ONR內(nèi)傾船波浪中復(fù)原力臂非線性現(xiàn)象試驗(yàn)和數(shù)值研究
2021-06-03 08:18:04卜淑霞張進(jìn)豐黃苗苗
船舶力學(xué) 2021年5期
卜淑霞,張進(jìn)豐,黃苗苗,魯 江,顧 民
(中國(guó)船舶科學(xué)研究中心水動(dòng)力學(xué)重點(diǎn)實(shí)驗(yàn)室,江蘇無(wú)錫214082)
0 引 言
國(guó)際海事組織(IMO)正在制定船舶第二代完整穩(wěn)性衡準(zhǔn),包括參數(shù)橫搖和純穩(wěn)性喪失薄弱性衡準(zhǔn)和穩(wěn)性直接評(píng)估[1]。對(duì)于水線面附近幾何外形變化較大的船舶,當(dāng)船中位于波峰時(shí),復(fù)原力臂會(huì)比靜水復(fù)原力臂小;當(dāng)船中位于波谷時(shí),復(fù)原力臂會(huì)比靜水復(fù)原力臂大,如果波長(zhǎng)近似船長(zhǎng)會(huì)引起波浪復(fù)原力臂的周期性變化,而這種周期性變化是參數(shù)橫搖失效模式發(fā)生的主要原因[2];如果波峰位于船舯的時(shí)間過(guò)長(zhǎng),會(huì)導(dǎo)致船舶穩(wěn)性力臂減少,是純穩(wěn)性喪失失效模式發(fā)生的主要原因[3]。因此,參數(shù)橫搖和純穩(wěn)性喪失失效模式的發(fā)生都與波浪中復(fù)原力臂的變化有關(guān),故橫搖復(fù)原力的變化是影響參數(shù)橫搖衡準(zhǔn)和純穩(wěn)性喪失衡準(zhǔn)評(píng)估的關(guān)鍵因素,有必要開(kāi)展試驗(yàn)和數(shù)值計(jì)算的研究,驗(yàn)證目前橫搖復(fù)原力計(jì)算方法的可靠性,并在穩(wěn)性直接評(píng)估中提出合適的計(jì)算橫搖復(fù)原力的方法。
在進(jìn)行本文的研究時(shí)借鑒了國(guó)際上針對(duì)波浪復(fù)原力臂的研究方法[5],將所有作用在橫搖方向的力矩都轉(zhuǎn)換為波浪中的橫搖復(fù)原力臂,在此基礎(chǔ)上,對(duì)比分析不同成分作用力對(duì)波浪中復(fù)原力臂變化的影響,因此,文中所述的橫搖復(fù)原力臂與常規(guī)耐波性中剛性復(fù)原力臂有所不同。此時(shí)波浪中復(fù)原力臂變化主要包括兩部分:由常規(guī)Froude-Krylov 力和靜水力引起的成分;由輻射力和繞射力引起的成分。目前波浪穩(wěn)性的研究中,F(xiàn)roude-Krylov力和靜水力引起的成分均采用了瞬時(shí)濕表面,即考慮了非線性特征。早期的研究表明(Paulling,1961)[4],基于Froude-Krylov 力假設(shè)可以較好地預(yù)報(bào)波浪中的復(fù)原力臂,因此早期大部分研究中忽略了輻射力和繞射力引起的復(fù)原力臂的變化。
但Umeda 和Hashimoto(2005)[5]的研究表明,考慮動(dòng)態(tài)輻射力和繞射力之后可以提高參數(shù)橫搖的預(yù)報(bào)精度,該研究認(rèn)為動(dòng)態(tài)輻射力和繞射力的影響與橫傾角度成線性關(guān)系,且認(rèn)為與波高成線性關(guān)系。其他學(xué)者也采用線性關(guān)系開(kāi)展了研究[6-9]。本文作者基于二維切片法,也研究了動(dòng)態(tài)輻射力和繞射力對(duì)參數(shù)橫搖預(yù)報(bào)精度的影響,考慮了動(dòng)態(tài)復(fù)原力臂與橫傾角度的非線性關(guān)系,采用了插值方法計(jì)算瞬時(shí)橫傾角度下的動(dòng)態(tài)輻射力和繞射力,但對(duì)于垂蕩和縱搖則采用了頻域轉(zhuǎn)時(shí)域的線性方法[10];隨后,針對(duì)頂浪和隨浪中復(fù)原力臂的變化開(kāi)展了詳細(xì)的模型試驗(yàn)研究,并對(duì)比分析了準(zhǔn)靜態(tài)平衡法和切片法的區(qū)別[11]。Sadat-Hosseini 等[12]采用CFDSHIP-IOWA 全粘流方法研究了參數(shù)橫搖現(xiàn)象,文中對(duì)波浪中復(fù)原力臂的變化進(jìn)行了數(shù)值模擬。結(jié)果表明,復(fù)原力臂變化的非線性現(xiàn)象比較明顯,不過(guò)文中未能研究非線性出現(xiàn)的原因。
為了提供更加可靠的預(yù)報(bào)方法以及考慮到二維切片法在處理垂蕩和縱搖運(yùn)動(dòng)的局限性[13],本文作者(2019)進(jìn)一步基于三維時(shí)域混合源法,建立了波浪中復(fù)原力臂的計(jì)算方法,并在速度勢(shì)的求解中引入精確物面條件,首次在波浪穩(wěn)性的計(jì)算中考慮物面全非線性,實(shí)現(xiàn)了沿瞬時(shí)濕表面積分的輻射力和繞射力的計(jì)算。針對(duì)外飄船型,詳細(xì)研究了復(fù)原力臂的不同組成成分,并對(duì)比分析了已有的近似物面非線性方法和精確物面方法的區(qū)別,指出了目前橫搖復(fù)原力臂計(jì)算方法的不足,尤其是高航速、高波陡的情況[14]。
基于前期的研究結(jié)論,本文進(jìn)一步采用三維時(shí)域混合源法,針對(duì)ONR 內(nèi)傾船型的橫搖復(fù)原力臂開(kāi)展了研究,重點(diǎn)分析了ONR內(nèi)傾船型波浪中橫搖復(fù)原力臂非線性現(xiàn)象的原因。
1 計(jì)算方法與理論模型
1.1 三維時(shí)域混合源法
船舶波浪穩(wěn)性的研究屬于瞬態(tài)的非線性問(wèn)題,且?guī)缀蔚姆蔷€性特征也是非常重要的影響因素,因此研究中采用三維時(shí)域面元法求解。在面元法的具體處理中又可進(jìn)一步劃分為Rankine 源和時(shí)域Green 函數(shù)兩種方法,考慮到Rankine 源方法中不容易處理遠(yuǎn)場(chǎng)邊界和時(shí)域Green 函數(shù)高頻振蕩等問(wèn)題,本文采用了三維時(shí)域混合源法求解船舶在波浪中的非線性時(shí)域運(yùn)動(dòng)。該方法綜合了Rankine源能較好地反應(yīng)近壁面大幅運(yùn)動(dòng)以及時(shí)域Green 函數(shù)自動(dòng)滿足線性自由面和遠(yuǎn)場(chǎng)輻射條件的優(yōu)點(diǎn)[15-16]。該三維時(shí)域混合源法在數(shù)值求解中引入了控制面SC,將流場(chǎng)分為內(nèi)場(chǎng)I 和外場(chǎng)II。內(nèi)場(chǎng)I 是由船體濕表面Sb、部分自由液面Sf1和控制面SC包圍的閉合區(qū)域;外場(chǎng)II 由控制面SC、剩余的自由液面Sf2和無(wú)窮邊界S∞組成,流場(chǎng)分布如圖1所示。
為了研究波浪中船舶的運(yùn)動(dòng),采用了三個(gè)坐標(biāo)系:(1)大地坐標(biāo)系OXYZ:Z 軸垂直向上,X-Y 平面位于靜水面,X 軸在中心面,指向船首,原點(diǎn)位于中心線,OXYZ 坐標(biāo)系用于定義入射波,該坐標(biāo)系不隨船體運(yùn)動(dòng);(2)慣性坐標(biāo)系o′x′y′z′:初始時(shí)刻與OXYZ處于同一位置,但隨船體以速度U0前進(jìn),原點(diǎn)位于靜水面上并與重心在同一鉛垂線上;(3)船體系Gxyz:隨船體運(yùn)動(dòng),初始時(shí)刻x - y 平行于船體靜水面,坐標(biāo)原點(diǎn)位于重心G 處。通過(guò)3 個(gè)平動(dòng)和3 個(gè)轉(zhuǎn)動(dòng)來(lái)唯一確定船體的運(yùn)動(dòng),也就是縱蕩、橫蕩、垂蕩,橫搖、縱搖和艏搖。
記內(nèi)場(chǎng)總擾動(dòng)勢(shì)Φ(P,t)為ΦI(P,t),那么ΦI(P,t)在大地坐標(biāo)系下應(yīng)該滿足以下條件:

圖1 混合源法流場(chǎng)區(qū)域劃分和坐標(biāo)系示意圖Fig.1 Diagram of the fluid region and coordinate systems in the hybrid source method
則內(nèi)場(chǎng)I中Rankine源的邊界積分方程如下:
式中,Aij、Bij為影響系數(shù),可以表示為

記外場(chǎng)總擾動(dòng)勢(shì)Φ(P,t)為ΦII(P,t),那么ΦII(P,t)在大地坐標(biāo)系下應(yīng)滿足以下條件:
外場(chǎng)II 采用時(shí)域Green 函數(shù),時(shí)域Green 函數(shù)自動(dòng)滿足線性自由面和遠(yuǎn)場(chǎng)輻射條件。因此,只需要在控制面布置面源即可,采用邊界元,外場(chǎng)邊界積分方程可以離散為

式中,Cij、Dij為矩陣系數(shù),可以寫成

引入的虛擬控制面隨船體一起運(yùn)動(dòng),并且在控制面上內(nèi)外流場(chǎng)的速度勢(shì)和速度勢(shì)導(dǎo)數(shù)連續(xù),求解內(nèi)場(chǎng)、外場(chǎng)、控制面上組成離散方程,可以獲得當(dāng)前時(shí)刻船體濕表面積Sb上的速度勢(shì)ΦI,自由表面Sf1上的速度勢(shì)導(dǎo)數(shù)?ΦI/?n,以及控制面SC上的速度勢(shì)ΦI和速度勢(shì)導(dǎo)數(shù)?ΦI/?n。然后利用物面上的速度勢(shì)ΦI,通過(guò)Bernoulli’s 方程得到船體表面的壓力,利用內(nèi)場(chǎng)I 中的自由面獲得下一時(shí)刻整個(gè)流場(chǎng)的擾動(dòng)勢(shì)和下一時(shí)刻內(nèi)場(chǎng)的速度勢(shì)ΦI。
對(duì)船體平均濕表面積Sb上的源強(qiáng)積分即可得到船體濕表面上的擾動(dòng)速度勢(shì)ΦI,且已知入射波速度勢(shì)Φw,最后通過(guò)Bernoulli’s方程可得到相應(yīng)的壓強(qiáng)項(xiàng):

