時變故障下四旋翼無人機的自適應容錯控制
2021-06-10 01:04:18鄭俊哲,宋占魁
大連工業大學學報 2021年3期
鄭 俊 哲,宋 占 魁
(大連工業大學 信息科學與工程學院,遼寧 大連 116034)
0 引 言
隨著科學的進步、自動化技術的發展,四旋翼無人機逐步變得智能化、便利化。它可以用于輸電線路巡檢、運送快遞,還可以代替人力在危險系數較高的環境下進行遠程任務[1]。在無人機控制系統中,姿態控制是實現無人機自主飛行的基礎。比如,當無人機在樹林或者叢林等環境下作業,需要靠自身變換姿態來避免與枝條發生碰撞,保證無人機安全作業。當無人機需要在狹窄的環境勘察時,同樣也需要進行姿態控制來規避障礙[2]。其中,姿態控制就是控制四旋翼無人機的3個姿態角(俯仰角、滾轉角、偏航角)穩定的跟蹤期望信號,并保證閉環系統的漸進穩定[3]。由于無人機強耦合的特性,只有保證姿態系統穩定控制,才能使其按照期望軌跡自主飛行。然而,四旋翼無人機在實際的飛行中,姿態會受到外界干擾或者微小故障的影響,會導致無人機飛行偏離期望軌道[4]。所以,需要設計控制器或者觀測器來對系統受到的總的不確定性因素進行估計和補償,從而保證無人機在有外界干擾或者出現故障的情況下對姿態可以有效地控制跟蹤。
四旋翼無人機常見故障包括執行器故障和傳感器故障[5]。其中,執行器故障對無人機的自主飛行有著較大的影響,更難以解決[7-8]。
針對執行器故障下姿態跟蹤控制的研究方法頗多。Sadeghzadeh等[9]采用線性二次調節器,分別加入自適應算法和變增益PID算法。經試驗,加入自適應因子的控制器方便實現,后者變增益算法的抗干擾性較好,具有更好的魯棒性。但是線性控制器受到外界擾動的影響較大,系統難以在一定時間內恢復穩定。李煒等[10]將系統執行器故障程度分段,分別設計不同的補償控制律。對無人機進行實時故障檢測,并判斷其故障程度類型,從而調用對應的控制律進行補償故障損耗。