攔截高速機(jī)動目標(biāo)的捕獲區(qū)及微分對策導(dǎo)引律*
2021-06-07 08:39:10毛柏源李君龍張鵬飛
國防科技大學(xué)學(xué)報 2021年3期
關(guān)鍵詞:對策
毛柏源,李君龍,張 銳,張鵬飛
(北京電子工程總體研究所, 北京 100854)
近年來,高速機(jī)動目標(biāo)攔截技術(shù)逐漸成為現(xiàn)代防御系統(tǒng)的研究熱點(diǎn),傳統(tǒng)的比例導(dǎo)引律已在低速非機(jī)動目標(biāo)的攻擊場景中獲得了廣泛的應(yīng)用,并且效果良好。但對于高速機(jī)動目標(biāo)的攔截,比例導(dǎo)引并不適用,因此對機(jī)動目標(biāo)攔截的導(dǎo)引律研究具有重要意義。
文獻(xiàn)[1-2]基于非奇異終端滑模控制理論設(shè)計了碰撞角約束下的滑模導(dǎo)引律,能夠使系統(tǒng)狀態(tài)在有限時間收斂。文獻(xiàn)[3]基于零化視線轉(zhuǎn)率,針對機(jī)動目標(biāo)攔截問題,提出一種非線性微分幾何導(dǎo)引律,采用非線性控制理論削弱了目標(biāo)機(jī)動帶來的影響。文獻(xiàn)[4]采用最優(yōu)控制方法實(shí)現(xiàn)了在時間和角度同時約束條件下對機(jī)動目標(biāo)和非機(jī)動目標(biāo)的攔截。
相對于其他導(dǎo)引律,微分對策導(dǎo)引律的優(yōu)勢在于其只需要目標(biāo)的機(jī)動能力,而不需要其未來的具體機(jī)動形式。文獻(xiàn)[5]將機(jī)動目標(biāo)攔截問題轉(zhuǎn)化為零和微分對策問題,并得到了狀態(tài)依賴?yán)锟ǖ傥⒎址匠痰慕猓瑥亩茖?dǎo)了微分對策導(dǎo)引律,該導(dǎo)引律不需要對剩余時間進(jìn)行精確估計。文獻(xiàn)[6]將微分對策導(dǎo)引律應(yīng)用于多導(dǎo)彈協(xié)同攔截問題,多個導(dǎo)彈共同組成對策一方,得到的導(dǎo)引律使得導(dǎo)彈組從不同角度對目標(biāo)實(shí)施攔截。文獻(xiàn)[7]通過引入適當(dāng)?shù)男阅芎瘮?shù),將魯棒控制轉(zhuǎn)化為兩人零和微分對策問題,仿真驗(yàn)證了所提出魯棒導(dǎo)引律的有效性。文獻(xiàn)[8]針對固定末端時刻攔截機(jī)動目標(biāo)的制導(dǎo)系統(tǒng),構(gòu)建了非線性有限時間微分對策框架,利用一個具有時變權(quán)值和激活函數(shù)的評價網(wǎng)絡(luò)來逼近哈密頓-雅可比方程(Hamilton-Jacobi-Isaacs, HJI)方程的解,得到了基于自適應(yīng)最優(yōu)控制的有限時間微分對策制導(dǎo)律。從目前文獻(xiàn)來看,微分對策導(dǎo)引律已被廣泛應(yīng)用于協(xié)同制導(dǎo)以及機(jī)動目標(biāo)攔截等領(lǐng)域,但將其應(yīng)用于捕獲區(qū)的研究較少。