式中:?Φw/?t為入射波的速度勢(shì)導(dǎo)數(shù),在線性波浪理論中是顯性已知的;?ΦI/?t為內(nèi)場(chǎng)擾動(dòng)勢(shì)的速度勢(shì)導(dǎo)數(shù)。
求得每個(gè)面元控制點(diǎn)的壓力后,對(duì)每個(gè)面元積分即可求得作用于該面元上的流體作用力F 和力矩M。

1.2 理論模型
一般剛體運(yùn)動(dòng)具有六個(gè)自由度,但可以通過(guò)考慮一些限制條件,將其減少。首先,假設(shè)船舶在頂浪航行時(shí)航向固定,此時(shí)橫蕩和艏搖運(yùn)動(dòng)可以忽略;其次,假設(shè)船體可以保持恒定的航速,此時(shí)縱蕩運(yùn)動(dòng)可以忽略,這時(shí)僅剩下垂蕩、縱搖和橫搖運(yùn)動(dòng)。又進(jìn)一步考慮到頂浪航行時(shí)垂蕩和縱搖與橫搖運(yùn)動(dòng)存在強(qiáng)耦合作用,頂浪中復(fù)原力臂的變化與動(dòng)態(tài)垂蕩和縱搖運(yùn)動(dòng)有關(guān)[11,17-18],因此本文選取垂蕩-橫搖-縱搖相互耦合的三自由度數(shù)學(xué)模型。

式中:m 是船體質(zhì)量;Ixx是船體橫搖慣性矩;Iyy是船體縱搖慣性矩;Aij是船體附加質(zhì)量;Bij是船體阻尼系數(shù);ζ 是船體垂蕩位移;θ 是船體縱搖運(yùn)動(dòng);φ 是船體橫搖運(yùn)動(dòng);N1、N3分別是線性和立方項(xiàng)的橫搖阻尼,由于橫搖角度固定,故在橫搖復(fù)原力臂的計(jì)算中對(duì)結(jié)果無(wú)影響;FFK+H是Froude-Krylov 力和靜水力;FD是船體繞射力。船體運(yùn)動(dòng)的偏微分方程利用Runge-Kutta方法求解。
動(dòng)穩(wěn)性研究的關(guān)鍵在于橫搖力矩求解的準(zhǔn)確性。因此,可以通過(guò)評(píng)估不同成分在橫搖力矩方向的貢獻(xiàn)進(jìn)而研究不同成分作用力的影響,為了方便計(jì)算,在研究中將所有作用在橫搖方向的力/力矩轉(zhuǎn)換為橫搖方向的復(fù)原力臂。此時(shí)波浪中復(fù)原力臂可以進(jìn)一步劃分成兩部分,一部分是靜水和Froude-Krylov力引起的成分(GZFK),另一部分是輻射力和繞射力引起的成分(GZRD),可表示為

上述公式中,靜水力和Froude-Krylov力的計(jì)算一般沿入射波與船體形成的瞬時(shí)濕表面積分,輻射力和繞射力的計(jì)算與物面條件有關(guān)[20],一般可以劃分為:僅考慮初始平均濕表面的線性物面邊界條件,此時(shí)輻射力和繞射力的計(jì)算沿著初始時(shí)刻的平均濕表面積分,故輻射力和繞射力在計(jì)算中保持不變;考慮瞬時(shí)平均濕表面的近似物面非線性條件,此時(shí)輻射力和繞射力的計(jì)算沿著每一時(shí)刻的平均濕表面積分;考慮船舶-波浪瞬時(shí)位置的精確物面條件,此時(shí)輻射力和繞射力的計(jì)算沿船舶-波浪瞬時(shí)相對(duì)位置形成的濕表面積分。
本文研究中采用了三種方法研究橫搖復(fù)原力臂的變化:一種是僅考慮Froude-Krylov 力和靜水力引起的橫搖復(fù)原力臂的變化,稱為GZFK。該方法中沿船舶-波浪形成的瞬時(shí)濕表面積分壓力計(jì)算Froude-Krylov力和靜水力,進(jìn)而獲得對(duì)應(yīng)的橫搖復(fù)原力臂:

第二種方法是在第一種方法的基礎(chǔ)上,同時(shí)考慮Froude-Krylov 力、靜水力、輻射力和繞射力引起的橫搖復(fù)原力臂的變化,稱為GZFK+RD,其中采用近似物面非線性條件處理輻射力和繞射力引起的復(fù)原力臂成分,也即在Laplace 初邊值問(wèn)題的求解中采用近似物面條件,進(jìn)而得到輻射力和繞射力引起的復(fù)原力臂,示意圖如圖2所示。

第三種方法仍然是同時(shí)考慮Froude-Krylov力、靜水力、輻射力和繞射力引起的橫搖復(fù)原力臂的變化,但基于精確物面條件處理輻射力和繞射力引起的復(fù)原力臂成分,也就是每一時(shí)刻都對(duì)船體表面網(wǎng)格、自由面網(wǎng)格、控制面網(wǎng)格進(jìn)行瞬時(shí)劃分,瞬時(shí)求解Laplace 初邊值問(wèn)題,進(jìn)而得到輻射力和繞射力引起的復(fù)原力臂,示意圖如圖3所示。

