國(guó)內(nèi)汽車(chē)市場(chǎng)駕駛?cè)搜蹌?dòng)行為檢測(cè)技術(shù)分析
2021-04-21 14:15:42牛增良孟德宇王光耀
汽車(chē)實(shí)用技術(shù) 2021年7期
牛增良,孟德宇,王光耀
國(guó)內(nèi)汽車(chē)市場(chǎng)駕駛?cè)搜蹌?dòng)行為檢測(cè)技術(shù)分析
牛增良,孟德宇,王光耀
(中國(guó)汽車(chē)技術(shù)研究中心有限公司,天津 300300)
為研究不同認(rèn)知分心等級(jí)時(shí)的駕駛?cè)搜蹌?dòng)行為,通過(guò)數(shù)理統(tǒng)計(jì)的分析方法,對(duì)實(shí)車(chē)道路試驗(yàn)采集的駕駛?cè)送瓿刹煌燃?jí)認(rèn)知次任務(wù)時(shí)的眼動(dòng)行為特性指標(biāo)進(jìn)行了對(duì)比分析,定量研究了不同認(rèn)知分心等級(jí)時(shí)駕駛?cè)说恼Q邸咭暭白⒁暤淖兓?guī)律。結(jié)果表明:認(rèn)知次任務(wù)復(fù)雜度、眨眼頻率、掃視幅度、視野廣度之間顯著相關(guān)。隨著認(rèn)知次任務(wù)難度的增加,駕駛?cè)苏Q垲l率顯著增加、搜索廣度明顯縮小、注視點(diǎn)分布更加集中。可見(jiàn)本文的研究可以為基于眼動(dòng)行為的駕駛輔助系統(tǒng)的開(kāi)發(fā)提供理論支持。
實(shí)車(chē)試驗(yàn);認(rèn)知分心;掃視行為;注視行為
前言
駕駛車(chē)輛是一項(xiàng)復(fù)雜的操作,需要駕駛?cè)碎L(zhǎng)時(shí)間維持警覺(jué),但是駕駛?cè)诵熊?chē)過(guò)程中主動(dòng)參與分心活動(dòng)的現(xiàn)象卻很常見(jiàn),例如手機(jī)通話、與乘客交談、聽(tīng)廣播等,這對(duì)駕駛安全造成潛在的危害。與視覺(jué)分心(視線偏離道路)和操作分心(肢體偏離操控裝置)不同,駕駛?cè)苏J(rèn)知分心指駕駛?cè)说淖⒁饬鸟{駛主任務(wù)轉(zhuǎn)移到額外的思維活動(dòng)上,是一種內(nèi)源性質(zhì)的分心形式。
國(guó)內(nèi)外大量研究表明,認(rèn)知分心對(duì)駕駛?cè)艘曈X(jué)特性影響明顯。馬勇[1]等人通過(guò)對(duì)分析分心任務(wù)對(duì)駕駛?cè)说挠绊懀l(fā)現(xiàn)認(rèn)知分心比視覺(jué)分心會(huì)對(duì)駕駛?cè)水a(chǎn)生更高的精神負(fù)荷。Lamble等[2]的研究表明,駕駛?cè)嗽隈{駛的同時(shí)執(zhí)行非視覺(jué)相關(guān)的認(rèn)知分心次任務(wù),會(huì)損害駕駛?cè)藢?duì)危險(xiǎn)的檢測(cè)能力,表現(xiàn)為對(duì)前車(chē)的制動(dòng)反應(yīng)時(shí)間顯著增加。Patten等[3]研究了駕駛?cè)舜螂娫挼耐瑫r(shí)完成外圍檢測(cè)任務(wù)(PDT)。結(jié)果表明,駕駛?cè)舜螂娫挄r(shí),對(duì)LED的反應(yīng)時(shí)間顯著增加,而且當(dāng)交談內(nèi)容的復(fù)雜性增加時(shí),駕駛?cè)说姆磻?yīng)時(shí)間均顯著增加。