輔助站立輪椅背部推桿機構優化設計*
2021-06-01 12:56:52
數字技術與應用 2021年4期
(武漢科技大學城市學院機電工程學部,湖北武漢 430083)
0 引言
據國家統計局數據顯示[1],我國老齡化情況越來越嚴重,老齡化帶來的社會問題也愈加突出。隨著人們對養老問題逐漸重視,國內外市場也相繼出現了一些助老產品[2]。但在智能輪椅方面還有極大空白和可改善的方面。
老人生活所存在的困難就是行走能力減弱。在此情況下,將智能機器人技術應用于電動輪椅的智能輪椅越來越引起全社會的重視和關注,對于這方面的基礎研究和產品設備的開發也將是我國未來經濟發展的重要課題。
1 設計方案
1.1 初步設計
現在市面上的輪椅,溢價率較高,安全隱患明顯。這就要求我們的輪椅在物美價廉的基礎上能達到預計的性能。產品的主要功能有輔助站立、電動代步。
輔助站立:采用推桿推動背板和座板的方式實現輔助老人站立的目的。
電動代步:采用搖桿式控制器控制,2公斤24V12AH鋰電池驅動的Y-160M 1-2,11KW,3000r/min型號無刷直流馬達。
1.2 驅動系統
驅動系統由一對驅動橋組成,兩橋各有一套傳動系統,互不影響,由車橋將前后兩驅動橋相連接。驅動系統由變速電機,減速器,帶剎車腳輪,動力傳輸機構組成,驅動形式參考汽車傳動,運動時,變速電機通電轉動,從而帶動齒輪機構運轉,動力傳輸到輪轂帶動輪椅前進。后退時,同理,電機反轉輪椅后退。
1.3 支撐機構
輪椅的機械支撐機構為曲柄搖桿機構,機構由四個構件組成,自由度為2。該輪椅正好有兩個原動件。原動件數等于自由度F,所以機構有確定的運動。
當輪椅由坐立狀態轉變為站立狀態時,推桿A C、B D伸長,由于A 點B 點固定,故A 點B 點無法位移,A 點B 點進行逆時針旋轉,A點帶動C點上升,B點帶動D點上升,最終導致E點角度發生變化,坐立姿E點角度為90°~97°,站立姿時E點角度為153°~168°。
2 方案論證
2.1 底部支撐管件
確定選用部件材料為:LY5052-H112型鋁-鎂合金[3]。
管件的受力:靜置時,負荷主要由底座的兩個支撐以及前方軸承受力。推桿與管件的末端夾角為82.5°,該力可分解為指向桿件的徑向力和垂直于桿件的力所形成的扭矩。
校核強度:

圖1 機械支撐結構圖A.背部推桿固定端;B.底部推桿固定桿;C.輪椅靠背;D.輪椅底板;E.連接桿Fig.1 Mechanical support structureA.back push rod fixed end;B.bottom push rod fixed rod;C.wheelchair back;D.wheelchair floor;E.connecting rod
預設人體重量60kg,座椅上半部分重量30kg,全部作用于管件,管件直徑36mm,壁厚2mm。彎曲與扭轉組合變形強度條件:

空心圓:
由第三強度理論[4]:
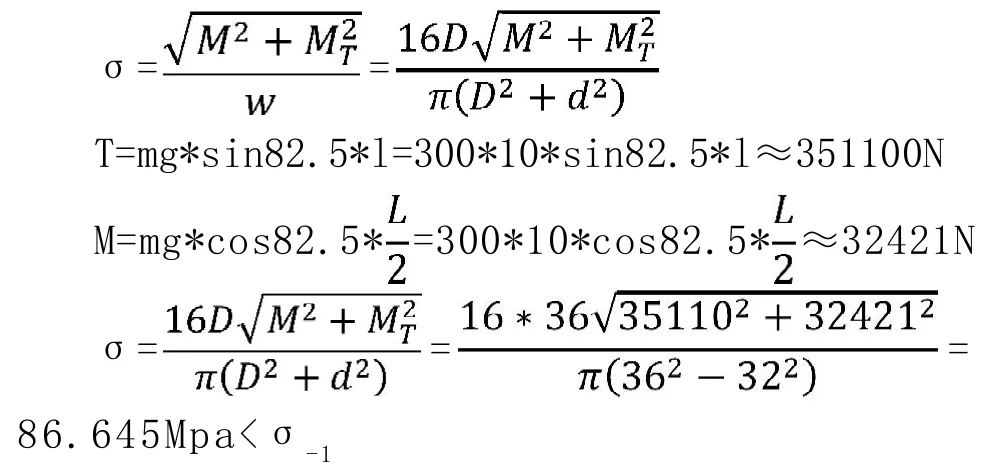
結果表明支撐管件強度要求合格。
2.2 側面支架管件
確定部件選用材質為:選用耐熱鉻合金鋼[5]。
部件的受力:靜置時,負載主要由側面支架管件和底座的支撐管件承受。受力垂直于側管,該力可分解為對側管的扭矩和垂直于側管的力。
強度的校核:
預設人體重量100kg,座椅上半部分重量30kg,管件直徑35mm,壁厚2mm全部作用于兩根管件,取單邊300N。由第三強度理論:
T=G*l=300*100=30000N
M=F*L=1083*500=541666N

側面支撐管件滿足強度要求。

3 背部支起機構力學模型
如圖1,設推桿推力為F,推桿推力為F的方向的位移為dl,背板總成承載力W在豎直方向的位移為dh,可得:
Wdh=Fdl
背部板總成以鉸鏈A 為中心轉動,將上式變換得:
Wrsinθdθ=Fdl
將機構的凡何參數代入上式,得到

為分析m和n對力F的影響,將式對e求導[6]:

由此可知,當輪椅的高度和背板總成長在一定范圍時,伴隨著背部推桿機構行程的增長[7],水平長度m和垂直長度n皆增長,推桿推力F也伴隨著增長。但推桿的最終位置以及品牌型號的確定不但與推力F 相關也與推桿的角速度相關,一定范圍內也與鉸鏈承載力密切相關。團隊通過SolidWorks軟件進行了仿真運動進行了動力學分析,研究推桿推力F 與工作行程、背板角速度的關系,研究結果表明推桿的靜置固定位對其他部件的影響是最大的,亦表明該機構符合設計要求,既節省了材料又提高了產品的可靠性和舒適性。
4 樣機模型試制和檢測
為了檢測產品的功能及性能,根據本文所述本人試制了實物樣機,設計了輪椅的電控系統,采購了所需的電子器件,如圖2所示為組裝完成的輪椅實物,狀態為站立姿。支撐機構將底板及背板伸展的狀態。實驗樣機由所預測的實物按1∶8.25的比例縮放而成,推桿采用型號JIECHANGLAT8的12V 行程為25mm的推桿,驅動采用ELECFANS生產的51單片機小車,動力系統由可充電的12V鋰電池提供,其中推桿及C51單片機小車皆可進行遙控操作。

圖2 實物模型圖Fig.2 physical model
為驗證設計或方案的合理性和正確性,和實物制作的可行性,團隊對樣機的相關功能進行了試驗。
從表1 的輪椅樣機檢測結果分析得出如下結論:

表1 輪椅樣機檢測結果Tab.1 Test results of wheelchair prototype
輪椅的行駛速度和背板抬升速度使用測速器測量,由于樣機組裝和部件摩擦等原因,導致輪椅實際檢測數據與理論數據不符(大部分數據略小于預計值),但是依然能夠滿足的要求結果表明,所設計的實物樣機完全滿足功能和性能要求,實現了預期目標。
5 結語
通過對輔助站立輪椅的受力及約束條件分析,結合電動推桿關鍵關節的實際設計要求,給出了一種在尺寸限制條件下能夠承擔老人重量的輔助站立輪椅設計方案,保證了關鍵關節的設計性能,為整個輪椅的結構設計奠定了可靠的基礎。同時由于對電動推桿應用于輔助站立輪椅方面的設計案例報道較少,本文對相關工程設計工作具有一定的參考與應用價值。