布站方式對基于TDOA的干擾源定位影響分析
2021-04-16 13:07:42胡人丹
導航定位與授時 2021年2期
胡人丹,常 青
(北京航空航天大學電子信息工程學院,北京 100083)
0 引言
隨著無線電技術的發展,電子信息戰是當代社會戰爭的重要組成部分,如何識別和定位各種干擾成為了影響戰局的關鍵性因素[1]。定位通常分為有源定位和無源定位,有源定位是指系統自身發射信號,并通過信號的反射實現定位的方式;無源定位是在不發射電磁波的情況下,通過接收干擾源發射的信號實現定位的方式。無源定位技術與有源定位相比,擁有良好的隱蔽性,以及較強的戰場生存能力。
常用的無源定位技術有基于交叉測角(Angle of Arrival,AOA)的定位技術、基于到達時間(Time of Arrival,TOA)的定位技術[2]、基于到達頻率差(Frequency Difference of Arrival,FDOA)的定位技術[3]和基于信號到達時間差(Time Difference of Arrival,TDOA)的定位技術[4-5]。TDOA定位技術基于輻射源信號到達各接收站的時間差,一般需要多個接收站測量同一個輻射源信號的到達時間。通過信號到達的時間差可以計算出距離差,當距離差為一個常數時,輻射源與接收站之間的位置關系就滿足一個雙曲線(面)方程[6]。在二維平面中,至少需要3個接收站才能計算出2個時間差,2個時間差就能得到2條雙曲線,而雙曲線的交點就是輻射源的位置。在三維空間中,至少需要4個接收站才能對干擾源進行定位。雙曲線定位方法是一種較為精確的定位方法[7],但也存在一些缺點,如當2條雙曲線的交點不止一個時,就出現了模糊解問題。
在TDOA定位方式中,布站方式對模糊解區域的分布以及定位精度的影響很大[8]。在二維平面中,接收站之間的基線長度和接收站之間的角度對模糊區域分布具有較大影響。在三維立體空間中,接收機布站的形狀和基線長度對幾何精度因子(Geometric Dilution of Precision,GDOP)也有較大影響[9]。
本文針對TDOA定位方法中的布站問題,在二維平面對模糊區域進行仿真,得到了模糊解區域分布與接收站布站之間的關系。通過公式推導可以得出接收站的布站方式對TDOA系統的定位精度有較大的影響。為了定量分析不同的布站情況對TDOA定位精度的影響,本文對四站三維接收站進行了不同形狀的布站并進行了仿真驗證。仿真結果對實際工程應用中的TDOA布站有較強的借鑒意義。
1 TDOA定位原理
1.1 TDOA定位算法
多站時差定位算法要在空間中對輻射源進行定位,至少需要3個方程形成3個雙曲面,這就至少需要4個接收站同步完成輻射源信號TDOA的測量,定位原理如圖1所示。4個接收站中包括1個主站和3個輔站。
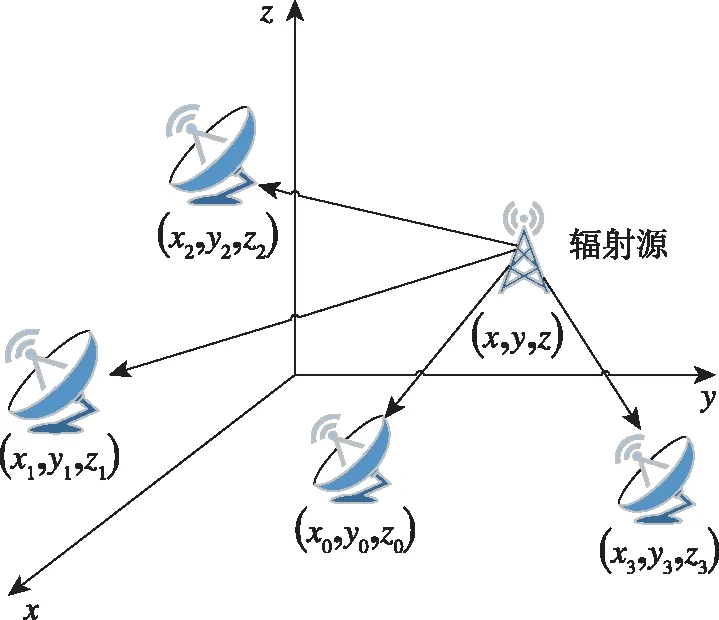
圖1 基于TDOA的無源定位系統示意圖Fig.1 Schematic diagram of passive location system based on TDOA
設待定的目標位置為(x,y,z)T,主站坐標為 (x0,y0,z0)T,輔站坐標為(xi,yi,zi)T(i=1,2,3),r0表示目標到主站的距離,ri表示目標到各測量輔站的距離。目標到主站距離與到輔站距離的距離差為Δri,那么可得定位方程
(1)
式中,c為電波傳播速度;Δti為目標信號到達第i個輔站與到達主站之間的時間差測量值;cΔti為第i個輔站到主站的距離差測量值。式(1)為一組關于目標輻射源位置坐標(x,y,z)的非線性方程組,目前有很多文獻研究了關于這個方程組的解法,如Chan氏算法[10]、泰勒級數展開法[11]、球面相交法[12]和去距離最小二乘法[13]等。其中Chan氏算法是求解雙曲線方程組的一種具有解析表達式解的非遞歸算法,該算法的特點是計算量小,無需做迭代運算,并可得到較好的定位結果。
1.2 Chan氏算法定位模型
利用Chan氏算法對式(1)整理化簡可得
(x0-xi)x+(y0-yi)y+(z0-zi)z=ki+r0Δri
(2)
其中