捕獲區(qū)作為制導(dǎo)性能的一種評價依據(jù),對它的深入研究意義重大,文獻(xiàn)[9]推導(dǎo)了順軌和逆軌的零控攔截條件,并得到了比例和反比例的捕獲區(qū)。文獻(xiàn)[10]通過引入彈目相對運(yùn)動的單位角動量,將傳統(tǒng)的捕獲區(qū)描述轉(zhuǎn)化為捕獲長度描述,推導(dǎo)了三維空間內(nèi)的理想比例導(dǎo)引律的捕獲區(qū)。但上述捕獲區(qū)的推導(dǎo)均是基于比例導(dǎo)引律,在機(jī)動目標(biāo)攔截場景中的應(yīng)用受到限制。
針對機(jī)動目標(biāo)攔截時,彈目均具有任意階動力學(xué)特性的情形,本文基于微分對策理論推導(dǎo)了一種線性化攔截場景中的解析形式捕獲區(qū),并具體到直/氣復(fù)合控制導(dǎo)彈對機(jī)動目標(biāo)的攔截中,之后重新選取性能指標(biāo),將目標(biāo)與直/氣復(fù)合控制導(dǎo)彈在末端帶有碰撞角約束的制導(dǎo)問題轉(zhuǎn)化為零和微分對策問題,通過求解彈目最優(yōu)攔截策略,將鞍點(diǎn)解的存在條件轉(zhuǎn)化為制導(dǎo)增益的約束問題。仿真驗(yàn)證了幾種情形下直/氣復(fù)合控制導(dǎo)彈對目標(biāo)實(shí)施攔截的捕獲區(qū)存在域,同時,導(dǎo)引律仿真結(jié)果表明微分對策制導(dǎo)方法在目標(biāo)機(jī)動形式未知的情形下能夠?qū)崿F(xiàn)多種碰撞角約束的預(yù)期攔截。
1 彈目運(yùn)動描述
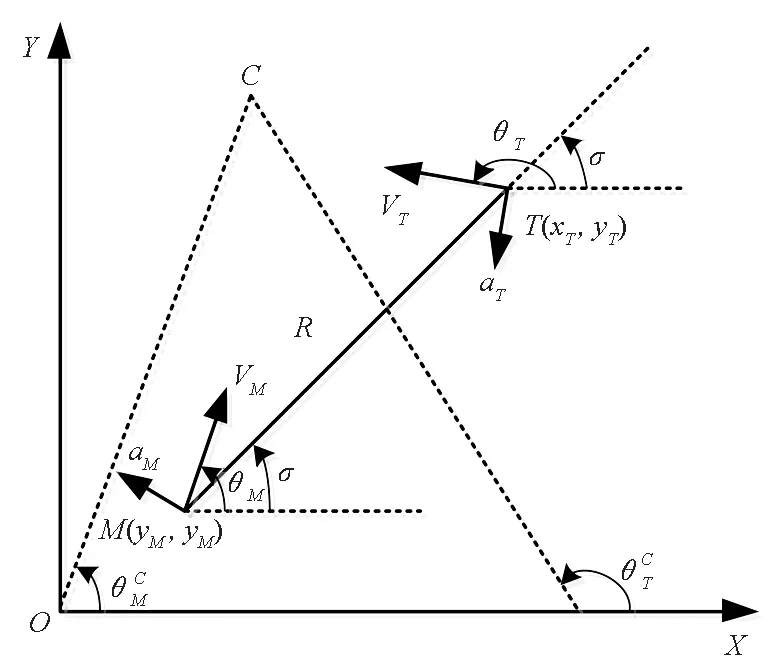
圖1 彈目攔截幾何示意圖Fig.1 Schematic of missile-target planar interception geometry
x=xT-xM
(1)
y=yT-yM
(2)
(3)
(4)
(5)
(6)
由導(dǎo)彈、目標(biāo)在XOY平面內(nèi)的相對位置可知,彈目交匯可看作沿x軸方向逐漸接近的運(yùn)動,y軸方向上的位移差可看作是脫靶量。定義末制導(dǎo)剩余時間為tgo=tf-t,初始時刻為t0,當(dāng)導(dǎo)彈擊中目標(biāo)時,設(shè)t=tf,此時彈目相對法向速度為零,則
VTsin(θT-σ)=VMsin(θM-σ)
(7)
為不失一般性,本文的研究基于以下假設(shè)。
假設(shè)1在末制導(dǎo)階段,認(rèn)為導(dǎo)彈和目標(biāo)速度大小不變,并且彈目機(jī)動相對于兩者的速度為小量。
假設(shè)2認(rèn)為導(dǎo)彈和目標(biāo)的控制輸入均有界。
假設(shè)3末制導(dǎo)過程中,導(dǎo)彈和目標(biāo)偏離初始碰撞三角形較小。
根據(jù)假設(shè)3,引入一個小量
(8)
式中,j∈{T,M},本文中下標(biāo)j含義相同。
則得到
(9)
結(jié)合式(4)、式(7)、式(9)可得
(10)
結(jié)合式(5)、式(6)、式(10)可得
(11)
通常,在帶有碰撞角度約束的攔截場景中,碰撞角度定義為導(dǎo)彈擊中目標(biāo)時其速度矢量與目標(biāo)速度矢量的夾角,即
(12)

