改進QGA算法在含分布式電源的配電網中故障定位應用與研究
2021-05-07 10:37:14宇衛,馬俊
電工材料 2021年2期
宇 衛,馬 俊
(1.湖北工業大學 太陽能高效利用及儲能運行控制湖北省重點實驗室,武漢 430068;2.國網電力科學研究院武漢南瑞有限責任公司,武漢 430068)
引言
近年來,隨著綠色發展理念的不斷深化,諸如風電、光伏等形式的分布式電源大量接入配電網,更多的簡單配電網絡變得復雜化,多電源和多方向潮流的輸入可能會增大原有的故障定位方法的誤差,嚴重時甚至會直接失效。在配電網接入更多分布式電源的復雜情況下,為保證供電可靠性和安全性,亟待研究一種高效且適用于含DG配網的故障定位方法。現階段,就配電網而言,故障定位主要有故障區段和故障測距兩種定位模式[1-3]。
本研究通過改進容錯能力較強的QGA算法,對含DG配電網進行故障區段定位,并利用算例驗證該算法的有效性。
1 DG對配電網故障區段定位的影響
1.1 分布式電源及其特點
分布式電源以其綠色環保、可持續發展、投資成本低、可就地消納以及對電網沖擊性小等優勢,近年來已經得到政策上的大力扶持。DG一般指的是小型發電機組,這類小型發電機組一般都小于30 MW,比如小型光伏發電、小型風電等。
1.2 DG對配電網故障區段定位方法的影響
圖1是簡單配電網的簡化模型,圖1中開關使用符號S1、S2、…、S6標明,而饋線段使用符號L1、L2、…、L6逐一標明。一般,配網在實際的運行過程中,FTU裝置可有效監測每一個開關處的電流指標。一旦有故障發生,與故障位置對應的FTU立即檢測到異常信號,并及時傳至下級系統,再由下級系統判定和分析確定故障位置。

圖1 簡單配電網
當DG并網后線路發生故障,此時,流向故障點的短路電流將主要由兩部分組成,其一是電源提供的電流,其二是包括DG的提供。另外,DG的接入位置不同,測得短路電流的差值也會隨之變化[4-6]。
2 基于QGA的改進算法
2.1 QGA算法及其不足
標準的QGA算法,是采用量子位和量子疊加態這兩種狀態的編碼方式充當種群個體,通過量子比特相位的旋轉進而實現種群的進化。
現成的QGA算法尚不滿足配網故障區段定位的快速性要求,另外在計算過程中,容易陷入局部最優。因此,需要對算法進行相應改進,使旋轉角的大小和方向在算法的迭代過程中自適應變化,并加入判據,判斷是否陷入局部最優。
2.2 QGA的改進方法
為了一定程度上提高算法的收斂速度,采用動態自適應模式旋轉角調整策略代替傳統QGA算法的固定旋轉角策略[7,8]。量子旋轉門的方向規定如下:
令α0、β0是為隨機一個量子位在此時的全局最優解的概率幅,令α1、β1為當前解中相對應的量子位的概率幅,記作:

旋轉角δ方向的選取方式如下:當δ≠0時,方向為-sgn(δ);當δ=0時,方向可正可負。
對于量子旋轉門大小,連續優化旋轉角可以通過梯度下降法予以實現,其中旋轉角步長與目標函數的變化率呈負相關。
為了有效地對局部最優情況進行判斷,引入離散度分析法分別從集中趨勢的角度和分散程度的角度兩個方面共同反映數據的變化以及走向。Vs為一開始初始種群全部個體適應度的離散系數,且Vs∈(0,Vsmax]。Vs的具體表達式如下:

式中,Vs為離散系數,S為第j代種群,個體目標值的均方差,為第j代種群,全部個體目標值的均值,fij為第j代種群,第i個個體的目標值,N為種群中的個體數。
種群中,可依靠混沌優化思想的序列搜索實現多樣性,以至于有效跳出局部最優[9-11]。改進后的QGA算法稱為IGQA算法[12],IGQA算法的具體流程如圖2所示。
3 IGQA算法在含DG配電網故障區段定位中的應用
利用含DG的IEEE69節點配電網模型[12],分別對發生單重故障和多重故障時的區段進行定位仿真。該仿真計算中的進化代數最大值為100,種群大小為80,并且采用相應改進措施,離散系統的區域閾值系數μ=0.03。
3.1 單重故障的仿真分析
以L9饋線單重故障為例,算法達到最優的迭代次數最少為58,最大值為71,平均迭代次數為67.81,目標值為0.5。圖3是L9饋線單重事故仿真結果。

圖3 L9饋線單重故障仿真結果
3.2 多重故障的仿真分析
以L20和L42饋線發生多重故障為例,算法達到最優的迭代次數最小值為64,最大值為74,平均迭代次數為68.52,目標值為2.0圖4是L20和L42饋線多重故障仿真結果。
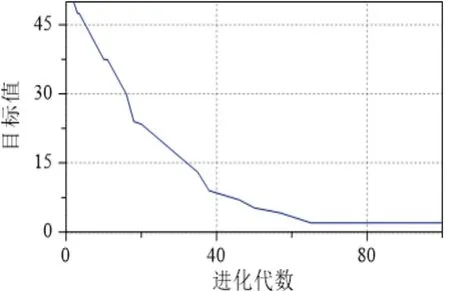
圖4 L20和L42饋線多重故障仿真結果
4 各算法的性能對比
將改進后的IQGA算法與標準QGA算法進行仿真對比,以檢驗改進后量子遺傳算法的優越性能,進化過程如圖5所示。從圖5中可以發現,在同樣的故障情況下,IQGA算法的收斂速度明顯比QGA算法的收斂速度快,IGQA算法在進化至45代左右時,達到最優解,且進化曲線波動幅度不大,比較穩定;而QGA算法在78代左右才尋到最優解,且算法波動幅度大,相對不太穩定。由此證明,改進的QGA算法比傳統的QGA算法在解決配電網故障區段定位問題的方面效果更好。
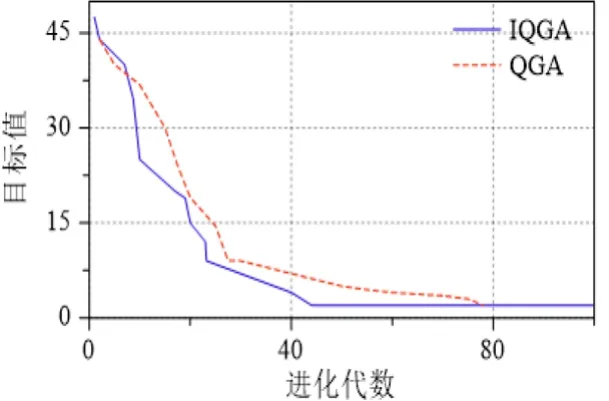
圖5 IQGA算法與標準QGA算法比較
5 結論
(1)IQGA算法改善了傳統QGA算法收斂速度慢的問題,并彌補了原算法容易陷入局部最優的缺陷;
(2)將IQGA算法應用到含DG配電網的故障區段定位中,能夠高效、可靠、準確、快速地尋找配網中的故障區段。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
經濟技術協作信息(2018年32期)2018-11-30 01:43:16
汽車維護與修理(2016年10期)2016-07-10 08:17:41
電子制作(2016年23期)2016-05-17 03:54:05
電測與儀表(2016年5期)2016-04-22 01:14:14
河南電力(2016年5期)2016-02-06 02:11:24
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
電測與儀表(2015年13期)2015-04-09 11:57:38