一種位姿解耦的主操作手結構設計與優化方法
2021-06-15 01:07:46王得晨杜付鑫屈梁成類延強王繼來李取浩
哈爾濱工業大學學報 2021年7期
關鍵詞:手術
王得晨,杜付鑫,3,屈梁成,類延強,王繼來,李取浩
(1.山東大學 機械工程學院,濟南 250061;2.高效潔凈機械制造教育部重點實驗室(山東大學) 濟南 250061;3.山東大學 控制科學與工程學院,濟南 250061;4.智能無人系統教育部工程研究中心(山東大學)濟南 250061)
隨著機器人技術與微創手術的愈發成熟,代表著微創手術頂尖技術的微創手術機器人應運而生[1]。主從式微創手術機器人的出現提高了微創手術的精度與可靠性,醫生通過主操作手對手術器械進行遙操作,數字化的機械手代替人手完成手術,可減小手部顫動帶來的影響,從而使手術動作更加靈活、準確。近年來,隨著對連續體機械臂[2-3]和力反饋技術[4]的深入研究,進一步擴大了微創手術機器人的應用場景,同時也對主操作手性能提出了更高的要求。主操作手在保證具有足夠工作空間的基礎上,應具備良好的運動性能,以確保主從控制和力反饋的準確性,從而進一步提高手術的成功率以及降低醫生在進行手術操作時的疲勞感[5]。
主操作手可分為串聯型和并聯型兩個類別,分別以Touch系列[6-7]和Sigma[8]系列為代表,但這兩種通用型主操作手價格十分昂貴,且對微創手術并不具針對性,所以在國內外多個團隊的手術機器人系統中,大多使用專門設計的主操作手。串聯型主操作手結構簡單,且具備較大工作空間和良好的運動性能,目前在醫療領域多采用串聯型結構。da Vinci Surgical System[9-10]中所設計的主操作手,具備較大工作空間,能夠提供六維力反饋,但其操作端整體機構過于龐大,且位姿具有耦合關系;英國帝國理工學院Wisanuvej等[11]和韓國科學技術院Lee等[12]設計的主操作手為主從間各關節一一映射的近似同構關系,這種主從同構設計可以提高醫生操作時的直觀性和透明性,但同時也存在應用領域較為狹窄和位姿耦合的問題;哈爾濱工業大學王濤等[13-14]基于串聯結構設計了一種7自由度主操作手,具備較大工作空間和主動重力補償能力,Liang等[15]基于平行四邊形機構和位置補償機構,設計了一種位姿完全解耦的9關節主操作手,具備六維力反饋功能和良好的運動性能,但其在位置補償機構中新加入了一個電機用于實現位姿解耦,略微增加了控制系統的復雜性;天津大學王樹新等[16-17]在其“妙手”微創手術機器人系統中設計了一種繩驅動6自由度主操作手,具有體積小、重量輕以及工作空間內無奇異點等特點;天津工業大學桑宏強等[18]設計了一種具備位置高精度的串聯型主操作手,但未在位姿耦合方面進行研究。
目前,國內外在主操作手方面的研究大多未考慮位姿耦合的問題,而現有的少數解耦策略會增加控制系統的復雜性。因此設計一種基于機械結構的位姿解耦主操作手,對提高醫生在進行操作時的直觀性和穩定性有重要意義。為此,設計了一種多節串聯型主操作手,該主操作手在保留經典串聯結構優點的基礎上,只通過機械結構實現了位姿進一步解耦,并未增加控制難度;分析了主操作手的正、逆運動學,從運動學和幾何角度驗證了位姿解耦策略的正確性;求解了主操作手的雅可比矩陣,分析了基于雅可比矩陣的多種運動性能評價指標,并定義了一種綜合運動性能評價指標,采用遺傳算法對該指標進行了優化分析,以確保主操作手在位姿解耦的基礎上,仍具備良好且平穩的運動性能。
1 主操作手結構設計
為滿足對手術器械末端點在空間中任意位置和姿態的控制,所設計的主操作手共有8個關節,6個自由度,采用串聯型結構,整體可細分為3部分:1)位置調整機構,包括3個自由度,由4個旋轉關節組成,用于控制手術器械末端點在空間中的位置;2)姿態調整機構,包括3個自由度,由3個旋轉關節組成,用于控制手術器械末端點在空間中的姿態;3)夾持機構由1個開合關節構成,用于控制手術器械的開合運動,整體機構如圖1所示。

