波浪滑翔器聲學應用分析
2021-05-10 07:47:18楊志國劉保華董武文
聲學技術 2021年2期
關鍵詞:信號
楊志國,姜 瑩,劉保華,宗 樂,顏 曦,董武文
(1. 國家深海基地管理中心,山東青島,266237;2. 自然資源部第一海洋研究所,山東青島266061;3. 青島海洋科學與技術試點國家實驗室,山東青島266237;4. 杭州銳訊科技有限公司,浙江杭州310000)
0 引 言
近年來,隨著海洋技術的不斷發展,海洋無人自主移動平臺取得了顯著的進步,比較典型的有自主水下航行器(Autonomous Underwater Vehicle,AUV)、水下滑翔機(Underwater Glider)和波浪滑翔器(Wave Glider)。這三種平臺搭載聲學設備進行水下目標監測與探測已經有了比較多的應用[1-3]。通常,自主水下航行器具備推進系統,機動能力強,搭載導航設備后軌跡控制精度高,可搭載聲學測繪、探測等設備進行水下地形、地貌掃測以及海底掩埋目標探測等,但是受能量限制無法長時間運行。水下滑翔機通過改變油囊排水量實現上浮與下潛,通過改變翼板的姿態調整前進方向。由于水下滑翔機通常不開啟螺旋槳推進系統,其軌跡控制精度較差,但系統功耗低,可以在海洋中長時間生存,適合搭載聲學記錄儀、聲學目標監測系統等對海洋環境噪聲進行長期觀測以及水下目標探測。波浪滑翔器是一型利用其特殊雙體結構轉換波浪起伏為前向動力的無人自主水面船,而且水面船體安裝有太陽能電池板,可以利用太陽能發電。波浪滑翔器具有自動導航、位置保持和衛通監控等功能,該平臺搭載衛星通信模塊,可以實現與岸站實時通信,同時可以為負載提供持續的電源供給,適合搭載聲學檢測系統開展水下目標長期在線監測。多套搭載聲學檢測設備的波浪滑翔器利用衛星通信等無線遠距離通信模塊可以實現組網運行,從而可以組成大規模接收陣列提高水下目標檢測的幾率。
不同的平臺由于自身機械結構以及控制系統的不同,呈現的平臺噪聲特性也不同,本文針對波浪滑翔器搭載聲學設備開展聲學應用的需求設計了波浪滑翔器平臺聲學特性分析試驗,通過搭載自容式聲學記錄儀測量波浪滑翔器平臺噪聲,在青島近海開展了海上試驗。根據海上試驗數據對平臺噪聲進行了分析,給出了平臺噪聲特性以及平臺優化建議。在此基礎上,設計了波浪滑翔器搭載聲學負載的拖曳結構。