考慮一類系統(tǒng)的任意階控制動力學(xué)方程,則
(13)

(14)

(15)

(16)
為后續(xù)推導(dǎo)方便,選取如下狀態(tài)變量
(17)
根據(jù)式(5)、式(6)、式(11)、式(12)及式(13)可得到導(dǎo)彈與目標(biāo)相對運(yùn)動方程如下
(18)
式中

2 捕獲區(qū)存在條件分析
2.1 復(fù)合控制導(dǎo)彈末制導(dǎo)段捕獲區(qū)分析
為研究方便,采用文獻(xiàn)[11]中的終端投影方法,對式(18)進(jìn)行降階處理。
(19)
式中,Z(t)為降階處理后重新定義的狀態(tài)向量,該向量的物理意義是導(dǎo)彈與目標(biāo)從當(dāng)前時刻開始不加任何控制,直至彈目遭遇所產(chǎn)生的脫靶量和碰撞角。其中,z1(t)代表零控脫靶量(Zero Effort Miss distance,ZEM),z2(t)代表零控碰撞角(Zero Effort impact Angle,ZEA)。Φ(tf,t)為系統(tǒng)式(18)的狀態(tài)轉(zhuǎn)移矩陣,D為常數(shù)矩陣,其取值如下
(20)
對式(19)求導(dǎo)可得

=DΦ(tf,t)(BMuM+BTuT)
(21)
系統(tǒng)降階后,首先研究z1(t)與彈目雙方機(jī)動策略之間的關(guān)系。由式(21)可設(shè)
(22)
式中,fM(tf,t)?D1Φ1(tf,t)BM1,fT(tf,t)?D1Φ1(tf,t)BT1,其中D1、Φ1(tf,t)、BM1、BT1為式(17)選擇前四個狀態(tài)變量時對應(yīng)的矩陣。
基于z1(t)選取如下性能指標(biāo)函數(shù)
Jz1=|z1(tf)|
(23)
根據(jù)式(22)構(gòu)造哈密頓函數(shù)
=λz1[fM(tf,t)uM+fT(tf,t)uT]
(24)
式中,λz1為待定的拉格朗日乘子。
則彈目最優(yōu)攔截策略為

(25)

(26)
協(xié)態(tài)方程及橫截條件為
(27)
可得
λz1=sign[z1(tf)]
(28)
結(jié)合以上條件,將式(22)從t到tf積分,得到z1(t)的最優(yōu)軌跡為
(29)
其中
(30)
針對目標(biāo)機(jī)動未知的情形,為了研究對策雙方在攔截末段的捕獲區(qū)存在條件,首先給出捕獲區(qū)定義及相關(guān)引理如下。
定義1具有非零初始條件的攔截彈能夠?qū)δ繕?biāo)實(shí)現(xiàn)精確攔截的空間區(qū)域稱為捕獲區(qū)。
(31)
引理1[12]在線性一對一攔截情形中,捕獲區(qū)存在的充分必要條件是
?t∈[t0,tf]
(32)
定理1當(dāng)系統(tǒng)式(13)描述對策雙方的自動駕駛儀動態(tài)特性,且最優(yōu)攔截軌跡滿足式(29)時,在一對一攔截情形中必然存在如下形式的捕獲區(qū)。
證明:針對系統(tǒng)式(13),可得出其傳遞函數(shù)為
(34)
本文為了方便研究,將其中任一傳遞函數(shù)簡化為
(35)
(36)