Harbluk等[4]基于實(shí)際道路環(huán)境,研究了打電話行為對(duì)駕駛?cè)艘曈X(jué)行為的影響,研究發(fā)現(xiàn)認(rèn)知注意力分散時(shí),駕駛?cè)藢?duì)左右后視鏡、內(nèi)后視鏡、儀表盤(pán)等周?chē)h(huán)境關(guān)注的時(shí)間較少,對(duì)前方視野的注視時(shí)間增加。吳付威等[5]研究干擾跟車(chē)情況下駕駛?cè)说淖⒁饬Ψ峙涮匦裕l(fā)現(xiàn)在有干擾車(chē)出現(xiàn)時(shí),駕駛?cè)藢⒆⒁饬^多地分配到干擾車(chē)出現(xiàn)一側(cè),對(duì)前方視野的關(guān)注程度相對(duì)降低。Harbluk等[6]探討了認(rèn)知分心對(duì)駕駛?cè)艘曈X(jué)行為的影響,發(fā)現(xiàn)隨著認(rèn)知任務(wù)負(fù)荷的增加,駕駛?cè)说膾咭暣螖?shù)減少,而注視道路中央的時(shí)間顯著增加,并且關(guān)注右側(cè)區(qū)域的時(shí)間減少。Miyaji等[7]通過(guò)對(duì)駕駛?cè)藦?qiáng)加交談和計(jì)算任務(wù),重點(diǎn)研究了如何檢測(cè)識(shí)別駕駛?cè)苏J(rèn)知分心。研究表明在正常駕駛期間,前方注視點(diǎn)廣泛地分布在周邊區(qū)域,然而施加認(rèn)知分心任務(wù)后,前方注視點(diǎn)主要集中在狹小的范圍內(nèi)。Strayer等[8]通過(guò)對(duì)比不同試驗(yàn)環(huán)境下駕駛?cè)诵袨樯钊肓私怦{駛?cè)苏J(rèn)知分心。結(jié)果發(fā)現(xiàn),即使駕駛?cè)艘暰€不偏離前方道路,但認(rèn)知分心抑制駕駛?cè)素?fù)責(zé)安全駕駛的大腦區(qū)域活動(dòng),削弱了對(duì)駕駛環(huán)境的視覺(jué)掃描能力。馬勇[9]等通過(guò)對(duì)不同道路交通環(huán)境中駕駛?cè)说囊曈X(jué)特性進(jìn)行研究,發(fā)現(xiàn)不同道路環(huán)境對(duì)駕駛?cè)说漠a(chǎn)生的視覺(jué)負(fù)荷不同,從而顯著影響駕駛?cè)藢?duì)不同區(qū)域和目標(biāo)的注視頻次和注視時(shí)間。
綜上,國(guó)內(nèi)缺少實(shí)車(chē)道路試驗(yàn),國(guó)外研究多集中于對(duì)駕駛?cè)四骋灰曈X(jué)特性指標(biāo)的研究。本文擬研究城市與郊區(qū)之間的連接線路這一特定的環(huán)境下,不同認(rèn)知分心等級(jí)時(shí)的駕駛?cè)巳康难蹌?dòng)特性規(guī)律研究,以期為分心檢測(cè)提供理論支持。通過(guò)調(diào)研國(guó)內(nèi)外研究現(xiàn)狀,明確本文研究的眼動(dòng)行為參數(shù)主要包括:累計(jì)關(guān)注時(shí)間、搜索廣度、峰值與平均掃視速度、掃視頻率與幅度、眨眼頻率等指標(biāo)。
1 駕駛?cè)苏J(rèn)知分心實(shí)車(chē)試驗(yàn)
1.1 試驗(yàn)設(shè)備與被試選擇