1 波浪滑翔器聲學應用
1.1 波浪滑翔器組成與工作原理
波浪滑翔器是近年來海洋環境監測技術領域出現的新型海洋自主觀測平臺。該平臺完全利用環境能源,可以在廣闊的海洋上進行長期的路徑跟蹤和位置保持,并通過衛星通訊將搭載傳感器測量的環境數據實時傳達給監控基站,基站可視化顯示平臺狀態和測量數據,并可基于矢量地圖完成平臺的路徑規劃等。
波浪滑翔器包括水面船體和水下牽引機,二者通過 4~7 m柔性吊纜連接。主控系統安裝在水面船體中,太陽能電池板和通訊導航設備安裝在水面船體上;水下牽引機由主框架和水翼組成,其尾部設置有舵機轉向機構,結構組成如圖1所示。
波浪滑翔器在海洋表面與起伏波浪相互作用而實現前向運動,整個過程中柔性通訊纜與系帶纜時而張緊、時而松弛。水面船體隨著波浪升高時柔性纜張緊,水下牽引機在水面船的拉升力作用下向上并向前產生位移;水面船體隨波浪下降時柔性纜松弛,水下牽引機在自身重力作用下下潛,在翼板的推動下向前滑翔[4]。波浪滑翔機運動過程如圖 2所示。
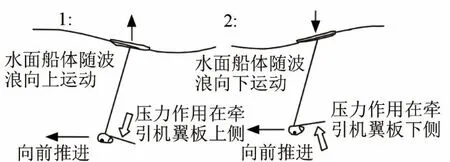
圖2 波浪滑翔機運動過程[4]Fig.2 The operational principles of wave glider[4]
本文選用“黑珍珠”小型波浪滑翔器搭載LoPAS自容式聲學記錄儀開展平臺噪聲分析和近海噪聲監測,該小型波浪滑翔器指標參數如表1所示。
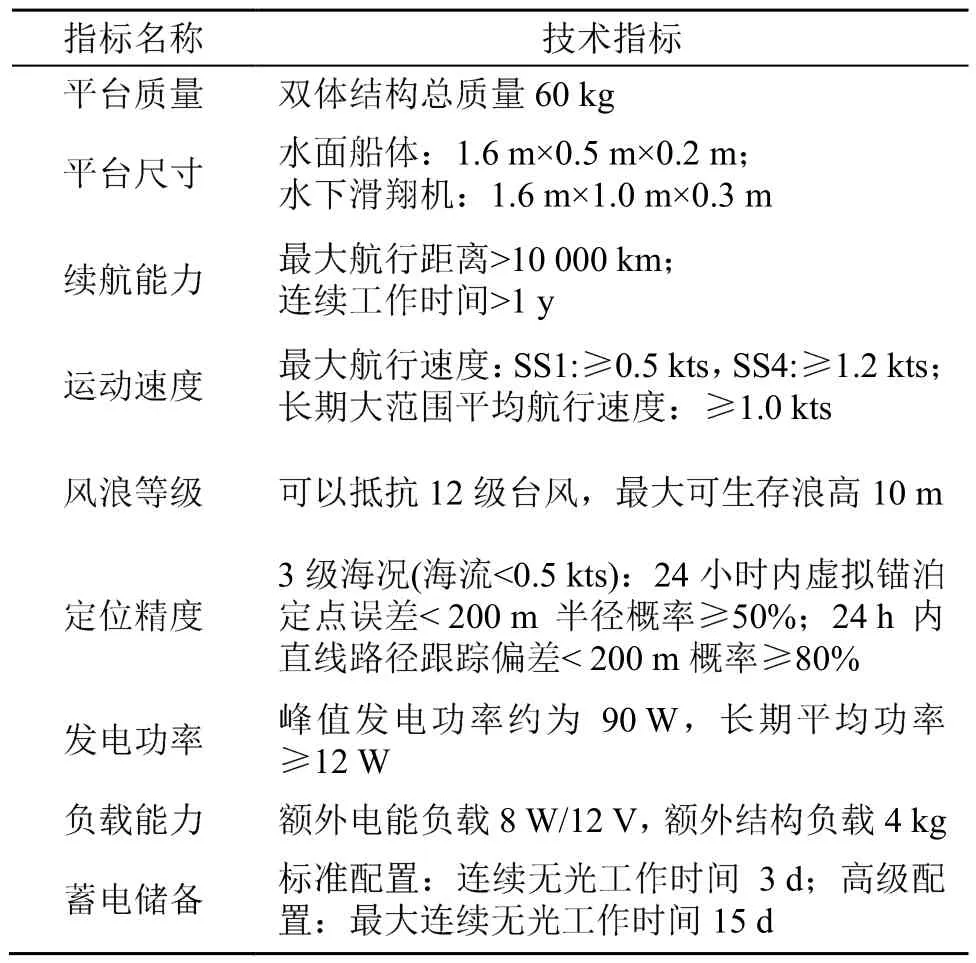
表1 “黑珍珠”小型波浪滑翔器指標參數Table 1“Black Pearl”wave glider specifications
1.2 噪聲測量設備
為評估波浪滑翔器搭載聲學系統的可行性,利用波浪滑翔器搭載 LoPAS低噪聲自容式水聽器進行平臺自噪聲測量。自容式聲學記錄儀參數如表 2所示。
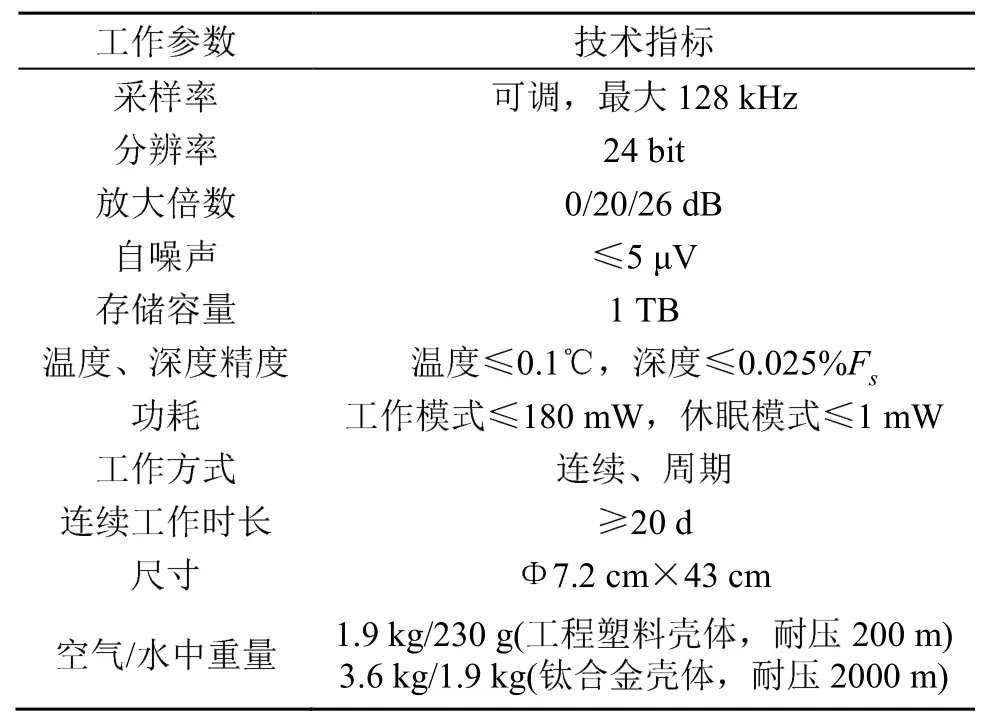
表2 自容式水聽器技術參數Table 2 Self-contained hydrophone specifications