對式(22)中的D1Φ1(tf,t)Bj1進(jìn)行拉普拉斯反變換可得
D1Φ1(tf,t)Bj1=D1Φ1(tf-t)Bj1
(37)
則由fj(tf,t)?D1Φ1(tf,t)Bj1可得
(39)
(40)
由式(39)、式(40)可知
(41)
根據(jù)引理1可知,式(41)滿足捕獲區(qū)存在條件。因此,若選擇了系統(tǒng)式(13)描述的對策雙方自動駕駛儀動態(tài)特性,則在一對一攔截情形中必然存在捕獲區(qū),下面將推導(dǎo)捕獲區(qū)的解析表達(dá)式。
本文基于直/氣復(fù)合控制攔截彈,主要研究在線性一對一攔截情形中的捕獲區(qū)存在條件。結(jié)合定理1,分別選擇導(dǎo)彈與目標(biāo)的自動駕駛儀動態(tài)特性傳遞函數(shù)如下
(42)
(43)
(44)
(45)
則由式(22)可得
(46)
將式(25)、式(26)代入式(46),并對t從0到tgo積分,得到

(47)
式中
(48)

□
2.2 基于碰撞角約束的微分對策問題研究
2.1節(jié)定性分析了復(fù)合控制導(dǎo)彈對于機(jī)動目標(biāo)在攔截末段的捕獲區(qū)問題,本節(jié)針對式(18)所示的系統(tǒng),主要研究基于直/氣復(fù)合控制的攔截彈與機(jī)動目標(biāo)在末制導(dǎo)段帶終端碰撞角約束的微分對策問題。
設(shè)性能指標(biāo)如下
(50)

(52)
(53)
uM[τε1Mg2(τM)+τε2M]/VM
(54)
(55)
由協(xié)態(tài)方程及橫截條件可得
(56)
基于以上條件可得彈、目最優(yōu)攔截策略為
(58)
將式(57)、式(58)代入式(53)、式(54),并從t到tf積分,可得末端時刻狀態(tài)
(59)
(60)
式中

[(τε1Mg1(τM)+τε2Mtgo)×
(62)