本文采用FaceLAB5眼動(dòng)儀采集駕駛?cè)说难蹌?dòng)數(shù)據(jù),如圖1與圖2所示,但是在校對(duì)過(guò)程中,32名被試者中有8名因?yàn)檠劬Φ南忍鞓?gòu)造或佩戴眼鏡等原因,無(wú)法通過(guò)標(biāo)定。因此,在選擇被試駕駛?cè)藭r(shí),避免鏡片的反光干擾眼動(dòng)儀的識(shí)別準(zhǔn)確率;駕駛?cè)说恼鎸?shí)駕齡須在5年以上,且非營(yíng)運(yùn)駕駛?cè)恕T囼?yàn)用車(chē)為大眾途安轎車(chē)。
1.2 試驗(yàn)道路選取
駕駛?cè)送ǔP旭偟牡缆奉?lèi)型主要有城市道路、高速公路、以及城市之間或者城市與郊區(qū)的連接線路。城市內(nèi)部主要以50km/h以下的車(chē)速通行,高速公路則在80km/h以上。當(dāng)在城市道路行駛時(shí),由于交通構(gòu)成復(fù)雜,駕駛?cè)送ǔW⒁饬^集中,而高速公路上行駛,車(chē)速非常快,駕駛?cè)送ǔ13指叨染琛Nㄓ谐鞘兄g或者城市與郊區(qū)的連接線路,速度通常維持在60km/h左右,交通構(gòu)成單一,駕駛?cè)巳菀追潘删瑁鲃?dòng)參與認(rèn)知分心活動(dòng)。因此,對(duì)最后一種道路類(lèi)型下駕駛?cè)说恼J(rèn)知分心研究更有意義。

圖1 眼動(dòng)儀紅外攝像機(jī)安裝位
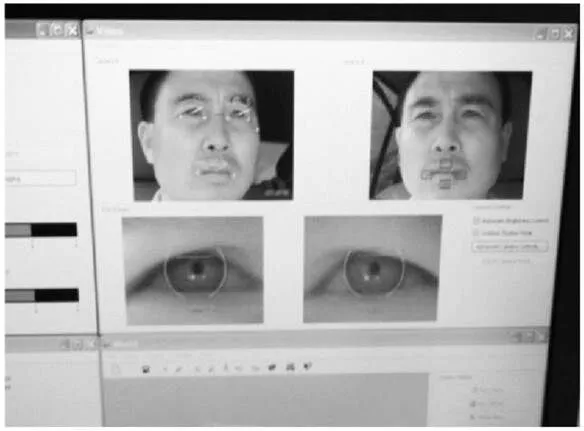
圖2 眼動(dòng)儀系統(tǒng)運(yùn)行主界面
1.3 試驗(yàn)過(guò)程
試驗(yàn)通過(guò)實(shí)車(chē)道路試驗(yàn)的形式開(kāi)展,試驗(yàn)過(guò)程包括準(zhǔn)備、調(diào)試、試驗(yàn)以及記錄五個(gè)部分。
(1)試驗(yàn)人員利用10分鐘時(shí)間向參與試驗(yàn)的24名被試人員說(shuō)明試驗(yàn)要求,試驗(yàn)任務(wù)及整個(gè)流程;
(2)對(duì)眼動(dòng)儀進(jìn)行安裝、調(diào)試和標(biāo)定,眼動(dòng)儀能正確追蹤駕駛?cè)俗⒁朁c(diǎn)位置就算是通過(guò)驗(yàn)證;
(3)開(kāi)展實(shí)車(chē)試驗(yàn),制定不同等級(jí)分心任務(wù),以是否帶借位的兩位數(shù)加減法作為區(qū)分標(biāo)準(zhǔn)。
(4)試驗(yàn)全程采集駕駛?cè)搜蹌?dòng)數(shù)據(jù),并由專(zhuān)門(mén)負(fù)責(zé)人記錄執(zhí)行試驗(yàn)任務(wù)的起止時(shí)刻,通過(guò)標(biāo)志性建筑的時(shí)刻,區(qū)分直道與彎道的時(shí)刻以及發(fā)生諸如超車(chē)、變道等行為的時(shí)刻。
1.4 試驗(yàn)數(shù)據(jù)分析
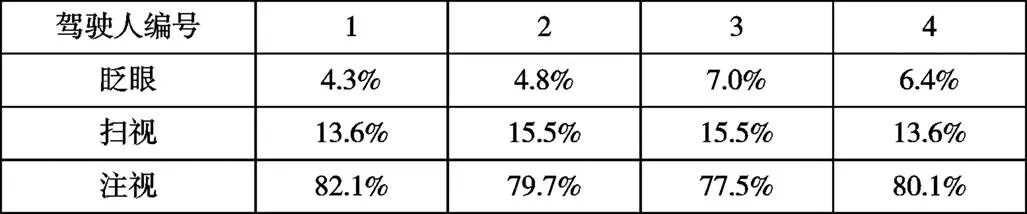
某一駕駛?cè)嗽谠囼?yàn)過(guò)程中無(wú)分心任務(wù)狀態(tài)下的注視點(diǎn)分布圖如圖3所示。通過(guò)對(duì)原始數(shù)據(jù)的統(tǒng)計(jì),可知駕駛?cè)舜蟛糠謺r(shí)間都處于注視狀態(tài)如表1所示,而掃視行為其次,僅輔助獲取目標(biāo)位置。
表1 駕駛?cè)烁餮蹌?dòng)行為累計(jì)時(shí)間百分比
2 駕駛?cè)俗⒁曅袨檠芯?/h2>2.1 注視區(qū)域的劃分
