雙星編隊構形保持抗干擾容錯控制
2021-04-22 08:43:20陳高杰楊秀彬楊春雷黎艷博
光學精密工程 2021年3期
陳高杰 ,常 琳 ,楊秀彬 ,楊春雷 ,黎艷博
(1. 中國科學院長春光學精密機械與物理研究所,吉林長春130033;2. 中國科學院大學,北京 100049;3. 中國科學院天基動態快速光學成像技術重點實驗室,吉林長春130033)
1 引 言
衛星編隊憑借其可靠性高、靈活性強、適應性廣的特點,擁有極高的應用價值,已經被廣泛應用于科學實驗、近地觀測、深空探測、干涉測量等諸多領域[1-4]。衛星工作于真空失重狀態,長期受到強輻射及高低溫等惡劣空間環境的影響,并且衛星自身元器件工藝水平、老化磨損均會導致執行器發生故障。若衛星發射入軌后發生故障,一般難以修復,需要使用星上冗余元器件保證衛星繼續工作。但受到衛星研發和發射成本的限制,難以在衛星系統上安裝過多元器件,另外,衛星運行過程中,受到地球質量分布不均和非球形、日月三體引力、大氣阻力、太陽光壓等影響,導致編隊構形發生變化,故需設計合理的故障估計以及容錯控制策略,進行構形保持控制,以提高衛星編隊系統的可靠性和安全性[5]。
針對故障估計與容錯控制,眾多學者進行了大量研究,其中一些方法已廣泛應用于衛星編隊軌道控制系統[6-8]、航天器姿態控制系統[9-11]、無人機飛行控制系統[12-13]及電力電子控制系統[14-15]等領域。文獻[6]為解決碰撞避免、障礙規避的問題,設計了結合勢函數制導方法的滑模協同控制策略,同時在所提控制算法中引入自適應律,提高了執行器故障容錯控制、參數自適應能力,使航天器編隊在進行目標跟蹤和構形保持的同時,防止編隊航天器間碰撞并具備躲避障礙物的能力。文獻[16]基于H∞最優理論和矩陣奇異值分解技術,使用分散狀態反饋方法,對衛星軌道保持系統進行容錯控制研究,提出了允許執行器故障和傳感器故障的兩種分散控制方法,在保持故障系統漸近穩定的同時,使控制性能在H∞范數意義下達到次優。文獻[17]設計了非線性增廣觀測器,此觀測器考慮多種故障形式,而不局限于常值或緩變故障,進一步針對一般情況下的系統,設計了魯棒增廣觀測器,可以進行更精確的故障估計,且適用于多個故障并發情況。文獻[18]針對推進器堵塞或關閉等故障情況,提出基于H∞/H-的濾波器的故障估計方案,仿真表明,該濾波器在航天器存在測量噪聲、測量延遲、傳感器失調的情況下,能夠進行故障的精確診斷,并隔離故障。文獻[19]通過故障辨識模塊和輔助系統模塊進行故障估計,通過反步容錯控制方法,使編隊存在拓撲故障、舵面故障、執行器故障和不確定性的情況下,依然可以使編隊穩定飛行。另外,編隊衛星長期在軌運行,可能發生故障的同時,亦會受到多種內部或外部攝動干擾的作用,這些干擾均會嚴重影響編隊衛星正常軌道運動,導致衛星編隊實際構形偏離預設構形[20]。然而,少有文獻綜合考慮包括模型誤差、衛星故障以及外部干擾等在內的安全問題,并且當此類飛行要求與設計的構形保持控制目標相結合時,將進一步增加控制器的設計難度[6,17]。
故本文在對衛星編隊系統進行故障估計的基礎上,考慮未知擾動及系統模型參數不確定性,對衛星編隊進行抗干擾容錯控制研究。首先設計可以綜合估計系統模型誤差、外部干擾以及執行器故障的觀測器系統,對系統未知信息進行估計,另外在觀測器設計時,加入殘差微分模塊,提高估計準確度。然后基于相關估計信息,引入H∞方法,減弱不可建模干擾部分對系統的影響,設計閉環反饋抗干擾容錯LQR 控制策略。最后仿真結果表明,所提基于觀測器的控制策略具有更精確的控制性能。
2 衛星編隊動力學模型
2.1 坐標系定義
2.1.1 地心赤道坐標系(慣性坐標系)Oe-XiYiZi
坐標系原點Oe為地心,以赤道面作為基準面,Xi軸指向春分點,Yi軸在軌道面內由Xi軸向東轉90°,Zi軸垂直赤道面指向北極。
2.1.2 參考星質心軌道坐標系(相對運動坐標系)O-XoYoZo
坐標原點O位于參考星質心,Xo軸與參考星地心矢量rm重合,Yo軸在參考星軌道面內垂直于Xo軸并以指向參考星運動方向為正向,Zo軸和Xo,Yo軸構成右手系。坐標系示意圖見圖1。
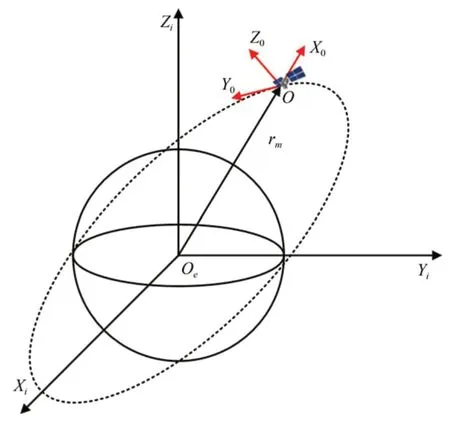
圖1 坐標系示意圖Fig.1 Coordinate system schematic diagram
2.2 相對運動動力學模型
雙星編隊由參考星和跟隨星組成,兩星沿飛行方向相隔一段距離,以設計構形運行于同一太陽同步軌道上。假設衛星運動軌道為圓軌道,將兩顆衛星均視為質點,采用經典C-W 方程相對運動動力學模型[21]表示:
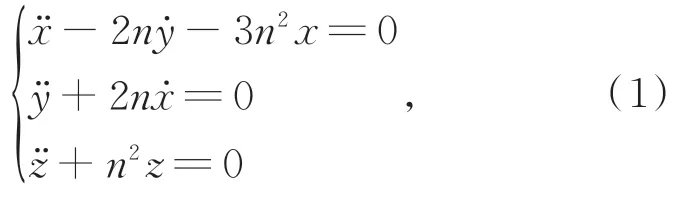
其中:x,y,z分別為兩星相對距離沿X軸,Y軸,Z軸分量,n為參考星軌道角速率。
考慮對編隊衛星進行控制的情況,相對運動方程組(1)可轉化為方程組(2):
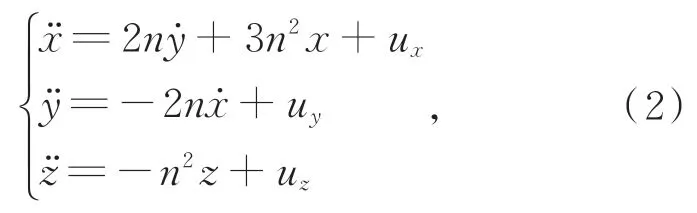
其中,μx,μy,μz分別為控制力在軌道坐標系下的 3個坐標軸分量。
由式(2)可得系統狀態空間方程:

其中:狀態變量χT(t)=[x y z x˙y˙z˙]T表示三軸相對位置和速度,輸出變量ζT(t)=[x y z]T表示傳感器測量值;A,B,C矩陣取:
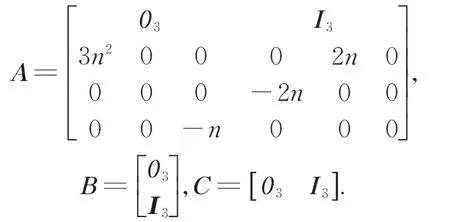
此外,考慮參數攝動、外部擾動、執行器故障等模型不確定因素,則雙星編隊控制系統可描述為:

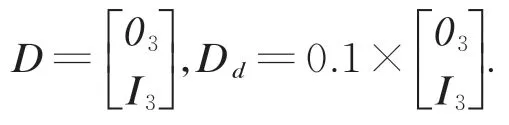
其中:f(t)表示執行器故障;ω(t)表示外部擾動變量,如空間干擾力;Φ(t)表示因參數攝動、外部擾動等引起的等效未知干擾向量;ΔA表示由地球質量分布不均和非球形、日月三體引力、大氣阻力、太陽光壓等參數不確定導致的攝動矩陣,且滿足ΔAχ(t)=Dd1(t)+Δ,其中D表示具有參數攝動結構信息的已知矩陣,d1(t)和Δ 分別表示具有參數攝動能量信息的可建模干擾與不可建模干擾。
基于上述模型,給出以下假設:
假設1.故障范數有界且可微,滿足‖f(t) ‖≤η1,其中η1與η2為有界正實數。
假設2. 外部干擾具有如下形式:

其中:Ddd2(t)= Δ+ω(t),Dd表示干擾分布矩陣,d2(t)表示不可建模干擾,如隨機噪聲、模型不確定性。假設d2(t)是范數有界的,同時,可建模干擾d1(t)可等效為以下外系統的輸出:

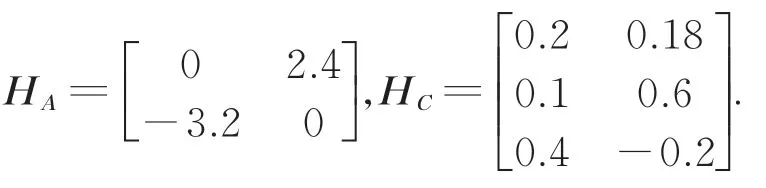
其中:ρ(t)表示外系統的狀態,HA和HC是具有適當維數的已知矩陣。
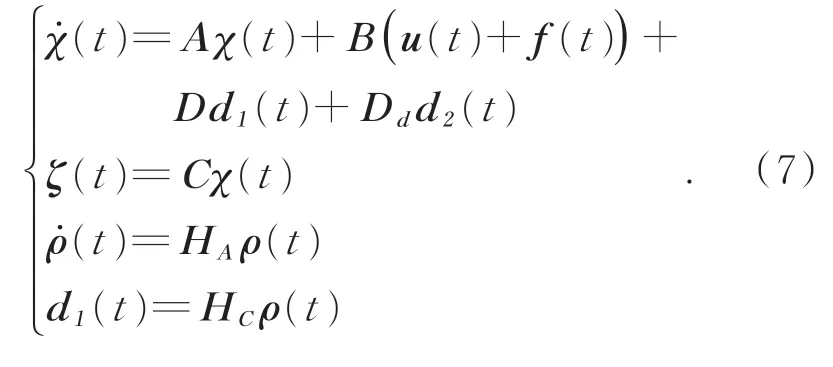
假設3. 系統(4)能控且能觀。
系統(4)可轉化為如式(7)的形式:
3 觀測器設計
本節主要給出自適應觀測器的設計方法及存在條件,進行穩定性與魯棒性分析,同時給出其證明過程,以及求解觀測器設計參數的LMI(線性矩陣不等式)算法。
3.1 自適應觀測器設計
基于系統(7),設計如式(8)所示的自適應觀測器:
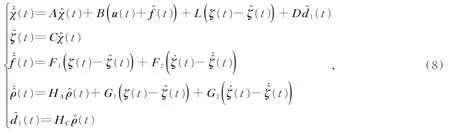
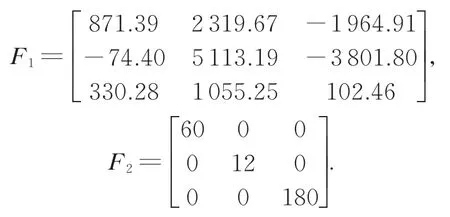
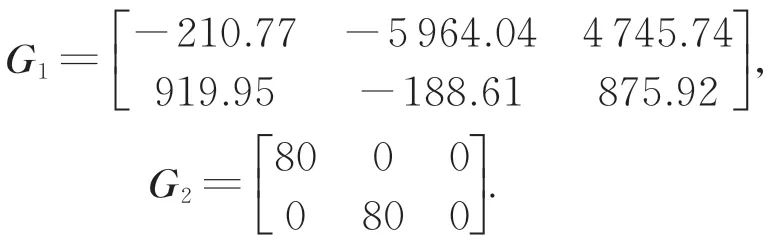
其中:L為觀測器增益,F1與F2為故障估計權重,G1與G2為干擾估計權重,以上均為待設計參數變量表示估計狀態表示估計輸出,表示估計故障表示外系統(6)估計狀態。
定義如下變量:
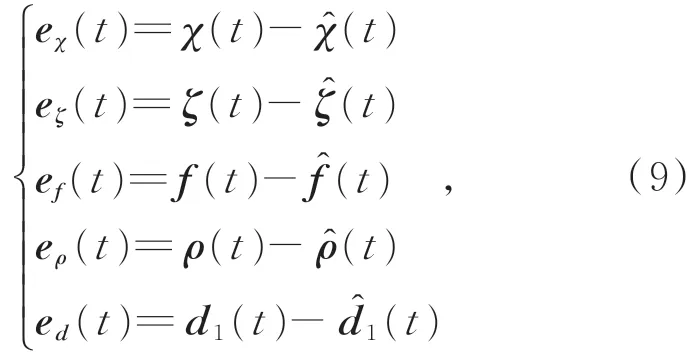
其中:eχ(t)表示狀態估計誤差,eζ(t)表示輸出殘差,ef(t)表示故障估計誤差,eρ(t)表示外系統(6)狀態估計誤差,ed(t)表示干擾估計誤差。
由系統(7)和觀測器系統(8),可以得到動態誤差系統:
將系統(10)增廣為如式(11)的形式:
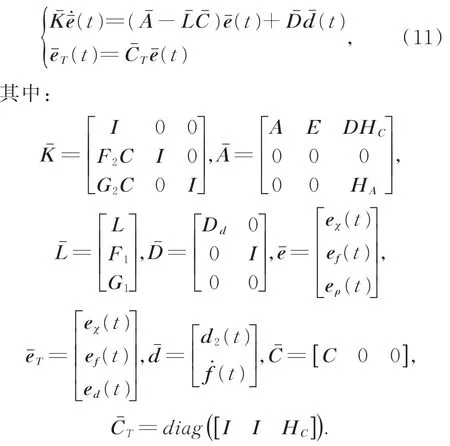
對于任何F2C和G2C,均為非奇異矩陣,則系統(11)可轉化為:

對系統進行Laplace 變換,可以得到系統動態誤差:表示估計干擾

注1.對系統(8)中的自適應律進行積分,有:
其中:ts為系統未發生故障時的某一時刻,在不考慮外擾等條件下有eχ(ts)=0。此時故障估計器與干擾估計器均包含比例與積分兩個模塊,相較于常規的自適應算法,增加的比例單元,一方面增加了算法設計的自由度,另一方面也能有效提高故障與干擾估計的快速性和精度,這在后文仿真對比實驗中得到驗證。
首先給出本文要用到的一些引理。
引理1. 存在對稱正定矩陣P使得對滿足βTβ≤υTCTCυ的所有υ≠ 0 和β,有:
成立當且僅當存在標量τ,使得:
其中:符號A S表示A+AT,*表示該矩陣的對稱元素。
引理2. 給定矩陣A,A的全部特征值均位于圓形穩定域C(c,r),其中c與r分別為圓形穩定域的圓心與半徑,當且僅當存在正定對稱矩陣P,使得:

3.2 穩定性與魯棒性分析
為設計觀測器增益矩陣L,權重矩陣F1,F2,G1,G2使所提魯棒自適應觀測器能夠快速精確地系統模型誤差、外部干擾以及執行器故障,給出如下定理。
定理1. 考慮系統(7)、觀測器系統(8),如果存在觀測器增益L,故障估計權重F1與F2,干擾估計權重G1與G2,常數α> 0,ε> 0,當且僅當存在對稱正定矩陣P,矩陣Y,使得:
證明:由于是非奇異的,對于對稱正定矩陣P而言,易知矩陣也一定是對稱正定的。可選取Lyapunov 函數為:

顯然,V(t)是正定的。首先,討論當=0時系統(12)的穩定性問題。求式(20)對時間的導數,有:


當式(22)滿足時,系統(12)是漸近穩定的,狀態估計誤差eχ(t),故障估計誤差ef(t)和干擾估計誤差ed(t)漸近收斂于0。
參考H∞性能指標,有:

則在零初始條件下,有:



能夠保證式(27)的成立:

且存在T> 0,對于任意t>t0+T,有:

這表示動態誤差系統是漸近穩定的,且系統狀態、故障、干擾的估計誤差eˉT(t)最終一致有界。
由 Schur 補引理,式(25)可轉化為如式(29)等價形式:
其中條件(29)的滿足隱式地保證了條件(22)也成立。
給定圓穩定域C(c,r),由引理 2,存在對稱正定矩陣有:

對式做合同變換,得到:

得證。
4 抗干擾容錯反饋控制策略
針對衛星編隊構形保持控制系統,常用的控制方法主要有:LQR(Linear Quadratic Regulator)最優控制、滑模變結構控制、李雅普諾夫控制等方法。其中,LQR 最優控制形式簡潔,方便設計而且物理意義明確,因此本文采用LQR 方法進行衛星編隊構形保持容錯控制,并結合故障估計、干擾補償項來減小控制誤差,提高控制精確度,控制系統結構圖見圖2。
二次型指標最優性能指標函數如式(32)所示:
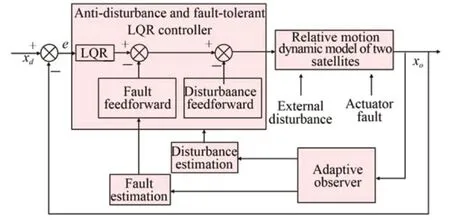
圖2 閉環控制框圖Fig.2 Close-loop of satellite formation control system
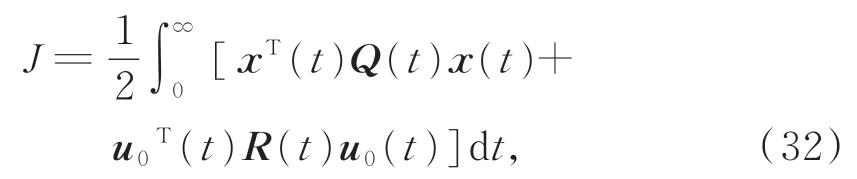
其中:Q為半正定對稱矩陣,表示狀態x權重,影響控制過程中響應速度,R為對稱正定矩陣,對控制能力的要求,決定控制過程中能量消耗,u0為控制輸入。
根據最優控制理論,反饋控制律是:

其中K為最優反饋矩陣,求解Riccati 微分方程:

得最優矩陣反饋矩陣K:

其中,P為Riccati 微分方程的唯一解。
設計如下基于觀測器的動態輸出前饋補償容錯抗干擾控制器:

其中,Kd由式(37)給定:

滿足BKd=D,其中Z是適當維數的任意矩陣,B+表示矩陣的Moor-Penrose 逆矩陣。
5 仿真實驗分析
為了驗證本文所提方法在雙星編隊構形保持控制的有效性,本節進行仿真分析。為便于分析,假設參考星、跟隨運行于圓軌道,進行協同遙感拼接成像任務,相較于單星遙感成像方式,雙星拼接寬幅成像方式使用多顆衛星對相鄰區域進行觀測,使用圖像拼接技術,可以獲得超寬幅圖像。使用LQR 控制器進行精確相對位置控制,使雙星編隊從初始構形恢復至期望構形。
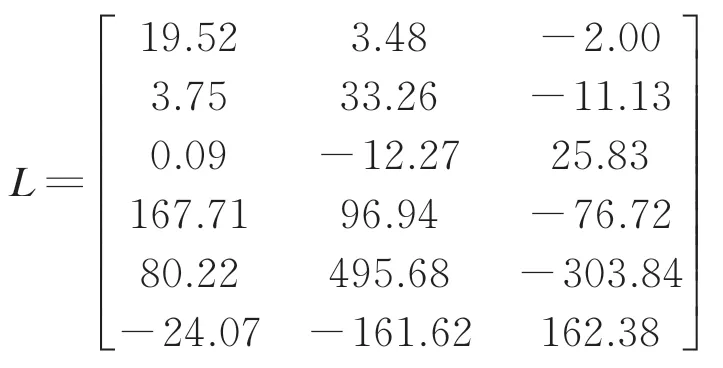
極點配置取O(-30,29),由定理 1 得到觀測器設計參數:觀測器增益矩陣L取:
故障估計權重矩陣F1與F2取:
干擾估計權重矩陣G1與G2取:
假設衛星編隊系統在軌飛行過程中,受到的外部干擾d1(t)、d2(t)影響,其中,d1(t)為可建模干擾,d2(t)∈ [-1,1],表示在 0~20 s 區間內的隨機干擾。假設干擾的分布矩陣為:
外部干擾系統(6)參數矩陣:
執行器故障設計如下,同時考慮了無故障(x軸)、間歇性故障(y軸)、時變故障(z軸)三種情況:
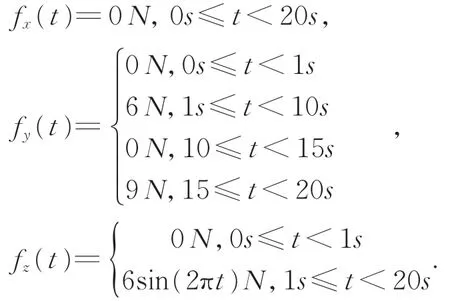