[(τε1Mg2(τM)+τε2M)/VM]2}dφ
(63)
(64)
再將式(59)、式(60)代入式(57)、式(58)可得導(dǎo)彈、目標(biāo)最優(yōu)攔截策略表示為零控脫靶量與零控碰撞角誤差的線性組合形式
(65)
(66)
式中,tgo代表剩余飛行時間,其由彈目距離除以彈目相對速度沿視線的分量得到,KM1、KM2、KT2、KT2代表制導(dǎo)增益。
(68)
(69)
(70)
對于彈目雙方零和微分對策問題,鞍點(diǎn)解存在當(dāng)且僅當(dāng)系統(tǒng)式(18)對應(yīng)的下列里卡蒂微分方程的解有限。
(71)
式中,P(tf)=diag(c0,0,0,0,c1),而P(t)有限的充分條件是制導(dǎo)增益有界,故當(dāng)式(67)~(70)有界的情況下才存在鞍點(diǎn)解。通過對性能指標(biāo)式(50)分析可知,只有當(dāng)c0,c1→∞時才滿足理想攔截情形,故參數(shù)c0,c1的選取需要綜合制導(dǎo)增益與性能指標(biāo)進(jìn)行確定。
由于微分對策中鞍點(diǎn)解的存在要求制導(dǎo)增益KM1、KM2、KT1、KT2有界,故應(yīng)從制導(dǎo)增益與c0,c1的關(guān)系來著手分析選取原則。首先,考慮滿足脫靶量指標(biāo)c0→∞,而c1取為有限值時的制導(dǎo)增益變化趨勢;然后,進(jìn)一步分析目標(biāo)無機(jī)動c2→∞,此時制導(dǎo)增益隨c1取值的變化趨勢,由此可以得到使制導(dǎo)增益有界,即分母不為零的約束方程,從而反向推導(dǎo)c0,c1的取值范圍。
3 仿真分析
本節(jié)首先基于式(49)給出的彈目沿最優(yōu)攔截軌跡運(yùn)動時的捕獲區(qū)解析式進(jìn)行了仿真驗(yàn)證,之后,將目標(biāo)與直/氣復(fù)合控制導(dǎo)彈在末端帶有碰撞角約束的制導(dǎo)問題轉(zhuǎn)化為零和微分對策問題,并對導(dǎo)引律進(jìn)行仿真分析。
情形1:攔截彈采用直/氣復(fù)合控制與純氣動力控制捕獲區(qū)對比分析,仿真結(jié)果如圖2所示。
圖2 捕獲區(qū)分析:情形1Fig.2 Analysis of capture zones: scenario 1
圖2為攔截彈采用直/氣復(fù)合控制與純氣動控制情形下在Zτ=0軸上方的捕獲區(qū)范圍,全域內(nèi)捕獲區(qū)關(guān)于Zτ=0軸上下對稱。仿真結(jié)果表明,采用復(fù)合控制時的捕獲區(qū)范圍遠(yuǎn)大于采用純氣動力控制的,這也說明直/氣復(fù)合控制導(dǎo)彈在攔截末段具有更大的優(yōu)勢。
圖3 捕獲區(qū)分析:情形2Fig.3 Analysis of capture zones: scenario 2
情形3:攔截彈的直接力作用裝置安裝于質(zhì)心前后時的捕獲區(qū)對比分析,仿真結(jié)果如圖4所示。
圖4 捕獲區(qū)分析:情形3Fig.4 Analysis of capture zones: scenario 3
情形4:攔截彈與目標(biāo)的最大機(jī)動能力比值μ1對捕獲區(qū)的影響分析,仿真結(jié)果如圖5所示。
圖5 捕獲區(qū)分析:情形4Fig.5 Analysis of capture zones: scenario 4
