基于電子液壓制動系統的防抱死冗余控制研究*
2021-05-24 05:45:28熊璐許竹君舒強冷搏于宜澤
汽車技術 2021年5期
關鍵詞:系統
熊璐 許竹君 舒強 冷搏 于宜澤
(1.同濟大學,上海 201804;2.上海同馭汽車科技有限公司,上海 201806)
主題詞:電子液壓制動 防抱死冗余 滑移率控制
1 前言
集成式電子液壓制動(Integrated Electronic Hydraulic Braking,I-EHB)系統是電子液壓制動(Electronic Hydraulic Braking,EHB)系統的一種,它通過電機驅動主動建壓裝置為制動系統建壓,實現制動踏板與主缸建壓的解耦,從而快速、準確、穩定地響應控制算法計算出的期望主缸液壓力。以此為基礎,可以通過設計主缸液壓力控制算法實現制動防抱死、車身穩定性控制等功能[1],滿足汽車智能化的需求。由于I-EHB系統復雜度低、可靠性較高,目前越來越廣泛地應用于乘用車,成為當前汽車制動系統發展的趨勢之一。
利用I-EHB 實現制動防抱死功能主要需要解決主缸液壓力控制和制動防抱死功能實現這2 個方面的問題。I-EHB 系統主缸液壓力控制實際上是對電動機的控制,控制器輸出為電動機的命令電流或命令力矩,常以主缸液壓力為控制變量。常用的控制方法包括PID控制[2]、基于增益調度的PI 控制[3]、自適應魯棒控制器[4]和滑模變結構控制器[5]等。利用I-EHB 實現制動防抱死功能,可借鑒傳統ABS 的控制算法。邏輯門限值控制[6]是一種基于經驗參數的控制方法,設計過程中需通過大量試驗數據對控制器參數進行調試。基于滑移率控制的防抱死制動控制算法將車輪縱向滑移率作為控制對象,通過改變制動力使車輪實時縱向滑移率追蹤其最優值,從而提升制動效能。目前基于最優滑移率控制原理的防抱死制動方法主要有PID 控制[7]、滑模變結構控制[8-9]、最優控制[10]、神經網絡控制[11]等。
本文基于I-EHB 系統,針對傳統ABS 功能失效的情況,設計基于主缸液壓力控制的防抱死冗余控制算法。首先構建基于I-EHB 防抱死冗余系統架構,其次采用串級控制理論,分別設計內環主缸液壓力控制算法與外環滑移率控制算法,最后通過臺架和實車試驗驗證算法的有效性。
2 防抱死冗余系統架構
2.1 防抱死冗余功能定義
當常規ABS 失效時,液壓控制單元(Hydraulic Control Unit,HCU)中閥系全開,相當于制動主缸與制動輪缸直接連通,此時制動系統中主缸與輪缸液壓力相等。對主缸液壓力的調節可以直接作用于四輪輪缸中,實現對車輪滑移率的控制,從而在制動過程中避免車輪抱死。
防抱死冗余系統工作步驟為:駕駛員踩下制動踏板后,I-EHB 系統中的位移傳感器獲取踏板開度,通過CAN 發送給防抱死冗余控制器,控制器根據踏板開度解析駕駛員制動意圖。滑移率控制算法以最大限度利用地面附著能力和兼顧駕駛員制動意圖為目標,計算參考主缸液壓力。根據參考主缸液壓力,控制器通過液壓力控制算法計算得到電機轉矩,并通過CAN 向I-EHB發送電機力矩指令以調節主缸液壓力。
2.2 防抱死冗余系統控制策略設計
2.2.1 防抱死冗余系統整體結構
由防抱死冗余功能的需求分析,設計防抱死冗余系統控制策略,系統整體結構如圖1所示。
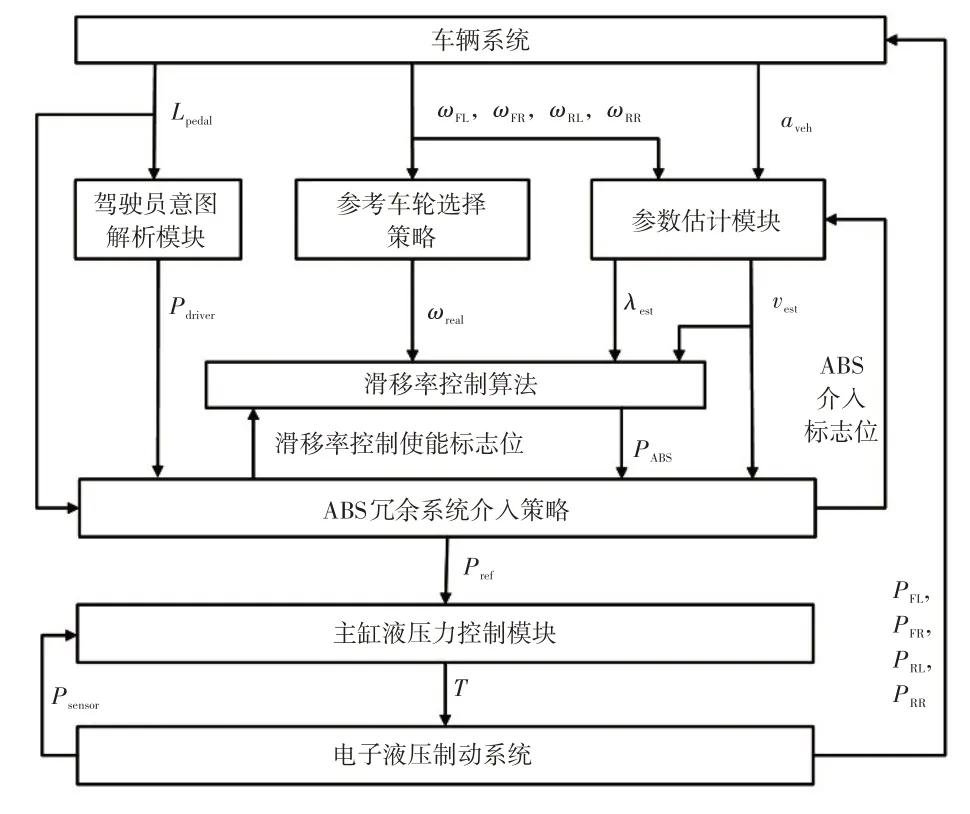
圖1 防抱死冗余控制系統整體結構
車輛系統中,傳感器獲取車輛踏板開度信號Lpedal、四輪輪速信號ωFL、ωFR、ωRL、ωRR以及車身加速度信號aveh;駕駛員意圖解析模塊根據Lpedal得出駕駛員此刻期望的主缸液壓力Pdriver;參考車輪選擇策略對4個車輪的抱死程度進行分析,選出作為控制對象的車輪角速度ωreal;參數估計模塊根據獲取的車輛信息估計當前車速vest和路面附著系數λest;滑移率控制算法計算使車輪達到目標滑移率時的主缸液壓力PABS;ABS 冗余系統介入策略兼顧駕駛員意圖與防抱死需求決定是否介入;主缸液壓力控制模塊輸出電機力矩T控制主缸液壓力跟蹤上層給出的目標液壓力Pref;電子液壓制動系統反饋當前主缸液壓力Psensor給主缸液壓力控制模塊,并為輪缸建壓,從而產生4個車輪的制動液壓力PFL、PFR、PRL、PRR。
2.2.2 參考車輪選擇策略
傳統ABS 通過HCU 控制車輪滑移率,可以對多個車輪的制動力進行單獨控制。但由于提出的防抱死冗余系統的執行器為I-EHB 中的電機,即只能對主缸液壓力進行控制,4個輪缸液壓力始終與主缸液壓力保持一致,無法實現對輪缸液壓力的單獨調節,因此產生選擇哪個車輪的滑移率作為控制對象的問題。
ABS冗余系統作為失效備份系統,應首先考慮車輛安全性,保證4 個車輪均不抱死,以提高車輛制動穩定性。因此本文使用“四輪低選”策略對參考車輪進行選擇,選取4 個車輪中滑移率最大的車輪作為控制對象。由于無法對四輪輪缸單獨控制,因而難以保證四輪均處于峰值附著系數對應的最佳滑移率,無法最大限度地利用地面附著能力。
2.2.3 算法介入退出策略
當制動踏板開度與車速均大于0時,滑移率跟蹤算法開啟,實時計算使當前被控車輪不打滑的主缸液壓力PABS。當Pdriver<PABS時,防抱死冗余控制不介入。根據防抱死制動法規[12],車速小于15 km/h時允許車輪抱死,此時防抱死冗余算法退出。
2.3 車輛制動過程狀態估計
2.3.1 車速估計
以輪速信號和車身減速度信號作為輸入,參考最大輪速法和斜率法,利用基于運動學的車速估計方法,結合運動學公式利用積分運算進行車速估計。
當車輛平穩行駛時,輪速可以反映實際車速,選取最大輪速vwhl_max作為車速估計值:

式中,r為車輪半徑。
ABS 冗余系統介入之后,由于車輪滑移率較大,輪速與實際車速相差也較大,輪速信號已經不可信,無法直接使用輪速信號判斷車速,故以ABS冗余系統介入時的最大輪速作為初始速度,使用車身加速度信號進行積分得出估計車速:

2.3.2 路面識別
該模塊判斷當前行駛路面附著系數的高低,為滑移率控制器設置不同的最佳滑移率和控制參數,從而實現不同路面條件下防抱死制動功能。在高附情況下,取參考滑移率為0.2;低附情況下,取參考滑移率為0.1。本文參考博世開發的基于門限值控制策略的道路識別方法[13],根據車輪角減速度和車身減速度在高附路面上較大而在低附路面上較小的特點,作為路面識別的依據,如圖2所示。
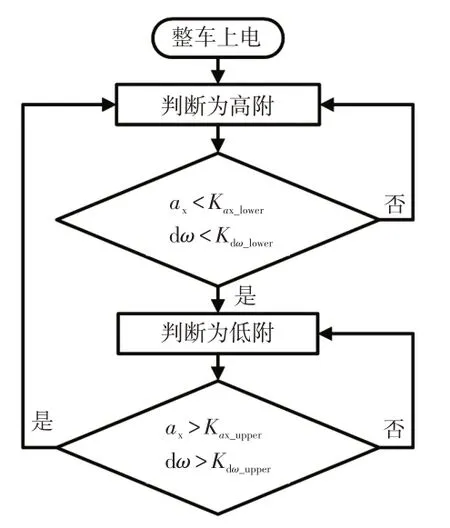
圖2 路面識別算法
圖2 中,ax為車身減速度,dω為4 個車輪角減速度中的最小值,Kax_upper和Kax_lower分別為車身減速度上、下閾值,Kdω_upper和Kdω_lower分別為車輪角減速度上、下閾值。dω可使用多點輪速信號以及數值微分方法進行估算[14]:

式中,n為用于計算車輪角加速度的信號數量,根據輪速信號質量,可選擇3~6;t為按時間順序排列的信號值序號。
3 防抱死冗余控制算法
防抱死冗余控制算法結構如圖3所示,通過采用串級控制理論實現車輪滑移率的控制,內環負責調節IEHB主缸液壓力,外環以參考滑移率為目標,使實際滑移率跟蹤目標滑移率。為實現防抱死冗余控制,分別設計主缸液壓力控制算法和滑移率跟蹤控制算法。
3.1 主缸液壓力控制算法
3.1.1 I-EHB系統特性研究
I-EHB系統包含電機、減速機構、制動主缸、制動液等,是一種非線性系統。簡化的系統數學模型為:

式中,m為機械部分等效質量;x為主缸制動腔活塞的軸向位移;c為機械部分等效阻尼;kM為機械部分等效剛度;i為機械部分傳動比;R為機械部分小齒輪半徑;為機械與液壓部分的摩擦力總和;p為主缸液壓力;A為活塞的等效面積。
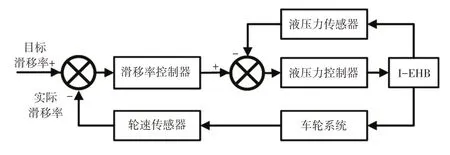
圖3 防抱死冗余控制算法架構
為進一步研究系統特性,搭建了I-EHB 系統試驗臺架,其結構如圖4 所示。臺架部件關鍵參數如表1所示。
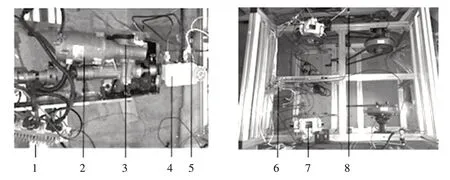
圖4 I-EHB系統試驗臺架
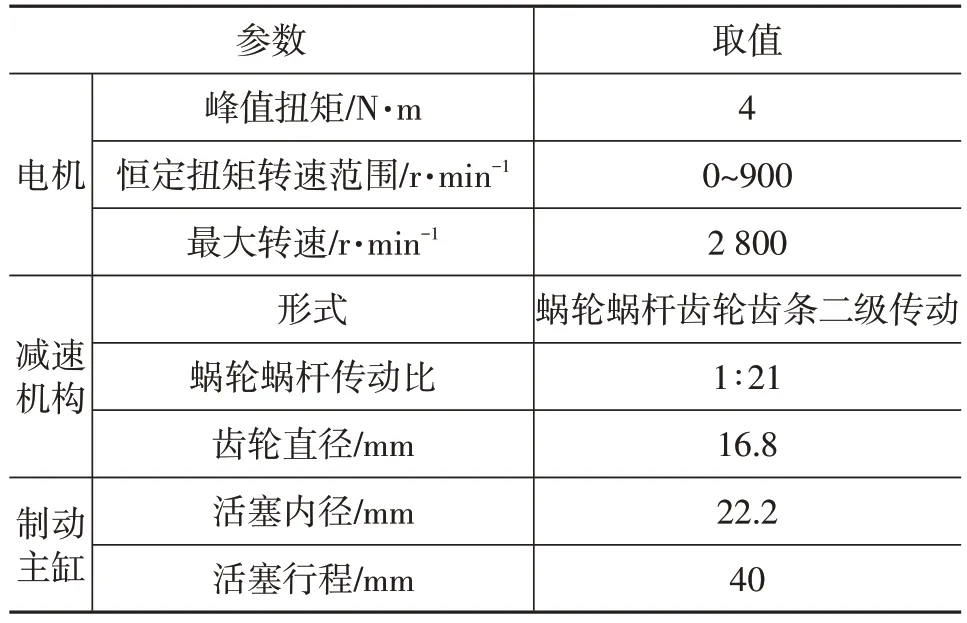
表1 I-EHB系統試驗臺架關鍵參數
通過I-EHB 系統臺架試驗,得到I-EHB 系統在階梯電機力矩輸入下的液壓力響應,如圖5所示。階躍力矩輸入分別為0.3 N·m、0.9 N·m、1.5 N·m、2.1 N·m,可以看出電機力矩與主缸液壓力間呈現出較強的非線性關系。因此,采用抗積分飽和滑模控制方法對I-EHB系統驅動電機進行控制,跟蹤主缸液壓力參考值。
3.1.2 主缸液壓力跟蹤控制律設計
主缸液壓力跟蹤誤差定義為:

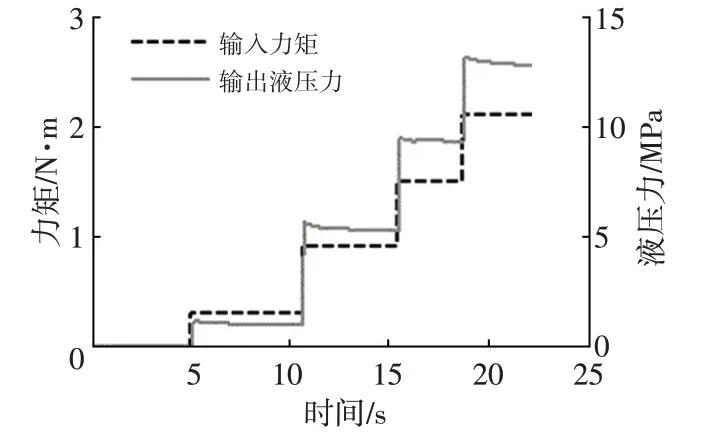
圖5 I-EHB系統階梯力矩輸入響應曲線
在防抱死制動過程中,主缸的建壓速度至關重要。為了提高響應速度,令施加的電機力矩表示為:

式中,kpMC為正比例系數,取值越大,趨近滑模面的速度越快,取為電機最大力矩4 N·m。
為減弱滑模控制器的抖振問題,采用飽和函數替代符號函數:
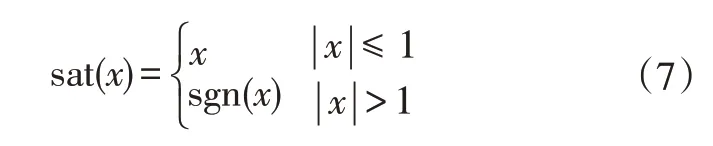
得到連續滑模控制律:

式中,θMC>0為飽和函數邊界層厚度。
采用飽和函數可以改善系統抖振問題,但同時會帶來跟蹤誤差,采用滑模積分控制可以改善邊界層內響應以減小誤差。為避免積分飽和,增加抗積分飽和后的滑模控制器為:

式中,kiMC>0為積分增益系數;sMC為誤差變量;σMC為中間變量。
當控制誤差|sMC|≥θMC時,電機力矩T=-kpMC·sgn(sMC),系統狀態可以迅速逼近滑模面,誤差快速減小;當控制誤差|sMC|<θMC時,有:
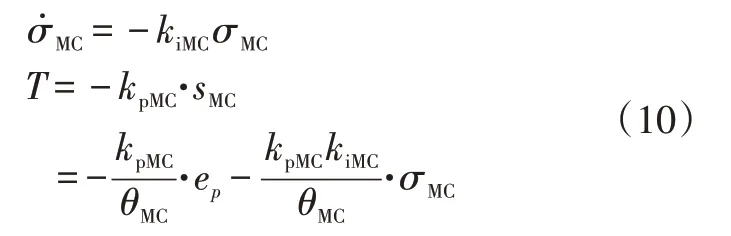
可見,此時輸出的電機轉矩為以跟蹤誤差比例項和積分項為參數的函數。
3.2 滑移率控制算法
3.2.1 制動過程分析
根據單輪模型的受力分析,車輪制動過程中的動力學方程為:
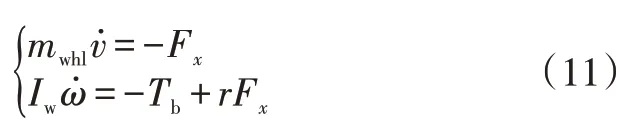
式中,mwhl為1/4整車質量;IW為車輪轉動慣量;Fx為地面施加給輪胎的制動反力;v為車速;ω為輪速;Tb為制動器摩擦力矩。
車輪未抱死時,制動器的摩擦力矩可以表示為制動缸的液壓力函數:

式中,pwhl為制動輪缸液壓力;Kef為與制動器結構、摩擦因數有關的量。
當制動踏板開度過大,導致車輪在Tb的作用下使得制動器制動力超過地面附著力限制時,車輪將出現抱死現象。通常使用輪胎縱向滑移率λ來表示車輪的滑動情況:

路面附著系數隨滑移率的變化關系如圖6所示,其中μx為縱向附著系數,μy為橫向附著系數。
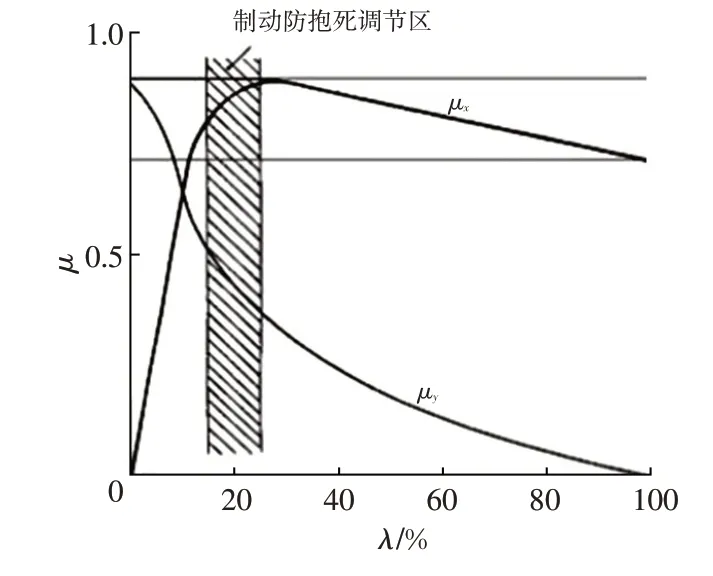
圖6 附著系數-滑移率特征曲線
由圖6可見:當滑移率超過峰值附著系數對應的最佳滑移率區間時,制動力隨著滑移率的增大而減小,制動效能降低;同時,由于輪胎的縱側耦合特性,滑移率大時輪胎側向力極限值也會減小,削弱制動穩定性。防抱死控制器的作用就是把車輪滑移率控制在最佳滑移率附近,綜合提高制動性能。
3.2.2 滑移率跟蹤控制律
由于附著系數與滑移率之間呈非線性關系,選用抗積分飽和滑模控制算法進行滑移率控制。考慮車速接近于0 時式(13)計算溢出,將式(13)改寫,以車輪角速度為控制量控制車輪滑移率:

將參考滑移率λref代入式(14)可得參考車輪角速度:

選取滑模變結構切換函數為車輪角速度誤差:

設計車輪最優滑移率滑模控制的控制律為:

由式(12),Tb正比于輪缸液壓力,根據前述分析,此時輪缸液壓力等于主缸液壓力,因此將控制律改寫為:

式中,kp為正比例系數,一般設計為在允許的控制范圍內的最大值,故取值為主缸最大液壓力10 MPa。
將符號函數改寫為飽和函數,得:

式中,θp為飽和函數邊界層厚度,為常數。
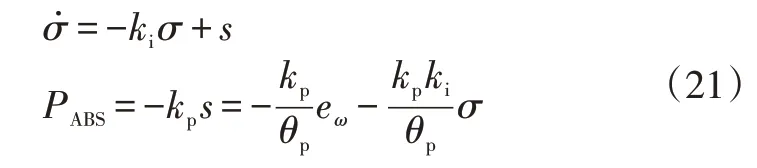
未避免積分項飽和,同時減小跟蹤誤差,引入誤差變量s,將滑移率控制律設計為:

式中,σ為中間變量,ki為控制誤差的積分增益系數,為正常數。
當控制誤差|s|<θp時,有:
4 防抱死冗余控制試驗
4.1 硬件在環試驗
基于圖4所示的I-EHB系統試驗臺架,搭載防抱死冗余控制系統,并根據試驗車輛參數利用CarSimRT 進行動力學建模,車輛參數如表2 所示。利用NI PXI 的LabVIEW RT 系統進行傳感器參數采集,搭建了硬件在環試驗平臺。其組成結構和工作原理如圖7所示。

表2 試驗車輛整車參數
路面設置為:低附路面附著系數為0.2,高附路面附著系數為0.8;對接路面為前段附著系數0.8,后段附著系數0.2;對開路面為左側附著系數0.8,右側附著系數0.2。車速為60 km/h,駕駛員輸入階躍18 MPa的期望液壓力。
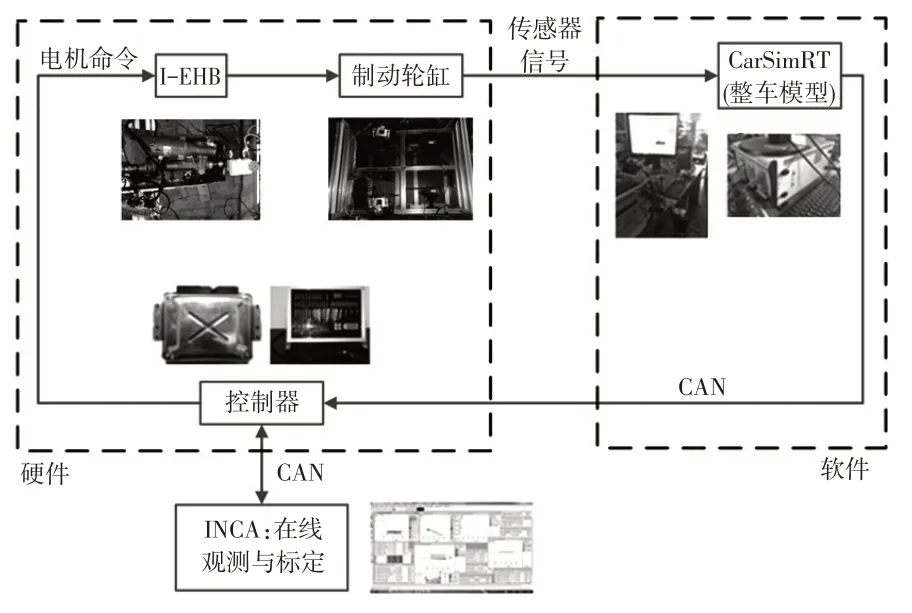
圖7 硬件在環試驗平臺工作原理
4.1.1 高附路面控制效果
如圖8 所示,在高附路面上,路面識別模塊在算法剛介入時判斷為低附,這是由于駕駛員輸入為階躍信號,車輛剛開始減速ABS 即介入,減速度要經歷由0 降低的過程,先經過低附路面的門限值,短暫時間后判斷正確。從輪速情況來看,初始時刻出現較大滑移率之后算法能控制車輪滑移率在目標滑移率附近,達到防抱死的要求,平均制動減速度為6.05 m/s2,附著系數利用率為77.2%。