其他相關參數選取見表1。
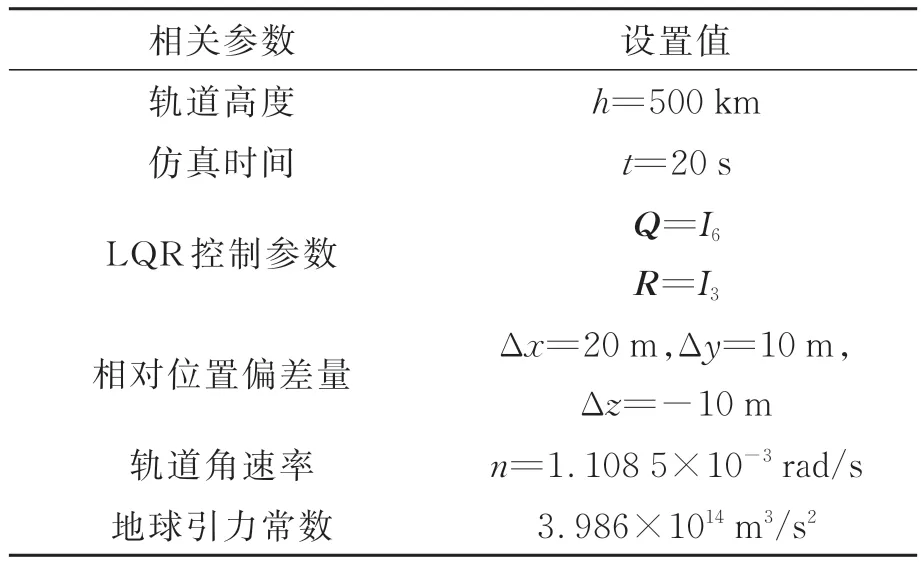
表1 控制器仿真參數設置Tab.1 Controller simulation parameters setting
根據上述條件,仿真結果如圖3~圖5。
圖3 x 軸控制效果Fig.3 x-axis control effect
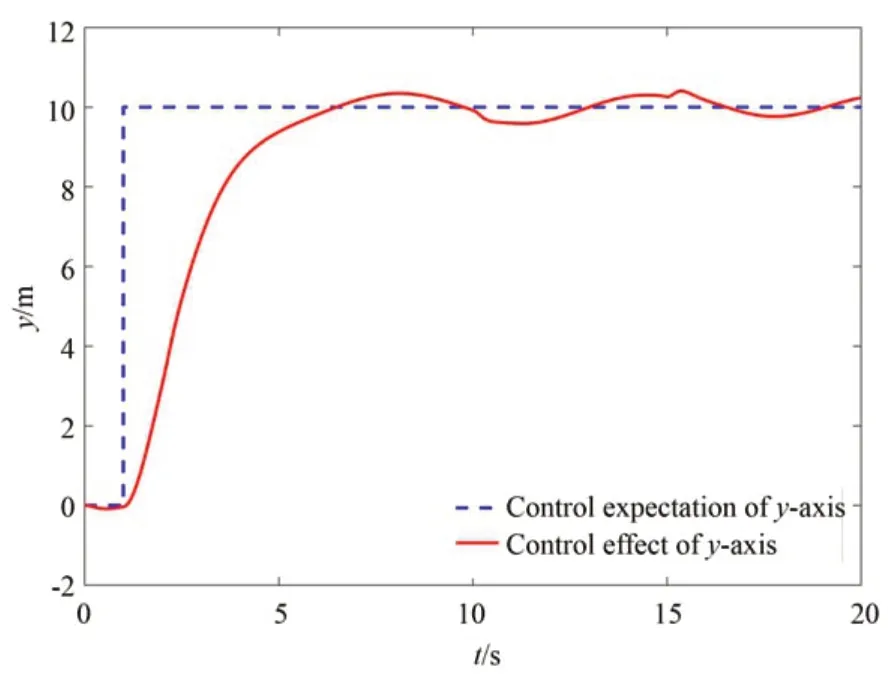
圖4 y 軸控制效果Fig.4 y-axis control effect
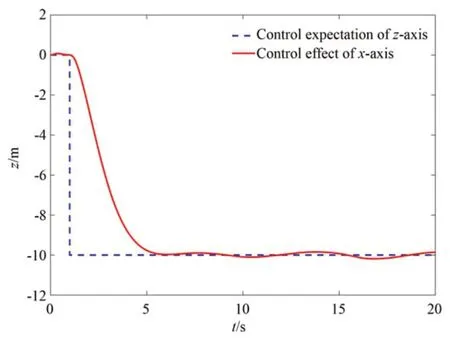
圖5 z 軸控制效果Fig.5 z-axis control effect
圖3~圖5 表示控制效果,從圖中可以看出,在存在系統模型誤差、外部干擾以及執行器故障的等復雜太空環境下,使用本文提出的基于觀測器的容錯控制方法,可以快速使編隊恢復預設構形,并在較短的時間內使系統達到穩態,且構形恢復過程較為平穩,震蕩較小且幾乎沒有波動。
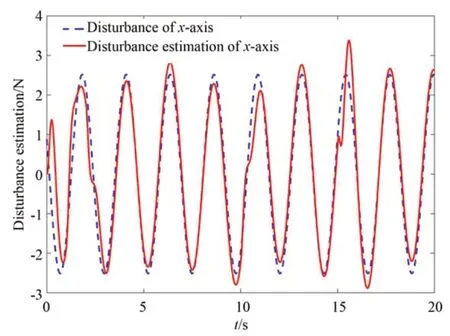
圖6 x 軸干擾估計Fig.6 x-axis disturbance estimation
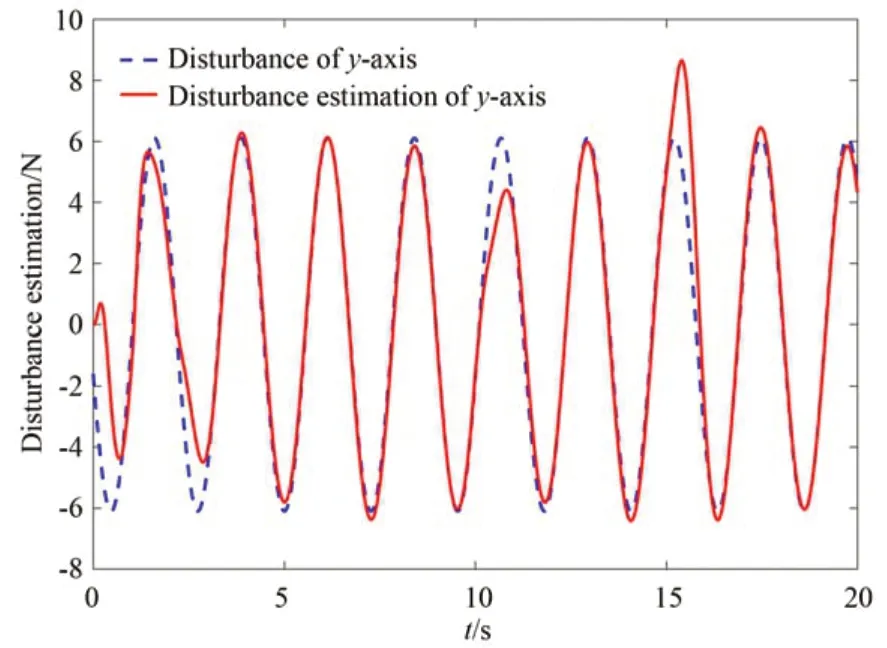
圖7 y 軸干擾估計Fig.7 y-axis disturbance estimation