(3)
為求解這個方程組式,可先將r0看作一個已知量,因此可得如下矩陣表達式
AX=F
(4)
其中
(5)
X=[xyz]T
(6)
(7)
在合適的布置接收站的位置條件下,即主站與任意2個輔站不在一條直線上時,rank(A)=3,用偽逆法求解方程(4),可以得到
(8)
令
(9)
由式(8)可得
(10)
其中
(11)
在這里為了方便計算,假設x0=y0=z0=0,即參考主站的坐標在原點。此時式(4)中的
(12)
(13)
其中
(14)
此時x、y、z的解為
(15)
其中
(16)
因為主站在坐標原點,因此可以得到
(17)
將式(15)代入式(17)得
(18)
其中
(19)
由式(18)可解得r0的2個根
(20)
將r0代入式(1),即可得到目標點的坐標(x,y,z)。
2 GDOP定位精度分析
2.1 GDOP定位精度模型
對Δri=ri-r0兩邊同時取微分
dΔri=(Hix-H0x)dx+(Hiy-H0y)dy+
(Hiz-H0z)dz+(ki-k0), (i=1,2,3)
(21)
其中
(22)
ki=Hixdxi+Hiydyi+Hizdzi, (i=0,1,2,3)
(23)
寫成矢量形式為
dΔR=HdR+dS
(24)
其中主站與各輔站TDOA測量引入的誤差為
dΔR=[dΔr1dΔr2dΔr3]T
(25)
欲求的目標定位誤差為
dR=[dxdydz]T
(26)
各站站址引入的測量誤差為
dS=[k1-k0k2-k0k3-k0]T
(27)
其中
(28)
由式(28)可得定位誤差估計值的最小二乘解
(29)
由式(29)可知,目標定位誤差(dxdydz)T與時差測量誤差dΔR、站址測量誤差dS及目標相對各站位置有關。由于各時間差測量信息中都包含有主站測量信息,即各時間差誤差中都包含有共同的誤差因素,因此各Δri的測量誤差是相關的[14]。設Δri測量誤差經系統修正后是零均值的,而站址誤差在每次測量中是保持不變的,且站址誤差各元素之間及各站址誤差間互不相關,則定位誤差協方差為
Pdr=E[dRdRT]
=C{E[dΔRdΔRT]+E[dSdST]}CT
(30)
式中
C=(HTH)-1HT=[cij]3×3
(31)
E[dΔRdΔRT]=
(32)
E[dSdST]=
(33)
其中,σΔri為第i個輔站與主站之間的測量誤差標準差;ηij表示Δri與Δrj之間的相關系數
(34)
σxi、σyi、σzi為各站址測量誤差分量的標準差。假設各站址測量誤差標準差相同,即
(35)
又因為
(36)
可得
(37)
令
[eij]3×3=E[dΔrdΔrT]+E[dSdST]
(38)
[eij]3×3=
(39)
[eij]3×3=
(40)
由此可得定位誤差在x、y、z上的方差分別為
(41)
則
(42)
2.2 定位無解區與定位模糊區原因分析
對關于r0的一元二次方程ar02+br0+c=0進行求解,可以得到r0的數值解。根據一元二次方程的特點,可以從解的情來進行分析[15]。
1)Δ=b2-4ac<0時,方程的解為2個虛數,方程無實數解,無法準確定位。
2)Δ=b2-4ac=0時,方程有唯一解,能夠準確定位且定位結果唯一。
3)Δ=b2-4ac>0時,方程有2個解r01和r02,此時又可以分為以下兩種情況:
(1)r01r02<0,取r01和r02中正值為定位結果;
(2)r01r02>0,若r01和r02都為正,則此時出現了定位模糊,需要借助一定手段來消除定位模糊。
在實際系統中,由于噪聲干擾、多路徑傳輸和信道環境惡劣等原因導致的時差測量誤差不可避免。時差測量誤差使原本相交的雙曲線出現偏移,進而導致出現無解情況。
3 仿真驗證
3.1 平面三站系統模糊度仿真
如圖2所示,以主站S0為坐標原點建立坐標系,輔站S1到主站S0之間的距離為L1,輔站S2到主站S0之間的距離為L2。L1與L2之間的夾角為θ,L1和L2的長度為基線長度。
對圖2所示的時差定位系統在不同布站形式下的模糊度進行仿真,分別將夾角設置為60°、90°和120°,同時改變基線長度,設置坐標如表1所示。仿真假設X、Y坐標范圍均為[-200,200],單位為km,仿真結果如圖3~圖8所示。

