基于視頻圖像車速計算的隨機誤差分析
2021-05-31 03:10:08吳卓鴻
保山學院學報 2021年2期
關鍵詞:影響
王 迪 魏 亮 龔 標 吳卓鴻
(1.云南省交通科學研究院有限公司,昆明 650011;2.云南云通司法鑒定中心,昆明 650255;3.公安部交通管理科學研究所,無錫 214151)
基于視頻圖像車速計算的精度是社會各界一直以來關注的焦點,對基于視頻圖像車速計算中“時間插值法”數學模型進行的誤差分析,就是為了找出誤差產生的原因、影響誤差的關鍵因素、降低誤差影響的方法等從而提高計算精度,以便更加真實客觀地反映車輛行駛的運動狀態。
誤差是實驗科學術語,指測量結果偏離真值的程度。對任何一個物理量進行的測量(檢測)都不可能得出一個絕對準確的數值,即使使用測量技術所能達到的最完善的方法或設備,測出的數值也和真實值存在差異,這種測量值和真實值的差異稱為誤差。基于視頻圖像車速計算的誤差由隨機誤差和系統誤差構成[1],針對基于視頻圖像車速計算的隨機誤差進行分析研究。
1 隨機誤差產生的原因
以“時間插值法”數學模型為例,分析基于視頻圖像車速計算中隨機誤差產生的原因。設目標車輛以100km/h的速度行駛,利用“時間插值法”數學模型進行車速計算的過程,如圖1所示。

圖1 100 km/h車速分析示意圖
首先在視頻畫面中建立直角坐標系,設車輛沿X軸(水平)方向運動,以軸距為標尺,以某一幀畫面為基準,前輪輪心A(標尺終點)的X坐標為a;經過2幀后,后輪輪心運動到B點處,此時B點接近A點,其X坐標為b;再經過1幀后,后輪輪心運動到C點處,此時C點超過A點,其X坐標為c。利用”時間插值法”數學模,計算車輛行駛過一個標尺長度的精確時間。
設視頻幀速率為25 fps,則車輛行駛過一個標尺的時間:
T=2×0.04+△t
其中:
△t=0.04×(b?a)/(b?c)
則車輛行駛過一個標尺長度(L)的平均速度:
v=L/(2×0.04+△t)
“時間插值法”就是利用A、B、C三個點的X坐標值a、b、c,計算出車輛駛過一個標尺的時間T的數值,從而計算出車速[2]。因“時間插值法”數學模型中僅有a、b、c的值為測量量或不確定量,故在視頻畫面中找到A、B、C位置(簡稱找點,下同)的精度就決定了“時間插值法”的計算精度。
2 影響隨機誤差的因素
通過大量的工作實踐及研究論證,基于視頻圖像車速計算的精度主要取決于兩方面的條件:一是客觀條件,主要由視頻本身的質量所決定,包括視頻圖像的清晰度、分辨率、拍攝視頻圖像的攝像機距離距肇事地點的距離、肇事目標車輛的行駛速度等,這些因素在視頻圖像拍攝過程中就已決定,在進行車速分析過程中人工無法對其進行干預;二是主觀條件,主要由進行車速分析的實際操作人員的技術水平所決定,包括計算模型的選取、計算標尺的選取、操作熟練度等,這些因素在車速計算過程中起作用并直接影響計算精度(僅對計算標尺的選取進行研究)。
