試論“力臂概念”教學(xué)改進(jìn)的有效性
2021-06-06 08:45:19陳伊淳陳剛
中學(xué)物理·初中 2021年2期
關(guān)鍵詞:物理教學(xué)
陳伊淳 陳剛

摘 要:基于信息加工心理學(xué),從而分析力臂概念教學(xué)結(jié)論中獲得的邏輯機(jī)制包括排除因果關(guān)系的演繹法和求同的歸納法,并依據(jù)信息加工的要求,討論三個力臂概念改進(jìn)教學(xué)方案的合理性及其依據(jù).本文以“力臂概念”教學(xué)為例,試圖對教學(xué)結(jié)論的信息加工過程進(jìn)行微觀剖析,為有效教學(xué)提供穩(wěn)定一致的評價標(biāo)準(zhǔn)和合理的建議.
關(guān)鍵詞:力臂;物理教學(xué);信息加工心理學(xué);演繹;歸納
中圖分類號:G633.7 文獻(xiàn)標(biāo)識碼:B 文章編號:1008-4134(2021)04-0008-04
作者簡介:陳伊淳(1996-),女,廣東人,碩士研究生,研究方向:物理教學(xué);
陳剛(1968-),男,上海人,博士,副教授,研究方向:科學(xué)課程學(xué)習(xí)心理及教學(xué)理論.
力臂概念的引入是杠桿教學(xué)中的重難點(diǎn),正確認(rèn)識力臂、理解力臂的物理意義,是理解杠桿平衡規(guī)律的基礎(chǔ).在多個版本的初中物理教材中,大都直接通過文字給出力臂的定義,而忽略了力臂的物理意義.由于學(xué)生沒有經(jīng)歷力臂概念的建構(gòu)過程,而是被動接受力臂的定義,所以大部分學(xué)生對力臂概念的學(xué)習(xí)只能達(dá)到知其然而不知其所以然的效果.不少物理教師為突破力臂概念這一教學(xué)難點(diǎn),制作創(chuàng)新型的實(shí)驗(yàn)教具,進(jìn)行教學(xué)改進(jìn).
1 三種力臂引入的教學(xué)改進(jìn)方案
1.1 方案1:寬杠桿教具
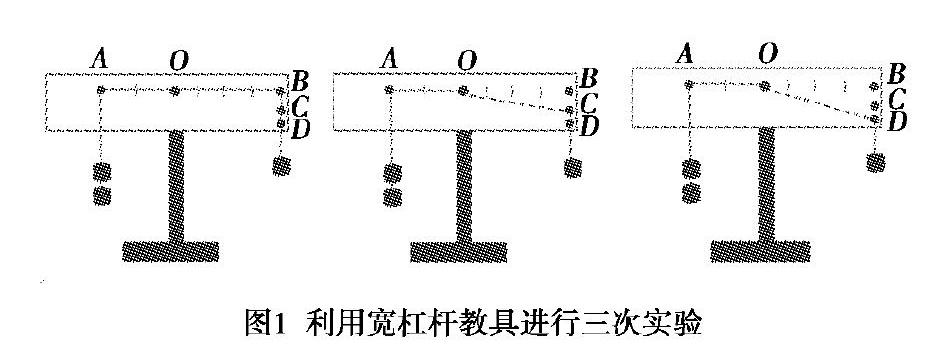
田成良等在“剖析力臂概念教學(xué)的邏輯”[1]一文中利用如圖1所示的寬杠桿裝置,進(jìn)行三次實(shí)驗(yàn).寬杠桿左側(cè)的力和距離保持不變,右側(cè)的拉力也保持不變,三次支點(diǎn)到作用點(diǎn)的距離不同,分別為OB、OC、OD,說明影響杠桿平衡的距離不是支點(diǎn)到力的作用點(diǎn)間的距離.教師進(jìn)而引導(dǎo)學(xué)生,三次實(shí)驗(yàn)雖然力的作用點(diǎn)不同,但是支點(diǎn)到右側(cè)力的作用線的距離OB是相等的,因此支點(diǎn)到力的作用線的距離,才是影響杠桿平衡的因素.
