基于PCA-BLS的逆變器故障診斷
2021-04-29 04:36:24蘇家懿崔博文
集美大學學報(自然科學版) 2021年2期
蘇家懿,崔博文
(集美大學輪機工程學院,福建 廈門 361021)
0 引言
隨著電力電子技術的持續發展,逆變器供電的電動機驅動系統被廣泛應用于機器人、新能源汽車、高鐵、船舶、航空航天等各種工業系統中。在這些工業系統中,逆變器承擔著電能變換功能,對系統的正常運行起著關鍵作用。然而,逆變器中的開關器件極易發生開路或短路故障[1],開關器件發生故障會引起驅動系統無法正常工作,嚴重情況下會導致災難性事故發生。因此,為了提高電機驅動系統的可靠性,避免重大災難性事故發生,研究逆變器故障診斷就顯得十分必要。
逆變器中的開關器件發生故障后,其輸出的相電壓或電流波形會出現明顯的異常現象。文獻[2]利用仿真獲得了開關器件故障后的相電流及轉矩波形,通過與系統無故障狀態下的相電流和轉矩波形對比,實現了逆變器故障診斷。由于仿真難以完全模擬系統實際運行的各種工況,而系統在載荷突變或頻率改變時,通過波形對比更難以有效實現故障診斷。為克服這種現象,文獻[3]利用小波變換對逆變器輸出的相電壓信號進行處理,將得到的小波系數和小波能量作為故障特征,利用誤差后向傳遞神經網絡(back-propagation neural network,BPNN)實現故障診斷,但該方法計算所花費的時間過長,難以實現在線故障診斷。針對這種情況,文獻[4]對得到的小波系數和小波能量進行處理,獲得包含主要故障特征的特定低頻段信息,利用BP神經網絡實現故障診斷。文獻[5]利用小波包分析對逆變器輸出的相電壓波形進行處理,得到小波包分解后輸出電壓信號的細節,通過頻譜特征和功率譜識別逆變器故障,但是,在系統運行頻率改變時,逆變器輸出電壓信號頻譜特征會相應發生變化,該方法有可能會失效。文獻[6]利用小波包分析對逆變器輸出電壓信號進行處理,獲得小波能量作為故障特征,進一步利用主成分分析法對故障特征進行降維,利用降維后的故障特征構建故障向量,并以此訓練BP神經網絡,實現故障診斷。考慮到BP神經網絡存在局部收斂的問題,容易陷入局部極小點而無法得到全局最優解,研究者[7]進一步提出了更有效的寬度學習系統(broad learning system,BLS),與傳統的BP神經網絡分層網絡架構不同,BLS網絡是一種扁平式網絡架構,其計算高效、結構靈活,利用結構增量式學習算法,可有效降低訓練樣本數量,同時可有效減少訓練時間和訓練誤差[8-9]。
在現有研究基礎上,本文在MATLAB/Simulink環境下,建立逆變器供電的電動機驅動系統仿真模塊,利用主成分分析方法對逆變器輸出的三相電流信號進行處理,獲取逆變器故障特征,并分別利用BLS網絡和BP網絡對故障進行分類,研究結果驗證了本文研究方法的有效性。
1 逆變器故障模式