本文把駕駛?cè)说淖⒁晠^(qū)域分為6個(gè)部分。“1區(qū)”表示道路中心區(qū)域,參考Victor等[10]人的研究,該區(qū)域是駕駛?cè)双@取道路信息的主要注視區(qū)域;“2區(qū)”表示左后視鏡及附近區(qū)域,用于研究駕駛?cè)诵熊?chē)過(guò)程中對(duì)車(chē)輛右后方目標(biāo)的關(guān)注;“3區(qū)”表示右后視鏡及附近區(qū)域,用于研究駕駛?cè)藢?duì)車(chē)輛左后方目標(biāo)的關(guān)注;“4區(qū)”表示儀表盤(pán)及附近區(qū)域,用于研究行車(chē)過(guò)程中對(duì)車(chē)輛速度、發(fā)動(dòng)機(jī)轉(zhuǎn)速等信息的關(guān)注;“5區(qū)”表示前方道路區(qū)域中除道路中心區(qū)域以外其他區(qū)域,用于研究駕駛?cè)藢?duì)相鄰車(chē)道、前方道路標(biāo)志標(biāo)牌信號(hào)燈等的關(guān)注;“6區(qū)”表示車(chē)內(nèi)其他區(qū)域,用于研究駕駛?cè)藢?duì)中控臺(tái)等區(qū)域的關(guān)注。
2.2 區(qū)域的累計(jì)關(guān)注時(shí)間分析
依據(jù)本文的注視區(qū)域劃分方法,駕駛?cè)俗⒁暩鲄^(qū)域的總時(shí)間所占百分比如表2所示(共23組數(shù)據(jù),24名被試中1名被試數(shù)據(jù)無(wú)效)。Victor等[10]的研究中指出PRC對(duì)視覺(jué)任務(wù)和聽(tīng)覺(jué)任務(wù)非常敏感,通常視覺(jué)任務(wù)導(dǎo)致注視點(diǎn)更加分散,而聽(tīng)覺(jué)任務(wù)則使駕駛?cè)说淖⒁朁c(diǎn)更聚焦于道路中心。表2中對(duì)1區(qū)的關(guān)注情況即表示PRC值,隨著認(rèn)知分心等級(jí)的增加,PRC值呈現(xiàn)出明顯的增加趨勢(shì)。說(shuō)明認(rèn)知分心后,為了保證安全駕駛,駕駛?cè)舜蟛糠值哪抗舛季劢褂诘缆分行母浇?/p>
表2 各區(qū)域累計(jì)關(guān)注時(shí)間百分比
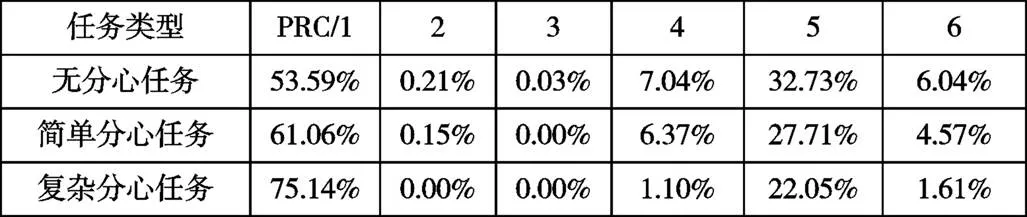
通過(guò)表2分析發(fā)現(xiàn),不管駕駛?cè)擞袩o(wú)認(rèn)知分心,其絕大部分的時(shí)間都在關(guān)注前方道路,從而獲取道路環(huán)境信息。隨著認(rèn)知分心等級(jí)的增加,駕駛?cè)岁P(guān)注道路前方的時(shí)間也增加,PRC值也呈現(xiàn)出同樣的規(guī)律,隨著認(rèn)知負(fù)荷增加,比例顯著提高。而研究對(duì)后視鏡和儀表盤(pán)的關(guān)注情況發(fā)現(xiàn),隨著認(rèn)知負(fù)荷的增加,關(guān)注的時(shí)間比例顯著下降,說(shuō)明認(rèn)知分心后,駕駛?cè)撕鲆暳藢?duì)車(chē)速的關(guān)注。駕駛?cè)说恼J(rèn)知注意力資源是有限的,認(rèn)知分心嚴(yán)重分散了駕駛?cè)说恼J(rèn)知注意力,導(dǎo)致駕駛?cè)颂幚矶嗳蝿?wù)能力下降。
2.3 視覺(jué)搜索廣度