1.2 方案2:同心圓教具
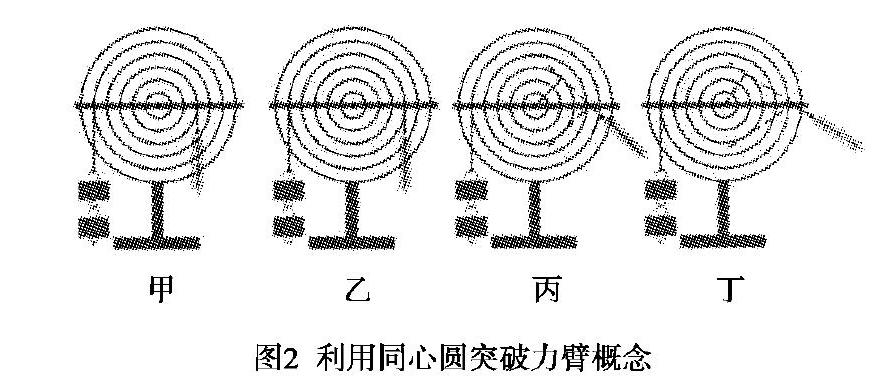
黃建林等在“應(yīng)用自制教具突破力臂概念教學(xué)難點(diǎn)”[2]一文中,采用如圖2所示的自制同心圓教具進(jìn)行教學(xué)設(shè)計.四次實(shí)驗(yàn)分別保持杠桿在水平位置平衡,左側(cè)鉤碼的數(shù)量和懸掛位置不改變,甲圖中,彈簧測力計為10N;乙圖中,彈簧測力計示數(shù)為7.5N;丙圖中,使彈簧測力計方向分別朝左下和右下,示數(shù)為10N;丁圖中,把彈簧測力計往右移,使彈簧測力計方向分別朝左下和右下,示數(shù)為10N.引導(dǎo)學(xué)生比較丙圖和丁圖,得到結(jié)論:圓心到力的作用線即該圓切線的距離都是該圓的半徑.
1.3 方案3:彎折杠桿教具
姜蘭等[3]在引入力臂的實(shí)驗(yàn)改進(jìn)中,利用如圖3所示的教具,兩根輕質(zhì)均勻的木板,能繞中心軸旋轉(zhuǎn),兩邊用夾子作調(diào)節(jié)配重碼,保持杠桿左端水平.通過甲圖和乙圖的實(shí)驗(yàn)發(fā)現(xiàn),盡管懸掛重物的位置變了,但力的作用線與原來在黑板上畫的作用線重合.引導(dǎo)學(xué)生分析盡管右側(cè)鉤碼在杠桿上的位置變化了(從A點(diǎn)到B點(diǎn)),但支點(diǎn)到力的作用線的距離沒變,由此順利地引入力臂的概念.
1.4 問題的提出
以上研究者都對力臂的引入作了教學(xué)和實(shí)驗(yàn)上的改進(jìn),認(rèn)為其教學(xué)方案能夠有效地促進(jìn)學(xué)生對力臂概念的理解和運(yùn)用.然而,只有厘清力臂概念建立過程獲得的結(jié)論、對應(yīng)的邏輯加工機(jī)制以及應(yīng)該呈現(xiàn)的必要信息,才能有據(jù)可依地評價教學(xué)方案的有效性,并給出相應(yīng)的教學(xué)建議.因此,下文將從信息加工心理學(xué)的角度,回答下述問題:
(1)上述教學(xué)改進(jìn)是否有效?有效性的依據(jù)是什么?
(2)上述教學(xué)方案是否仍有改進(jìn)之處?如何改進(jìn)?改進(jìn)的依據(jù)是什么?
2 基于信息加工心理學(xué)的學(xué)習(xí)機(jī)制
2.1 物理概念意義的習(xí)得機(jī)制
學(xué)習(xí)心理學(xué)揭示出學(xué)習(xí)的內(nèi)部機(jī)制,證明學(xué)生學(xué)習(xí)的過程實(shí)則是進(jìn)行信息加工的過程,符合學(xué)習(xí)機(jī)制的教學(xué)才是有效的教學(xué),這為教學(xué)指明了方向[4].
物理概念是客觀事物的物理共同屬性和本質(zhì)特征在人們頭腦中的反映,是物理事物的抽象 [5].學(xué)生學(xué)習(xí)物理概念的意義,就是通過運(yùn)用合理的信息加工方式對現(xiàn)象信息進(jìn)行邏輯加工,從而習(xí)得物理概念的本質(zhì)特征和概念間的因果聯(lián)系.