式中,S代表船體瞬時(shí)濕表面,Sˉ(φ)代表考慮橫傾角度之后的平均濕表面,φ代表固定橫傾角度。

圖2 近似物面非線性條件示意圖Fig.2 Diagram of the nonlinear body condition

圖3 精確物面條件示意圖Fig.3 Diagram of the exact body condition
2 模型試驗(yàn)與數(shù)值模型
2.1 模型試驗(yàn)
研究對(duì)象為ONR 內(nèi)傾船型,該船的主要參數(shù)如表1所示,船體外形和剖面圖如圖4所示。可以看出該船內(nèi)傾比較明顯,當(dāng)波峰或者波谷位于船舯時(shí),復(fù)原力臂會(huì)與靜水中有所不同,在縱浪中航行時(shí)橫搖復(fù)原力臂的變化可能會(huì)非常顯著,導(dǎo)致容易發(fā)生穩(wěn)性不足的現(xiàn)象。因此,保證波浪中足夠的穩(wěn)性是該船型走向?qū)嶋H應(yīng)用必須要解決的問(wèn)題。

表1 ONR內(nèi)傾船型主尺度及主要參數(shù)(縮尺比:1:40.526)Tab.1 Principal particulars of the ONR tumblehome(Scale:1:40.526)

圖4 ONR內(nèi)傾船型模型試驗(yàn)照片和船體剖面圖Fig.4 Model test photo and profile of ONR tumblehome
模型試驗(yàn)研究在中國(guó)船舶科學(xué)研究中心耐波性水池中進(jìn)行,該水池主尺度為長(zhǎng)69 m、寬46 m、深4 m,水池相鄰兩邊安裝了先進(jìn)的由伺服電機(jī)驅(qū)動(dòng)的三維造波系統(tǒng),可進(jìn)行任意浪向下的模型試驗(yàn)。配置了先進(jìn)的浪高儀以及自主研發(fā)的波浪力/力矩和運(yùn)動(dòng)響應(yīng)集成測(cè)量裝置,可以測(cè)量不同橫傾角度下船模在波浪中橫傾力臂的變化,滿足試驗(yàn)要求。
船模采用玻璃鋼(FRP)材料,船體采用整體構(gòu)造,有足夠的縱、橫強(qiáng)度,保證在波浪中試驗(yàn)時(shí)模型不發(fā)生變形。為了保證在大傾角下船模內(nèi)部不發(fā)生進(jìn)水,模型整體采用水密構(gòu)造,設(shè)置了三個(gè)艙蓋,同時(shí)艙蓋采用有機(jī)玻璃且采用密封圈以及可拆卸螺絲固定。
試驗(yàn)采用約束模方式,將模型固定在要求的橫傾角度下,垂蕩和縱搖自由,約束其它模態(tài);采用中國(guó)船舶科學(xué)研究中心自主研發(fā)的波浪力/力矩和運(yùn)動(dòng)響應(yīng)集成測(cè)量裝置測(cè)量波浪中船模橫搖復(fù)原力的變化和垂蕩、縱搖運(yùn)動(dòng);將一臺(tái)伺服式浪高儀安裝在船模重心右側(cè)約1.5 m處,由計(jì)算機(jī)實(shí)時(shí)記錄船模重心與波浪的瞬時(shí)相對(duì)位置。
2.2 數(shù)值模擬
數(shù)值模擬中,ONR 內(nèi)傾船型整船體和水面以下船體網(wǎng)格劃分如圖5 所示。計(jì)算中采用線性面元網(wǎng)格,邊界域的大小由控制面大小決定,控制面的尺寸考慮船體可能產(chǎn)生的興波和波系角,采用式(18)計(jì)算,控制面的深度為4.5d,滿足無(wú)限水深條件。