圖5表明,當(dāng)μ1<1之后,導(dǎo)彈對目標(biāo)的捕獲區(qū)迅速減小,表明攔截彈需要更大的機(jī)動能力以確保對目標(biāo)具有足夠大的捕獲區(qū)。
針對本文提出的微分對策導(dǎo)引律,首先在不同碰撞角約束下進(jìn)行仿真驗(yàn)證。為了進(jìn)一步驗(yàn)證本文提出的微分對策導(dǎo)引律的性能,與文獻(xiàn)[16]中的最優(yōu)導(dǎo)引律(Optimal Guidance Law,OGL)、文獻(xiàn)[17]中的自適應(yīng)滑模導(dǎo)引律(Adaptive Sliding Mode Guidance Law, ASMGL)進(jìn)行對比仿真,本文的記為微分對策導(dǎo)引律(Differential Game Guidance Law, DGGL)。從末制導(dǎo)時刻開始,機(jī)動目標(biāo)的初始位置為(30 km,15 km),目標(biāo)速度為VT=1 500 m/s。攔截導(dǎo)彈的初始位置為(0 km,12 km),速度為VM=900 m/s。仿真參數(shù)取值為c0=105,c1=108,c2=5,θM=10°,θT=180°。
五種碰撞角約束下的微分對策導(dǎo)引律仿真結(jié)果如圖6~10所示。
由圖6~10可知,本文提出的微分對策導(dǎo)引律在不同的碰撞角約束下均能實(shí)現(xiàn)預(yù)期攔截,并且零控脫靶量及零控碰撞角誤差均能收斂到零附近,同時導(dǎo)彈的指令加速度不超過6g,這表明該導(dǎo)引律魯棒性良好,脫靶量小,易于工程實(shí)現(xiàn)。
圖6 不同碰撞角彈道Fig.6 Trajectories of different collision angles
圖7 不同碰撞角對應(yīng)的零控脫靶量Fig.7 ZEM of different collision angles
圖8 不同碰撞角對應(yīng)的零控碰撞角誤差Fig.8 ZEA error of different collision angles
圖9 不同碰撞角對應(yīng)的導(dǎo)彈制導(dǎo)指令Fig.9 Missile′s guidance command of different collision angles
圖10 不同碰撞角對應(yīng)的目標(biāo)制導(dǎo)指令Fig.10 Target′s guidance command of different collision angles
圖11 攔截彈道對比Fig.11 Comparison of interception trajectories
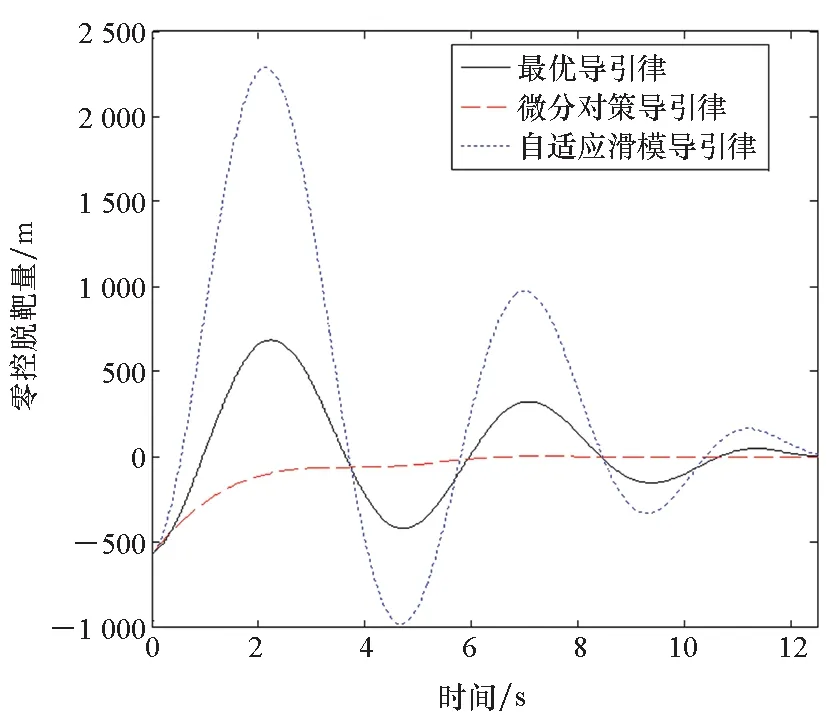
圖12 零控脫靶量對比Fig.12 Comparison of ZEM
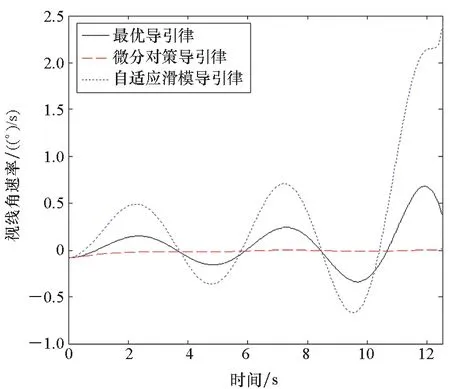
圖13 視線角速率對比Fig.13 Comparison of line of sight angular rate
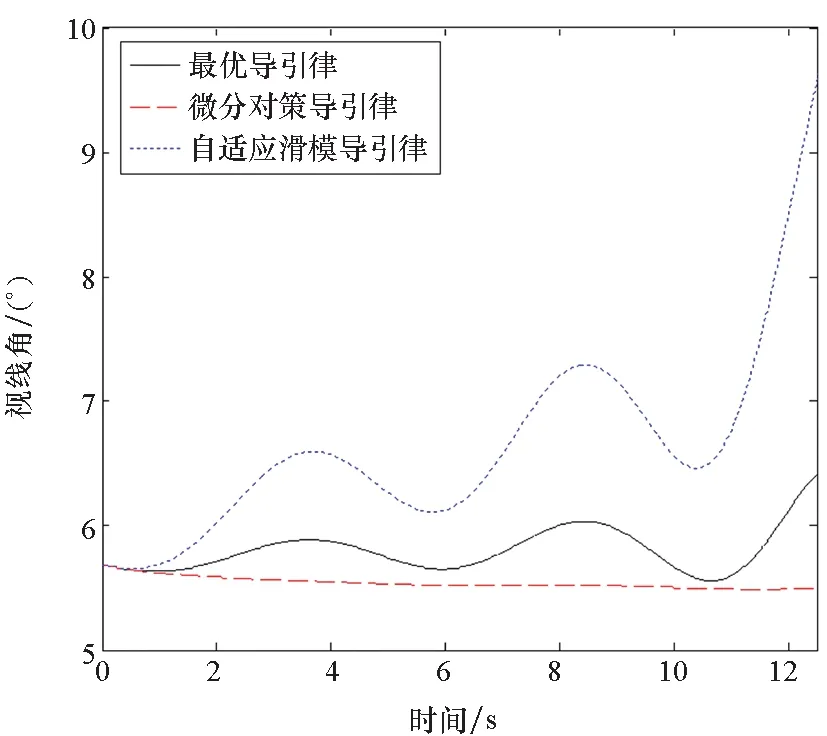
圖14 視線角對比Fig.14 Comparison of line of sight angle