調用控制律會增加控制器對突發狀況的響應速度,導致跟蹤效果變慢。Chen等[11]提出了一種可重構型飛行控制的理論框架,在控制系統中選擇合適的信號對故障進行補償。其算法較為復雜,實現起來困難。劉凱悅等[12]基于滑模控制算法,設計了主動容錯控制器和被動容錯控制器,二者均有很好的容錯控制。但是對于外界擾動,主動容錯控制器的效果更好,被動容錯控制器受外部的環境影響,控制效果變差,而主動容錯控制需要實時的進行故障檢測,較為復雜。孟慶霄等[13]利用擴張觀測器(ESO)設計一種自抗擾控制算法。將無人機的不確定因素擴張為系統狀態,利用有限的模型參數估計“集中擾動”,從而將無人機非線性系統近似化為線性系統進行跟蹤控制。但是,擴張觀測器為了實現高精度觀測,需要較小的采樣時間。竇景欣等[14]在經典控制自抗擾控制算法中,加入模糊誤差反饋控制器,使系統誤差超調量平均減少75%。Shi等[15]利用神經網絡(RBF)逼近外界擾動上界值,自適應滑模策略實現了無人機在線估計并補償執行器故障。其收斂速度快,跟蹤精度高。但是應對突發嚴重失效的情況下,跟蹤誤差會有較大超調量。
現有對故障無人機飛行控制的研究多數都是針對定值故障和擾動進行研究控制,當執行器出現故障時,系統為了維持正常飛行會增加故障執行器的控制力矩,從而更容易導致已經故障的執行器發生更嚴重的失效損耗。
本研究從控制算法的角度,針對時變故障和外界擾動問題,設計一種自適應滑模容錯控制器。針對姿態模型中的不確定項,引入Nussbaum增益函數;針對外界擾動,設計自適應因子對其進行補償;針對輸出受限問題,利用障礙李雅普諾夫函數進行嚴格數學證明,保證姿態角滿足約束條件。通過與不同方法進行仿真實驗對比,驗證所設計控制器的優越性和魯棒性。
1 建模與設計方案