在試驗前首先對自容式聲學記錄儀與水聽器進行了室內測試,自容式聲學記錄儀配置柱狀水聽器,水聽器靈敏度為(?200±2)dB re 1V/μPa(20~40 kHz)。利用圖3(a)所示真空罐對水聽器與記錄儀本底噪聲進行了測量。本底噪聲測量時首先將自容式聲學記錄儀與水聽器連接好后,配置好工作參數,然后將自容式聲學記錄儀與水聽器放置在真空罐內部支架上,保證水聽器與真空罐周圍無接觸,處于懸空狀態,避免低頻振動噪聲影響(此處為便于安裝,只將自容式水聽器電路部分與水聽器懸掛固定在真空罐內)。為了避免電磁干擾,將水聽器用錫箔紙包裹,處于全屏蔽狀態,如圖3(b)所示。安裝好后通過真空泵將真空罐內空氣抽出,真空泵可以達到的真空度相對壓力為?98 kPa,真空泵達到工作極限后自動停止,真空罐處于保壓狀態,此時達到中度真空。記錄保壓過程時間,測量完成后讀取保壓過程的數據作為測量結果。
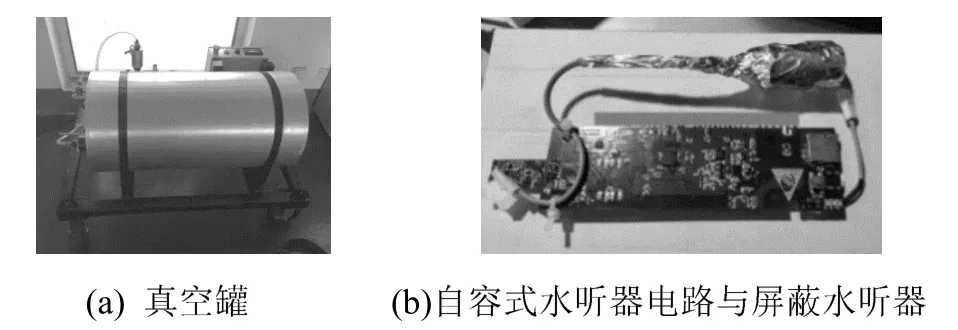
圖3 真空罐與自容式水聽器電路Fig.3 Vacuum container and circuit board of self-contained hydrophone
測量過程中聲學記錄儀相關參數設置如表3所示,真空罐測量獲得的設備本底噪聲與0級海況[5]對比曲線如圖4所示。從圖4中可以看出聲學記錄儀在測量頻帶內系統噪聲低于0級海況噪聲,在 10 kHz附近接近0級海況噪聲。

表3 聲學記錄儀工作參數配置Table 3 Configurations of self-contained hydrophone
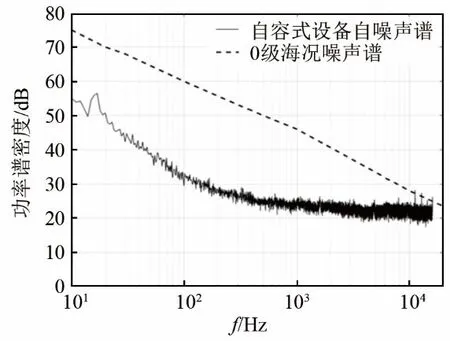
圖4 自容式水聽器的本底噪聲功率譜Fig.4 Background noise spectrum of self-contained hydrophone
1.3 拖曳試驗設計
為測量波浪滑翔器平臺噪聲,將自容式聲學記錄儀與水聽器放置在與波浪滑翔器水下牽引機同樣深度,由波浪滑翔器水面船體拖曳,拖曳結構如圖 5所示。自容式記錄儀與水聽器懸掛在浮體下5 m位置,通過配重保持垂直姿態,浮體位于水面船體后7 m距離,由水面船體拖曳前進。

圖5 拖曳試驗實施示意圖Fig.5 Schematic illustration of the towing experiment implementation