三相電壓型逆變電路驅動系統如圖1所示。其中:逆變器由6個開關器件V1、V2、…、V6構成;D1、D2、…、D6為與開關器件反并聯的二極管。通過控制逆變器中開關器件的通斷,就可以實現DC-AC變換。逆變器最容易發生的故障是開關器件短路和開路故障。短路故障是一種非常致命的故障,往往需要采取特殊保護措施。為避免短路故障發生,一般采取每個開關器件串聯一個熔斷器的措施來加以解決,如圖1所示,F1、F2、…、F6為與開關器件串聯的熔斷器。因此,短路故障就等同于開路故障。開路故障雖然不會導致系統停機,但如果任由開路故障發生而不去立即處理,就會引起逆變器或其他器件發生二次故障,最終導致系統停機[10]。因此,本文主要研究開關器件開路故障診斷,所考慮的開關器件開路故障指任意時刻有1個或2個開關器件發生開路故障。對于任意時刻1個開關器件發生故障情形,有6種故障模式,對于任意時刻2個開關器件發生故障情形,有15種故障模式。為便于研究,將無故障模式看作特殊故障模式,這樣,本文研究的故障模式總數就有22種。
為研究方便,特制定故障編碼,故障模式與故障編碼之間的關系如表1所示。
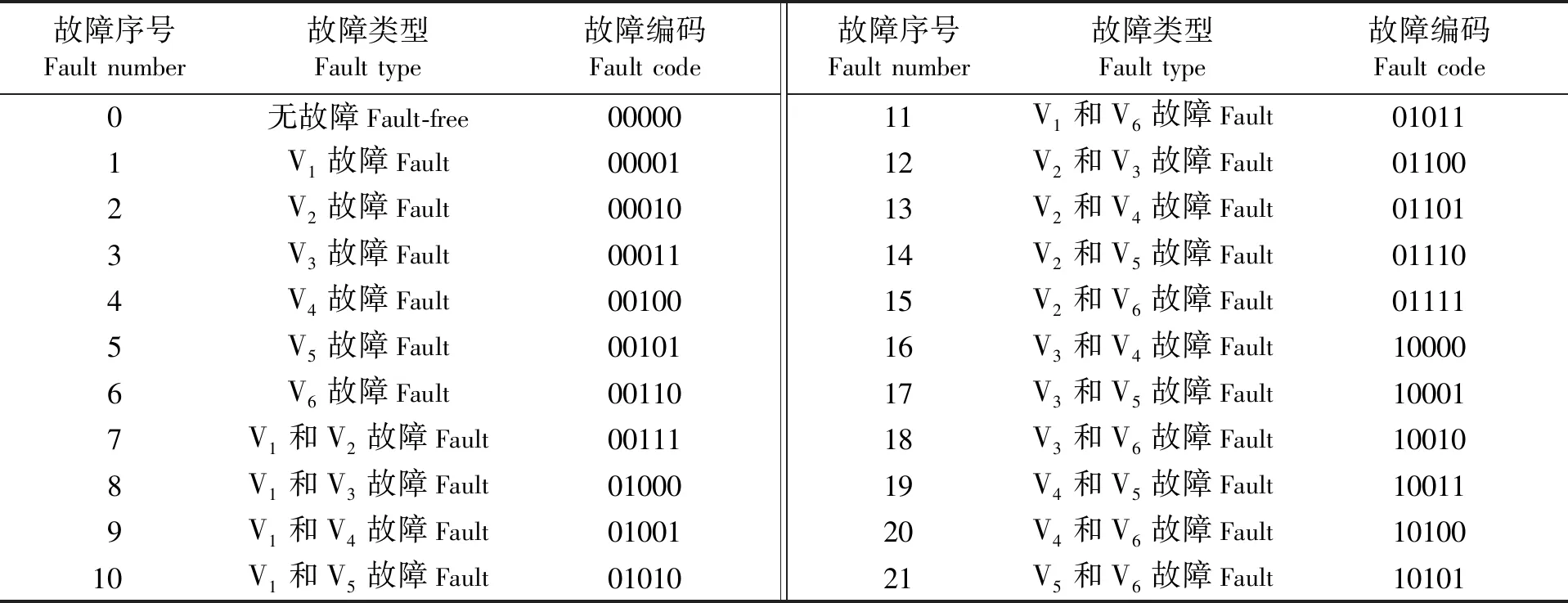
表1 故障類型及編碼
2 基于PCA-BLS的故障診斷方法
2.1 主成分分析法
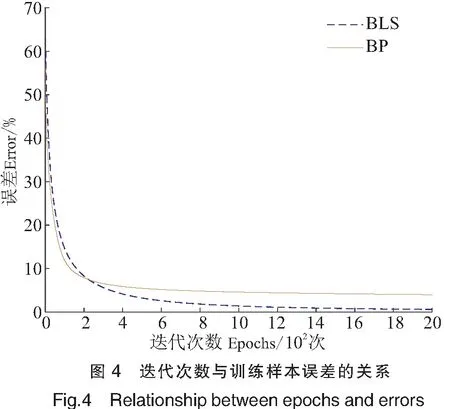
主成分分析法(principal component analysis,PCA)是一種數據降維處理技術,其基本思想是通過映射,將一種n維特征數據映射為m維特征數據(m 設三相逆變器輸出的三相電流分別為ia,ib,ic,通過采樣,每相電流各取r個值。將所獲得的三相電流數據作為故障樣本,故障樣本可表示為: x=[x1,x2,x3,…,xk]。 (1) 式中:xi(i=1,2,…,k)為每種故障樣本,該故障樣本可表示為 xi=[ia,ib,ic], (2) (3) 由于負載擾動及開關器件存在換相死區,實際的逆變器輸出電流信號包含有諧波干擾及其他無用的信息或噪聲。為了更好地獲取有用的故障特征,運用PCA對故障樣本數據進行處理。具體故障特征提取步驟如下。 1)對于n維故障樣本數據X=[x1,x2,…,xm],m為總的樣本個數,計算每個樣本xi的均值: (4) 2)用樣本均值來計算協方差矩陣: (5) 3)計算樣本協方差矩陣的特征值和特征向量: (6) 式中:Λ為協方差矩陣;λ1,λ2,…λn為特征值;Q為特征矩陣;q1,q2,…,qn為特征向量。 4)用特征值和特征向量計算前m行主元素的累計反差貢獻率: (7) 式中:ξ為累計反差貢獻率,通常大于或等于0.9。 選取特征矩陣Q前m個特征向量構建矩陣Qm,利用式(8)實現m維故障樣本數據提取: Y=QmX。 (8) 式中:Qm是由m行特征值(m 寬度學習系統(BLS)是在隨機向量函數鏈接神經網絡(random vector functional-link neural network,RVFLNN)基礎上發展的一種扁平神經網絡結構[12]。通過對RVFLNN中的隱層進行特殊運算,形成增強層,增強層與原有的輸入層一起并列到同一層,而輸出層節點直接與所有映射的輸入層特征節點和增強層節點相連,這樣就形成“扁平”化的網絡結構。由于減少了隱層,使得層間反向求導和迭代更新所花費的時間大大減少,提高了網絡運行效率。更重要的是,BLS通過快速的增量學習來擴展網絡結構,而無需進行全面完整的網絡再次訓練,更進一步減少了計算的冗余性和網絡訓練時間。圖2為隨機向量函數鏈接神經網絡,該網絡由輸入層、增強層和輸出層構成,圖中的權值W為輸入層及增強層節點到輸出層節點之間的權值系數。如果將RVFLNN的增強層與輸入層并列到同一層,形成新的輸入層,就實現了網絡向“寬度”方向擴展,擴展后的網絡就成為寬度學習系統網絡結構,如圖3所示,圖中的權值Wk為輸入層節點到輸出層節點之間的權值系數。 電流故障樣本數據經過PCA特征提取后,可得到數據樣本Yi,將其作為BLS的輸入數據。因此,輸入層任意第i種電流故障數據樣本表示為: Yi∈[Y1,Y2,…,Ym],i=1,…,m。 (9) 增強層第i個節點的輸出可表示為: Hi=f(YiWhi+bhi),i=1,…,m。 (10) 式中:Whi和bhi分別為對應節點的隨機權重和隨機偏移量;f表示神經網絡激活函數。 最終輸出層可表示為: Z=φ([Y|H]Wk)。 (11) 式中:Wk表示連接輸出層權重;φ表示神經網絡激活函數,本文均采用Sigmoid函數。 為了減少網絡訓練過程中的過擬合現象,需要計算總誤差: (12) 式中:Wn+m表示輸出層權重;σ和δ分別表示整個系統中的實際輸出和預期輸出;k表示輸出的故障樣本數。 網絡中使用了梯度下降算法,分別對權值W和偏移量b進行更新。通過推導誤差函數得到給定點的梯度。 ΔW=-η?E/?W。 (13) 由式(13)可推出Wn+m的更新方程為: (14) 式中:η表示步長參數,用于根據誤差程度調整權重。 綜上所述,BLS的方法主要有以下幾個步驟:1)對輸入數據進行線性變換,形成特征節點;2)特征節點通過非線性變換,隨機生成一個增強節點;3)所有的特征和增強節點都直接連接到輸出層;4)對權值進行更新,以降低誤差;5)得到相應的輸出權值。 在MATLAB/Simulink環境中搭建三相逆變器驅動的電機系統仿真模塊,仿真中直流電壓為600 V,采用PID控制方法。故障數據采樣時長為1 s,采樣間隔時間為0.05 s,采集得到三相逆變器輸出電流信號,每一相有21個數據。通過PCA特征提取,將三相逆變器故障數據尺寸從63×22降低到20×22,設置訓練步長為0.01,最高訓練次數為2 000次。 