描述四旋翼無人機模型,須建立慣性坐標系{xe,ye,ze}和體坐標系{xb,yb,zb},如圖1所示。其中{F1,F2,F3,F4}和{ω1,ω2,ω3,ω4}分別是無人機4個電機向上的升力和轉速,{φ,θ,ψ}分別表示無人機的橫滾角、俯仰角、偏航角。
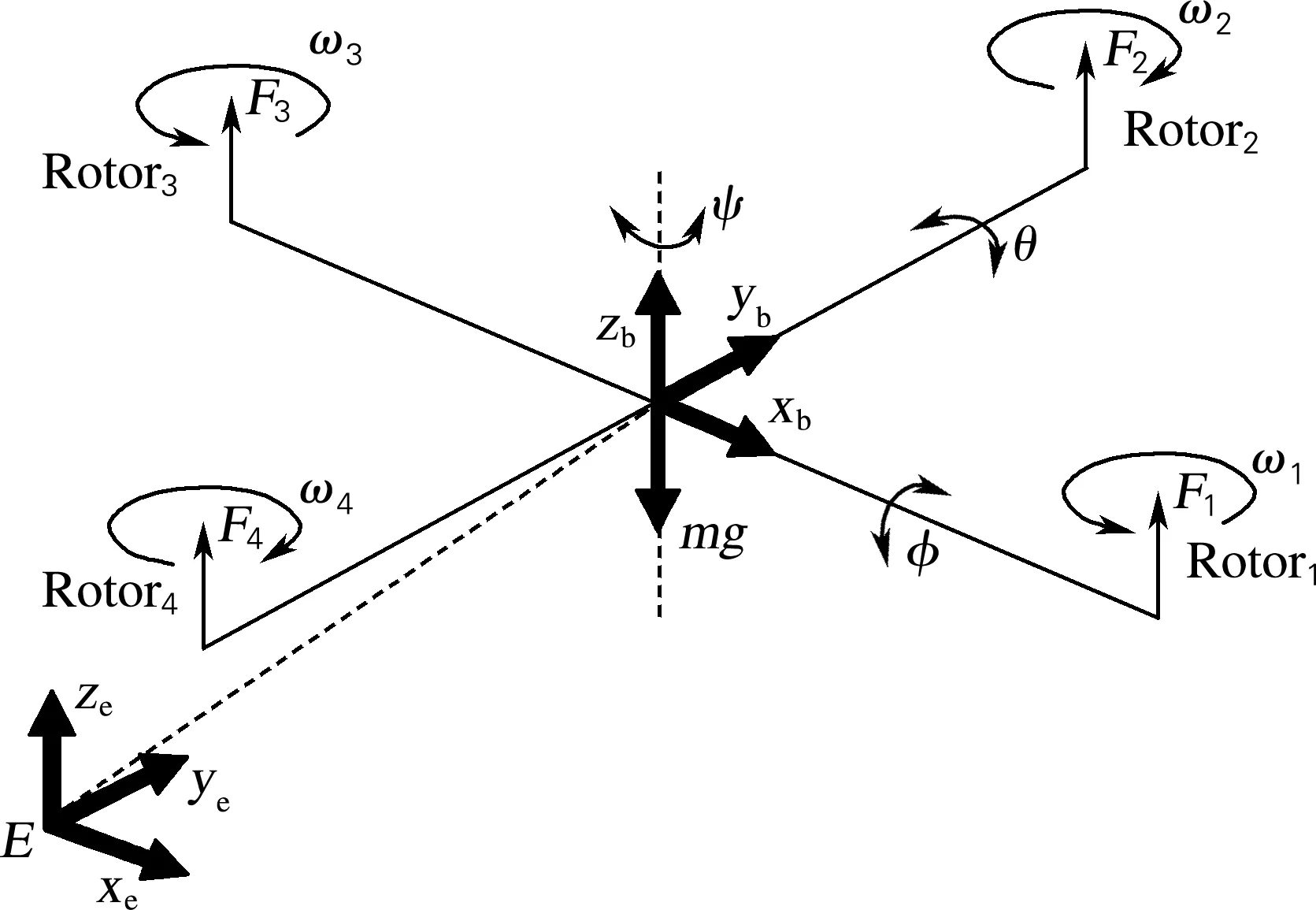
圖1 四旋翼無人機坐標體系示意圖Fig.1 Diagram of coordinate system of four-rotor UAV
忽略空氣阻力,參考文獻[16]引入模型:
(1)
式中:Ix、Iy、Iz分別為坐標系x、y、z軸的轉動慣量,l為旋轉子與無人機質心之間的距離,m為無人機的質量,g為重力加速度,di(i=1,2,…,6)為不確定的外部干擾,Ui(i=1,2,3,4)分別為高度、橫滾、俯仰和偏航通道上的控制力矩。
假設1無人機整體幾何中心是無人機的重心,其飛行速度低,不考慮氣動效應的影響。

假設3系統中的所有狀態參數均可測量。
當四旋翼無人機在長時間處于飛行模式,容易引起故障,此時外界的干擾會加劇系統的不穩定[17]。當無人機出現故障的情況下,由此引起執行器機構的失效。把機構失效間接轉化為控制輸入的損失,將其作為故障因子以乘積的形式加到無人機模型中[18]。將式(1)改進后得到
(2)
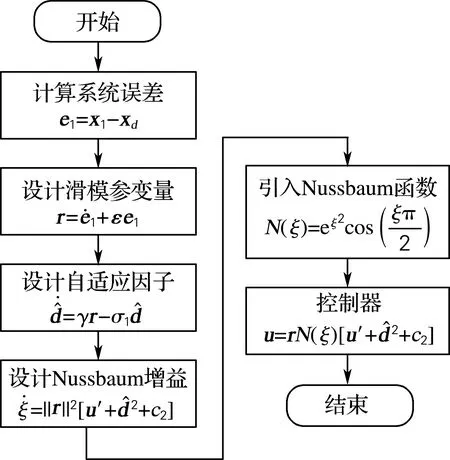
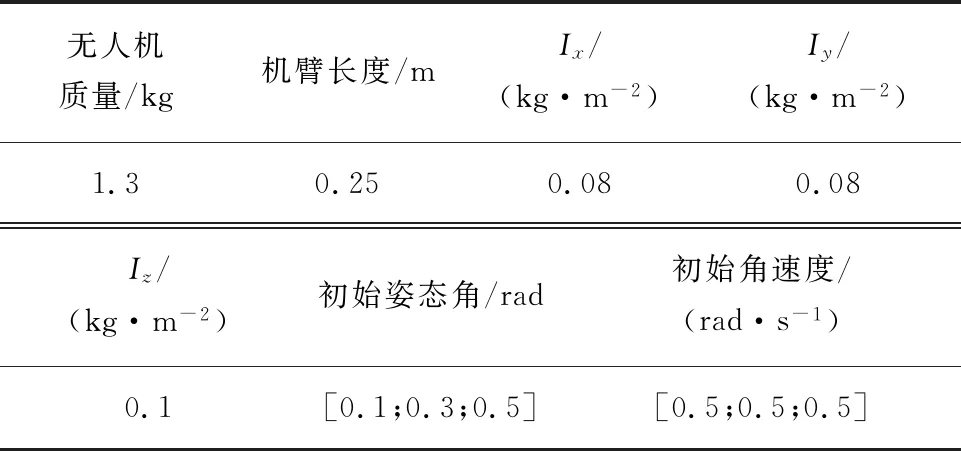
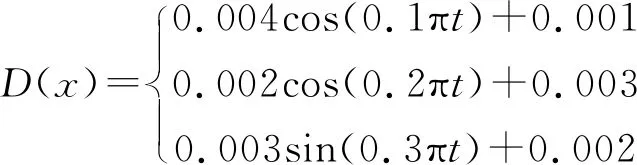
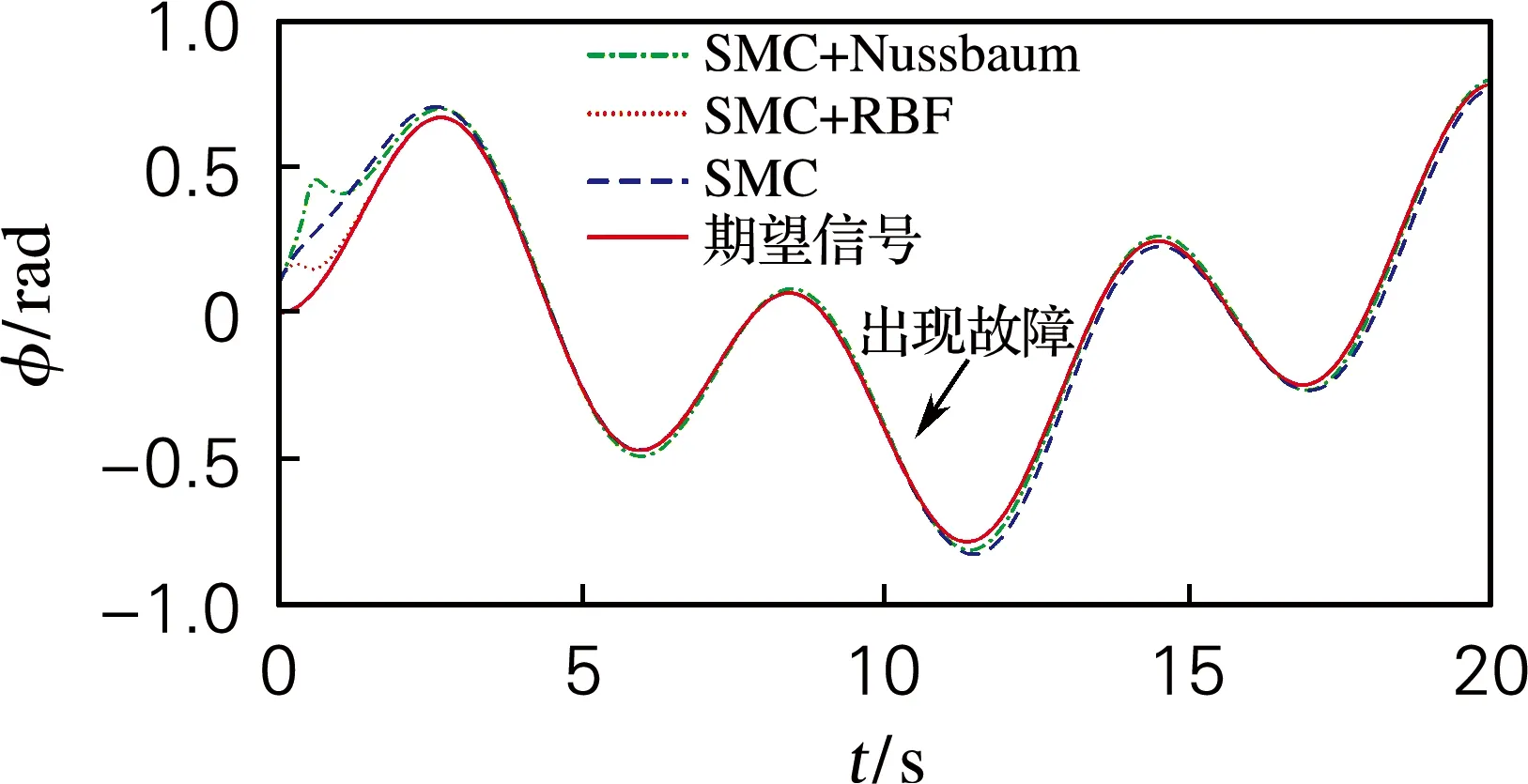
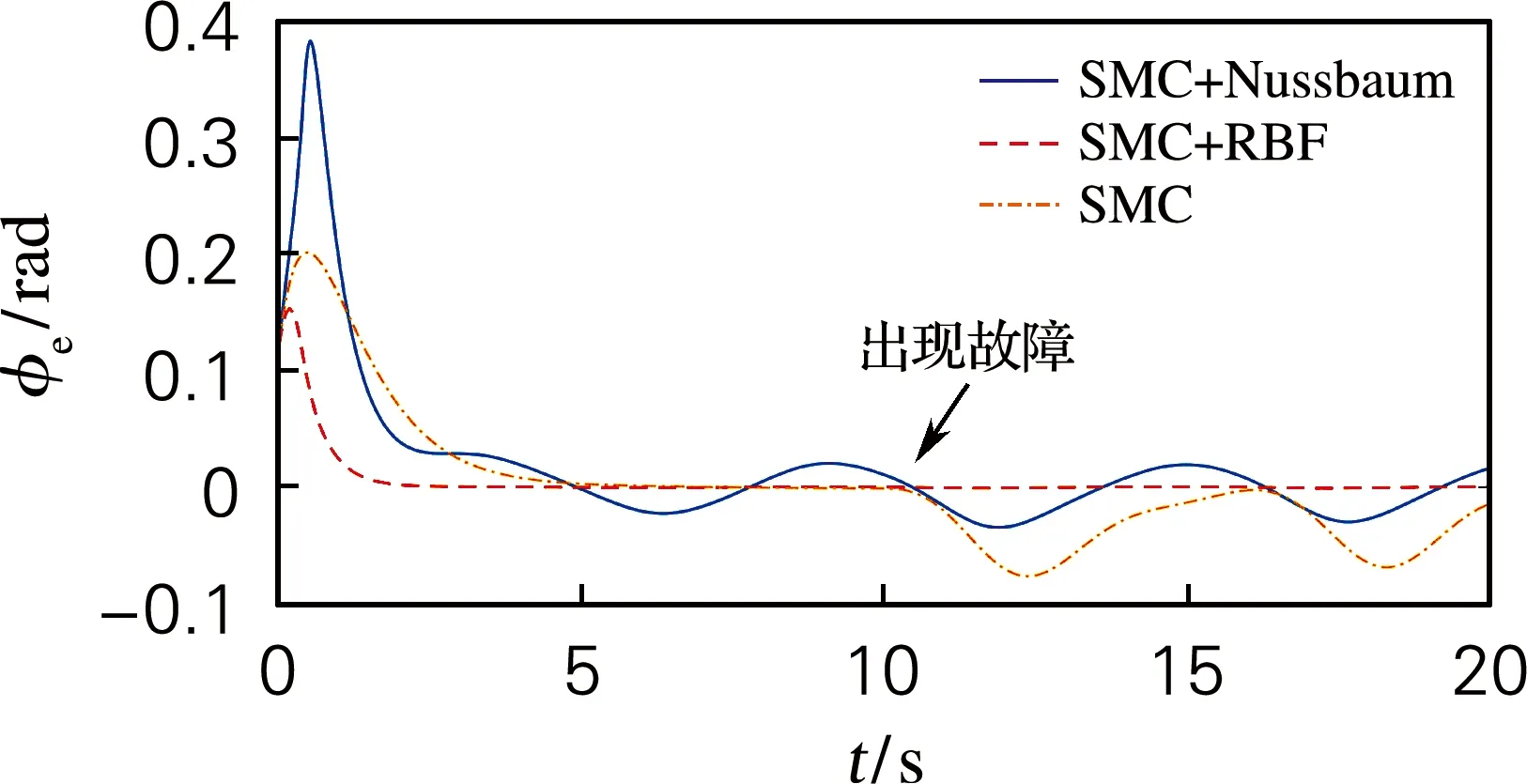
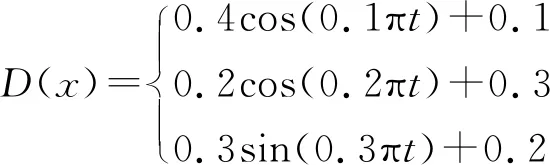
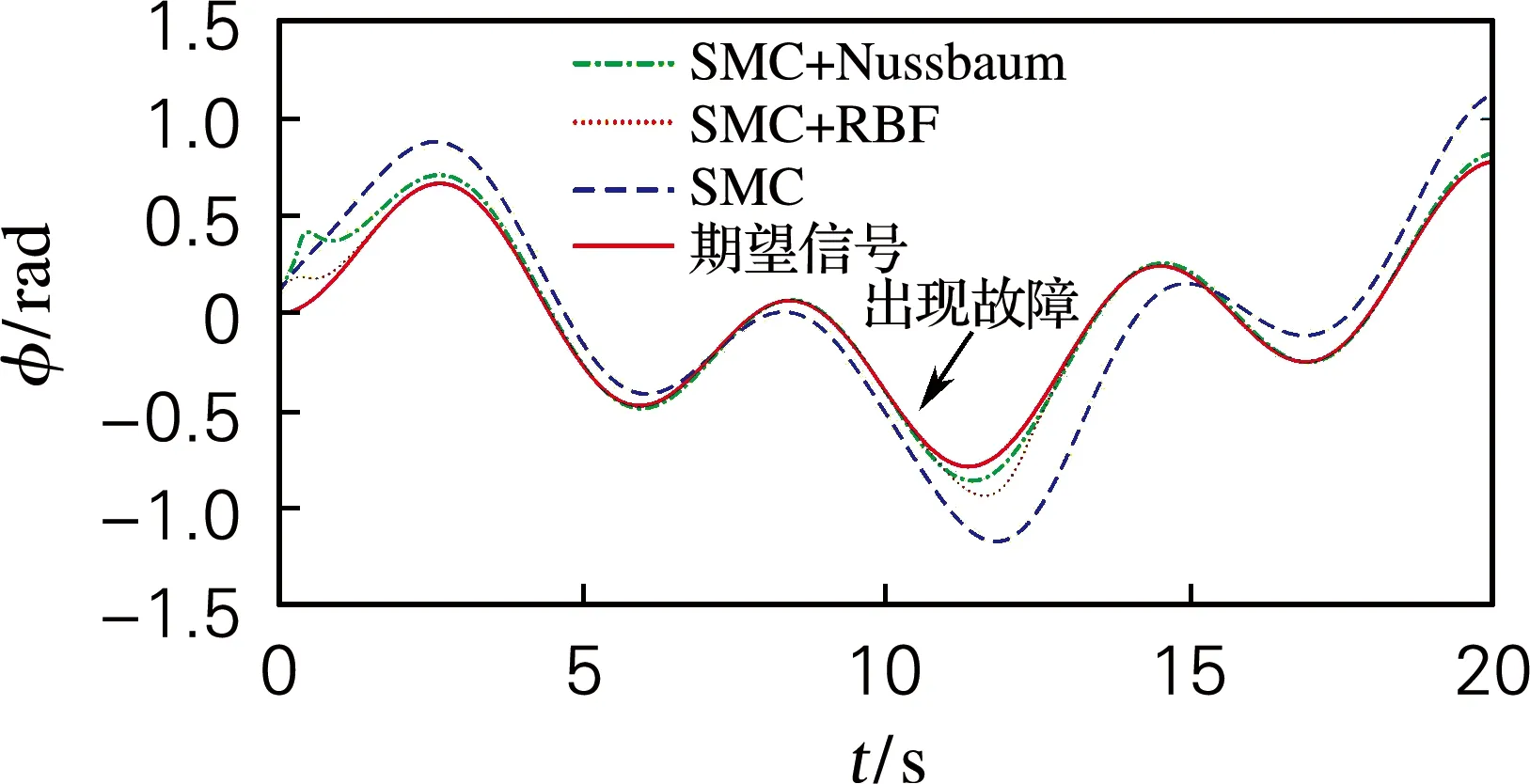