2 試驗數據分析
2.1 海上試驗
本次試驗海域為青島外海千里巖附近。2018年 8月 28日試驗船從嶗山仰口碼頭出發,到達60 km外的目標海域布放波浪滑翔器。波浪滑翔器的布放位置以及布放后狀態如圖6與圖7所示。
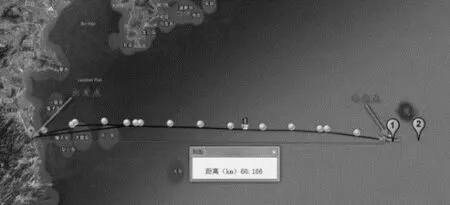
圖6 波浪滑翔器布放位置Fig.6 Deployed location of wave glider

圖7 波浪滑翔器布放后狀態Fig.7 Deployed wave glider
布放完成后,布放船離開測量海域,波浪滑翔器控制岸站通過監控系統監控并存儲銥星回傳的數據,分析平臺的運行狀態。通過銥星回傳的數據包括:電子羅盤數據、AirMAR氣象傳感器數據、溫鹽傳感器數據等。在整個試驗過程中實時檢測波浪滑翔器工作正常,試驗持續到2018年8月29日18:31,波浪滑翔器在千里巖東北側完成觀測任務。此次海試28 h累計航程為81.736 5 km。
2.2 數據分析
在波浪滑翔器布放、回收以及跟蹤監測狀態的過程中,布放船舶的噪聲較大。從8月29日11:48開始船舶噪聲消失,所測量信號為波浪滑翔器本體噪聲以及環境噪聲,有效數據到8月29日17:30,共342 min。
波浪滑翔器搭載的自容式聲學記錄儀采集的數據為原始數據,數據格式為*.bin。本文首先對數據進行了預處理與分類,將數據轉換為*.wav文件后,利用Adobe Audition軟件對數據進行回放,在回放過程中通過人耳鑒別結合信號時頻圖對信號進行初步分類,本文將采集到的信號分為四類:環境噪聲、平臺結構噪聲、水聽器安裝結構噪聲與動物聲信號。對分類后的信號利用Matlab軟件進一步詳細分析其功率譜密度以及時頻特性。分析功率譜密度時采用512點傅里葉變換,滑動窗口同樣為512點,50%重疊。計算時頻特性時根據時間和頻率分辨力折中調整短時傅里葉點數。
2.2.1 環境噪聲