物理概念絕大多數(shù)是通過下定義的方式清晰界定,實(shí)際上也是通過與其他物理概念間的關(guān)系來界定的,主要關(guān)系有定性關(guān)系(如杠桿是否平衡與作用在杠桿上的力、力臂有關(guān))、定量關(guān)系(如杠桿平衡規(guī)律描述了動力、動力臂、阻力以及阻力臂之間的數(shù)量關(guān)系),在學(xué)習(xí)過程中,往往還要排除兩個對象間不存在因果聯(lián)系(如支點(diǎn)到力的作用點(diǎn)之間的距離與杠桿平衡沒有因果聯(lián)系).個體形成相關(guān)概念間聯(lián)系或排除因果聯(lián)系的方式是邏輯的.因此,學(xué)生習(xí)得物理概念意義,就是通過學(xué)生自己的思維活動形成這些概念間的本質(zhì)、因果聯(lián)系.
2.2 建立物理量間因果聯(lián)系的邏輯方法
探究因果聯(lián)系的歸納法主要有求同法、差異法、共變法、求同求異法等.求同法是通過考查被研究對象出現(xiàn)的若干場合,確定在各個場合先行情況中是否只有另外一個情況是共同的,如果是,那么這個共同情況與被研究的現(xiàn)象之間有因果聯(lián)系.其結(jié)構(gòu)見表1.
3 力臂概念的習(xí)得機(jī)制及教學(xué)合理性討論
3.1 方案1結(jié)論建立的邏輯過程
該教學(xué)方案中,加入拓展實(shí)驗(yàn),引發(fā)認(rèn)知沖突,本質(zhì)上是為了得到兩個教學(xué)結(jié)論.
結(jié)論1是杠桿平衡與支點(diǎn)到力的作用點(diǎn)的距離無關(guān);
結(jié)論2是杠桿平衡與支點(diǎn)到力的作用線的距離有關(guān).
結(jié)論1排除了點(diǎn)到點(diǎn)的距離與杠桿平衡的聯(lián)系,其學(xué)習(xí)機(jī)制應(yīng)遵循排除因果聯(lián)系的演繹推理.
通過三次實(shí)驗(yàn),獲得信息見表2.
由上述信息,獲得結(jié)論“杠桿平衡與支點(diǎn)到力的作用點(diǎn)的距離無關(guān)”.所用推理如下.
大前提:如果杠桿平衡與支點(diǎn)到力的作用點(diǎn)的距離有關(guān),則支點(diǎn)到力的作用點(diǎn)的距離變化,杠桿平衡狀態(tài)也變化.
小前提:支點(diǎn)到力的作用點(diǎn)的距離變化(分別為OB1、OB2、OB3),而杠桿仍能保持平衡.
結(jié)論:杠桿平衡與支點(diǎn)到力的作用點(diǎn)的距離無關(guān).
結(jié)論2通過求同法得到杠桿平衡與點(diǎn)到線的距離有關(guān)的結(jié)論,邏輯結(jié)構(gòu)見表3.
3.2 方案2結(jié)論建立的邏輯過程
該教學(xué)方案,實(shí)驗(yàn)裝置上增設(shè)若干個同心圓以輔助,以彈簧測力計取代一側(cè)的砝碼作為動力,實(shí)驗(yàn)過程中動力方向加以改變,獲得多組實(shí)驗(yàn)數(shù)據(jù).
獲得結(jié)論:杠桿平衡與支點(diǎn)到力的作用線的距離有關(guān).此結(jié)論通過求同法獲得,學(xué)生對圖2丙、丁的信息加工邏輯結(jié)構(gòu)見表4.
3.3 方案3結(jié)論建立的邏輯過程
該教學(xué)方案通過彎折杠桿,調(diào)節(jié)配重片,在保持杠桿平衡的條件下,引導(dǎo)學(xué)生觀察不變的物理對象.
結(jié)論1是杠桿平衡與支點(diǎn)到力的作用點(diǎn)的距離無關(guān);
結(jié)論2是杠桿平衡與支點(diǎn)到力的作用線的距離有關(guān).