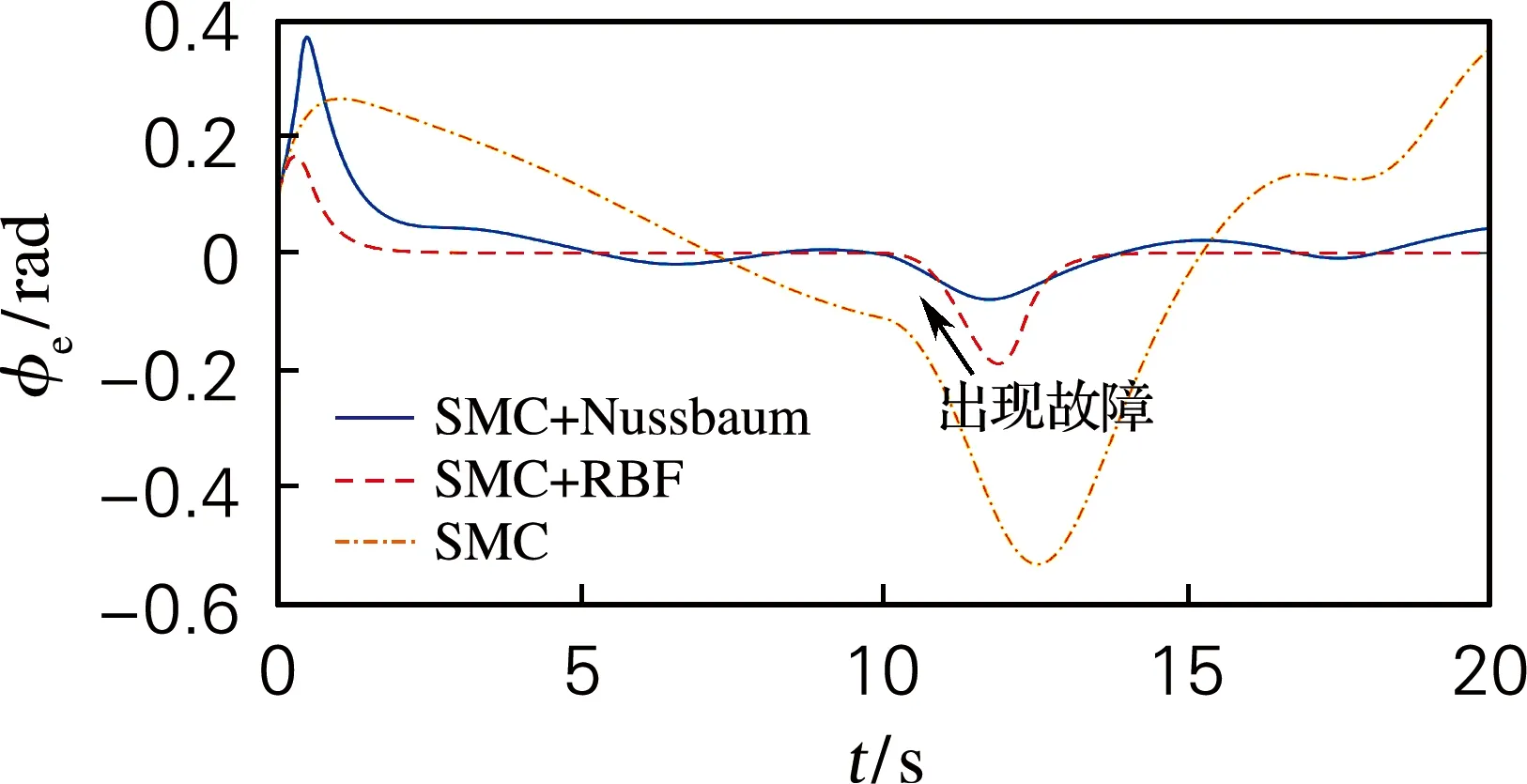
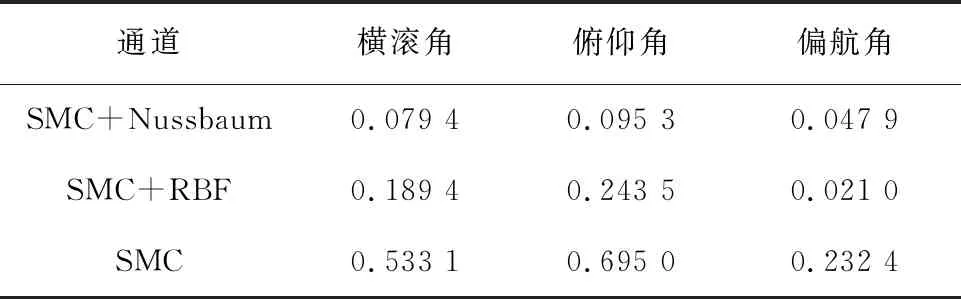
式中:狀態x1=[x11,x12,x13],x2=[x21,x22,x23];擾動d=[d1,d2,d3]。bi(i=1,2,3)為執行機構的效率損失折合為控制輸入的損失系數,0 為了便于后續研究,將轉動慣量和損失系數的乘積g(x)bi看作一個整體未知參變量G(x)。將式(2)整理后得 (3) 為了解決不確定矩陣G(x),在控制器引入Nussbaum增益函數。 任意連續函數N(s),滿足下列屬性,就稱其為Nussbaum增益函數。 (4) (5) 選擇如下形式的Nussbaum增益函數: (6) 引理1[19]?tf∈R,在區間[0,tf)內定義光滑函數V(·)和ζ(·),且V(t)≥0,?t∈[0,tf),N(·)是光滑的Nussbaum增益函數。如果滿足不等式 (7) 引理3[21]對于任意正數Kb∈R,任意矩陣Z∈R,且滿足∣Z∣ (8) 控制目標:在G(x)和d未知的情況下,設計一個自適應滑模控制器,使輸出狀態x1能夠跟蹤期望信號xd,并保證閉環系統所有信號有界且系統誤差e1=x1-xd滿足范圍內約束。其設計自適應滑模控制器的算法流程如圖2所示。 圖2 算法流程圖Fig.2 The flow chart of algorithm 為了實現控制目標,將系統誤差定義為 e1=x1-xd (9) 式中:對于期望給定信號xd=[xd1,xd2,xd3],存在正常數kdi(i=1,2,3)滿足|xdi| 根據系統模型見式(3),系統誤差一階導數和二階導數為 (10) (11) 設計一個滑模參量r來描述系統誤差變化,將r定義為 (12) 式中:ε為滑模參變量,ε>0。 