本次試驗海域位于近海,試驗過程中記錄到的蝦類信號比較多,蝦類信號幾乎存在于整個觀測過程。在布放船舶離開波浪滑翔器后,等船舶發動機噪聲消失后,選取一段無明顯動物聲信號以及其他干擾的數據作為環境噪聲,計算觀測海域的環境噪聲功率譜密度。根據波浪滑翔器搭載的氣象觀測設備記錄,觀測期間風向集中于西南,風速均值為6.4 m·s-1,約為 3級海況。實測環境噪聲譜如圖 8所示,由圖8可見,中低頻噪聲較高,在300 Hz~2 kHz頻段范圍內存在一定的起伏,這個頻段主要包括風成噪聲等[5]。
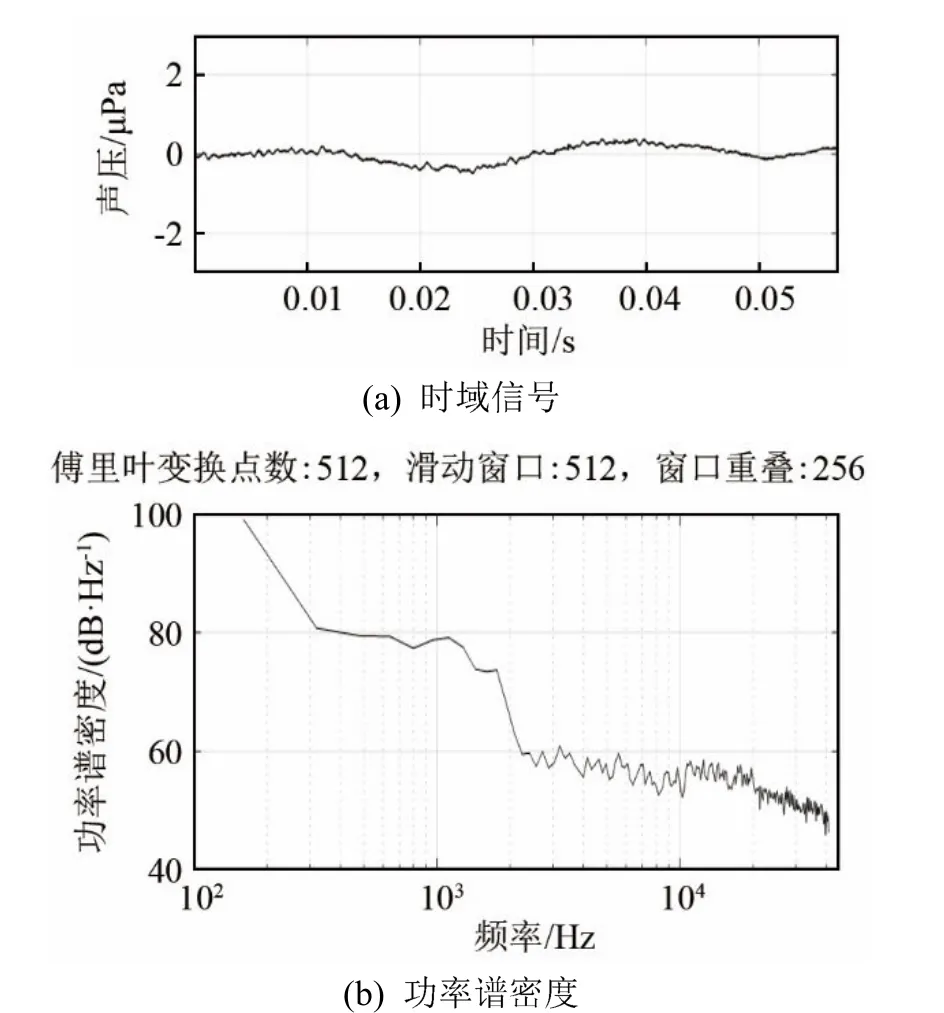
圖8 環境噪聲時域信號與功率譜密度Fig.8 Waveform and power spectrum of ambient noise
2.2.2 平臺結構噪聲
波浪滑翔器依靠水下牽引機隨波浪的起伏產生前進動力。水面船體隨著波浪升高時柔性纜張緊,水下牽引機在水面船的拉升力作用下向上并向前產生位移;水面船體隨波浪下降時柔性纜松弛,水下牽引機在自身重力作用下下潛,在翼板的推動下向前運動。翼板依靠彈簧實現回彈,翼板轉動結構如圖9所示。

圖9 翼板轉動結構Fig.9 Wing rotation structure of wave glider
在這一過程中彈簧存在拉伸與回彈過程,彈簧在這一過程中彈簧存在拉伸與回彈過程,彈簧的機械拉伸與回彈產生如圖10所示的寬帶噪聲,信號帶寬覆蓋2~40 kHz。通過在空氣中轉動翼板再讓翼板自由回彈,記錄這一過程產生的噪聲,對比發現空氣中翼板轉動偶爾產生的噪聲與水下記錄的此類噪聲存在類似的頻譜特征。
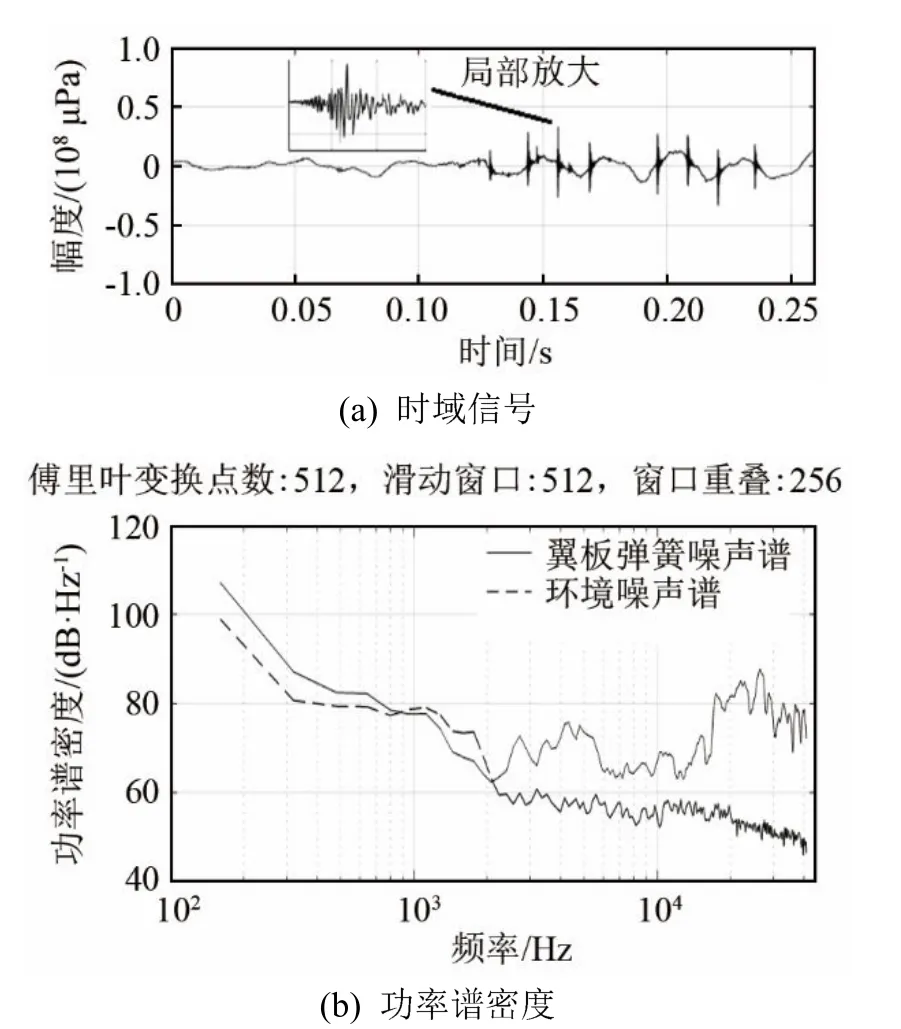
圖10 翼板轉動噪聲波形與功率譜Fig.10 Waveform and power spectrum of the noise caused by wing rotation
在水面船體上下起伏的過程中,系帶纜會出現拉緊與松弛兩個過程。波浪滑翔器系帶纜外部為橡膠層,系帶纜與水面船體以及水下牽引機連接部分采用金屬部件,如圖 11所示。系帶纜與金屬結構在拉緊以及轉動過程中會產生類似“門軸轉動”的噪聲,噪聲在時頻譜上表現為“上掃頻”以及“下掃頻”,存在明顯諧波結構,如圖12所示。
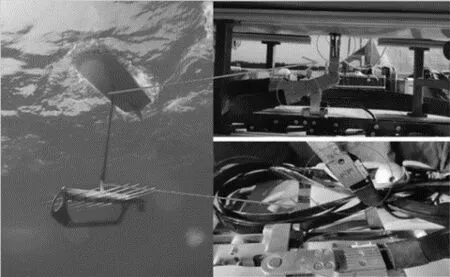
圖11 橡膠系帶纜與船體及水下牽引機的連接Fig.11 Connection of ribbon cable to hull and underwater tractor