式中,Ld是控制面長(zhǎng)度;Bd是控制面寬度;λ是波長(zhǎng),λ= U2· 2π/g。

圖5 計(jì)算用的船體表面和自由面網(wǎng)格Fig.5 Meshes on the body and free surface used for calculation
數(shù)值模擬中船舯剖面位于內(nèi)場(chǎng)的中心位置,數(shù)值模擬中至少得到10 個(gè)穩(wěn)定的橫搖周期,時(shí)間間隔為0.15 s,保證每個(gè)周期的模擬點(diǎn)在100個(gè)左右。
3 結(jié)果與分析
3.1 試驗(yàn)和計(jì)算結(jié)果對(duì)比
基于三維時(shí)域混合源法開(kāi)展不同工況下波浪中復(fù)原力臂變化的計(jì)算研究。作者前期研究表明[13],在計(jì)算輻射力和繞射力時(shí),采用精確物面條件與采用近似物面非線性條件計(jì)算得到的復(fù)原力臂幅值基本一致,精確物面可以更好地捕捉非線性現(xiàn)象,但采用精確物面條件計(jì)算,需要瞬時(shí)劃分所有的網(wǎng)格,瞬時(shí)求解Laplace 初邊值問(wèn)題進(jìn)而得到瞬時(shí)擾動(dòng)速度勢(shì),計(jì)算時(shí)間過(guò)長(zhǎng)。因此,從節(jié)省計(jì)算時(shí)間的角度出發(fā),本文首先采用了近似物面非線性條件進(jìn)行了復(fù)原力臂的計(jì)算,然后在分析非線性原因時(shí),同時(shí)采用了兩種物面條件。計(jì)算結(jié)果中,“Exp”代表模型試驗(yàn)結(jié)果;“GZFK”代表僅考慮Froude-Krylov(FK)力和靜水力對(duì)復(fù)原力臂的貢獻(xiàn);“GZFK+RD”代表同時(shí)考慮FK 力、靜水力以及輻射力和繞射力(R&D)對(duì)復(fù)原力臂的貢獻(xiàn);復(fù)原力臂代表橫搖復(fù)原力臂;FK 力、靜水力、輻射力和繞射力代表橫搖方向的力矩。
首先,選取工況λ/Lpp= 0.8、H/λ= 0.03、Fr = 0.0、φ = 8°,時(shí)歷曲線對(duì)比結(jié)果如圖6(a)所示。此種工況為零航速工況,從對(duì)比結(jié)果可以看出,基于Froude-Krylov力假設(shè)的復(fù)原力臂計(jì)算結(jié)果與模型試驗(yàn)結(jié)果吻合較好,進(jìn)一步考慮輻射力和繞射力對(duì)復(fù)原力臂的影響后,計(jì)算結(jié)果比模型試驗(yàn)結(jié)果稍微偏大,但整體上仍與模型試驗(yàn)結(jié)果吻合較好,主要是因?yàn)榱愫剿傧聞?dòng)態(tài)輻射力和繞射力引起的復(fù)原力成分所占的比例較小[14,19]。
針對(duì)工況λ/Lpp= 0.8、H/λ= 0.04、Fr = 0.0、φ = 8°,時(shí)歷曲線對(duì)比結(jié)果如圖6(b)所示。此種情況下將波陡增加到了0.04,從模型試驗(yàn)結(jié)果可以看出,非線性現(xiàn)象略有增加,模型試驗(yàn)中高頻成分比較明顯,這些高頻信號(hào)一方面可能是由試驗(yàn)設(shè)備與水池中大橋共振引起的,一方面也可能是由復(fù)原力臂本身的非線性引起的,本文重點(diǎn)分析復(fù)原力臂本身的非線性成分。從對(duì)比結(jié)果可以看出:基于Froude-Krylov 力假設(shè)的復(fù)原力臂計(jì)算結(jié)果與模型試驗(yàn)主要幅值部分吻合較好;進(jìn)一步考慮動(dòng)態(tài)輻射力和繞射力影響后的GZFK+RD,幅值可以覆蓋到高頻信號(hào)部分。