圖1 主手整體結構
位置調整機構由3個主動關節J1、J2、J3和1個被動關節J4組成。主動關節為裝配有Maxon直流伺服電機和編碼器的獨立關節。編碼器用于檢測關節轉動角度,并結合正運動學,實現主從控制;電機則通過輸出力矩,實現重力平衡和力反饋。力反饋傳動機構如圖1紅色虛線框內所示,主動關節所配備的直流伺服電機通過固定于電機軸上的卷筒和鋼絲繩與傳動盤構成繩傳動減速機構,以此達到增加輸出轉矩,實現力反饋功能的目的。
為了提高繩傳動的傳動能力,采用有螺旋導槽的多圈單層纏繞方式,如圖2(a)所示。這種卷繞方式通過增加纏繞圈數不僅提高了傳動扭矩,而且可以降低傳動誤差[19],同時因為導槽的存在,可避免鋼絲相互摩擦,增加了鋼絲與卷筒的接觸面積,降低了相應的接觸應力,使鋼絲具有較長使用壽命[20]。鋼絲繩的預緊力對繩傳動的傳動精度有較大影響,設計如圖2(b)所示預緊裝置,可方便快速地對鋼絲繩預緊力進行調節。

(a)鋼絲多圈單層纏繞 (b)鋼絲預緊裝置
在圖3所示結構中,坐標系表示主操作手末端點的姿態。當姿態調整機構各關節角度保持不變,主操作手進行位置調整時,坐標系發生了轉動,說明其姿態與位置具有耦合關系。這就意味著當醫生對主操作手在空間中的不同位置,進行相同姿態的操作時,例如使末端姿態保持水平,關節之間具有不同的角度關系φ1、φ2,導致操作不具備一致性,影響了醫生操作的舒適感。設計被動關節的目的在于解除姿態與位置的耦合關系。

圖3 位姿耦合關系
通過引入雙平行四邊形機構在位置調整機構與姿態調整機構中間添加了一個被動關節J4,如圖4所示,該關節無獨立電機、編碼器配置,不具備主動運動能力。J4隨著J2、J3的轉動而轉動,抵消了這兩個關節轉動對末端姿態的影響,具體在下文正運動學部分進行說明。通過該被動關節可使姿態調整機構的初始位置始終保持水平,提高了操作的一致性和直覺感。引入的平行四桿機構也在一定程度提高了主操作手的剛度,而且該設計也有助于簡化主操作手的運動學建模的計算量。
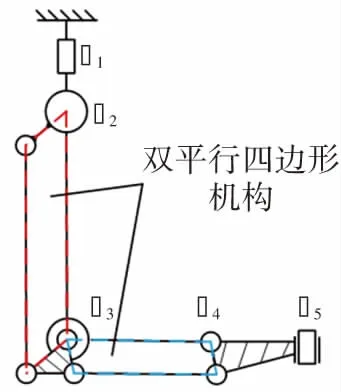
圖4 雙平行四邊形機構
姿態調整機構采用了經典的機器人“球腕”機構,即關節J5、J6和J7這3個軸的軸線相交于一點P,如圖1藍色虛線框內所示。這種設計可使主操作手末端點的位置不受這3個關節轉動的影響,同時有助于逆運動學的求解,具體在本文運動學部分對此進行說明。姿態調整機構中的3個關節同樣各自配備獨立的Maxon直流伺服電機與編碼器,用于實現重力平衡、力反饋與主手位姿求解。夾持機構主要用于控制從操作手末端手術器械的夾持、剪切等操作,以及反饋器械與組織之間的接觸力,主體結構由開合關節、手柄、電機和繩傳動減速機構構成。
2 主操作手運動學分析
在微創手術機器人系統中,為實現醫生通過主操作手控制從端手術器械運動,需要主操作手末端坐標與從操作手末端坐標之間建立一定映射關系。因此,需要通過主手各關節角度解算主操作手的正向運動學,來獲取主操作手末端的位置與姿態信息。同時,主操作手也應具備根據從操作手的位姿主動調節自身位姿的能力,因此也需解算主手逆向運動學。
2.1 正運動學分析
主操作手正運動學是在各連桿幾何特征已知的前提下,通過測量各個關節轉角,來求解主操作手末端的位姿。主操作手的各關節角度由編碼器測得,采用改進后的D-H(Denavit-Hartenberg)參數法進行分析,主操作手運動學模型的建立如圖5所示,D-H參數如表1所示。由于夾持機構中的關節J8與主操作手運動無關,故在運動學分析中將其忽略。