在進行車速計算的過程中,主、客觀因素同時存在,因客觀因素無法改變,故只能在基于現有客觀因素的條件下,綜合分析,合理選擇計算模型、計算標尺等,達到減小隨機誤差影響的目的[3]。
3 隨機誤差影響因素的研究
3.1 計算標尺的選取對隨機誤差的影響
對上例進行廣義化,根據“時間插值法”數學模型,T=n×(1/f)+△t,模型中n、f兩個參數不依賴于選點精度,僅△t依賴于選點精度。當選取的標尺較長時,目標車輛行駛過一個標尺的時間較長,n值較大,此時△t對T的影響程度較小,隨機誤差也較小。反之,若選取的標尺較短時,則△t對T的影響較大。設誤差為一固定值e,“時間插值法”數學模型中的可靠值為k=n×(1/f),k是以1為首項,公差為1的等差數列,則e在k中的影響比例如圖2所示。
加強相關工作人員的責任心。檔案工作目前還存在著,資料歸檔、整理不及時,工程施工、檢查記錄與工程施工不同步、資料與實際情況不相符及記錄不規范的現象。我們采取了一是項目部設有專人負責工程資料的收集;二是編制了統一的表格,盡量使記錄表格化,并細化相關填寫標準;三是公司本部及項目部技術人員,分別經常性地組織檢查,按檢查結果進行獎懲等措施,努力提高管理工作水平。
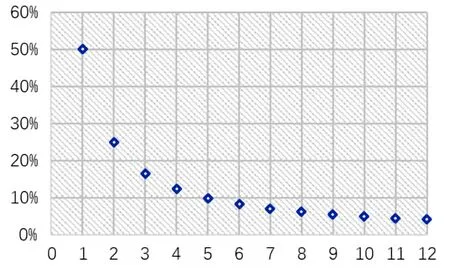
圖2 誤差占比示意圖
因此,運用“時間插值法”數學模型進行車速計算時應盡根據實際情況盡可能的選取較長的標尺以增加可靠值k的比重,降低△t的比重從而減小隨機誤差的影響。
3.2 目標車輛行駛速度對隨機誤差的影響
在計算標尺一定的情況下,當目標車輛行駛速度越快時,目標車輛行駛過一個計算標尺的時間越短,可靠值k的比重越低,△t的比重越高,找點的誤差對計算誤差的影響越大;反之,若行駛車速越低,車輛行駛過一個標尺的時間就越長,可靠值k的比重越高,△t的比重越低,找點誤差對計算誤差的影響就越小。
例如標尺(軸距)為2.61 m的目標車輛以100 km/h的速度行駛,2幀行駛2.22 m,不足一個標尺長度,3幀行駛3.33 m,超過一個標尺長度。用“時間插值法”數學模型計算車速,得:
v=L/(2×(1/f)+△t)
因△t在分母中所占比重相對較大,故找點誤差對計算結果的影響就相對大。
若目標車輛以50 km/h的速度行駛,4幀行駛2.22 m,不足一個標尺長度,5幀行駛2.78 m,超過一個標尺長度。用“時間插值法”數學模型計算車速,得:
v=L/(4×(1/f)+△t)
因△t在分母中所占比重相對較小,故找點誤差對計算結果的影響就相對小。
3.3 目標車輛至監控攝像頭的距離對隨機誤差的影響
為了研究目標車輛至監控攝像頭的距離對隨機誤差的影響,研究人員進行了驗證試驗。試驗中目標車輛由遠及近駛來,非接觸式速度儀記錄目標車輛行駛速度,攝像機拍攝視頻,見圖3。

圖3 目標車輛至鏡頭距離的影響驗證試驗