結(jié)論1排除了點(diǎn)到點(diǎn)的距離與杠桿平衡的聯(lián)系,其學(xué)習(xí)機(jī)制應(yīng)遵循排除因果聯(lián)系的演繹推理.
通過圖3甲、乙兩次實(shí)驗(yàn),獲得信息見表5.
3.4 小結(jié)
由上面對力臂概念習(xí)得中排除因果聯(lián)系和定性關(guān)系的邏輯過程梳理,不難發(fā)現(xiàn)三個方案都遵循了求同法,嘗試引導(dǎo)學(xué)生識別杠桿平衡這個共同結(jié)果下的共同條件,即支點(diǎn)到力的作用線的距離不變,從而建立杠桿平衡與支點(diǎn)到力的作用線的距離有關(guān)的結(jié)論.和教材直接給出力臂的概念相比,學(xué)生通過內(nèi)部的邏輯加工機(jī)制,建立起杠桿平衡和支點(diǎn)到力的作用線的距離之間的聯(lián)系,從而擺脫概念的機(jī)械記憶,習(xí)得力臂概念的物理意義.這三個教學(xué)方案獲得結(jié)論的過程,基本符合邏輯加工的過程,因此所做出的改進(jìn),是比較合理的.
4 教學(xué)建議
4.1 信息加工機(jī)制對教學(xué)設(shè)計的要求
根據(jù)信息加工機(jī)制,有效的教學(xué)設(shè)計應(yīng)滿足如下要求.
容量限制要求:教學(xué)中提供給學(xué)生、獲得結(jié)論所需的信息,應(yīng)保持在適度范圍,減少干擾信息.
序列加工要求:教學(xué)中提供信息的方式應(yīng)滿足呈現(xiàn)一次加工所需的信息,獲得一個新的結(jié)論.
信息加工方式要求:教學(xué)中信息呈現(xiàn)應(yīng)符合特定結(jié)論獲得的加工方式.
要實(shí)現(xiàn)上述目標(biāo),教師應(yīng)分析教學(xué)結(jié)論的內(nèi)容及數(shù)量,并通過追蹤每一教學(xué)結(jié)論獲得的信息流程,確定新結(jié)論建立的必要信息及加工方式,由此對教學(xué)活動做出合理安排.
4.2 方案1教學(xué)建議
獲得結(jié)論1和結(jié)論2所需的信息應(yīng)遵循序列加工要求.先呈現(xiàn)表1的信息(支點(diǎn)到力的作用點(diǎn)距離分別為OB1、OB2、OB3,杠桿保持平衡),獲得杠桿平衡與支點(diǎn)到力的作用點(diǎn)的距離無關(guān)的結(jié)論;再呈現(xiàn)表2的信息(力的作用點(diǎn)改變的情況下,支點(diǎn)到力的作用線的距離均為OB2,杠桿保持平衡),獲得杠桿平衡與支點(diǎn)到力的作用線的距離有關(guān)的結(jié)論.
以更清晰的方式呈現(xiàn)求同法的共同條件.獲得結(jié)論2 的過程中,教師應(yīng)引導(dǎo)學(xué)生關(guān)注到信息加工所需的信息,在杠桿保持平衡的條件下,支點(diǎn)到力的作用線的距離均為OB2,在識別必要信息后,學(xué)生才能啟動邏輯加工,通過求同法獲得結(jié)論.因此,教師可以適當(dāng)?shù)卦诤诎迳嫌锰摼€畫出線段OB2,幫助學(xué)生識別這一必要信息.
4.3 方案2教學(xué)建議
根據(jù)圖2甲、丙、丁呈現(xiàn)的信息,增設(shè)排除因果聯(lián)系獲得結(jié)論環(huán)節(jié).比較圖2甲、丙、丁,發(fā)現(xiàn)在杠桿平衡的共同結(jié)果下,彈簧測力計示數(shù)均為10N,但支點(diǎn)到右側(cè)力的作用點(diǎn)的距離不同,可通過排除因果聯(lián)系的演繹法獲得“杠桿平衡與支點(diǎn)到力的作用點(diǎn)的距離無關(guān)”的結(jié)論,推理形式如下.
大前提:如果杠桿平衡與支點(diǎn)到力的作用點(diǎn)的距離有關(guān),則支點(diǎn)到力的作用點(diǎn)的距離變化,杠桿平衡狀態(tài)也變化.