對式(12)進行時間求導得 (13) 為了設計滑模參變量控制器,選用李雅普諾夫函數: (14) 給出的李雅普諾夫函數的時間導數為 (15) 代入式(10)~(13)得 (16) 根據young不等式[21],可建立以下關系: (17) (18) (19) (20) 式(16)進一步可表達為 (21) 控制器選擇為 (22) (23) (24) (25) 式中:c2>0、γ>0、σ1>0是待設計參數,將式(22)~(25)帶入式(21)得 (26) (27) 帶入式(26)化簡: [α(x)N(ζ)+1] (28) 為了分析方便,定義: (29) (30) 利用c3、c4定義簡化(28)式可得 (31) 在區間[0,t]內積分得: (32) 綜上所述,閉環系統的信號均為有界的,可以得出結論,閉環系統是漸進穩定的。 定理1執行器故障下的無人機系統模型,設計控制器如式(22)~(25)所示,若滿足假設1~3,則系統滿足輸出約束條件且所有信號均有界。 證明定理: 為了系統初始誤差滿足|e1i(0)| (33) 根據式(12)可得 (34) 對式(33)進行時間求導,將式(34)帶入,得 (35) (36) 對式(36)進行積分: (37) 將式(33)帶入式(37)得 (38) 求得誤差界限為 (39) 已知期望信號xd的給定范圍為|xd| -Kb-Kd (40) 定義Kb+Kd=A,狀態x1范圍表示為|x1| 由式(39)可知,跟蹤誤差的精度取決于參數ε,當參數ε選取較大時,跟蹤誤差將會很小,但過大的參數ε又會引發控制信號的幅值增大和高頻振動,在實際應用時需要通過試湊法找到滿足控制精度同時又不會導致控制信號高頻振動的參數ε。 使用Simulink仿真平臺,來驗證本文設計的控制器的有效性和自適應能力。其中,所設計的控制器仿真需要的具體參數如表1所示。 