研究人員進行了10人次的跟蹤找點(跟蹤時均是在同一個坐標系下進行),利用“時間插值法”數學模型,以軸距為標尺計算出10組共350個數據(即時間速度相對應的一對數據),繪制時間?速度曲線圖,在每一時刻的10個數據中找出最大值(MAX)和最小值(MIN),得到兩組數據,將這兩組最大最小值數據與非接觸式速度儀記錄的一組數據(MEA)一并繪入圖中,對這三組數據分別進行線型回歸,得到三組數據的擬合線,以最大值數據組的擬合線作為上偏差,以最小值數據組的擬合線作為下偏差,則上下偏差之間形成誤差帶,非接觸式速度儀記錄的數值位于誤差帶內,如見圖4所示。
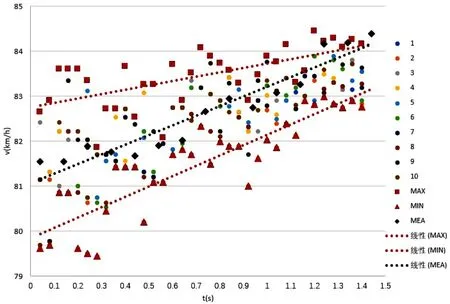
圖4 目標車輛距攝像頭距離對誤差帶的影響
在圖4中可以看到:總共350個數據中只有32個數據落在了誤差帶以外,而有近90.86%的數據都落在了誤差帶內;遠端速度波動范圍為3 km/h,近端速度波動范圍為1 km/h,誤差帶寬度由遠到近逐漸變窄。
研究人員對遠端及近端的找點誤差(10人次找點X軸坐標值)進行了統計,統計分析顯示不管遠端還是近端,特征點X坐標值均在1~2個像素范圍內波動。所以通過10人次找點試驗可以看出,目標車輛距攝像頭的距離對找點精度影響不大,如圖5所示。
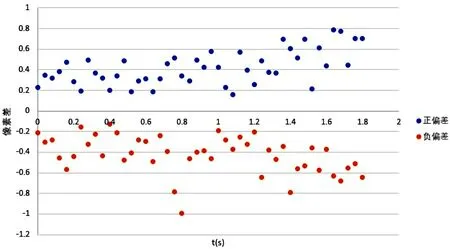
圖5 目標車輛距攝像頭距離對找點精度的影響
分析認為:遠端每個像素代表的實際距離較長,畫面中代表一個標尺內的像素數較少,因找點精度問題造成的誤差較大,所以計算出的車速誤差較大;而近端每個像素代表的實際距離較短,畫面中一個標尺內的像素數較多,因找點精度問題造成的誤差較小,所以計算出的車速誤差小。
3.4 圖像清晰度對隨機誤差的影響
為了研究圖像清晰度對隨機誤差的影響,研究人員分別對模糊圖像和清晰圖像進行了找點分析。圖6展示的是模糊圖像找點時的景象,其中下圖為圖像畫面放大6倍之后的情況。

圖6 模糊圖像找點時的景象
可以看出在模糊圖像中找點是相當困難的,研究人員用前述方法,進行了12人次的找點試驗,繪制出模糊圖像的誤差帶[4]。通過圖7可以看出,當圖像模糊時,誤差帶寬度比較大,均值為13.43 km/h。
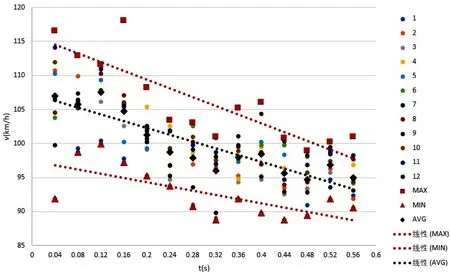
圖7 模糊圖像的誤差帶
圖8展示的是清晰圖像找點時的景象,可以看出與模糊圖像找點相比較,清晰圖像找點時容易得多。通過圖9可以看出,當圖像清晰時,誤差帶寬度比較小,均值僅為1.05 km/h。

圖8 清晰圖像找點時的景象

圖9 清晰圖像的誤差帶
經過以上分析可以得到結論:視頻圖像清晰度是造成隨機誤差的關鍵因素,根據隨機誤差的特點,對于圖像模糊的視頻資料,只能通過加大找點次數采取多次跟蹤取均值的辦法來盡可能的逼近真值。
3.5 圖像分辨率對隨機誤差的影響