圖6 計(jì)算結(jié)果與模型試驗(yàn)結(jié)果對(duì)比(λ/Lpp=0.8,F(xiàn)r=0.0,φ=8°)Fig.6 Comparison of the calculation results with experimental results(λ/Lpp=0.8,Fr=0.0,φ=8°)
進(jìn)一步選取有航速的工況λ/Lpp= 0.8、H/λ= 0.03、Fr = 0.1、φ = 8°,對(duì)比結(jié)果如圖7 所示,此種工況下航速增加到了Fr = 0.1。可以看出,隨著航速的增加,復(fù)原力臂曲線越來(lái)越不符合簡(jiǎn)諧規(guī)律,模型試驗(yàn)中多頻率疊加現(xiàn)象變得更加明顯,也就是說(shuō),增加航速會(huì)增加復(fù)原力臂的非線性現(xiàn)象,這種非線性現(xiàn)象使得高航速下GZ 的預(yù)報(bào)十分復(fù)雜。從時(shí)歷曲線可以看出,僅考慮FK 力的計(jì)算結(jié)果比模型試驗(yàn)結(jié)果偏小;同時(shí)考慮FK 力和R&D 之后的結(jié)果與模型試驗(yàn)吻合良好,可以間接地推斷出GZRD的作用在不斷增加,也可以證明基于Froude-Krylov 力假設(shè)不足以精確預(yù)報(bào)GZ,高航速下復(fù)原力臂多頻率疊加現(xiàn)象主要是GZRD的影響。進(jìn)一步分析FFT曲線可以看出,模型試驗(yàn)中包括多種頻率成分,第一共振成分比較顯著,這也是常規(guī)線性方法可以預(yù)報(bào)的頻率成分;僅考慮FK 力的計(jì)算結(jié)果比模型試驗(yàn)結(jié)果偏小;同時(shí)考慮FK 力和R&D 之后,計(jì)算得到的第一共振成分和第二共振成分的結(jié)果均與模型試驗(yàn)結(jié)果吻合良好。
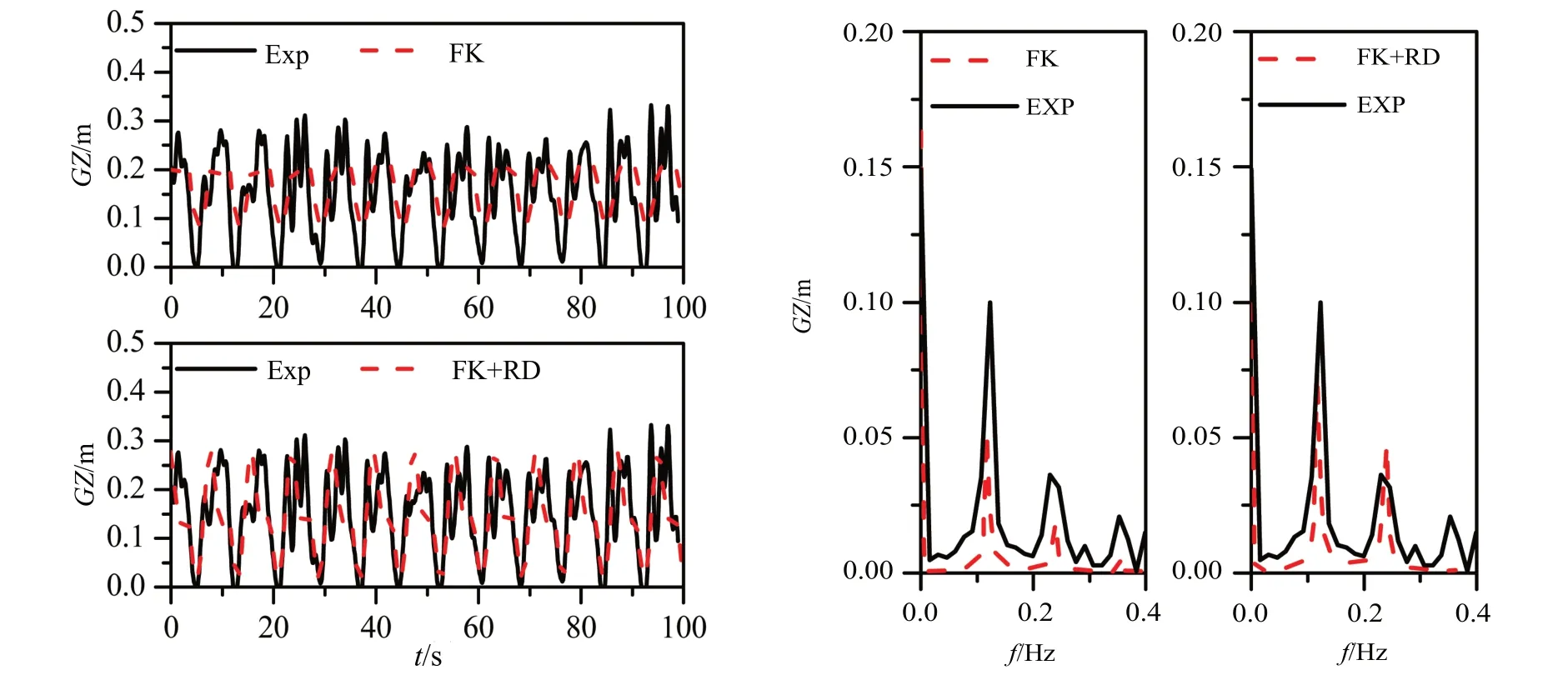
圖7 計(jì)算結(jié)果與模型試驗(yàn)結(jié)果對(duì)比(λ/Lpp=1.0,H/λ=0.03,F(xiàn)r=0.1,φ=8°)Fig.7 Comparison of the calculation results with experimental results(λ/Lpp=1.0,H/λ=0.03,Fr=0.1,φ=8°)
針對(duì)工況λ/Lpp= 1.1、H/λ= 0.03、Fr = 0.15、φ = 18°,時(shí)歷曲線和FFT 分析結(jié)果如圖8 所示,此種工況將航速增加到了Fr=0.15,同時(shí)將固定橫傾角度從8°增加到18°,此時(shí)非線性現(xiàn)象也十分明顯。從時(shí)歷曲線對(duì)比可以看出:僅考慮FK 力的計(jì)算結(jié)果比模型試驗(yàn)結(jié)果小很多,誤差非常大;同時(shí)考慮FK力和R&D 之后的結(jié)果,主要幅值部分與模型試驗(yàn)吻合良好,但模型試驗(yàn)中的高頻成分更加明顯。從FFT 分析可以看出:此種工況下,模型試驗(yàn)中除了第一共振成分外,第二共振成分和第三共振成分也變得十分顯著;僅考慮FK 力的計(jì)算結(jié)果在第一和第二共振頻率處均比模型試驗(yàn)結(jié)果偏小很多;同時(shí)考慮FK 和R&D 之后,計(jì)算得到的第一共振成分和第二共振成分與模型試驗(yàn)吻合良好,但未能捕捉到第三及其它的高頻成分。

圖8 計(jì)算結(jié)果與模型試驗(yàn)結(jié)果對(duì)比(λ/Lpp=1.1,H/λ=0.03,F(xiàn)r=0.15,φ=18°)Fig.8 Comparison of the calculation results with experimental results(λ/Lpp=1.1,H/λ=0.03,Fr=0.15,φ=18°)
總體而言,從對(duì)比結(jié)果可以看出:除零航速的工況,考慮FK 力和R&D 共同作用后,預(yù)報(bào)精度都有提高,尤其是高航速、高波陡的情況,預(yù)報(bào)精度有大幅提高,說(shuō)明動(dòng)態(tài)輻射力和繞射力的貢獻(xiàn)在不斷增加;當(dāng)非線性現(xiàn)象變得更加明顯時(shí),除第一共振頻率外,其它共振頻率的成分會(huì)更加顯著。
3.2 非線性原因分析
從上述模型試驗(yàn)和計(jì)算結(jié)果的對(duì)比研究中發(fā)現(xiàn),波浪中復(fù)原力臂的非線性現(xiàn)象與航速、波陡、橫傾角度等都有關(guān)系:零航速下,增加波陡,非線性特征略有增加;航速增大后,增加波陡和橫傾角度,非線性現(xiàn)象都會(huì)變得十分明顯,因此本文進(jìn)一步分析了非線性特征出現(xiàn)的原因。
3.2.1 復(fù)原力臂不同成分對(duì)比分析
選取工況λ/Lpp= 1.0、H/λ= 0.03、φ = 20°下不同的航速(Fr = 0.0、Fr = 0.1)分析復(fù)原力臂組成中不同成分所占的比重,計(jì)算結(jié)果如圖9 所示。可以看出:零航速下R&D 所占的比重較少,因此基于Froude-Krylov 力假設(shè)即可預(yù)報(bào)波浪中復(fù)原力臂的變化;而有航速時(shí),R&D 占有不可忽視的比重,因此有航速時(shí)采用常規(guī)Froude-Krylov力假設(shè)不再成立,需要進(jìn)一步考慮動(dòng)態(tài)輻射力和繞射力的影響,然而目前大部分的研究中均忽略了該成分。

