基于多光譜的地面傷員識別技術實驗研究
2021-05-08 06:23:50朱明明夏娟娟張林媛王健琪路國華
醫療衛生裝備 2021年4期
朱明明,雷 濤,夏娟娟,李 釗,張林媛,王健琪,路國華
(空軍軍醫大學軍事生物醫學工程學系,西安710032)
0 引言
目前國際形勢復雜多變,有戰爭就必定有傷員,而現代大規模殺傷性武器的使用更是導致傷員大量增加。傷員搜救是以人為本的重要體現,更是戰時戰斗力的重要保障[1]。研究表明,陸地各種傷員受傷后因未被及時發現而死亡的占死亡總數的76.2%,快速找到傷員,可使傷員死亡率降低2/3,在戰場傷員搜救中更是有“白金10 min,黃金1 h”的救治理念[2-4]。然而,通往搜救現場的道路通常已被毀壞,且存在環境復雜危險、搜索范圍大、人員分布不確定、人員特征不明顯等情況,加之救護人員數量有限,采用傳統的“一跟二看三問四聽五找”(搶救人員緊跟進攻部隊;注意觀察戰斗員狀態;詢問輕傷員,了解傷員分布情況;傾聽聯絡信號傷員呼救聲;按照作戰方向尋找傷員)已經無法快速并準確搜索到受傷人員。如何快速有效地搜尋傷員成為戰場傷員救治的首要問題,也是降低失蹤、死亡率的首要因素。
從技術發展特征和使用方式來看,傷員搜尋技術可分為約束式和無約束式。現有約束式救生裝備主要存在增加身體負荷、穿戴裝置使用不便及電磁兼容難以滿足武器裝備戰場環境要求等不足,對士兵戰斗力有所影響[5-7]。因此,未來傷員搜尋技術必將注重無約束式發展,利用人體生命特征進行搜索,從而減輕傷員負擔。目前,國內外無約束式搜尋技術主要采用無人機搭載RGB 高清相機和熱紅外成像儀進行低空搜尋[8-10],但在戰場環境戰士大多穿著迷彩服、處于偽裝條件下,依靠機載視覺載荷很難發現傷員。而熱紅外成像技術分辨力較差,受環境溫度影響較大,在戰場熱源較多、環境溫度大于30 ℃時,無法檢測到人體熱信號。多光譜目標識別技術具有抗偽裝、抗干擾、實時等優點[11],因而其在戰場傷員搜尋中具有獨特的優勢。
多光譜技術將成像信息從可見光(390~780 nm)范圍拓展到300~1 100 nm 波段,一般選擇其中4~10個特征光譜進行數據處理,通過目標與背景光譜特性曲線之間的差別,提取特征將目標識別出來[12]。小型無人機搭載多光譜相機進行低空巡航可實現小尺度高精度遙感監測,因此在農業、林業、生態環保等領域應用廣泛。其主要原理是根據植被中葉綠素、水分等含量不同影響冠層群體的反射光譜變化,從而反演出區域內植被的長勢、病蟲害、水分脅迫狀況[13]。目前,已有多款商用多光譜無人機用于農業和環境監察領域,例如大疆推出的精靈4 多光譜版和搭載Parrot sequoia 多光譜相機的Parrot bluegrass 無人機[14-15]。然而,此類應用都是大范圍區域化劃分,環境越復雜,目標區域越小,種間相似度越高,識別精度越低。將現有商用多光譜無人機用于偽裝于叢林中的迷彩服傷員搜尋,會因迷彩服與叢林的相似度較高,很難準確識別身著迷彩服的傷員。基于此,本文提出一種無人機搭載多光譜的地面傷員識別技術,以解決叢林中迷彩服傷員搜尋的難題。
1 材料與方法
1.1 材料
1.1.1 實驗設備
(1)ATP9100 便攜式地物光譜儀(奧譜天成)(以下簡稱“ATP9100”),波長范圍300~1 100 nm,CCD(charge-coupled device)探測器像素2 048,可測量輻照度、光譜強度、反射率、吸光度,光譜分辨力1.4 nm,波長精度0.5 nm,信噪比>800。使用ATP9100 分別對草地和迷彩服光譜強度、反射率信息進行多次檢測采集,分析其光譜特性曲線,選取特征波段。