表1 不同條件下接收站位置坐標
圖3和圖4為夾角60°時基線長度分別為10km和20km布站條件下的模糊區域分布情況;圖5和圖6為夾角90°時基線長度分別為10km和20km布站條件下的模糊區域分布情況;圖7和圖8為夾角120°時基線長度分別為10km和20km布站條件下的模糊區域分布情況,圖中藍色的點為定位模糊點。通過對比圖3和圖4可以得到,基線長度增加,模糊區域減小;通過對比圖3、圖5和圖7可
以得到,模糊區域主要分布在基線延長線及其夾角區域。接收站輔站與主站形成的夾角增大,則主站上方的無模糊區域增加,主站下方延長線形成的模糊區域也增加。

圖3 夾角為60°基線長度為10km的模糊區Fig.3 Fuzzy area with the included angle of 60 degrees and the baseline length of 10km
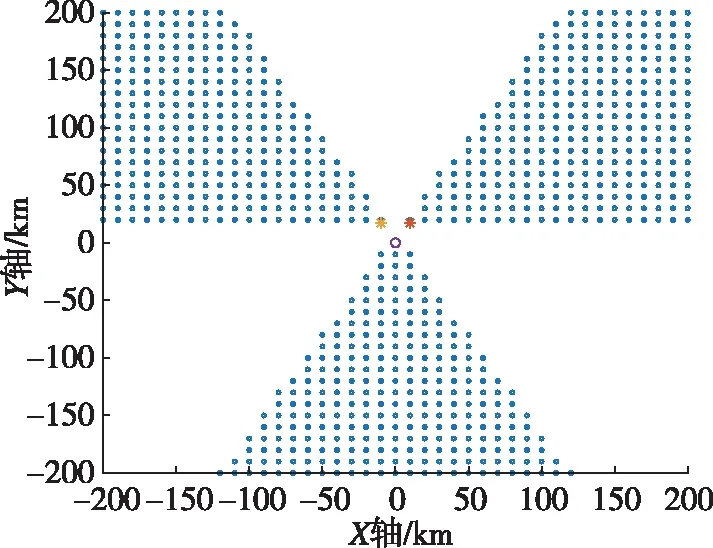
圖4 夾角為60°基線長度為20km的模糊區Fig.4 Fuzzy area with the included angle of 60 degrees and the baseline length of 20km

圖5 夾角為90°基線長度為10km的模糊區Fig.5 Fuzzy area with the included angle of 90 degrees and the baseline length of 10km

圖6 夾角為90°基線長度為20km的模糊區Fig.6 Fuzzy area with the included angle of 90 degrees and the baseline length of 20km

圖7 夾角為120°基線長度為10km的模糊區Fig.7 Fuzzy area with the included angle of 120 degrees and the baseline length of 10km