圖5 主操作手運動學模型

表1 主操作手D-H參數表
將D-H參數表中相應數據代入式(1),得到各個關節的旋轉變換矩陣:
(1)
再將各關節的旋轉變換矩陣進行矩陣連乘,即可得到主操作手位姿矩陣:
(2)
(3)
分析式(3)中各元素可知,主操作手末端點位置在“球腕”機構的作用下,位置向量P只受前3個關節角度影響。姿態矩陣R只包含θ1、θ5、θ6和θ7這4個角度信息,說明其姿態變換只與這4個角度有關。相比于其他串聯型主操作手位姿分離設計[21-22],(末端姿態至少與6個關節角度相關,處于完全耦合狀態),解除了姿態與位置中兩個關節的耦合關系。這得益于引入的平行四桿機構所產生的被動關節J4。當醫生對主1手進行操作,關節J2與J3發生角度變化時,J4會產生相應的負角度變化,原理如圖6所示。

(a)J4逆時針旋轉 (b)J4順時針旋轉
根據D-H參數法定義,圖6中各關節逆時針旋轉時,對應的關節角θ為正,順時針時為負,且由表1可知,在工作空間內θ2始終為負,θ3始終為正。θ4與θ2和θ3的線性關系,可分為正負兩種情況,由幾何關系不難得出兩種情況的角度關系分別為|θ4|+|θ3|=|θ2|和|θ4|+|θ2|=|θ3|。按照規定分別代入θ2、θ3和θ4的符號后可求得θ4+θ3=-θ2和-θ4-θ2=θ3,即
θ4=-θ2-θ3
(4)
這種負角度變化可以抵消J2和J3角度變化對姿態部分帶來的影響,以此實現位姿進一步解耦。同時通過與文獻[21-22]對比分析可知,該結構可以降低主操作手正逆運動學的求解難度。
2.2 逆運動學分析
為實現力反饋功能,在主手的各個關節均裝一個有直流伺服電機,使主手在實現力反饋功能的基礎上,同時具備了主動運動的能力。逆運動學是根據主手末端點在操作空間下的位姿,求解出各個關節對應的角度。利用電機驅動和逆運動學,能夠實現主操作手根據從操作手位姿進行主動調節的功能。

(5)
根據式(5)第二項,利用三角代換可得:
θ1=arctan(py/px),θ1∈[-80°,80°]
(6)
將式(5)兩端平方后,相加消元后可求得:

(7)
同理可得:

(8)
由上文角度關系可知:
θ4=-θ2-θ3
(9)
(10)
θ5∈[-90°,90°]
(11)
(12)
由上述分析可知,對主操作手逆運動學的求解,只需要進行兩次逆變換即可解算出θ1~θ7的角度公式,說明位姿解耦設計有效降低了逆運動學的求解難度。主操作手逆運動學為主從間位置控制、術前位置規劃打下基礎。
3 運動性能分析與尺寸優化
為保證主操作手在工作空間內有良好的運動性能,基于條件數等性能指標對主操作手的靈巧度進行分析,并通過遺傳算法完成對桿件尺寸的非線性尋優。
3.1 工作空間
主操作手工作空間是衡量主操作手性能的一項重要指標,為保證醫生在主從操作中順利執行手術意圖,主操作手工作空間必須大于手術要求的工作區域。主操作手的工作空間大小與主操作手各桿件尺寸成正比例相關,腹腔鏡手術工作空間需求為一個半徑r=80 mm,高度h=180 mm的圓柱體,限制主操作手桿件尺寸最小值分別為a2min=200 mm,a3min=150 mm,a4min=90 mm。主操作手最小工作空間如圖7所示,代表手術區域的圓柱體完全位于工作空間內部,滿足手術需求。

圖7 主手最小運動空間與手術區域
3.2 基于雅可比矩陣的性能評價指標
雅可比矩陣表示了主操作手操作空間速度和關節空間速度之間的映射關系,雅可比矩陣中的每一行對應操作空間中的一個自由度,每一列對應主操作手的一個主動關節。基于雅可比矩陣的運動性能分析對主操作手的尺寸結構優化有重要意義,其表達式為
(13)