(2)M100 四旋翼無人機(DJI Matrice 100)(以下簡稱“M100”),質量2 355 g,最大起飛質量3 600 g,可搭載有效載荷1 245 g;最大航行速度22 m/s,最大可承受風速10 m/s,懸停精度垂直方向0.5 m、水平方向2.5 m,最大通信距離5 km,負載1 kg 時可懸停13 min。M100 作為無人機遙感平臺的主體,主要負責搭載MS600 型通用多光譜相機(以下簡稱“MS600”)和大疆禪思Zenmuse X3 云臺相機(以下簡稱“X3”)獲取遙感影像,為后續圖像處理提供了可靠基礎。
(3)MS600,可實現6 個通道光譜圖像數據的同步獲取,質量僅170 g,包括相機主機、下行光傳感器(downwelling light sensor,DLS)、GPS 模塊,通過灰板輻射定標可獲得精確反射率數據。MS600 設計緊湊、體積小,采用標準化接口設計,便于與無人機快速集成。DLS 模塊可校正飛行過程中環境光的影響,為目標識別提供可靠數據。
(4)X3,Sony Exmor R CMOS 影像傳感器,尺寸為1/2.3 in(1 in=25.4 mm),焦距3.57 mm,像素4 096×2 160。X3 主要提供無人機飛行時的高空視野,方便更精準地獲取多光譜圖像信息,也可對目標區域進行可見光圖像拍攝,用于后期識別圖像與原始可見光圖像的對比。
1.1.2 實驗對象及環境
由于林地迷彩服與叢林環境相似度較高,與城市迷彩服和荒漠迷彩服相比較,其多光譜識別難度最大。因此,本研究選擇實驗對象為林地迷彩服,對其進行多光譜識別,實驗環境為草地環境(以馬蹄金等雜草為主)。
1.1.3 實驗設計
為方便數據采集、簡化實驗模型,實驗設定為草地環境下對林地迷彩服的識別,具體設計如圖1所示。首先,設定多光譜數據的采集條件,然后對識別目標和環境進行光譜強度和反射率數據采集,根據光譜曲線篩選特征譜段,再根據篩選的特征譜段選擇合適的多光譜相機。其次,根據選擇的多光譜相機搭建無人機多光譜遙感平臺,在飛行高度100 m時進行多光譜圖像采集,對采集圖像采用圖像配準、圖像拼接、輻射定標等方法,生成一張16 bit TIFF格式的六合一反射率數據全景圖。最后,將全景圖像嵌入目標識別模型,結合篩選的光譜指數和紋理特征構建決策樹算法,設置合理閾值,進行迷彩目標識別。
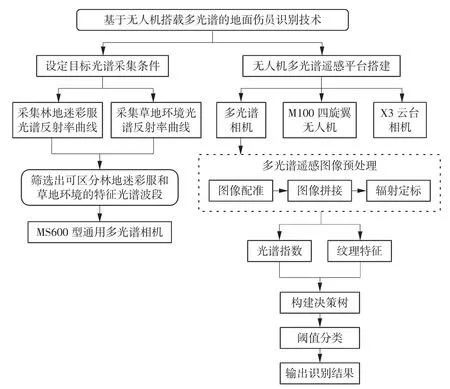
圖1 實驗設計示意圖
1.2 方法
1.2.1 數據采集條件設定
為保證實驗的嚴謹和測量的準確性,在光線較強時段(11:00—14:00)、高度50 cm、垂直方向進行數據采集,每組數據采集時間控制在10 min 以內。實驗中發現云層遮蔽等環境因素引起的光線變化對光譜強度影響較大,為減少天氣的影響,盡量選擇晴天無云的環境進行測量,每隔0.5 h 校對1 次暗電流和標定板參考光譜[16]。
1.2.2 多光譜遙感圖像采集
采集時間在11:00—14:00,天氣晴,微風。在學校足球場進行初步測試,測區面積為90 m×120 m,測區以黃綠相間草地為主,在草地上鋪設林地迷彩服偽裝成傷員。M100 飛行高度100 m,此時MS600 地面分辨力為6.25 cm,幅寬80 m×60 m。為方便拼接,采用自動捕獲模式,重疊率觸發,航向重疊度80%,旁向重疊度75%,MS600 捕獲圖像最快間隔為1.5 s,則M100 航行速度可設置為8 m/s,最快6 s 可完成圖像捕獲。在M100 高度100 m 處使用X3 對目標區域進行拍攝,分別用X3 和多光譜進行目標識別。