圖8 臺架試驗高附路面制動情況
4.1.2 低附路面控制效果
如圖9 所示,在低附路面上,ABS 冗余也可以有效防止車輪抱死。前0.5 s液壓力波動導致輪速與車身速度波動,0.5 s后車輪滑移率在目標值附近抖動,路面識別模塊正確判斷路面,平均制動減速度為1.33 m/s2,附著系數利用率為67.9%。
4.1.3 對接路面控制效果
如圖10所示,當路面從高附切換到低附時,路面識別模塊對路面的判斷有0.4 s 的延遲,這是由于路面切換時前、后輪處于不同附著條件路面,車身加速度抖動,帶來路面識別的短暫延遲。兩前輪會在剛進入低附的前0.3 s 抱死,這是由于液壓系統的遲滯產生的。進入低附路面0.3 s之后,滑移率被控制在穩定的范圍內,達到防抱死控制目的。
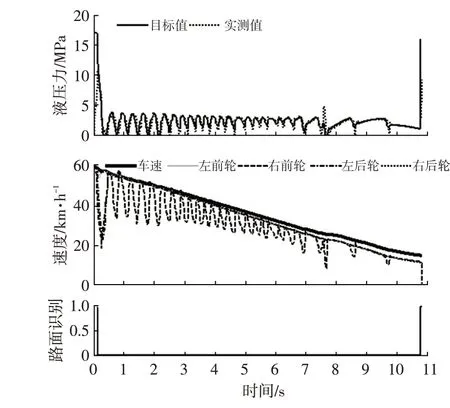
圖9 臺架試驗低附路面制動情況
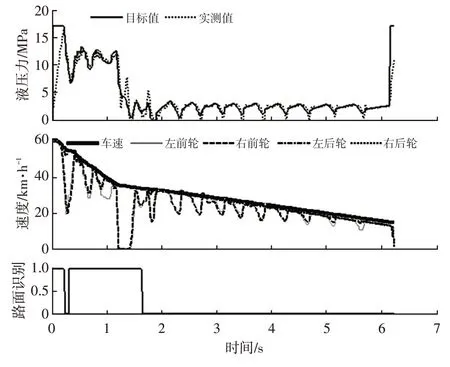
圖10 臺架試驗對接路面制動情況
4.1.4 對開路面控制效果
如圖11所示,在對開路面上,低選策略以右前輪作為參考車輪,滑移率在目標值附近波動,達到防抱死控制目標。
試驗結果表明,基于I-EHB主缸液壓力控制的ABS冗余算法能夠較好地實現車輛防抱死,在常規ABS失效時保證車輛制動過程的穩定性。
4.2 實車試驗
為驗證基于I-EHB 主缸液壓力控制的防抱死冗余系統的實際效果,分別在高附和低附路面上對車輛進行制動試驗。試驗車輛和場景如圖12 所示,該試驗平臺由江鈴E400 型電動車改裝而成,將其傳統的真空助力制動系統替換為電子液壓制動系統,I-EHB系統參數見表1。試驗車輛整車參數見表2,車輛制動器參數如表3所示。
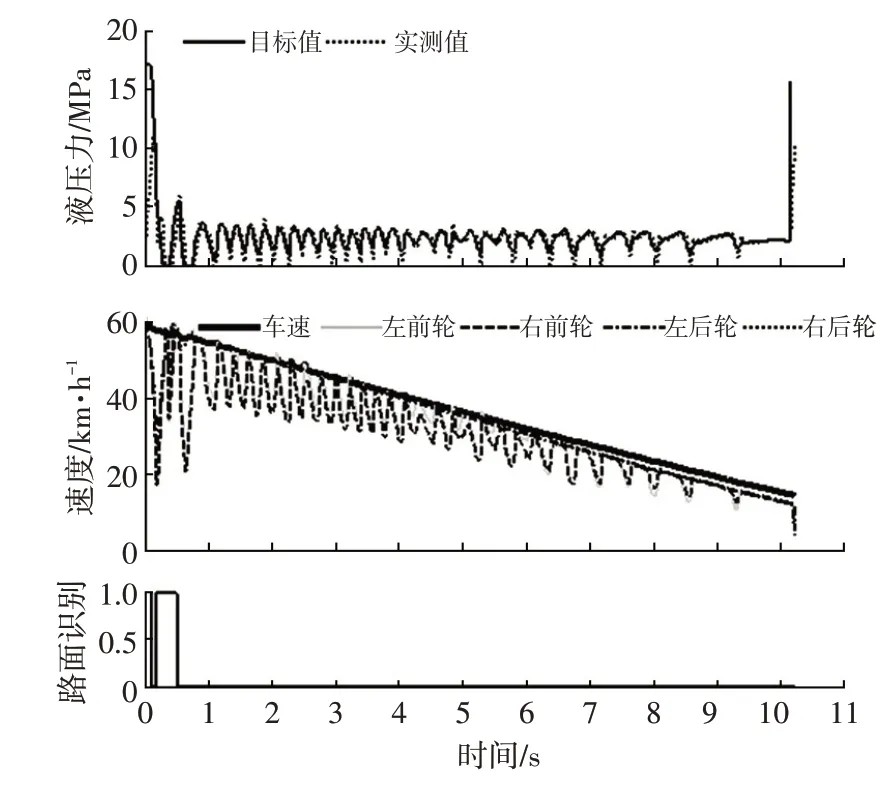
圖11 臺架試驗對開路面制動情況