表1 模型參數以及初始化參數Tab.1 Model parameters and initial parameters 目前針對四旋翼無人機的容錯控制以及抗擾動研究的主流控制算法有魯棒控制算法[3]、自適應控制算法[7-8]以及滑模控制算法[12,15],其中基于滑模算法的相關控制方法對系統參數變化和外界擾動不靈敏,無須系統在線辨識。便于工程實際應用且算法復雜度低容易實現,更具有代表性。所以,將設計的基于Nussbaum增益函數的自適應滑模控制器(SMC+Nussbaum)與Shi等[15]提出的基于神經網絡的自適應滑模控制器(SMC+RBF)和劉凱悅等[12]使用的滑模控制器(SMC)進行仿真對比,觀察不同控制器對期望信號(Reference Signal)的跟蹤軌跡和跟蹤誤差。 為了證明控制器在應對突發時變故障時跟蹤效果的優越性。選擇相同期望信號角度:φd=0.8×sin(0.7t)×sin(0.4t);θd=0.8×sin(0.7t);ψd=0.5×[1-sin(0.6t)]×sin(0.7t)。控制器參數:ε=1.5,c2=3.5,σ1=10,γ=1.5。 主要研究內容是控制器在時變故障下能更好地適應環境,在較短時間內對其做出估計和補償,使誤差保持在平衡點附近鄰域[-0.1,0.1]內,恢復控制系統進行有效跟蹤。針對上述3個控制器,分別做兩個仿真實驗,通過增加故障和外界干擾程度,來觀察每個控制器的跟蹤效果。 仿真1在執行機構小部分失效和存在較小的外部干擾的情況下: (41) (42) 仿真將模型始終處在時變擾動中,在第10 s,執行器出現部分失效。圖3表示3種方法對期望信號的跟蹤軌跡對比。圖4分別表示3個通道的跟蹤誤差。從圖5可以看到,所設計的控制器在開始跟蹤時有較大的超調量,但是可以在有限時間內快速做出響應達到跟蹤穩定。在出現突發故障時,跟蹤誤差始終保持在平衡點附近的鄰域內。 (a) 橫滾角 基于神經網絡的滑模控制算法,在開始跟蹤時,跟蹤速度較快,更能達到無誤差效果。但是當突發時變故障時,跟蹤效果變差,出現較大的波動。