1.2.3 識別率測試
為了測量無人機搭載多光譜識別目標的識別率,本研究使用4 套林地迷彩服,根據不同面積分別模擬立姿(約0.1 m2)、坐姿(約0.2 m2)、側臥(約0.35 m2)、俯臥(約0.6 m2)4 種姿態。將這4 種姿態林地迷彩服放置在同一草地環境下,進行8 次多光譜遙感圖像采集,經圖像預處理后嵌入目標識別模型,統計實驗結果,計算識別率(模型識別出目標數與目標總數之比)。
1.2.4 數據處理
1.2.4.1 圖像配準
MS600 每次曝光可生成6 幅選定波段的單波段影像,此階段主要是將此6 幅單波段圖像合成1 個TIFF 格式的光譜強度數據文件,合成后每個像素點對應的是一串由6 個元素組成的光譜強度數組,為圖像拼接做準備。首先選擇5~10 組具有代表性的圖像,根據相機參數(像元大小、焦距、校驗模型Brown 等)完成內定向,此步驟可對獲取的多光譜影像進行降噪處理,檢驗圖像的完整性,并計算出每個像素點對應的GPS 坐標信息。然后進行空中三角測量自動轉點,選取特征點,在圖像拼接時將相鄰圖像間的特征點一一對應即可完成圖像拼接,匹配完成后,刪除粗差點。輸出虛擬相機參數(包含航高等信息),根據虛擬相機參數對多光譜影像中不同光譜通道的圖像進行圖像配準,生成六合一的TIFF 格式光譜強度_Multi 數據文件。
1.2.4.2 圖像拼接
使用無人機遙感技術進行傷員搜救具有低成本、高速、實時、易于獲取等優勢,但是由于無人機飛行高度低、攝像機視場角度小等原因,單幅圖像覆蓋面積小,需采集多幅圖像進行拼接,以獲取全景圖像。獲取全景圖像是為了更好地觀察傷員分布情況以及周圍環境情況,為決策者提供決策依據,方便組織救援力量及規劃救援路線。此外因為單幅圖像幅寬較小,相鄰2 幅圖像之間的重疊度約80%,如果對每單幅圖像進行逐一傳輸識別,會大大增加冗余度和計算量,且無人機遙感影像在運動中獲取,經過圖像拼接可糾正圖像中的模糊點。圖像配準完成后,同步進行空中三角測量和概略數字地表模型(digital surface model,DSM),完成從像空間坐標到物空間坐標點的轉換,根據數字正射影像的空間分辨力和格網間距完成圖像拼接。
1.2.4.3 輻射定標
對拼接后的單幅影像進行輻射定標,依次添加灰板原始圖像,通過輻射校正,將多光譜影像的灰度值轉換為目標區域的反射率,處理結束后生成16 bit TIFF 格式六合一反射率數據。
1.2.4.4 目標識別
將生成的16 bit TIFF 格式六合一反射率數據嵌入目標識別模型,進行自動化識別與定位。為克服單波段篩選的盲目性,可通過波段間運算構建敏感光譜指數,增強目標差異,最終構建模型進行目標提取。對不同波段的反射率賦予不同的加權值,突出地物之間的差異,根據公式計算形成光譜指數;利用基于灰度共生矩陣的紋理計算作為輔助手段,幫助剔除用反射率無法區分的特征,如形狀、紋理特征等[17-18]。以光譜指數、紋理特征等參數為子節點構建決策樹,設置合理閾值,完成目標識別。
2 結果
2.1 特征光譜波段篩選
林地迷彩服與草地環境光譜曲線如圖2 所示。