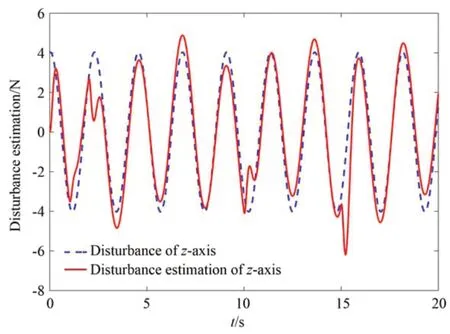
圖8 z 軸干擾估計Fig.8 z-axis disturbance estimation
圖6~圖8 表示干擾估計情況,從圖中可以看出,本文設計的干擾觀測器可以對外部攝動干擾進行估計。
圖9 表示狀態估計情況,從圖中可以看出,狀態跟蹤誤差保持在較小范圍內,能夠實現對狀態的跟蹤。
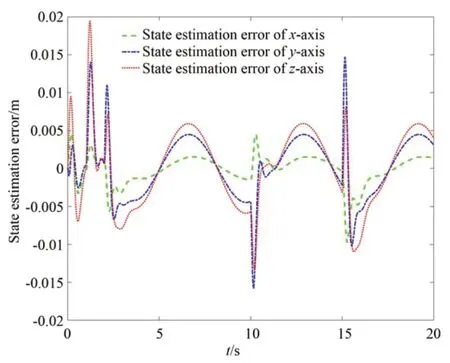
圖9 狀態估計誤差Fig.9 State estimation error
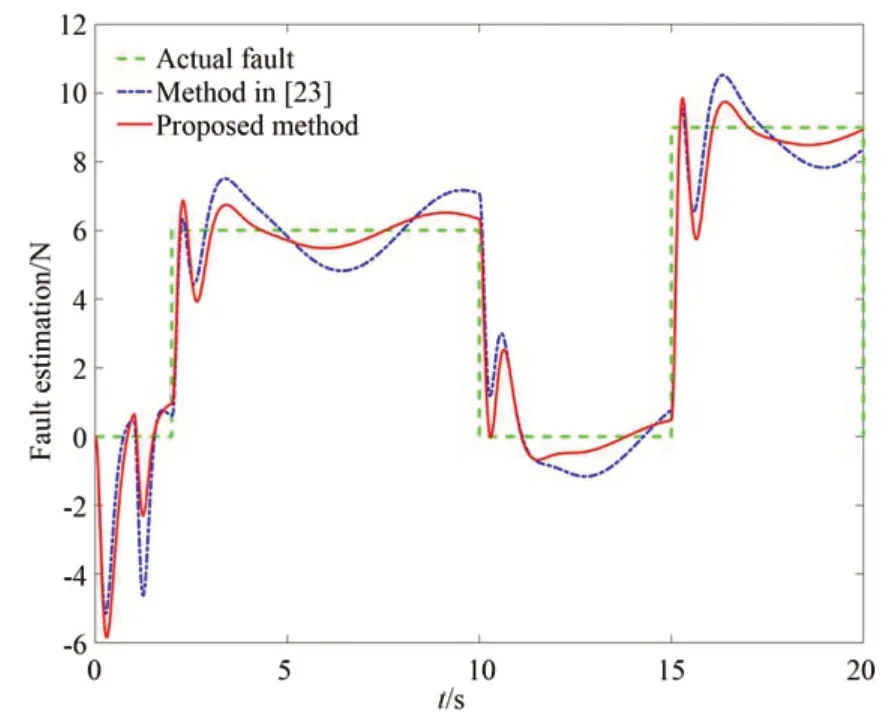
圖10 y 軸間歇故障估計情況Fig.10 y-axis intermittent fault estimation
分別在x軸、y軸、z軸添加無故障模塊、間歇性故障模塊、時變故障模塊,圖10~圖11 分別表示故障觀測器對故障的估計情況,圖中表明,文獻[23]和本文提出的觀測器均可以對故障進行估計,但相對文獻[23]提出的觀測器,本文提出的觀測器對故障估計更為精確,性能有明顯提高。
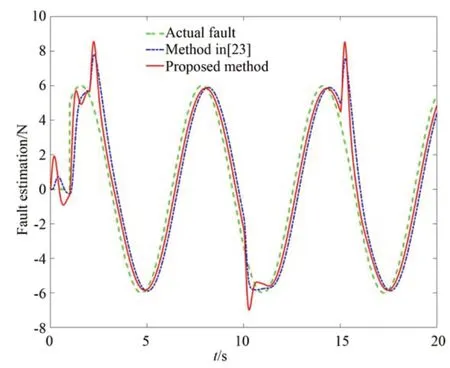
圖11 z 軸時變故障估計情況Fig.11 z-axis time varying fault estimation