根據雅可比矩陣定義,求得線速度雅可比矩陣Jv(θ)和角速度雅可比矩陣Jω(θ),其具體表達式為:
(14)
(15)
Jω(θ)=
(16)
條件數是評價主操作手運動性能的一個重要指標,基于雅可比矩陣的條件數有多種表達方式,當采用譜范數時,定義如式(17)所示
κ=σmax/σmin
(17)

此外,條件數還有一些其他含義:1)條件數同時是主手關節空間到操作空間的誤差放大系數,可以反映出主操作手的運動精度;2)從控制角度來看,κ-1越小,機器人速度方程的病態程度就越大失控[23],不利于主從控制。綜上所述,主操作手逆運動學的求解精度越差,會導致機器人條件數κ-1越接近于1,主操作手的運動性能和精度都越好。
但條件數是一種局部評價指標,只能反映主操作手末端在空間中某點的性能。為描述主操作手工作空間內整體的操作性能,Gosselin等[24〗提出一種整體均值條件數指標,即全域性能指標來表示整體運動性能,表達式為
(18)
式中:κ為條件數,ω為主手工作空間。全域性能指標的取值范圍為(0,1],其數值越接近于1表示主操作手工作空間內的平均運動性能越好。但全域性能指標同樣有其局限性,全域性能指標僅能代表整個工作空間的運動性能,不能反映靈巧度的波動狀況。因此可能會出現主操作手工作空間中靈巧度高的區域與靈巧度低的區域存在較大差距的情況,為解決這一問題,引入全域性能波動指標,定義為
(19)
基于方差分析法的全域性能波動指標反映了主操作手在工作空間內條件數的波動情況。主操作手的最高靈巧度區域通常位于工作空間的中心位置,并且距離工作空間中心位置越遠,靈巧度越低。因此σ越大,工作空間中心的靈巧度和邊緣的靈巧度之間的差距就越大;σ越小,中心與邊緣之間的靈巧度差距就越小,運動性能越穩定。
綜上所述,為保證主操作手在工作空間內既具備良好的整體靈巧度,又能夠在運動中保持良好的穩定性,應使全域性能指標在其定義域內盡可能大,而全域性能波動指標則越小越好。據此定義主操作手綜合性能指標:
f=η-σ
(20)
顯然f取值越大,主操作手的綜合運動性能越好。
但是,通過對主操作手單獨桿件長度的分析可知,桿件長度的變化會引起全域性能指標和全域性能波動以相同趨勢變大或變小,造成相反影響。例如當a2長度增加時,主操作手全域性能指標增大,具有更好的靈活性;但同時全域性能波動指標也增大,波動程度增加。而且在桿件的不同尺寸區間,這兩種指標對桿件長度變化的敏感程度也不相同,是一種非線性變化。因此,需采用遺傳算法對主操作手桿件尺寸進行優化。
3.3 基于遺傳算法的主操作手尺寸優化
遺傳算法結合了遺傳學原理和自然選擇機理,通過模擬自然法則達到搜索最優解的目的,非常適用于解決非線性優化問題。基于遺傳算法對主操作手綜合性能指標進行全局尋優,如圖8所示,求出主操作手運動性能最優的桿件尺寸組合。

圖8 主操作手遺傳算法流程
遺傳算法優化三要素分別為:
1)設計變量。主操作手桿件尺寸a2、a3、a4。
2)目標函數。f=η-σ→MAX。
3) 約束條件。200≤a2≤ 300, 150≤a3≤200, 90≤a4≤110。
設置初始種群數量為200個,遺傳迭代120次,結果如圖9所示,種群在80代左右趨于穩定。
根據遺傳算法可得最優解為:fmax=0.382 3,此時各桿件尺寸為a2=266.08 mm,a3=151.69 mm,a4=92.02 mm。