分析光譜反射率曲線可知,林地迷彩服在400~500 nm 波段與草地環境光譜曲線走勢一致,反射率較低且難以區分。550~560 nm 波段草地環境光譜曲線出現一個由葉綠素引起的反射峰,反射率遠大于林地迷彩服,可作為輔助識別的有效手段。660~690 nm波段草地環境對光的反射率較低,有一個吸收峰,林地迷彩服反射率較高。710 nm 處草地環境反射率急劇上升并迅速達到頂峰,出現高反射率平臺,此波段林地迷彩服與草地環境對比度高,特征明顯,可作為特征識別。通過以上分析及初步論證,選取波段為綠波段、紅波段、紅邊波段、近紅外波段,詳見表1,可識別出草地環境中的林地迷彩服。
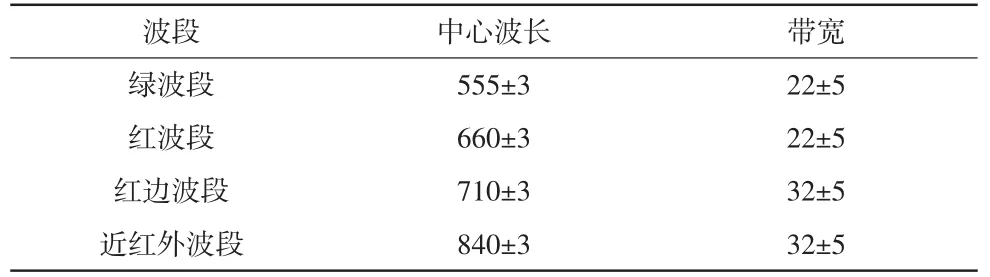
表1 擬選取林地迷彩服識別特征波段單位:nm
2.2 數據處理結果
2.2.1 可見光目標識別
無人機航高100 m 時,從X3 拍攝的目標區域圖像很難看出偽裝傷員,林地迷彩服在草地背景下的隱蔽性較好,目視識別效果不理想。經過圖像處理,調節對比度和亮度到最佳視覺效果,如圖3 所示,可看出迷彩服大致輪廓。
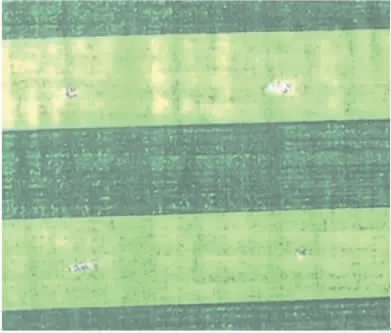
圖3 圖像處理后的X3 云臺相機拍攝影像
2.2.2 多光譜目標識別
無人機航高100 m 時,MS600 拍攝的目標識別結果如圖4 所示,圖中紅色十字標記處即為自動識別目標位置。每張圖片都自帶GPS 定位信息,標定位置為圖像的中心點GPS 位置,再根據地面分辨力每個像元的尺寸可算得每個像素點的GPS 定位信息。自動識別算法可有效提取迷彩偽裝人員所在位置,但存在少許識別誤差,當林地迷彩服面積≤0.1 m2時,多光譜無法識別林地迷彩服。進行8 次多光譜遙感圖像采集,經統計計算可得多光譜識別林地迷彩服的識別率為80%±6%(均值±標準差)。
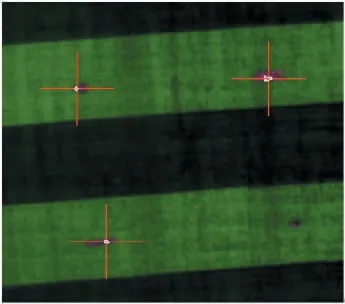
圖4 林地迷彩服的多光譜目標識別結果
3 討論
與現有傷員識別技術相比,本文提出的方法基于多光譜識別技術,可有效彌補戰場環境下可見光和紅外熱成像技術的不足。通過實驗分析找到合理的偽裝識別特征波段,結合篩選的指數和紋理特征,構建決策樹算法,設置合理閾值,進行迷彩目標識別,實驗結果表明該方法可有效識別草地環境下的林地迷彩服。經過查閱文獻,目前尚未發現利用多光譜識別傷員目標的類似研究,僅有針對偽裝網、營地等大目標進行反偽裝偵查的研究[11,19],而本文采用的多光譜識別技術可識別出0.2 m2小目標的偽裝傷員。
本文提出的識別方法雖能實現草地環境下林地迷彩服的識別,但識別率還有待提升。當林地迷彩服面積較小時,多光譜識別技術無法識別,分析可能由以下原因造成:(1)天氣復雜多變,天氣變化對光譜強度和反射率的影響較大。雖然已控制光譜數據采集和光譜遙感影像采集在晴天11:00—14:00 時間段,但每天的光線照度還是有所差別,后期將考慮采用相關環境補償算法。(2)測試背景與實驗背景草地環境的光譜曲線有所差異,為實驗結果帶來不確定性。此外,本次實驗為簡化實驗模型,方便數據采集,選用足球場作為實驗場地,但其背景單一,不能充分模擬戰場環境。在后續研究中,將逐步增加場地環境的復雜性,提高識別模型的可靠性。為了提升傷員識別的準確率,可采用亞像素級的算法細化圖像細節,進一步識別迷彩服上的血跡,還可定點拋投生物雷達模塊測量目標的心率、呼吸和體動數據,進行傷情感知[20-21],為戰場環境處于偽裝下的傷員的識別提供實驗基礎。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