而自適應滑模算法在出現故障時,跟蹤誤差同樣存在較大超調量,跟蹤速度較慢。 表2為出現故障時,3種控制算法分別對3個通道跟蹤誤差的超調量數值。由表2的數據可以看出發生突變故障時所提出的控制算法超調量較小,對{φ,θ,ψ}的跟蹤上有著更好的效果。 表2 輕微故障和擾動下誤差超調量Tab.2 Error overshoot under minor faults and perturbations rad 仿真2在執行機構大部分失效和存在較大的外部干擾的情況下: (a) 橫滾角 (43) (44) 仿真依舊將模型始終處在時變擾動中,在第10 s開始執行器開始部分失效。此次,增大了外界擾動和失效程度。圖5表示在嚴重故障失效和干擾的情況下,無人機的跟蹤軌跡情況,圖6表示3個通道的跟蹤誤差。 (a) 橫滾角 在開始跟蹤時,所設計的控制器跟蹤效果雖有小幅度波動,但是在5 s左右消除外界干擾的影響,恢復穩定的跟蹤控制。在故障出現初期,有較大的跟蹤誤差,主要由于控制力矩不能完全作用于無人機上,但通過短時間的調整,系統跟蹤誤差又回到了設計精度范圍內,這主要是由于控制器中的Nussbaum增益發揮了功效,補償了系統所丟損失掉的功率。而在受到突變故障時,帶有神經網絡的滑模算法的跟蹤誤差有著較大的超調量。自適應滑模算法響應速度過慢、跟蹤誤差變大,已經無法準確跟蹤到期望信號。相比之下,所設計的控制算法,在受到嚴重失效的狀態下,可以在短時間內做出相應。依舊保證3個通道的誤差精度在平衡點附近鄰域內。表3表示出現嚴重失效故障時每種控制算法對3個通道跟蹤誤差的超調量數值。可見,所提出的控制器其適應外界突發狀況的能力相比之下更優越。 (a) 橫滾角 表3 嚴重故障和擾動下誤差超調量Tab.3 Error overshoot under maximum faults and disturbances rad 和仿真1的圖表對比,可以看出即便是增加了外界干擾和失效程度。