圖9 復(fù)原力臂不同成分對(duì)比(λ/Lpp=1.0,H/λ=0.03,φ=20°)Fig.9 Comparison of the different components of roll restoring arm variation(λ/Lpp=1.0,H/λ=0.03,φ=20°)
3.2.2 物面全非線性對(duì)計(jì)算結(jié)果的影響
輻射力和繞射力的計(jì)算與Laplace 初邊值問(wèn)題求解中的物面條件有關(guān),上述計(jì)算中考慮到計(jì)算時(shí)間問(wèn)題,因此選用了近似物面非線性條件,也就是輻射力和繞射力的計(jì)算中沿考慮橫傾角度的平均濕表面積分。從計(jì)算結(jié)果可以看出,目前基于近似物面非線性條件的輻射力和繞射力計(jì)算方法可以較好地反應(yīng)第一和第二共振頻率成分,但未能反應(yīng)第三及其它高頻成分。因此,本文進(jìn)一步采用精確物面條件,考慮物面全非線性,直接沿瞬時(shí)濕表面積分計(jì)算輻射力和繞射力開(kāi)展了對(duì)比研究。
選取工況λ/Lpp= 1.0、H/λ= 0.03、Fr = 0.1、φ = 18°,首先對(duì)比兩種物面條件的區(qū)別,圖10 為輻射力和繞射力計(jì)算時(shí)兩種物面條件對(duì)應(yīng)的同一周期內(nèi)不同時(shí)刻船舶-波浪瞬時(shí)濕表面的變化。從圖中可以看出:近似物面非線性條件中,僅考慮了橫傾角度,瞬時(shí)波浪與物面之間始終存在誤差;精確物面條件中,每一時(shí)間都重新劃分網(wǎng)格,瞬時(shí)捕捉船舶-波浪之間的相對(duì)位置,因此更準(zhǔn)確地反映了船舶-波浪相對(duì)位置的變化。圖11 為FK 力和靜水力計(jì)算時(shí)兩種物面條件對(duì)應(yīng)的船舶-波浪瞬時(shí)濕表面的變化,可以看出,兩種物面條件均沿船舶-波浪瞬時(shí)形成的相對(duì)位置積分物面壓力。
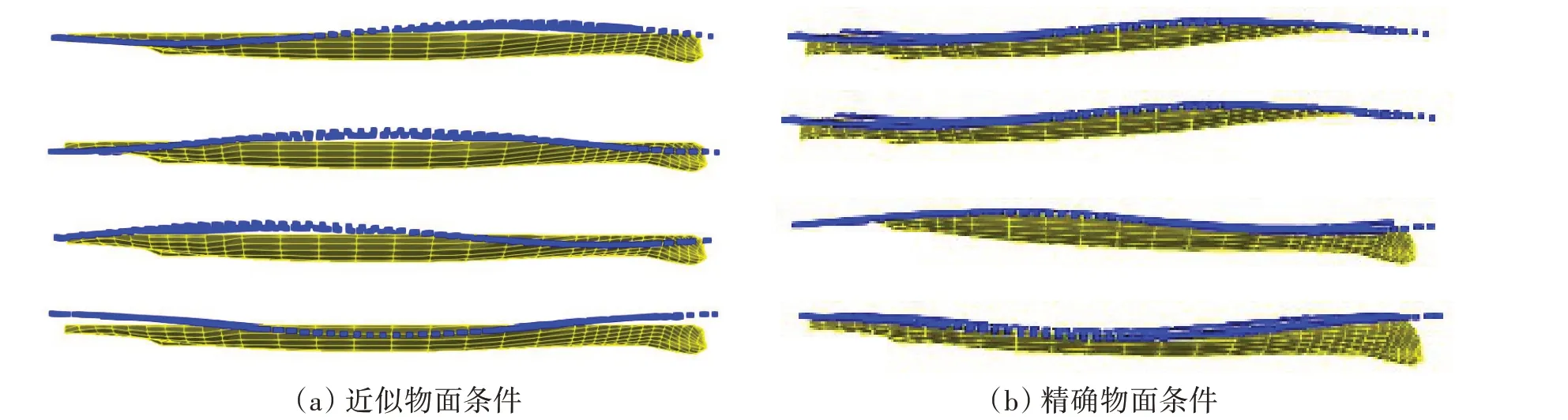
圖10 輻射力和繞射力計(jì)算時(shí)船-波相對(duì)位置的變化Fig.10 Relative position of ship-wave for the calculation of radiation and diffraction forces
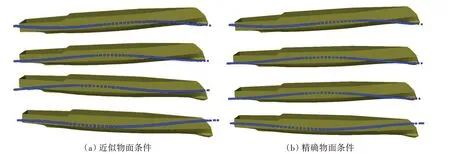
圖11 FK力和靜水力計(jì)算時(shí)船-波相對(duì)位置的變化Fig.11 Relative position of ship-wave for the calculation of FK and hydrostatic forces
進(jìn)一步對(duì)比分析采用近似物面非線性條件和精確物面條件對(duì)計(jì)算結(jié)果的影響,兩種方法計(jì)算得到的時(shí)歷曲線結(jié)果對(duì)比如圖12所示,圖中近似物面非線性條件(Nonlinear)和精確物面(Exact)條件計(jì)算得到的復(fù)原力臂幅值基本一致。進(jìn)一步分析FFT曲線結(jié)果,如圖13所示,首先對(duì)比近似物面非線性條件和精確物面條件計(jì)算得到的GZRD的區(qū)別,精確物面條件能反映除第一和第二共振成分之外的高頻成分(圖13(a)),雖然兩種物面條件計(jì)算得到的GZFK基本一致(圖13(b)和(c)),但同時(shí)考慮FK力和R&D 之后,相比于近似物面非線性條件,精確物面條件除了較好地計(jì)算第一和第二共振成分外,還能較好地計(jì)算模型試驗(yàn)結(jié)果中出現(xiàn)的第三和第四共振成分(圖13(d)和(e))。也就說(shuō)明,精確物面條件能捕捉到部分高階頻率成分,更好地反應(yīng)不同復(fù)原力臂曲線中的不同頻率成分,比近似物面非線性條件更為精確。