圖8 夾角為120°基線長度為20km的模糊區Fig.8 Fuzzy area with the included angle of 120 degrees and the baseline length of 20km
3.2 四站三維系統精度仿真
決定定位精度大小的因素包括:站址測量誤差標準差、各接收站與目標輻射源的幾何位置、接收站的布站方式和時差測量誤差標準差等。其中對定位精度影響最大的因素是各接收站與目標輻射源之間的幾何位置關系[16]。通過觀察GDOP的表達式可以看出,GDOP的物理意義為3個坐標軸方向上的測量誤差,因此GDOP越小,誤差越小,測量精度越高。下面對三種最常見的布站方式進行GDOP仿真,這三種布站方式分別是:菱形、Y形和T形。各站坐標如表2所示。

表2 不同形狀下接收站位置坐標
仿真假設X、Y坐標范圍均為[-300,300],單位為km,時差測量精度固定為10ns,仿真結果如圖9~圖14所示。
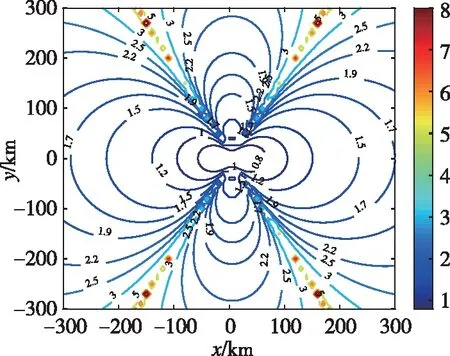
圖9 基線長度為10km菱形布站下的GDOP分布Fig.9 The GDOP distribution under the rhombus station with a baseline length of 10km

圖10 基線長度為20km菱形布站的GDOP分布Fig.10 The GDOP distribution under the rhombus station with a baseline length of 20km

圖11 基線長度為10km Y形布站的GDOP分布Fig.11 The GDOP distribution with a baseline length of 10km Y shaped station

圖12 基線長度為20km Y形布站的GDOP分布Fig.12 The GDOP distribution with a baseline length of 20km Y shaped station

圖13 基線長度為10km T形布站的GDOP分布Fig.13 The GDOP distribution with a baseline length of 10km T shaped station
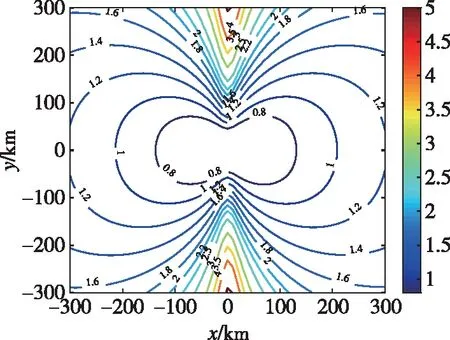
圖14 基線長度為20km T形布站的GDOP分布Fig.14 The GDOP distribution with a baseline length of 20km T shaped station
圖9和圖10分別為基線長度為10km和20km時菱形布站下的GDOP分布,通過觀察可以得到:基線長度越長,在相同坐標點的GDOP越小,定位精度越高。圖11和圖12分別為基線長度為10km和20km時Y形布站下的GDOP分布,圖13和圖14分別為基線長度為10km和20km時T形布站下的GDOP分布,通過對比圖9、圖11和圖12可知,在相同基線長度下,Y形布站各個方向的GDOP分布較為均勻;菱形布站在對角線連線區域定位精度較高,在基線延長線方向定位精度較低;T形布站在三站在同一條延長線方向上的定位精度較高,在其垂直方向定位精度較低。
4 結論
本文針對無源時差定位原理及精度進行了理論分析,仿真了二維不同布站條件下的模糊區域分布,以及四站三維不同布站條件下的GDOP分布。仿真結果表明:
1)二維模糊區域分布由基線長度和基線夾角所決定,模糊區域主要分布在基線延長線夾角區域。
2)通過觀察四站三維不同形狀的接收機布站可以得到,在相同布站形狀下基線長度越長,同樣位置的GDOP越小。在實際布站時,將接收站之間的距離布置的稍微寬一點有利于提高定位精度。
3)在四站三維接收機布站條件下,同樣的基線長度,Y形布站在各個方向的定位精度都較好,且較為均勻;菱形布站在接收站延長線方向的定位精度較好,在接收站延長線夾角方向的定位精度較差;T形布站在三站在同一條延長線方向上的定位精度較好。當不確定輻射源位置時,用Y形布站較為合理。