(a)全域性能指標迭代結果

(b)全域性能波動指標迭代結果

(c)綜合性能指標迭代結果
3.4 優化前后靈巧度分析
為說明主操作手不同區域的運動性能,基于蒙特卡洛法分析各區域靈巧度,其條件數分布狀況如圖10所示,紅色表示運動性能較差,條件數κ<0.3;藍色表示運動性能中等,0.2≤κ<0.5;綠色表示運動性能良好,κ≥0.5。
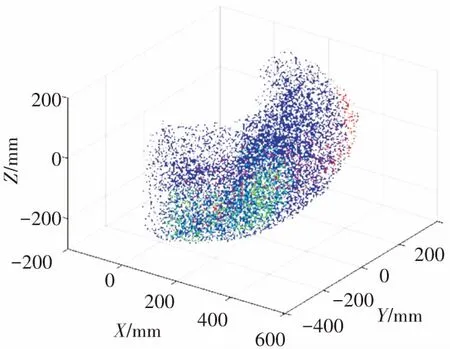
圖10 操作手靈巧度
優化前主操作手設計尺寸取約束條件中值,即a2=250 mm,a3=175 mm,a4=100 mm。此時的綜合性能指標為fb=0.331 5。為直觀表達,其靈巧度分析結果如圖11所示,其中圖11(a)(b)為其靈巧度投影在X-Y和X-Z平面的等高線圖;圖11(c)為運動性能良好區域的輪廓和體積。
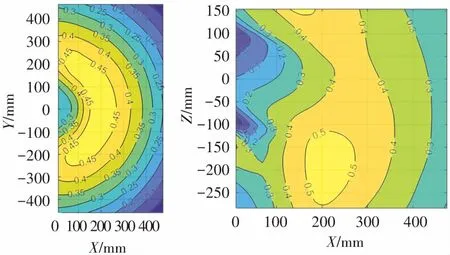
(a)靈巧度在X-Y方向的投影 (b)靈巧度在X-Z方向的投影

(c)運動性能良好區域輪廓和體積
優化后主操作手尺寸為a2=266.083 3 mm,a3=151.69 mm,a4=92.02 mm,對應綜合性能指標為fmax=0.382 3。其靈巧度如圖12所示,圖12(a)(b)中虛線表示主操作手規定手術工作區域。
通過優化前fb=0.331 5和優化后fmax=0.382 3對比可知,主操作手的綜合性能指標提高了15.32%,靈巧度整體有明顯改善,其峰值區域能夠達到κ=0.6。尤其是運動性能良好區域,即κ≥0.5區域,體積顯著增加,達到2.306 1×107mm3,較優化前體積7.680 1×106mm3相比,增加了約2倍。該區域可基本覆蓋規定手術工作區域,使手術操作始終位于高靈巧度空間。

(a)靈巧度在X-Y方向的投影 (b)靈巧度在X-Z方向的投影

(c)運動性能良好區域輪廓和體積
4 結 論
1)提出了一種具備新型位姿解耦設計的8關節串聯型主操作手,完成了該主操作手的機械結構設計。通過引入平行四邊形機構產生的被動關節J4,以相反運動趨勢補償了J2和J3對末端姿態的影響,進一步解除了位姿的耦合關系;該主操作手同時具備力反饋功能,各個關節均配有一個直流伺服電機,采用繩傳動方式進行減速增矩,為減小繩傳動的傳動誤差,設計了一種預緊力快速調節機構。
2)建立了主操作手的正逆運動學模型,分析了耦合關系,模型驗證了該位姿解耦策略的正確性,同時說明了該位姿解耦設計可有效降低運動學建模過程中運算的復雜程度。
3)為使主操作手具備良好的運動性能,綜合考慮主操作手條件數的大小和波動程度,提出使用綜合性能指標評價主操作手的運動性能;分析了主操作手桿長對評價指標的影響,并通過遺傳算法對主操作手的桿件尺寸進行了優化。優化結果顯示,主操作手的綜合性能指標提高了15.32%,具備良好運動性能的工作空間體積增加到原來的3倍。主操作手在保證充足工作空間的基礎上具備了良好的運動性能,為下一步主操作手樣機搭建、控制系統設計和性能測試打下基礎。
猜你喜歡
環球時報(2022-12-23)2022-12-23 09:28:37
昆明醫科大學學報(2022年1期)2022-02-28 07:45:04
中老年保健(2021年11期)2021-08-22 03:13:36
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
河北畫報(2020年10期)2020-11-26 07:20:50
小學閱讀指南·低年級版(2017年1期)2017-03-13 20:07:35
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
中國醫療美容(2015年1期)2015-07-12 10:06:38
鄭州大學學報(醫學版)(2015年2期)2015-02-27 14:50:54
西南軍醫(2014年5期)2014-04-25 07:42:48