機器人設計與實現
2021-05-14 15:53:27楊晴
錦繡·上旬刊 2021年6期
關鍵詞:信號
楊晴


機器人研究已進入智能化階段,本文從研究應用的角度出發,通過以PC+運動控制卡為核心,搭建機器人的控制系統平臺,在VC++平臺下編寫控制程序,設計出機器人。
1 機器人硬件設計
1.1 機器人本體
機器人的本體樣機如圖1所示,該機器人主要由固定基座、腰座、腰部、大臂、小臂和手腕組成。腰部機構與基座固定連接,腰部支撐大臂,大臂連接小臂,最終構成了機器人。
機器人的每個關機都是由RV減速機、伺服電機等部件組成,當電機轉動時,RV減速機以一定的傳動比帶動部件旋轉,由此產生相對運動。各個關節的減速比分別為1:58、1:121、1:121、1:45、1:75和1:75。大臂和小臂在豎直面內做俯仰的位置運動,手腕部分三個關節分別作橫滾、俯仰和偏轉等位姿運動。
1.2 機器人控制系統的硬件組成
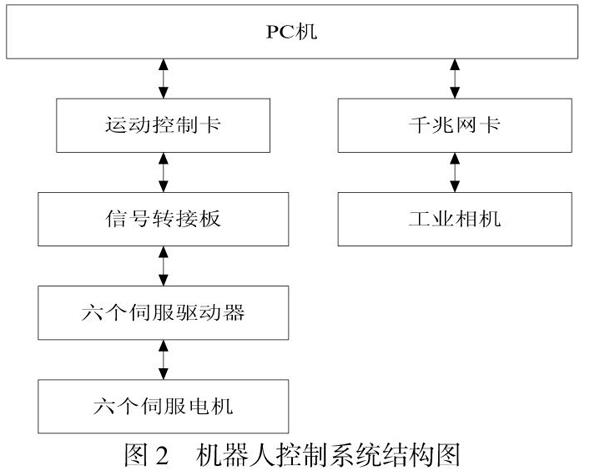
機器人控制系統采用PC機+運動控制卡開放式控制系統平臺,上位機由PC機(Windows XP操作系統平臺)組成、下位機由阿爾泰PCI1040運動控制卡構成,采用三洋交流伺服驅動器和伺服電機,以及信號轉接板和其他一些控制電路。視覺系統通過德國MTec公司的Halcon軟件進行開發,硬件部分采用德國的Balser型號為acA250014gm的工業相機和日本的camputer鏡頭,通過千兆網卡與PC機進行通訊。其控制系統硬件結構如圖2所示。
1.3 控制系統的控制線路設計
機器人系統的電路部分,主要由主電路、控制信號接口電路(通過轉接板連接)、通訊電路、機器人本體與控制實驗臺接口電路、限位開關電路以及其它輔助部分組成,通過對以上電路模塊的設計,搭建了該機器人控制實驗平臺如圖3所示。
為了能使機器人具有模塊化功能,對六個伺服電路進行模塊化設計,獨立控制六個伺服系統的供電,達到既能單獨控制某個關節又能幾個關節一起聯動,其中一個伺服電路如圖4所示。
機器人6個伺服系統的控制方式都選用位置控制方式,控制器通過轉接板給交流伺服驅動器發送使能、位置、速度等指令,并采集伺服驅動器的監視報警等信號。分揀機器人第一關節伺服驅動器CN1接口與控制器轉接板J1接口的控制信號接線如圖5所示。
為方便機器人每個關節的伺服驅動器與控制器之間信號的發送與接收,利用Altium Designer Summer 09軟件設計了控制信號轉接電路板,如圖6所示。
參考文獻
[1]楊小亭,曹義東,宋科. 基于六自由度關節機器人的一種計算機控制系統[J]. 微電子學與計算機,2012,07:192-196.
[2] 北京阿爾泰科技發展有限公司. PCI1040運動控制卡硬件使用說明書.
[3] 孫鑫,余安萍. VC++深入詳解[M]. 北京:電子工業出版社,2006.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06