搜索廣度表示的是水平、垂直方向上的視覺(jué)搜索范圍,垂直及水平方向視角的標(biāo)準(zhǔn)差作為評(píng)價(jià)搜索廣度的指標(biāo),用于反映行車(chē)過(guò)程中駕駛?cè)艘暯欠植嫉碾x散程度。為了獲取更多的環(huán)境信息,駕駛?cè)吮仨殧U(kuò)大自己的搜索范圍,相應(yīng)的視角標(biāo)準(zhǔn)差的值也就越大,試驗(yàn)采集的24名被試數(shù)據(jù)均有效。
如圖4所示,無(wú)分心任務(wù)時(shí)的值明顯高于認(rèn)知分心后的值,而不同分心等級(jí)對(duì)駕駛?cè)舜怪狈较虻囊暯菢?biāo)準(zhǔn)差影響不明顯。對(duì)無(wú)分心任務(wù)和簡(jiǎn)單分心任務(wù)時(shí)的視角標(biāo)準(zhǔn)差進(jìn)行獨(dú)立樣本T檢驗(yàn),發(fā)現(xiàn)伴隨概率p=0.004<0.05,表明無(wú)分心任務(wù)時(shí)的視角標(biāo)準(zhǔn)差顯著高于執(zhí)行簡(jiǎn)單分心任務(wù)時(shí)的值,也說(shuō)明無(wú)分心任務(wù)下駕駛?cè)舜怪狈较蛏系乃阉鞣秶鼜V。如圖5所示,復(fù)雜分心任務(wù)下,駕駛?cè)怂椒较虻乃阉鞣秶^小,而執(zhí)行簡(jiǎn)單分心任務(wù)和無(wú)分心任務(wù)相比,水平方向搜索范圍基本無(wú)差別。將無(wú)分心任務(wù)、簡(jiǎn)單分心任務(wù)分別與復(fù)雜分心任務(wù)下的水平視角標(biāo)準(zhǔn)差進(jìn)行獨(dú)立樣本T檢驗(yàn),都得出伴隨概率p=0.005<0.05,說(shuō)明無(wú)分心任務(wù)與簡(jiǎn)單分心任務(wù)時(shí)的水平視角標(biāo)準(zhǔn)差顯著高于復(fù)雜分心任務(wù)時(shí)的值。
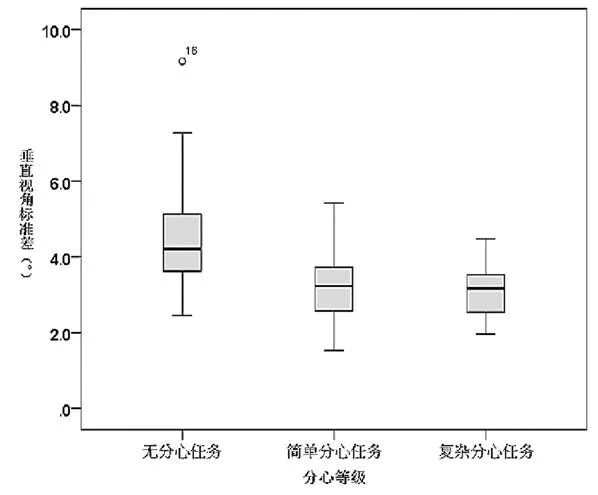
圖4 垂直視角標(biāo)準(zhǔn)差
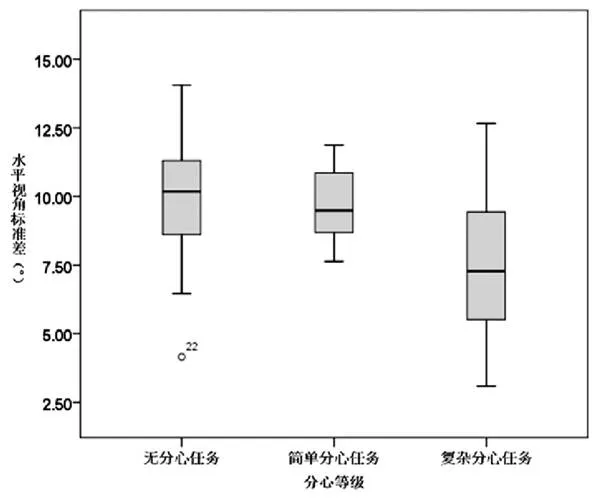
圖5 水平視角標(biāo)準(zhǔn)差
3 駕駛?cè)藪咭曅袨檠芯?/h2>
縱觀整個(gè)行車(chē)過(guò)程,用于掃視行為的時(shí)間總占比僅為15%左右,但掃視行為發(fā)揮著關(guān)鍵性的作用。為獲取更多的環(huán)境信息,駕駛?cè)诵枰蠓秶目焖偎阉鳎捎跍y(cè)試精度要求比較高,有效數(shù)據(jù)僅為18組。
3.1 峰值掃視速度
峰值掃視速度為一次掃視行為中跨度最大的兩個(gè)采樣點(diǎn)對(duì)應(yīng)速度值。正常駕駛時(shí)的峰值掃視速度為3040o/s,簡(jiǎn)單分心任務(wù)時(shí)為4349o/s,復(fù)雜分心任務(wù)時(shí)為3848o/s。分心后的注視目標(biāo)更明確,視線進(jìn)行大范圍轉(zhuǎn)移時(shí)不會(huì)留意目標(biāo)之間是否存在其他感興趣的目標(biāo)。然而,在無(wú)分心任務(wù)時(shí)駕駛?cè)俗⒁暷繕?biāo)并不很明確,在進(jìn)行視線轉(zhuǎn)移時(shí)會(huì)被注視目標(biāo)之間的其他事物干擾,從而峰值掃視速度較低。
3.2 掃視頻率