圖12 實車試驗場景
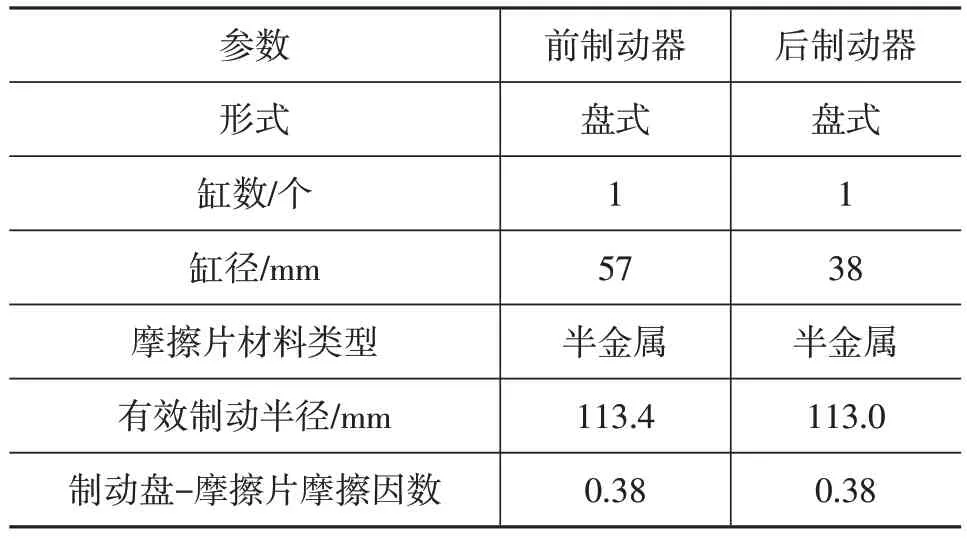
表3 試驗車輛制動器參數
試驗工況為:將原車ABS 控制器電源斷開使其失效,駕駛員盡可能操作轉向盤使車輛保持直行,車輛加速至60 km/h 左右時,駕駛員猛踩制動踏板并盡量保持在踏板最大開度處,觀察車輛制動過程。
4.2.1 高附路面實車試驗
由圖13a 可以看出,由于I-EHB 系統的遲滯,實際液壓力對期望液壓力的跟蹤有0.05 s 左右的延遲。由圖13b看出,基于主缸液壓力控制的防抱死冗余控制系統可以有效防止車輪抱死,且圖13c所示的滑移率在最佳滑移率(0.2)附近波動。2.5 s 之后,車速低于防抱死法規中規定的車速15 km/h,允許車輪抱死,算法退出。在ABS 冗余介入過程中,平均制動減速度為6.26 m/s2,附著系數利用率為75.15%,可以達到防抱死法規中對常規ABS附著系數利用率大于75%的規定[12]。
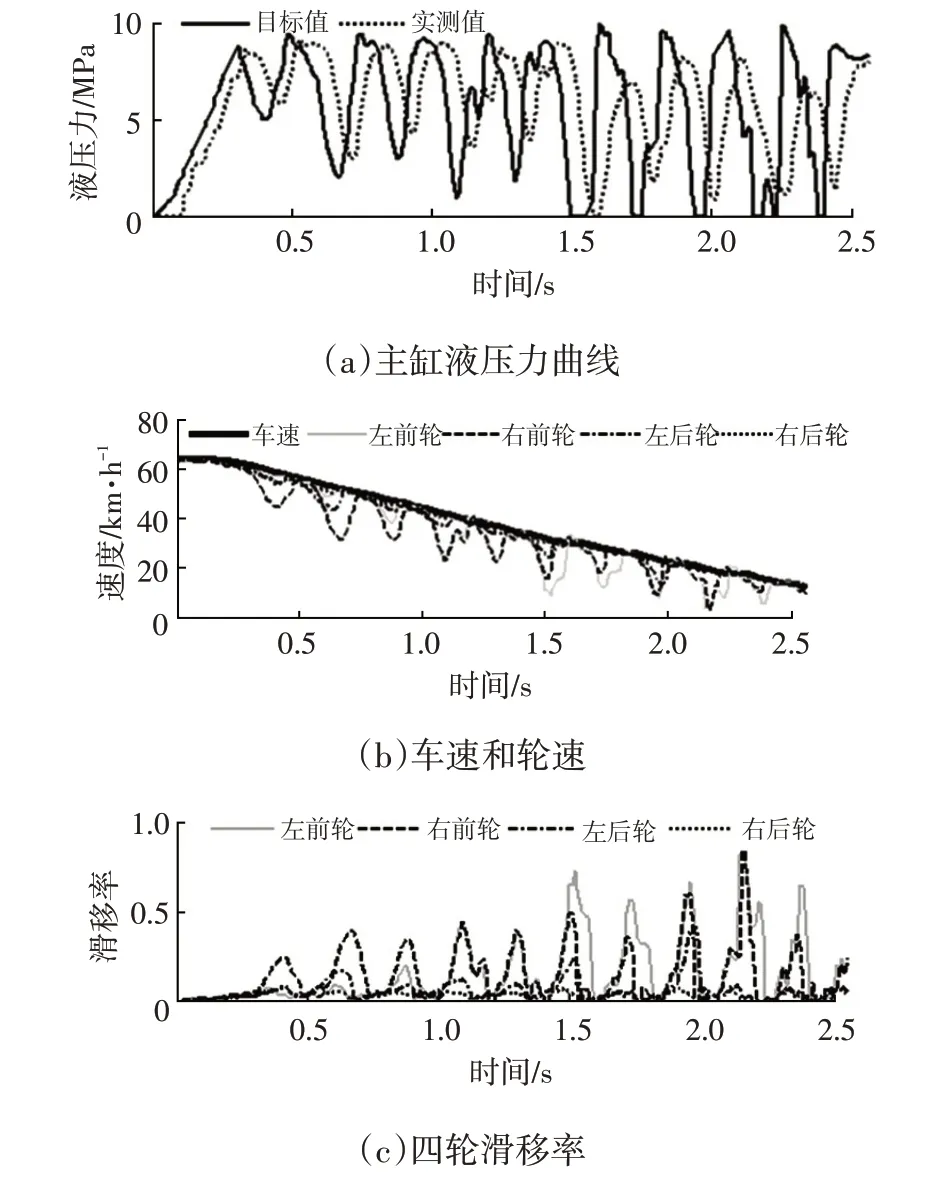
圖13 實車試驗高附路面制動情況
4.2.2 低附路面實車試驗
由圖14 可以看出,在防抱死冗余系統的控制下,4個車輪皆不會抱死,且在四輪低選策略下,每一時刻四輪滑移率中的最大值均保持在最佳滑移率附近。在制動時間為4.4 s 時,車速低于15 km/h,允許車輪抱死,算法退出。ABS冗余算法介入過程中,平均制動減速度為2.86 m/s2,附著系數利用率為83.42%,同樣滿足制動法規相關規定。
以上試驗結果表明,針對I-EHB 系統開發的防抱死制動冗余算法能夠很好地實現制動過程中車輛防抱死,且對路面有自適應性。
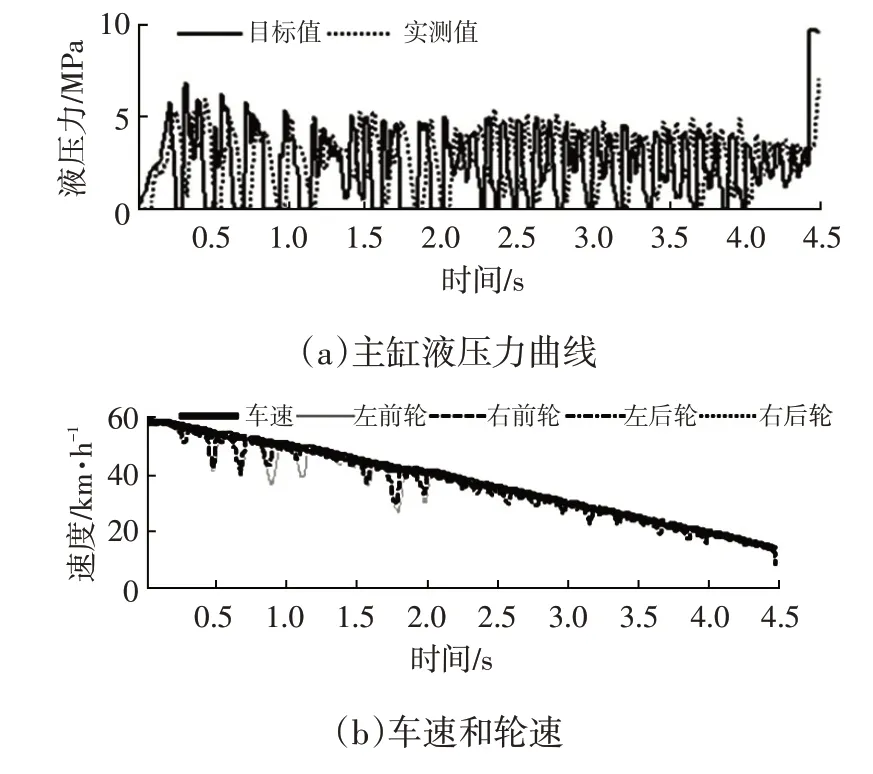