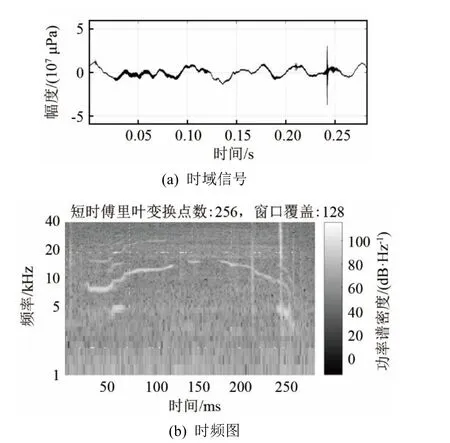
圖12 系帶纜拉扯信號與時頻圖Fig.12 Waveform and spectrogram of the noise caused by ribbon cable stretching
2.2.3 水聽器安裝噪聲
水聽器在水下受水流沖擊會引起振蕩,引入噪聲。目前,國內應用較為廣泛的減震做法是采用如圖 13所示的框架加彈簧的結構安裝水聽器,外部再采用絨布等棉質或絲質布料覆蓋,從而達到降低流噪聲以及減震的作用。但是,波浪滑翔器搭載采用這種結構安裝的水聽器時,水聽器會隨著水面浮體上下起伏而一起起伏,在這一過程中當框架受到沖擊的時候彈簧會出現持續高頻震蕩與低頻震蕩。高頻震蕩時彈簧會產生寬帶噪聲,如圖 14所示。高頻噪聲覆蓋整個頻帶,高頻震蕩多出現在水聽器受到縱向沖擊時;低頻震蕩主要由水聽器受到橫向震蕩引起,震蕩時間持續較長,能量主要集中在1 kHz以內,如圖15所示。
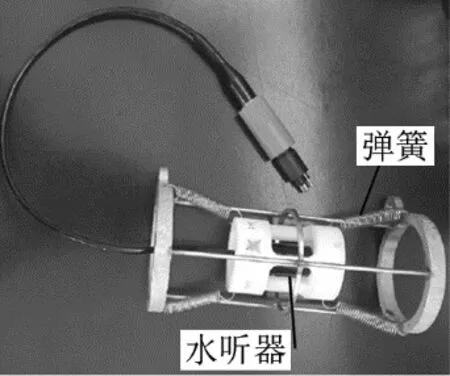
圖13 水聽器安裝結構Fig.13 Installation frame of hydrophone
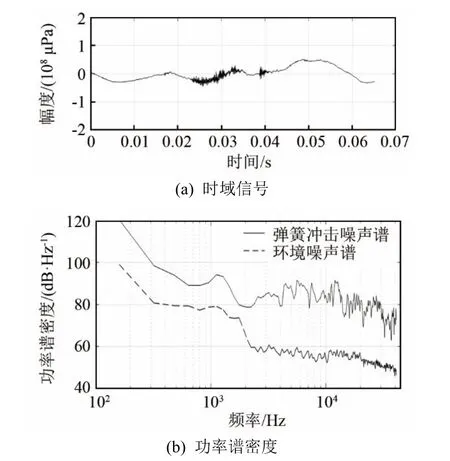
圖14 彈簧被縱向沖擊產生的噪聲波形與功率譜Fig.14 Waveform and power spectrum of the noise caused by hitting frame vertically
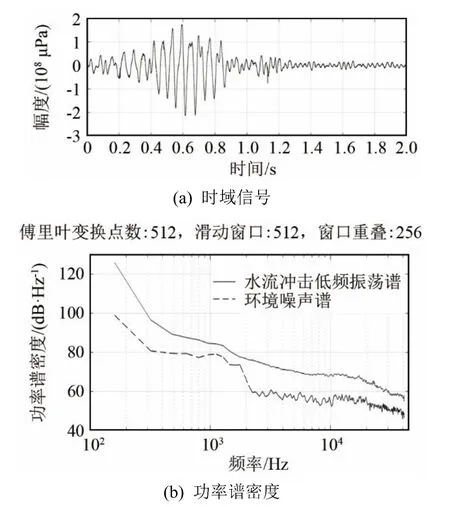
圖15 水流等引起的噪聲波形與功率譜Fig.15 Waveform and power spectrum of the noise caused by water flow
2.2.4 動物聲信號
選取一段明顯的蝦類信號,如圖 16所示,大部分蝦類信號后約 5~8 ms均伴隨著另外一個信號。結合圖5所示拖曳結構,水聽器位于水面以下5 m 左右,隨波浪以及拖曳存在一定起伏,信號從不同角度到達水聽器后再經過水面反射回到水聽器,與信號到達時間差吻合。此外,伴隨信號相位與直達信號相反,因此判定伴隨信號為水面反射信號。對信號功率譜分析如圖 16所示,蝦類信號為寬帶信號,在2~30 kHz均存在較強的能量,不同地區的蝦類信號存在一定差異[6]。