不同等級(jí)認(rèn)知次任務(wù)下駕駛?cè)说膾咭曨l率統(tǒng)計(jì)如圖6所示,認(rèn)知分心后的掃視頻率四分位數(shù)、中位數(shù)均高于正常駕駛階段的對(duì)應(yīng)值。而簡(jiǎn)單分心任務(wù)下的掃視頻率分布又略高于復(fù)雜分心任務(wù)下的值。說(shuō)明駕駛?cè)苏J(rèn)知分心占據(jù)了一部分認(rèn)知資源,獲取目標(biāo)相關(guān)信息的能力下降,通過(guò)增加掃視目標(biāo)的頻率以獲取相關(guān)信息。而隨著認(rèn)知分心等級(jí)的增加,占用了更多的認(rèn)知資源,駕駛?cè)瞬坏貌环艞墝?duì)一些目標(biāo)的觀察,從而降低了掃視頻率。
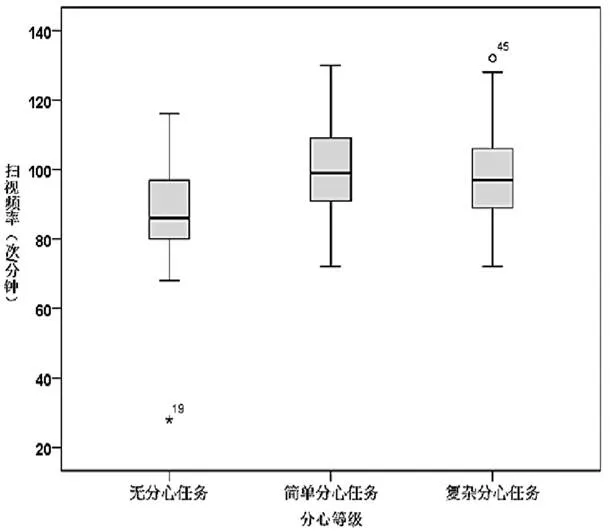
圖6 不同等級(jí)認(rèn)知分心次任務(wù)掃視頻率分布
3.3 掃視幅度
定義5~15°區(qū)間內(nèi)的掃視為低幅度掃視,15~30°為中幅度掃視,30°以上為大幅度掃視,如圖7所示。無(wú)論駕駛?cè)擞袩o(wú)分心任務(wù),其掃視行為以低幅和中幅掃視為主。認(rèn)知分心后,駕駛?cè)说头葤咭曅袨闀r(shí)間增加,說(shuō)明駕駛?cè)嗽黾恿说头鹊乃阉黝l次,這可能是因?yàn)轳{駛?cè)苏J(rèn)知分心后,其中一部分注意力資源用于分心任務(wù),剩余資源不足以處理大范圍掃視時(shí)獲取的信息,這是一種認(rèn)知分心補(bǔ)償機(jī)制。
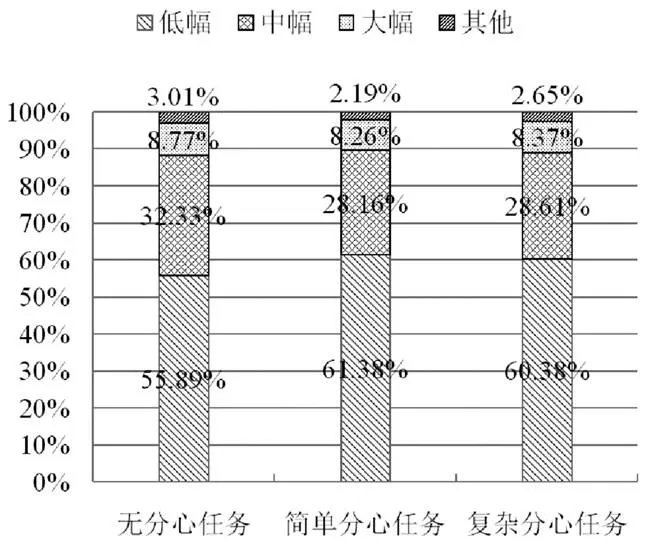
圖7 不同認(rèn)知分心等級(jí)駕駛?cè)藪咭曅袨榻y(tǒng)計(jì)
3.4 平均掃視速度
平均掃視速度定義為掃視幅度與掃視持續(xù)時(shí)間的比值,單位為o/s。掃視平均速度能夠說(shuō)明前一次注視過(guò)程中信息加工的速度以及被試者尋找下一個(gè)目標(biāo)的速度。分別統(tǒng)計(jì)駕駛?cè)藷o(wú)分心任務(wù)、簡(jiǎn)單分心任務(wù)、復(fù)雜分心任務(wù)對(duì)應(yīng)的平均掃視速度,如圖8所示。無(wú)論駕駛?cè)擞袥](méi)有參與認(rèn)知分心活動(dòng),可以認(rèn)為平均掃視速度主要分布于50o/s~300o/s之間。其中,在50~100o/s和150~300o/s的這4個(gè)區(qū)段內(nèi),駕駛?cè)藷o(wú)論執(zhí)行簡(jiǎn)單分心任務(wù)還是復(fù)雜分心任務(wù)時(shí)的平均掃視速度分布頻次百分比均與無(wú)認(rèn)知分心次任務(wù)時(shí)的值相當(dāng)。唯有在100~150o/s的區(qū)段內(nèi),簡(jiǎn)單分心任務(wù)和復(fù)雜分心任務(wù)時(shí)的頻次百分比高于無(wú)任務(wù)時(shí)的頻次百分比,而隨著認(rèn)知分心等級(jí)的增加,頻次百分比出現(xiàn)了一定的降幅。
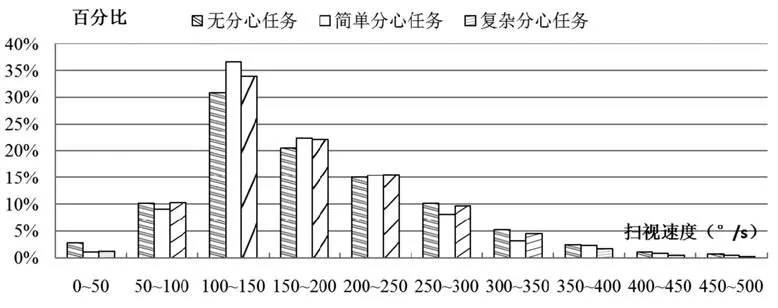
圖8 不同認(rèn)知分心等級(jí)駕駛?cè)似骄鶔咭曀俣冉y(tǒng)計(jì)
4 駕駛?cè)苏Q坌袨檠芯?/h2>
