tǒng)的主要性能評價(jià)指標(biāo):體現(xiàn)車輛的乘坐舒適性的車身垂向振動(dòng)加速度(BA),衡量輪胎附著能力的輪胎動(dòng)載荷(DTD),描述相對于平衡位置的懸架位移變化程度的懸架動(dòng)行程(SWS)。因此系統(tǒng)輸出變量可取。
系統(tǒng)輸出方程:

其中,輸出矩陣C和前饋矩陣D為

2 控制器設(shè)計(jì)與優(yōu)化
基于所建立的主動(dòng)懸架1/4車輛模型,為了確保主動(dòng)懸架作動(dòng)器的最優(yōu)控制力,針對主動(dòng)懸架系統(tǒng)進(jìn)行了LQR控制器設(shè)計(jì),并通過改進(jìn)人工蜂群算法對LQR控制器性能指標(biāo)的權(quán)重系數(shù)進(jìn)行參數(shù)優(yōu)化,以確保控制器效果最優(yōu)。基于改進(jìn)人工蜂群優(yōu)化算法的LQR控制原理如圖2所示。

圖2 基于改進(jìn)人工蜂群算法的LQR控制框圖
2.1 主動(dòng)懸架LQR控制器設(shè)計(jì)
車輛懸架系統(tǒng)線性二次型最優(yōu)控制器(LQR)的性能評價(jià)指標(biāo)函數(shù)J可定義為懸架系統(tǒng)的3個(gè)性能評價(jià)指標(biāo)的權(quán)重平方和的積分:

式中:q1、q2和q3分別為車身垂向振動(dòng)加速度(BA)、輪胎動(dòng)載荷(DTD)和懸架動(dòng)行程(SWS)的權(quán)重系數(shù),實(shí)際代表懸架系統(tǒng)3種互相沖突的性能的相對要求。
根據(jù)最優(yōu)控制理論,將式(5)整理為標(biāo)準(zhǔn)二次型的形式:

其中:

當(dāng)車輛參數(shù)和性能指標(biāo)的權(quán)重系數(shù)都確定后,最優(yōu)控制反饋增益矩陣可由黎卡提(Riccati)方程求得,其形式如下:

則最優(yōu)控制反饋增益矩陣K為

主動(dòng)懸架作動(dòng)器的最優(yōu)控制力即為

2.2 人工蜂群算法優(yōu)化
2.2.1 人工蜂群算法
標(biāo)準(zhǔn)人工蜂群算法主要分為3個(gè)階段:引領(lǐng)蜂(Employed Bee)階段、跟隨蜂階段(Onlooker Bee)和偵察蜂(Scout Bee)階段[9]。引領(lǐng)蜂和跟隨蜂各占蜂群數(shù)量的一半,引領(lǐng)蜂通過反饋當(dāng)前蜜源的質(zhì)量信息來招募跟隨蜂對蜜源附近進(jìn)行搜索,偵察蜂則負(fù)責(zé)在蜂巢附近隨機(jī)搜索新的蜜源。
ABC算法在求解優(yōu)化問題時(shí),蜜源i(i=1,2,…,NP)被抽象為解空間中的潛在解,蜜源位置可表示為Xi=[Xi1Xi2…XiD],其中NP為蜜源數(shù)量,D為解空間的維數(shù)。蜜源按照式(10)進(jìn)行隨機(jī)初始化:

式中:fiti是第i個(gè)蜜源的適應(yīng)度值;fi為優(yōu)化問題的目標(biāo)函數(shù)值。每個(gè)蜜源對應(yīng)一只引領(lǐng)蜂,引領(lǐng)蜂根據(jù)式(12)在該蜜源附近進(jìn)行隨機(jī)搜索以保持種群多樣性:


在跟隨蜂階段,每只跟隨蜂按照式(14)定義的蜜源選擇概率來選擇蜜源,并按照式(12)對所選擇蜜源附近進(jìn)行搜索,即:
適應(yīng)度值越大的蜜源的招募的跟隨蜂越多,因此圍繞相對優(yōu)解的局部搜索越多。跟隨蜂搜索產(chǎn)生的可能解和原本蜜源之間也通過式(13)的貪婪選擇策略進(jìn)行優(yōu)選。當(dāng)針對該蜜源的搜索次數(shù)達(dá)到搜索次數(shù)極限(limit)后,則從潛在解集合中刪除該非優(yōu)解,偵察蜂按照式(10)進(jìn)行隨機(jī)搜索重新產(chǎn)生新蜜源。
2.2.2 搜索策略優(yōu)化
標(biāo)準(zhǔn)ABC算法中,引領(lǐng)蜂和跟隨蜂都利用式(12)的搜索策略對蜜源附近進(jìn)行隨機(jī)搜索,該搜索策略保證了ABC算法良好的全局探索性,但局部搜索能力不強(qiáng)[10]。本文采用區(qū)分引領(lǐng)蜂和跟隨蜂的搜索策略的方法,在保持引領(lǐng)蜂良好搜索能力的同時(shí),增強(qiáng)跟隨蜂的局部搜索能力。因此為跟隨蜂引入以下3種搜索策略:

式中:,r,r1,r2均為[0,1]上的均勻隨機(jī)數(shù);分別為種群中最優(yōu)解和隨機(jī)選擇的解的第j維,且同一搜索策略中,所有索引都互不相等。
公式(15)是基于PSO算法啟發(fā)的搜索策略[11],第一部分的“慣性”部分保證了算法在搜索前期不會在非優(yōu)解附近進(jìn)行過多搜索;式(16)和式(17)是基于差分算法的DE/best/1和DE/best/2形式啟發(fā)的搜索策略,當(dāng)前最優(yōu)解信息的引入可以增強(qiáng)種群間的信息交互[12]。跟隨蜂在局部搜索的過程中同時(shí)對3個(gè)方向進(jìn)行搜索可大幅提升ABC算法的收斂速度,也能有效避免算法陷入局部最優(yōu)。
2.2.3 選擇策略調(diào)整
在標(biāo)準(zhǔn)ABC算法中,跟隨蜂在選擇蜜源時(shí)采用式(14)的輪盤賭選擇策略。在算法搜索過程,當(dāng)蜜源之間的適應(yīng)度值差別較大時(shí),即迭代過程中產(chǎn)生部分“超常個(gè)體”時(shí),這些個(gè)體的較強(qiáng)競爭力就會導(dǎo)致較大的選擇壓力(selection pressure),從而使種群多樣性難以維護(hù),算法容易出現(xiàn)過早收斂和提前停滯現(xiàn)象。
為了降低選擇壓力對算法的影響,保持ABC算法中的種群多樣性,本文采用式(18)計(jì)算選擇概率,即:

式中:max(fiti)是蜜源適應(yīng)度最大值。
2.3 基于改進(jìn)人工蜂群算法的LQR控制器權(quán)重系數(shù)優(yōu)化模型
2.3.1 優(yōu)化變量
主動(dòng)懸架LQR控制器的設(shè)計(jì)中,其性能指標(biāo)權(quán)重系數(shù)的選取反映了設(shè)計(jì)者對懸架不同性能的重視程度,權(quán)重系數(shù)的大小將直接影響LQR控制器設(shè)計(jì)的好壞。因此針對主動(dòng)懸架LQR控制器的各性能指標(biāo)的權(quán)重系數(shù)進(jìn)行優(yōu)化,即車身垂向振動(dòng)加速度的權(quán)重系數(shù)q1、輪胎動(dòng)載荷的權(quán)重系數(shù)q2和懸架動(dòng)行程的權(quán)重系數(shù)q3。
由于3個(gè)權(quán)重系數(shù)實(shí)際代表的是懸架的3種不同性能的相對值,為方便起見,本文取車身垂向振動(dòng)加速度的權(quán)重系數(shù)q1=1。因此,優(yōu)化模型的設(shè)計(jì)變量即:

2.3.2 目標(biāo)函數(shù)
目標(biāo)函數(shù)需要以所關(guān)注的系統(tǒng)性能指標(biāo)為基礎(chǔ),考慮到懸架各性能指標(biāo)在單位和數(shù)值量級上的差異,在目標(biāo)函數(shù)中對各性能指標(biāo)進(jìn)行去量綱處理。以相同車輛模型參數(shù)的被動(dòng)懸架的各性能指標(biāo)為基準(zhǔn),主動(dòng)懸架性能指標(biāo)與被動(dòng)懸架性能指標(biāo)的比值作為優(yōu)化模型的目標(biāo)函數(shù),即:

式中:RMS為性能指標(biāo)的均方根值;Z為權(quán)值系數(shù)矩陣;()p、(zw-zg)p和(zb-zw)p分別為被動(dòng)懸架的相應(yīng)性能指標(biāo)。
2.3.3 基于改進(jìn)人工蜂群算法的權(quán)重系數(shù)優(yōu)化
本文提出的基于改進(jìn)人工蜂群算法的LQR控制器權(quán)重系數(shù)優(yōu)化流程如圖3所示。其具體實(shí)現(xiàn)步驟如下:
(1)設(shè)置算法控制參數(shù)
算法控制參數(shù)主要包括種群規(guī)模NP、最大搜索次數(shù)limit、終止迭代次數(shù)max Cycle。本文中將種群規(guī)模設(shè)置為100,終止迭代次數(shù)設(shè)置為500,最大搜索次數(shù)通常按照式(20)計(jì)算,即設(shè)置為200次。

式中:D為解空間的維數(shù)。
(2)確定適應(yīng)度函數(shù)
在優(yōu)化過程中,蜜源質(zhì)量的優(yōu)劣通過適應(yīng)度函數(shù)值來評估。由于LQR控制器權(quán)重系數(shù)優(yōu)化的目標(biāo)函數(shù)值為非負(fù)值,因此適應(yīng)度函數(shù)可構(gòu)造為:

式中:fit為蜜源的適應(yīng)度值;f為蜜源的目標(biāo)函數(shù)值。
對于每一組權(quán)重系數(shù)矩陣,由式(19)計(jì)算得到目標(biāo)函數(shù)值f后,再根據(jù)式(21)計(jì)算其適應(yīng)度函數(shù)值。
(3)引領(lǐng)蜂搜索階段
在引領(lǐng)蜂階段,引領(lǐng)蜂通過在當(dāng)前蜜源附近按照式(12)的搜索策略對該蜜源進(jìn)行隨機(jī)搜索優(yōu)化,按照式(13)的貪婪選擇策略決定是否對當(dāng)前蜜源進(jìn)行更新。
(4)跟隨蜂搜索階段
在跟隨蜂搜索階段,跟隨蜂根據(jù)式(18)的選擇策略選擇蜜源,并根據(jù)式(15)、式(16)和式(17)所提出的不同搜索策略同時(shí)對所選擇蜜源附近的3個(gè)方向進(jìn)行局部搜索,并根據(jù)貪婪選擇策略決定是否對當(dāng)前蜜源進(jìn)行更新。