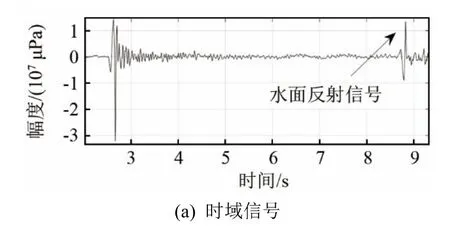
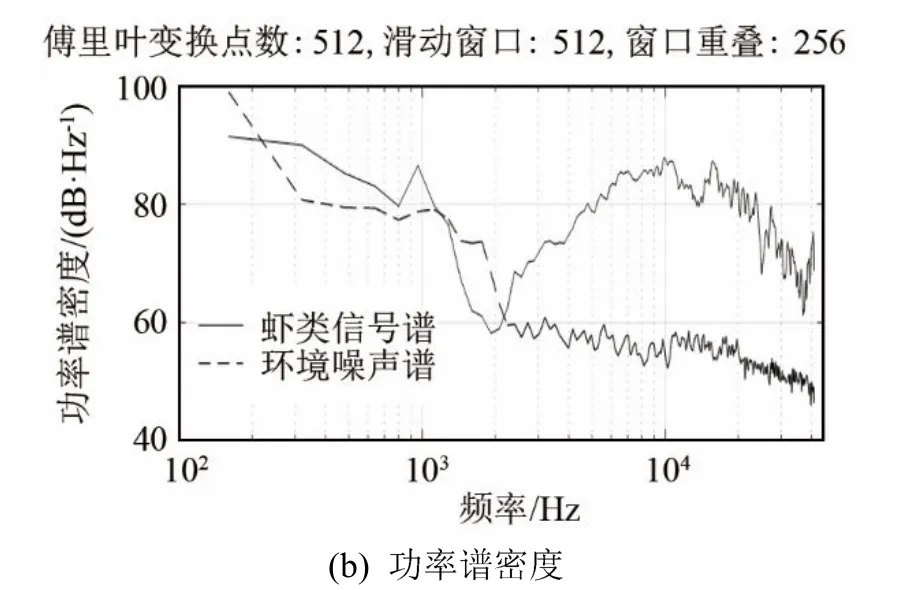
圖16 蝦類的噪聲信號與功率譜Fig.16 Waveform and power spectrum of shrimp noise
在試驗過程中記錄到部分哺乳動物聲信號,由于蝦類信號的存在以及采樣頻率的限制導致哺乳動物的click信號較難分辨;而whistle結構較為清晰,在一定的背景干擾下仍然可以分辨。部分疑似海洋哺乳動物whistle信號如圖17所示,包括中高頻諧波結構的信號,高頻上掃頻和下掃頻以及“V”型結構信號。公開資料顯示,近年來我國沒有在青島近海開展過哺乳動物生態現狀調查。早期文獻顯示,在青島近海可能存在瓶鼻海豚(Tursiopstruncatus)、偽虎鯨(Pseudorcacrassidens)、虎鯨(Orcinus orca)、江豚(Neophocaenaphocaenoides)、抹香鯨(Physetermacrocephalus)、侏儒抹香鯨(Kogiasima)、柏氏中喙鯨(Mesoplodondensirostris)[7]。由于在試驗過程中僅采用了自容式聲學設備記錄,波浪滑翔器工作時間段內沒有視頻記錄數據,通過對試驗數據分析并與文獻結果對比,初步推測中頻whistle信號可能為偽虎鯨信號,偽虎鯨whistle信號主要能量集中在4~6 kHz之間[8],與本次試驗觀測結果接近。進一步識別更多海洋哺乳動物信號需要進一步開展視頻和音頻同步觀測,獲取更多數據。
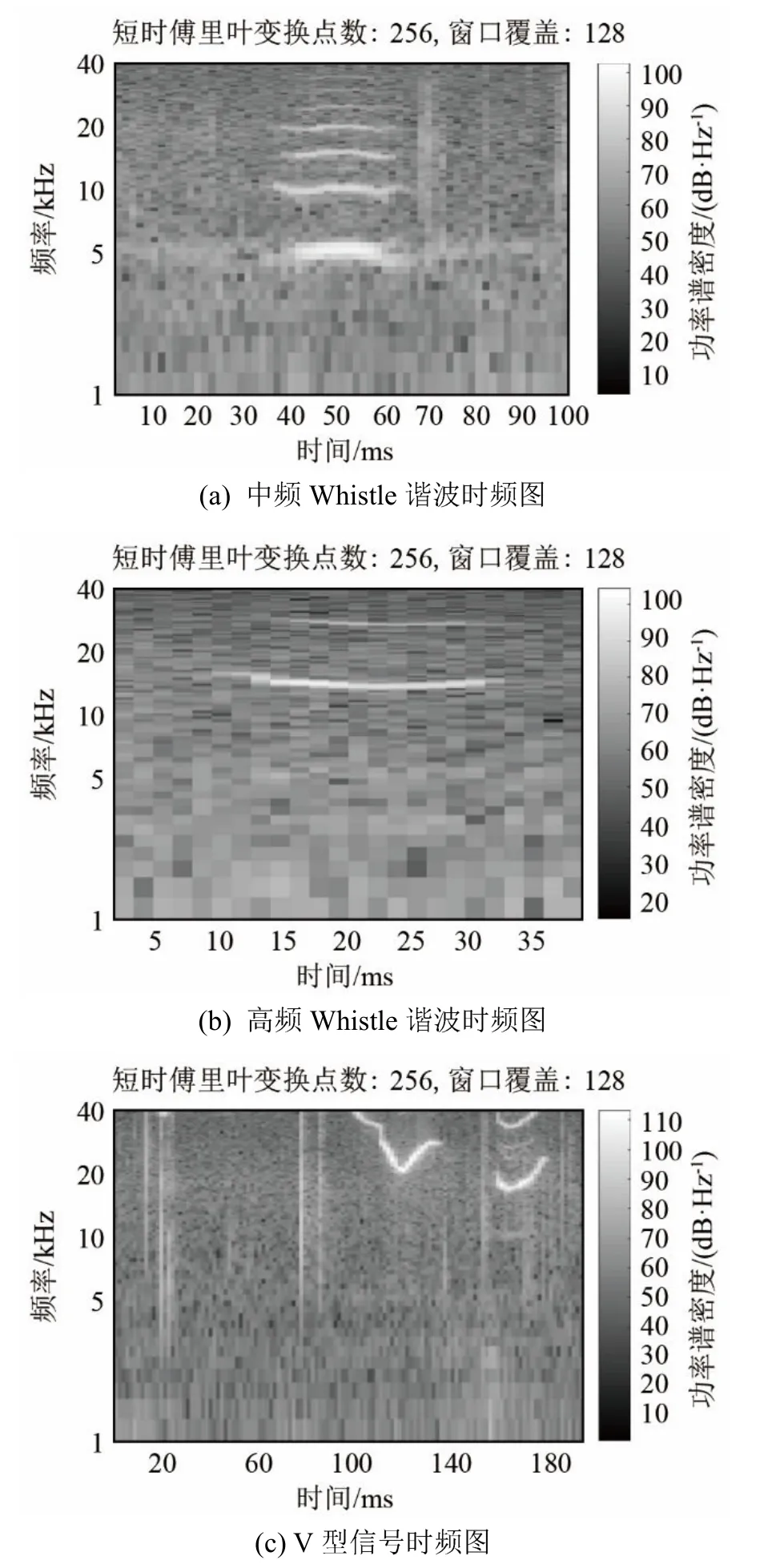
圖17 可疑海洋哺乳動物聲信號時頻圖Fig.17 Spectrograms of some potential marine mammal signals
2.3 機械噪聲消除及聲學負載拖曳方案