由試驗(yàn)得出24組數(shù)據(jù),可用于眨眼行為研究的有20組。如圖10所示,可知隨著任務(wù)難度的增加,眨眼頻率顯著增加。對(duì)無(wú)分心任務(wù)和復(fù)雜分心任務(wù)以及簡(jiǎn)單分心任務(wù)和復(fù)雜分心任務(wù)時(shí)的眨眼頻率進(jìn)行獨(dú)立樣本T檢驗(yàn),得出伴隨概率分別為P=0.002<0.05和P=0.001<0.05,表明復(fù)雜分心任務(wù)下的眨眼頻率顯著高于無(wú)分心任務(wù)和簡(jiǎn)單分心任務(wù)時(shí)的眨眼頻率,認(rèn)知分心后眨眼頻率分布更集中。
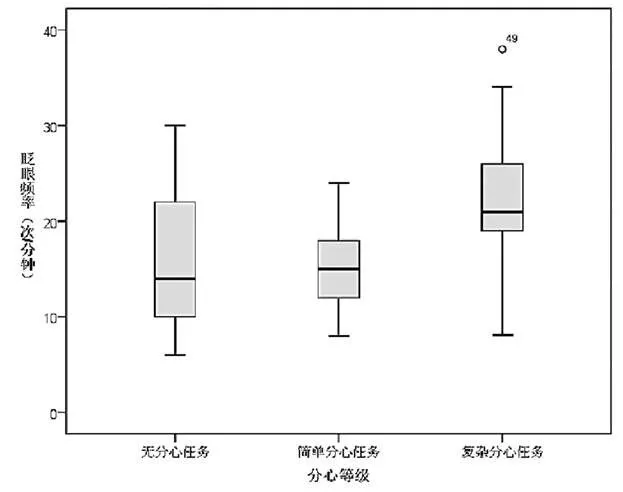
圖9 不同認(rèn)知分心等級(jí)下的眨眼頻率
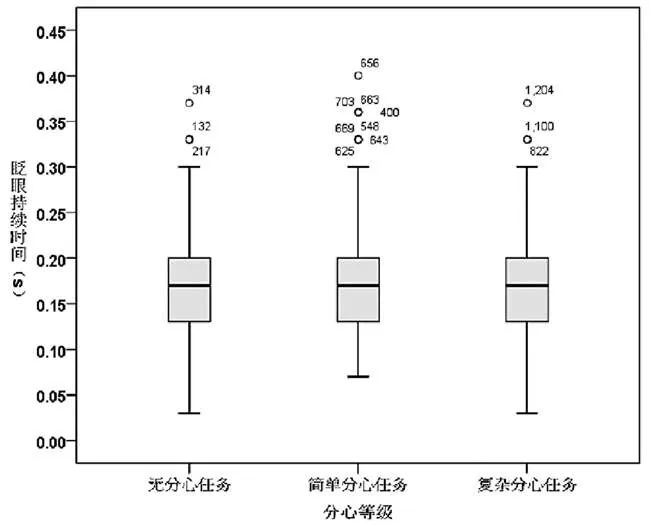
圖10 眨眼持續(xù)時(shí)間分布
分析圖9可知,不同認(rèn)知分心等級(jí)下受試者的眨眼時(shí)間分布大致相當(dāng),主要分布于0.13~0.2s的時(shí)間范圍內(nèi),上邊緣的值基本在同一水平。如圖10所示可知,正常駕駛情況下,眨眼持續(xù)時(shí)間均值為0.176s,做簡(jiǎn)單計(jì)算題和復(fù)雜計(jì)算題的均值分別為0.177s和0.171s,基本上無(wú)差異。說(shuō)明同種類(lèi)型不同等級(jí)的認(rèn)知分心次任務(wù)對(duì)駕駛?cè)苏Q鄢掷m(xù)時(shí)間基本沒(méi)有影響。
5 結(jié)論
對(duì)駕駛?cè)嗽谕瓿刹煌瑥?fù)雜度的認(rèn)知次任務(wù)時(shí)的視覺(jué)特性指標(biāo)數(shù)據(jù)分析后,得到以下結(jié)論:
(1)駕駛?cè)苏J(rèn)知分心后眨眼頻率分布更集中,復(fù)雜分心任務(wù)下的眨眼頻率顯著高于正常駕駛和簡(jiǎn)單分心任務(wù)下的值。不同等級(jí)的認(rèn)知分心次任務(wù)對(duì)駕駛?cè)苏Q鄢掷m(xù)時(shí)間基本沒(méi)有影響。
(2)增加認(rèn)知分心任務(wù)以后,駕駛?cè)嗽黾恿诵》鹊乃阉黝l次而減少了大幅度的搜索頻次。
(3)與正常情況相比,駕駛?cè)俗龊?jiǎn)單分心時(shí)平均掃視速度在100~150o/s范圍內(nèi)的頻次百分比增加了約5%,而隨著分心任務(wù)難度的增加,該區(qū)段的頻次百分比又出現(xiàn)了一定的降幅。
(4)無(wú)論有無(wú)認(rèn)知分心,絕大部分的時(shí)間都在關(guān)注前方道路。隨著認(rèn)知分心次任務(wù)難度的增加,駕駛?cè)岁P(guān)注道路前方的時(shí)間有所增加,尤其是在進(jìn)行復(fù)雜運(yùn)算時(shí),幾乎全部時(shí)間都用于看前方道路。
(5)正常情況下駕駛?cè)舜怪狈较蛏系乃阉鞣秶黠@大于認(rèn)知分心后的搜索范圍。水平方向上僅在做復(fù)雜分心任務(wù)時(shí)搜索范圍顯著縮小。
(6)復(fù)雜分心任務(wù)時(shí),組合視角標(biāo)準(zhǔn)差明顯低于正常駕駛和簡(jiǎn)單分心任務(wù)時(shí)的值,說(shuō)明復(fù)雜分心任務(wù)下,駕駛?cè)说目臻g搜索范圍顯著縮小了。
[1] 馬勇,付銳,袁鈺,等.基于駕駛?cè)朔中挠绊懗潭鹊鸟{駛分心任務(wù)評(píng)級(jí)[J].交通信息與安全,2014, 032(005): 47-51+57.