一般情況下,跟蹤點的X、Y坐標是以像素為單位的。對于704×576的視頻,X坐標范圍是0—704,Y坐標范圍是0—576;對于1920×1080的視頻,X坐標范圍是0—1920,Y坐標范圍是0—1080,以此類推。
圖10展示了不同分辨率下搜索特征點真實位置的情況(在這里以方形像素為例,實際中像素有多種形狀),其中設O點為特征點真實位置。由于像素不是一個無限小的點而是一個微小單元,所以要搜索到特征點的真實位置幾乎是不可能的。如果拍攝同一個物體,在低分辨率情況下,每個像素所占單元比高分辨率情況下每個像素所占的單元要大。單元ABCD代表低分辨率的一個像素,單元A′B′C′D′代表高分辨率的一個像素,低分辨率下跟蹤點A比跟蹤點B更接近于O,高分辨率下跟蹤點B′比跟蹤點A′(A)更接近于O。以上分析說明分辨率越高,就越容易找到逼近特征點真實位置的跟蹤點,由于跟蹤點與特征點真實位置越近,計算分析結果越準確,所以高分辨率圖像的計算結果比低分辨率圖像的計算結果更精確。
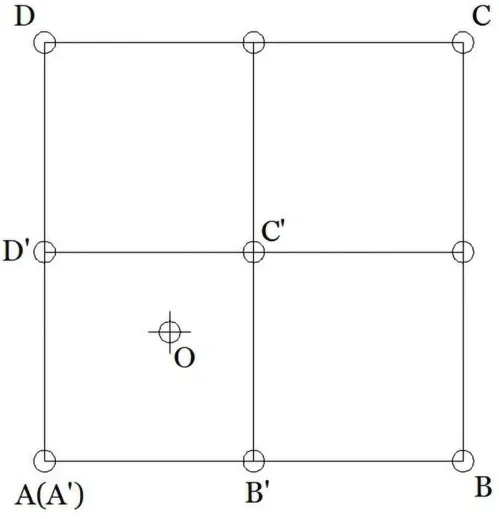
圖10 不同分辨率下搜索特征點的真實位置
為研究不同圖像分辨率下的隨機誤差,對同一段視頻圖像進行了分辨率處理,得到視頻圖像高、低分辨率的不同版本,用前述方法,分別對高、低分辨率情況下的同樣畫面進行了10人次的找點試驗,繪制出不同分辨率下的誤差帶,通過圖11可以看出,兩段不同分辨率下的跟蹤誤差帶類似,誤差帶寬度均值分別為1.09 km/h和1.01 km/h,由此得出結論:圖像分辨率對計算誤差有一定影響,但影響不顯著。
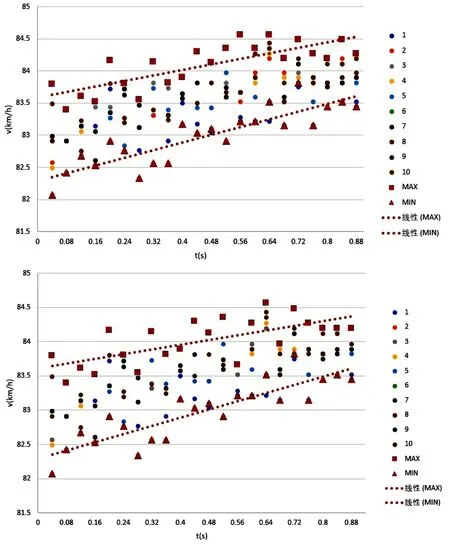
圖11 不同分辨率下的誤差帶
4 結論
在各類客觀因素中,視頻圖像的清晰度直接影響目標車輛特征點的定位精度,是決定計算誤差的最關鍵因素,對于圖像模糊的視頻資料,只能通過加大計算次數,獲得均值從而盡可能逼近真值;
目標車輛距攝像頭的距離是影響計算誤差的主要因素。目標車輛距攝像頭的距離近,畫面中一個標尺內的像素數多,找點誤差造成的相對誤差小;目標車輛距攝像頭的距離遠,畫面中一個標尺內的像素數少,找點誤差造成的相對誤差大。
分辨率對計算誤差有一定影響,目前常用的監控視頻的分辯率(704×576)完全能滿足交通事故分析及車速鑒定的要求。
跟蹤標尺的選取是計算誤差的影響因素之一,盡量選取大標尺可以減小計算誤差。
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
家庭影院技術(2020年10期)2020-12-14 07:54:18
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
知識經濟·中國直銷(2016年3期)2016-02-27 16:15:49
現代檢驗醫學雜志(2014年6期)2014-02-02 03:02:04
閱讀與作文(小學低年級版)(2011年3期)2011-01-01 00:00:00