根據試驗結果需要對波浪滑翔器本體噪聲進行控制,包括優化翼板彈簧結構、改進系帶纜與水面船體以及水下牽引機連接處之間的結構。對于聲學負載而言,將圖 14所示水聽器固定結構中的彈簧改為耐腐蝕橡膠,消除彈簧共振引起的噪聲,如圖18所示。

圖18 水聽器隔振安裝結構Fig.18 Installation of hydrophone: a protective cage with suspension
此外,聲學拖曳負載拖曳方式需要采用多級緩沖結構,如圖19所示,拖曳負載通過配置合適的浮子與重塊保持零浮力,與水下牽引機之間采用由重塊與浮子組成的多級橫向“S”型結構緩沖。緩沖結構可以有效消除波浪滑翔器前進過程的不連續導致的低頻拖曳振動噪聲。
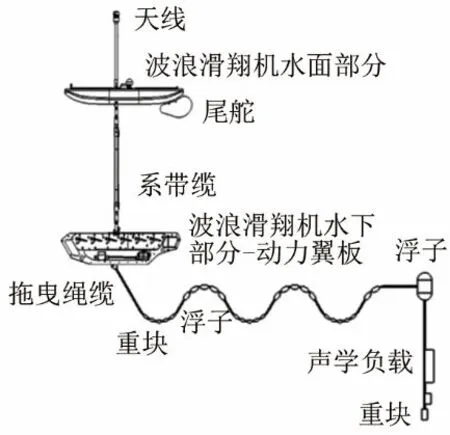
圖19 聲學負載拖曳示意圖Fig.19 Towing structure for acoustic payload
根據圖11與圖13所示,目前平臺彈簧噪聲與系帶纜拉扯產生的噪聲譜比環境噪聲譜高出最多33 dB。此處僅考慮傳播損失因素,不考慮吸收因素,按照球面波擴展計算,采用目前平臺在近海開展水下目標檢測時聲學負載拖曳距離至少需遠離翼板50 m以上,才可以保證不受平臺噪聲影響。
3 結 論
波浪滑翔器作為一種新型海洋無人自主航行器,與AUV以及水下滑翔機相比有其獨特的優勢。波浪滑翔器不受能源限制,通過利用波浪能源與太陽能搭載觀測設備實現長期觀測。本文利用波浪滑翔機搭載低噪聲自容式水聽器對波浪滑翔機本體噪聲進行了評估,分析了波浪滑翔器本體噪聲以及水聽器安裝引入的噪聲產生機制,并提出了改進方案;試驗過程中記錄到蝦類與海洋哺乳動物信號,驗證了波浪滑翔機搭載聲學設備開展聲學觀測的可行性。結合波浪滑翔器跨界面自主運行的優勢,可以通過衛星通信或其他遠距離無線通信方式將水下觀測或探測結果實時傳回到遠距離陸基或船基控制平臺,再配合同步數據采集可實現水下、水面多節點實時組網。此外,波浪滑翔器具備航跡規劃能力,具備一定的航跡控制精度,搭載聲學探測裝備的波浪滑翔器在海上可以按照預定軌跡在海上組成一定的陣型,從而可以提高水下目標檢測能力,可以用于水下發聲目標實時監測、探測等。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06