[2] Lamble D,Kauranen T, Laakso M, et al. Cognitive load and detection thresholds in car following situations: safety implications for using mobile (cellular) telephones while driving[J].Accident Analysis & Prevention,1999, 31(6):617-623.
[3] Patten C J D,Kircher A,?stlund J, et al.Using mobile telephones: cognitive workload and attention resource allocation[J].Accident analysis & prevention, 2004, 36(3):341-350.
[4] Harbluk J L,Noy Y I,Eizenman M.The impact of cognitive distrac -tion on driver visual behaviour and vehicle control[R].2002.
[5] 吳付威,黎莉,付銳.城市道路干擾跟車(chē)對(duì)駕駛?cè)俗⒁饬Ψ峙涞挠绊慬J].重慶交通大學(xué)學(xué)報(bào)(自然科學(xué)版), 2018, 037(006):87-91.
[6] Harbluk J L,Noy Y I,Eizenman M.The impact of internal distraction on driver visual behavior[J].Retrieved June, 2000,15:2003.
[7] Miyaji M,Kawanaka H,Oguri K.Driver's cognitive distraction detec -tion using physiological features by the adaboost[C]//Intelligent Transportation Systems,2009.ITSC'09.12th International IEEE Con -ference on. IEEE, 2009:1.6.
[8] Strayer D L, Cooper J M, Turrill J, et al. Measuring cognitive distraction in the automobile[J]. 2013.
[9] 馬勇,付銳,孟妮,等.道路環(huán)境對(duì)駕駛?cè)搜蹌?dòng)行為影響的試驗(yàn)研究[J].交通運(yùn)輸系統(tǒng)工程與信息, 2015(03):86-92.
[10] Victor T W,Harbluk J L, Engstr?m J A. Sensitivity of eye.movement measures to in.vehicle task difficulty[J].Transportation Research Part F:Traffic Psychology and Behaviour,2005,8(2):167-190.
Analysis Of Driver’s Eye Movement Behavior Detection Technology In Domestic Automobile Market
Niu Zengliang, Meng Deyu, Wang Guangyao
( China Automotive Technology and Research Center Co., Ltd., Tianjin 300300 )
In order to study the drivers' eyes movement under the different level of cognitive distraction,the method of mathematical statistics was used to investigate the contrast analysis of eye movement index, when drivers complete different complexity of cognitive secondary tasks on the real vehicle road test, and do a quantitative research of variation to the drivers' blink, scanning and watched under the different level of cognitive distraction. The results show that the correlation is significant among the cognitive task complexity, blink frequency, saccade amplitude and the breadth of view .It is concluded that with the increase of cognitive secondary task difficulty, drivers' blink rate increased significantly, the search scope narrowed considerably, the fixation point distribution is more concentrated. Research of this paper provides theoretical support to the development of driving assistance systems which is based on eye movement behavior.
Real vehicle test; Cognitive distraction; Scanning behavior; Gaze behavior
10.16638/j.cnki.1671-7988.2021.07.035
U491
A
1671-7988(2021)07-107-05
U491
A
1671-7988(2021)07-107-05
牛增良,碩士,工程師,就職于中國(guó)汽車(chē)技術(shù)研究中心有限公司,研究方向:交通安全。
猜你喜歡
體育科技文獻(xiàn)通報(bào)(2022年3期)2022-05-23 13:46:54
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
天津外國(guó)語(yǔ)大學(xué)學(xué)報(bào)(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機(jī)設(shè)計(jì)與研究(2019年4期)2019-05-21 07:21:24
汽車(chē)工程學(xué)報(bào)(2017年2期)2017-07-05 08:13:02
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
- 汽車(chē)實(shí)用技術(shù)的其它文章
- 淺談汽車(chē)外飾塑料件設(shè)計(jì)缺陷
- 基于人性化設(shè)計(jì)的汽車(chē)銷(xiāo)售展廳設(shè)計(jì)探討
- 高壓共軌噴油器內(nèi)部升程的測(cè)量與調(diào)整
- 汽車(chē)底盤(pán)的維修和保養(yǎng)
- “互聯(lián)網(wǎng)+”信息化教育背景下高校教師角色定位與課程改革探析——以《高校汽車(chē)電控技術(shù)課程改革》為例
- 1+X證書(shū)制度下汽車(chē)運(yùn)用與維修技術(shù)專(zhuān)業(yè)實(shí)訓(xùn)資源建設(shè)路徑探析