圖12 表示系統存在模型誤差、外部干擾以及執行器故障的情況下,以y軸控制效果為例,分別使用文獻[22]提出方法、文獻[23]提出方法以及本文提出方法,結合LQR 控制器,并加入前饋補償項,對系統進行反饋容錯控制,仿真結果表現,在使用文獻[22]所提方法,即無干擾觀測器時,系統具有十分明顯的波動,難以達到穩態,說明H∞技術無法抑制全部干擾;使用干擾觀測器情況下,控制效果得到改善,相比文獻[23]所提方法,由于本文提出的觀測器對模型誤差、故障和干擾進行估計時,引入殘差微分模塊,并在容錯控制時加入前饋補償項,超調量明顯降低,控制器精度提高了49.93%,能夠滿足雙星編隊精確構形保持控制目標。
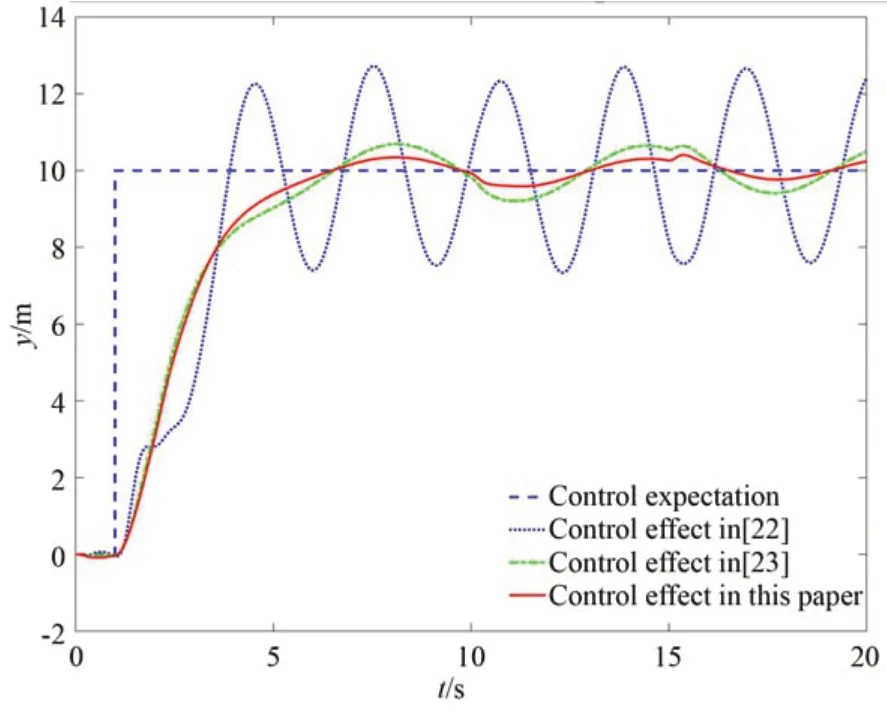
圖12 控制效果對比Fig.12 Control effect comparison
6 結 論
本文對雙星編隊執行器故障估計的同時,考慮空間環境干擾的復雜性及軌道運動建模誤差的影響,設計了一種可以綜合估計系統模型誤差、外部干擾以及執行器故障的增廣觀測器系統。另外,引入了殘差微分模塊,提高估計速度和準確度,采用了H∞方法,減小干擾中不可建模部分對控制系統的影響。最后,利用觀測器對系統未知狀態的估計信息,設計閉環反饋抗干擾容錯LQR 控制律,并使用Lyapunov 穩定性理論證明了控制系統的穩定性。仿真結果表明,本文方法的控制精度提高了49.93%,證明了所提方法的有效性與優越性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50