圖12 近似物面非線性和精確物面時(shí)歷曲線計(jì)算結(jié)果區(qū)別Fig.12 Comparison of time series calculated by approximate body condition and exact body condition in time domain

圖13 近似物面非線性和精確物面FFT曲線計(jì)算結(jié)果區(qū)別Fig.13 Comparison of FFT analysis results by approximate body condition and exact body condition
3.2.3 線性理論局限性分析
進(jìn)一步將時(shí)間轉(zhuǎn)換到波峰相對(duì)于船長(zhǎng)的位置,研究不同波陡下復(fù)原力臂隨船-波相對(duì)位置的變化。首先是零航速工況下不同波陡的計(jì)算結(jié)果,如圖14所示。從結(jié)果可以看出,僅考慮FK 力和靜水力計(jì)算得到的復(fù)原力臂幅值基本與波陡成正比關(guān)系,船舯位于波峰處復(fù)原力臂最小,且復(fù)原力臂曲線呈規(guī)律性變化,此時(shí)線性假設(shè)適用,這也是大部分二維切片法可以得出的結(jié)論[11]。進(jìn)一步考慮R&D作用之后,復(fù)原力臂幅值與波陡仍然呈正比關(guān)系,但復(fù)原力臂曲線出現(xiàn)多頻率疊加現(xiàn)象,此時(shí)線性假設(shè)不再適用。

圖14 復(fù)原力臂相對(duì)于船舶-波浪相對(duì)位置的變化(λ/Lpp=1.0,F(xiàn)r=0.0,φ=10°)Fig.14 Roll restoring arm variation with the relative position of ship to wave(λ/Lpp=1.0,Fr=0.0,φ=10°)
然后,增加航速到Fr=0.15,計(jì)算結(jié)果如圖15 所示,從結(jié)果可以看出,此時(shí)非線性關(guān)系變得更加明顯,R&D 的作用也更加明顯,說(shuō)明非線性復(fù)原力臂的計(jì)算中應(yīng)該考慮R&D 的影響。復(fù)原力臂隨波陡的關(guān)系呈現(xiàn)明顯的非線性變化,目前已有的基于二維切片法的研究未能證明此種現(xiàn)象。

圖15 復(fù)原力臂相對(duì)于船舶-波浪相對(duì)位置的變化(λ/Lpp=1.0,F(xiàn)r=0.15,φ=10°)Fig.15 Roll restoring arm variation with the relative position of ship to wave(λ/Lpp=1.0,Fr=0.15,φ=10°)
4 結(jié) 論
本文通過(guò)模型試驗(yàn)和數(shù)值計(jì)算研究了ONR 內(nèi)傾船型波浪中復(fù)原力臂的變化,在速度勢(shì)的求解中引入了精確物面的處理方法,實(shí)現(xiàn)了基于瞬時(shí)濕表面的輻射力和繞射力的計(jì)算;并從復(fù)原力臂的組成成分、采用近似物面非線性條件與精確物面條件計(jì)算結(jié)果的對(duì)比、復(fù)原力臂隨船舶-波浪相對(duì)位置的變化分析了復(fù)原力臂變化中非線性特征出現(xiàn)的原因。研究結(jié)果表明:
(1)當(dāng)航速較低、波陡較小時(shí),復(fù)原力臂曲線呈現(xiàn)線性規(guī)律,基于Froude-Krylov力假設(shè)計(jì)算得到的GZFK基本與模型試驗(yàn)結(jié)果吻合;
(2)增加航速以及波陡,GZRD對(duì)共振頻率成分的貢獻(xiàn)不斷增加,考慮FK 和R&D 共同作用后,波浪中復(fù)原力臂的預(yù)報(bào)精度有所提高,尤其在高航速、高波陡的情況下,預(yù)報(bào)精度有大幅提高;
(3)考慮輻射力和繞射力之后,可以預(yù)報(bào)模型試驗(yàn)中出現(xiàn)的部分多頻率疊加的非線性現(xiàn)象,目前基于近似物面非線性條件的R&D 計(jì)算方法可以較好地反應(yīng)第一和第二共振頻率成分,基于精確物面條件的R&D計(jì)算方法可以反應(yīng)第三及其它高頻成分;
(4)波浪中復(fù)原力臂的非線性現(xiàn)象,與航速、波陡、橫傾角度等都有關(guān)系,高航速、高波陡、大橫傾角度下,非線性受外界影響較為明顯;
(5)頂浪中,基于Froude-Krylov 假設(shè)的頂浪復(fù)原力臂預(yù)報(bào)方法不夠完善,需要進(jìn)一步考慮非線性輻射繞射力的影響,此結(jié)論與作者前期針對(duì)外飄船型的結(jié)論一致[15]。