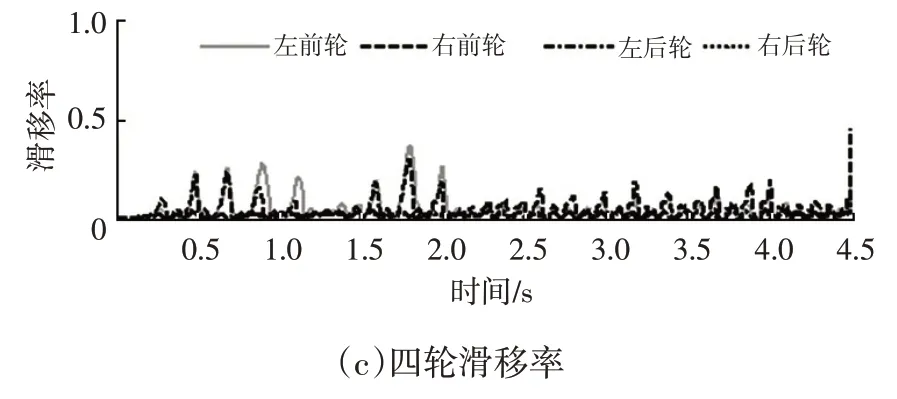
圖14 實車試驗低附路面制動情況
4.2.3 與原ABS的試驗對比
為進一步驗證本文所設計的防抱死冗余系統的效果,將其與原車搭載的ABS進行對比,保持原車ABS功能,在前文所述高、低附路面上重新進行制動防抱死試驗,結果如表4和表5所示。可以看出,基于主缸液壓力控制的防抱死冗余控制系統能夠部分實現原車ABS 防抱死制動的功能:高附路面下受限于四輪低選策略的影響,路面附著系數利用率略低于原車ABS;低附路面下制動效果與原車ABS基本持平。試驗結果表明,作為冗余備份系統,本文所設計的基于I-EHB 系統主缸液壓力控制的防抱死制動系統可以滿足功能要求。
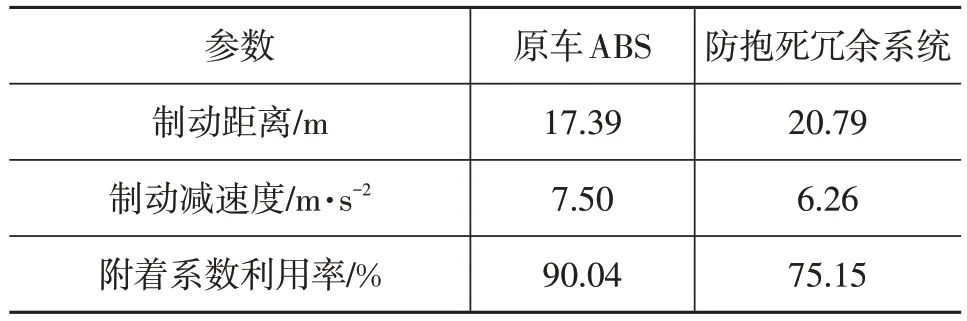
表4 高附路面下原車ABS與防抱死冗余系統對比
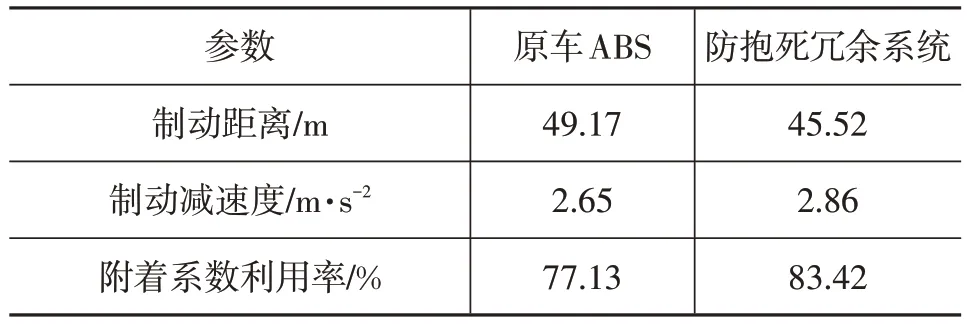
表5 低附路面下原車ABS與防抱死冗余系統對比
5 結束語
本文提出一種在常規ABS 失效條件下,利用IEHB系統主動調節主缸液壓力以實現車輪防抱死的控制算法。通過硬件在環試驗和實車試驗,驗證了該算法的有效性,其能夠大幅提升車輛的制動穩定性和安全性,且無需額外硬件。以本文所設計的防抱死冗余控制系統為基礎,進一步研究的方向包括:提升控制系統對路面條件的自適應性,結合更完善成熟的路面識別算法以最大限度利用路面附著條件;深入考慮液壓力響應的非線性以及摩擦片溫升等因素的影響,提升滑移率控制的精度。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