圖3 LQR控制器權(quán)重系數(shù)優(yōu)化流程圖
(5)偵察蜂搜索階段
偵察蜂階段只進(jìn)行更新操作,當(dāng)存在搜索次數(shù)超出limit的蜜源時(shí),偵察蜂則進(jìn)行隨機(jī)搜索生成新的蜜源來替換該蜜源。
(6)判斷終止條件
判斷算法迭代次數(shù)是否超出max Cycle,若滿足條件則結(jié)束計(jì)算;若不滿足,則繼續(xù)步驟(3)、步驟(4)、步驟(5),直到滿足終止條件,輸出最優(yōu)權(quán)重系數(shù)矩陣。
3 仿真分析
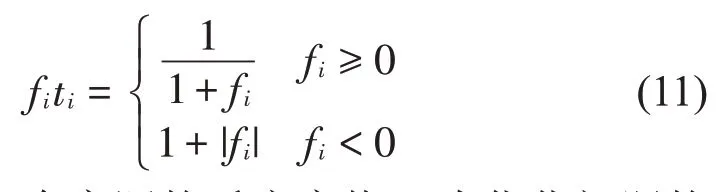
在取車身垂向振動(dòng)加速度的權(quán)重系數(shù)q1=1的基礎(chǔ)上,優(yōu)化變量q2、q3的取值可為任意非負(fù)值,本文中將優(yōu)化變量的取值范圍分別設(shè)置為:q2∈[10-3106],q3∈[10-3106],通過改進(jìn)人工蜂群算法優(yōu)化后,最終得到的權(quán)重系數(shù)分別為q1=1,q2=27 867.4,q3=5 934.64。根據(jù)表1所示的控制仿真過程中的車輛模型參數(shù),可在MATLAB/Simulink環(huán)境中搭建主動(dòng)懸架的1/4車輛模型進(jìn)行仿真,相應(yīng)的懸架性能指標(biāo)的仿真曲線圖如圖4至圖5所示,仿真結(jié)果如表2所示。
圖4 傳統(tǒng)LQR控制

圖5 基于改進(jìn)人工蜂群算法的LQR控制

表1 仿真主要參數(shù)

表2 不同控制仿真結(jié)果
通過相同路面激勵(lì)下傳統(tǒng)LQR控制器和基于改進(jìn)ABC算法優(yōu)化的LQR控制器的仿真結(jié)果對比可知,以被動(dòng)懸架性能指標(biāo)作為參考,傳統(tǒng)LQR控制器使主動(dòng)懸架的3個(gè)性能指標(biāo)分別優(yōu)化了3.76%、11.05%和18.16%,基于改進(jìn)ABC算法優(yōu)化的LQR控制器使主動(dòng)懸架的3個(gè)性能指標(biāo)分別優(yōu)化了25.34%、9.53%和33.04%。
兩種主動(dòng)懸架都使懸架性能得到優(yōu)化,但從車身加速度和輪胎動(dòng)載荷的對比可知,依據(jù)經(jīng)驗(yàn)的傳統(tǒng)LQR控制方法雖然使輪胎動(dòng)載荷優(yōu)化得更多,但對于標(biāo)志車輛平順性好壞的車身加速度優(yōu)化效果并不明顯,未能兼顧懸架綜合性能的優(yōu)化;基于改進(jìn)人工蜂群算法優(yōu)化的LQR控制器則使兩者均得到較好的優(yōu)化,在懸架工作空間得到較充分利用的基礎(chǔ)上,同時(shí)改善了車輛平順性和操縱穩(wěn)定性,使懸架的總體性能得到顯著提升。
4 結(jié)語
針對傳統(tǒng)LQR控制方法中權(quán)重系數(shù)選擇方法的不足,本文提出一種基于改進(jìn)人工蜂群算法的主動(dòng)懸架LQR控制策略。通過區(qū)分人工蜂群算法中引領(lǐng)蜂和跟隨蜂的功能,在跟隨蜂階段引入3個(gè)新的解搜索公式,并對選擇策略進(jìn)行調(diào)整,以更好地平衡算法的全局搜索和局部搜索能力。基于所提改進(jìn)算法對LQR控制器中性能指標(biāo)的權(quán)重系數(shù)進(jìn)行優(yōu)化,并建立主動(dòng)懸架的1/4車輛仿真模型,驗(yàn)證所設(shè)計(jì)控制器的正確性和有效性。仿真結(jié)果表明,本文設(shè)計(jì)的基于改進(jìn)人工蜂群算法的主動(dòng)懸架LQR控制器能有效改善車輛行駛平順性和操縱穩(wěn)定性,使懸架綜合性能得到有效提升。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