圖4為BLS與BP迭代次數與訓練誤差之間的關系曲線。從圖4中可以看出,剛開始時,BLS的訓練誤差減少速度較慢,但是隨著迭代次數的增加,其訓練誤差迅速減小,在迭代次數達到2 000次后,其訓練誤差幾乎為零,而BP網絡仍然存在較大的訓練誤差。 表2為迭代次數相同時兩種方法輸出結果需要耗費的時間。從表2中可得,當迭代次數為1 000次時,BP訓練和測試所用的時間大約是BLS的3倍;當迭代次數為2 000次時,BLS訓練和測試所用的時間約為BP的2/5。 表2 用時比較 為了驗證PCA-BLS故障診斷方法的有效性,在測試樣本數據中分別加入不同信噪比的高斯白噪聲干擾,并與傳統的BP神經網絡診斷結果進行比較。兩種方法的網絡訓練迭代次數均為2 000次,實驗結果如表3所示。從表3可以看出,隨著信噪比的增加,其準確率逐漸上升,且在各種噪聲干擾條件下,BLS的故障診斷準確率總是優于BP。當信噪比為40 dB時,BLS的準確率可達到100%,而BP的準確率只有95.45%,因此,在故障分類準確率及抗噪能力方面,BLS明顯優于BP神經網絡。 表3 兩種方法準確率比較 針對逆變器存在的開關器件開路故障問題, 提出一種基于主成分分析和寬度學習系統的逆變器故障診斷方法。根據不同開關元件開路故障模式,建立對應故障編碼。在MATLAB/Simulink環境下,搭建了逆變器供電的電動機驅動系統仿真模型。利用主成份分析方法對逆變器輸出的三相電流進行處理,獲得故障樣本數據。建立了寬度學習網絡系統,利用獲得的故障樣本數據對寬度學習系統進行訓練,通過寬度學習網絡系統的輸出編碼,實現了開關元件開路故障診斷。為了驗證本文研究方法的有效性,在故障樣本數據中增加不同信噪比噪聲干擾,分別對寬度學習系統和傳統的BP神經網絡進行訓練,網絡輸出結果表明,本研究方法的故障診斷準確率優于傳統的BP神經網絡。2.2 寬度學習系統

3 仿真分析


4 結論
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28當代陜西(2019年10期)2019-06-03 10:12:04數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54汽車維護與修理(2016年10期)2016-07-10 08:17:41重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58汽車維修與保養(2015年6期)2015-04-17 03:31:50汽車維護與修理(2015年2期)2015-02-28 12:15:39振動、測試與診斷(2014年5期)2014-03-01 01:14:21機械與電子(2014年1期)2014-02-28 02:07:31