圖15 導(dǎo)彈制導(dǎo)指令對比Fig.15 Comparison of missile′s guidance command
仿真結(jié)果表明,在三種導(dǎo)引律的攔截彈道中,自適應(yīng)滑模導(dǎo)引律的彈道波動幅度最大,并且其ZEM也隨目標(biāo)機(jī)動呈現(xiàn)較大的上下波動,這是因?yàn)榛?dǎo)引律的制導(dǎo)目的是使視線角速率趨于零。由于最優(yōu)導(dǎo)引律是在對目標(biāo)機(jī)動形式精確預(yù)估的前提下,直接將導(dǎo)彈導(dǎo)引至預(yù)測攔截點(diǎn),因此加速度指令在三種導(dǎo)引律中相對最小。微分對策導(dǎo)引律的優(yōu)勢在于對目標(biāo)機(jī)動不敏感,因此視線角速率及零控脫靶量曲線最為平緩,并且隨時間變化緩慢。
為了更充分地對比三種導(dǎo)引律的性能,根據(jù)導(dǎo)彈初始彈道傾角不同,選取三種攔截情形進(jìn)行對比分析。仿真初值如表1所示。
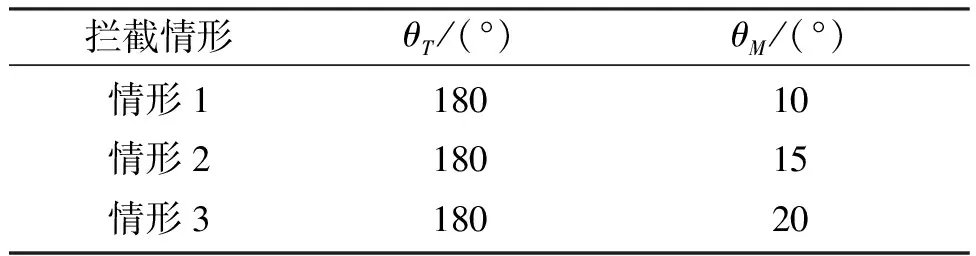
表1 三種攔截情形初值
三種攔截情形下的脫靶量統(tǒng)計如表2所示。
表2 仿真結(jié)果
通過對三種導(dǎo)引律進(jìn)行多次仿真對比,表明針對正弦機(jī)動目標(biāo)攔截,微分對策導(dǎo)引律的攔截末端脫靶量最小,制導(dǎo)精度最高。因?yàn)槠鋵δ繕?biāo)機(jī)動不敏感,視線角速度在末端能夠收斂到零,這表明其在高速機(jī)動目標(biāo)攔截場景中具有優(yōu)良的制導(dǎo)性能。
4 結(jié)論
本文研究了高速機(jī)動目標(biāo)攔截場景中的末制導(dǎo)段,通過簡化彈目運(yùn)動模型,基于微分對策理論推導(dǎo)出一種直/氣復(fù)合控制導(dǎo)彈攔截目標(biāo)的解析形式捕獲區(qū)表達(dá)式。此外,為了得到帶碰撞角度約束下的彈目最優(yōu)攔截策略解析解,通過選取適當(dāng)?shù)男阅苤笜?biāo),求解出兩人零和微分對策問題,分別得到復(fù)合控制導(dǎo)彈與目標(biāo)的最優(yōu)攔截策略。仿真分析了幾種情形下的捕獲區(qū)范圍,驗(yàn)證了捕獲區(qū)的存在條件,導(dǎo)引律仿真結(jié)果表明,本文所提出的微分對策導(dǎo)引律在高速機(jī)動目標(biāo)攔截場景中有優(yōu)良的制導(dǎo)性能,其具有較高的工程實(shí)用價值。
猜你喜歡
資源節(jié)約與環(huán)保(2022年8期)2022-09-20 02:25:50
建材發(fā)展導(dǎo)向(2022年5期)2022-04-18 08:11:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年11期)2021-12-06 05:38:46
建材發(fā)展導(dǎo)向(2021年13期)2021-07-28 07:14:48
河北農(nóng)機(jī)(2020年10期)2020-12-14 03:13:26
中華建設(shè)(2020年5期)2020-07-24 08:55:58
江蘇安全生產(chǎn)(2020年3期)2020-04-21 05:44:14
云南教育·中學(xué)教師(2019年6期)2019-08-13 07:03:28
基層中醫(yī)藥(2018年11期)2019-01-31 05:26:52
少兒科學(xué)周刊·少年版(2018年12期)2018-01-26 12:01:02