在開始跟蹤時,所設計的控制器仍舊在5 s左右實現穩定控制。系統在設定10 s開始引入部分失效時,系統可以在短時間內調整,使得跟蹤誤差一直在平衡點附近的鄰域內,不影響無人機正常運作。由兩個仿真情況對比可以得出,所設計的控制器相比另外兩種方法,在突發時變故障情況下有著較強的適應突發故障的能力和良好的跟蹤效果。 為了解決時變故障下無人機姿態跟蹤的問題,設計一種自適應滑模容錯控制器。引入Nussbaum增益函數和自適應滑模因子來補償無人機系統故障所損失掉的功率和外界的干擾,從而實現無人機的姿態跟蹤。通過增加故障和外界干擾程度,將設計的控制器同其他現有控制算法同時進行仿真實驗。所設計的控制器在5 s左右可消除外界的擾動,恢復系統的正常跟蹤。當出現突發故障時,系統能短時間做出響應,4 s左右恢復正常跟蹤。且跟蹤誤差保持在平衡點附近鄰域[-0.1,0.1]內,保證無人機不受故障影響,安全飛行。所設計的控制器有良好的容錯能力和較強的魯棒性。該研究結果將對無人機飛行控制系統領域提供理論依據。

2 自適應滑模控制器設計





3 跟蹤誤差的穩定性分析


4 Simulink仿真

5 結 論
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58汽車維修與保養(2019年7期)2020-01-06 03:30:42藝術啟蒙(2018年7期)2018-08-23 09:14:18家庭影院技術(2017年9期)2017-09-26 03:41:45海峽姐妹(2017年7期)2017-07-31 19:08:17Coco薇(2017年5期)2017-06-05 08:53:16汽車維護與修理(2016年10期)2016-07-10 08:17:41汽車維修與保養(2015年6期)2015-04-17 03:31:50