小前提:支點(diǎn)到力的作用點(diǎn)的距離變化(分別為3、4、5個單位長度),而杠桿仍能保持平衡.
結(jié)論:杠桿平衡與支點(diǎn)到力的作用點(diǎn)的距離無關(guān).
排除了杠桿平衡與支點(diǎn)到力的作用點(diǎn)距離的關(guān)系之后,再通過求同法由圖2丙、丁建立定性關(guān)系,符合序列加工的要求,教學(xué)更為合理.
4.4 方案3教學(xué)建議
遵循容量限制,減少干擾信息.盡管方案3將力的作用線畫在黑板上,有助于學(xué)生直觀地識別必要信息,即圖3中力的作用線并沒有改變,從而對共同條件和共同結(jié)果進(jìn)行加工,獲得結(jié)論.由于杠桿有自重,該方案在每次右側(cè)杠桿角度改變之后,都需要調(diào)節(jié)配重片,使得杠桿左側(cè)在水平方向平衡.加上配重片,該杠桿共受四個力的作用,也就有四個力臂,配重片的位置會給學(xué)生帶來干擾,阻礙學(xué)生識別有效信息,即支點(diǎn)到右側(cè)鉤碼的力的作用線的距離.因此教師應(yīng)說明配重片的作用,并在調(diào)節(jié)配重片后,向?qū)W生強(qiáng)調(diào)彎折杠桿左側(cè)的水平狀態(tài),再掛上鉤碼,引導(dǎo)學(xué)生識別支點(diǎn)到右側(cè)鉤碼力的作用線的距離.
5 結(jié)語
學(xué)習(xí)是信息加工的過程,教學(xué)只有滿足信息加工機(jī)制要求,才能達(dá)到教學(xué)目標(biāo).本文基于信息加工心理學(xué)理論,討論了力臂引入教學(xué)的幾個方案的合理性以及改進(jìn)建議.由上述討論可見,對教學(xué)結(jié)論的信息加工過程進(jìn)行微觀剖析,給教師提供了一種有據(jù)可依的分析方式,使得教師能夠?qū)W(xué)生習(xí)得結(jié)論所需的信息和信息呈現(xiàn)方式等進(jìn)行合理的設(shè)計,進(jìn)而安排相關(guān)的教學(xué)活動事件.因此,將教學(xué)建立在可靠的學(xué)習(xí)理論基礎(chǔ)上,可以為有效教學(xué)提供穩(wěn)定一致的評價標(biāo)準(zhǔn)和合理的建議.
參考文獻(xiàn):
[1]田成良,孔令坤,趙瑞雪.剖析力臂概念教學(xué)的邏輯[J].中學(xué)物理(初中版),2019,37(06):5-6.
[2]黃建林,朱春鳳,王華震.應(yīng)用自制教具突破力臂概念教學(xué)難點(diǎn)[J].物理教師,2017,38(04):45-47.
[3]姜蘭,孫偉.平面鏡成像實(shí)驗(yàn)和引入力臂實(shí)驗(yàn)的改進(jìn)[J].物理實(shí)驗(yàn),2013,33(06):14-15.
[4]陳剛.論物理概念和規(guī)律意義學(xué)習(xí)的教學(xué)設(shè)計——學(xué)習(xí)心理學(xué)的視角[J].全球教育展望,2014,43(12):58-71.
[5]陳剛.新編物理教學(xué)論[M].上海:華東師范大學(xué)出版社,2006.
(收稿日期:2020-11-17)
猜你喜歡
讀與寫·上旬刊(2016年10期)2016-11-25 17:02:02
讀與寫·上旬刊(2016年10期)2016-11-25 16:55:54
儷人·教師版(2016年14期)2016-11-22 21:41:44
儷人·教師版(2016年15期)2016-11-22 02:42:58
儷人·教師版(2016年14期)2016-11-22 00:44:14
新一代(2016年15期)2016-11-16 16:19:59
科技資訊(2016年19期)2016-11-15 10:14:47
情感讀本·理論篇(2016年9期)2016-11-05 17:35:51
課程教育研究·學(xué)法教法研究(2016年21期)2016-10-20 19:09:39
科技視界(2016年21期)2016-10-17 19:14:43
