基于帶有事件觸發(fā)機(jī)制的集員濾波的RSSI室內(nèi)移動(dòng)定位
2021-04-17 01:59:42王田田
導(dǎo)航定位與授時(shí) 2021年2期
王田田,楊 波
(山西大學(xué)數(shù)學(xué)科學(xué)學(xué)院,太原 030006)
0 引言
近年來,隨著智能手機(jī)和平板電腦等移動(dòng)智能終端的普及,人們對(duì)基于位置服務(wù)的需求日益增長。根據(jù)《室內(nèi)外高精度定位導(dǎo)航白皮書》顯示,導(dǎo)航與位置服務(wù)在新一代信息技術(shù)中具有舉足輕重的地位。調(diào)查顯示,人們80%以上的時(shí)間處于室內(nèi)環(huán)境中(含地下、礦井、隧道、機(jī)場(chǎng)、火車站等),因此室內(nèi)位置服務(wù)具有廣闊的應(yīng)用前景[1]。眾所周知,室外環(huán)境下,以空中衛(wèi)星為基礎(chǔ)的全球?qū)Ш叫l(wèi)星系統(tǒng)(Global Navigation Satellite System,GNSS)被廣泛應(yīng)用且具有極高的精度。然而在室內(nèi)環(huán)境下,由于衛(wèi)星信號(hào)受到建筑物阻隔,導(dǎo)致GNSS信號(hào)快速衰減,使得GNSS無法滿足室內(nèi)定位需求。為了實(shí)現(xiàn)高精度的室內(nèi)定位,基于超寬帶(Ultra Wide Band,UWB)[2]、 無線射頻識(shí)別[3]、WiFi[4]和Zigbee[5]等技術(shù)的各種室內(nèi)定位系統(tǒng)得到了廣泛研究。其中基于接收信號(hào)強(qiáng)度指數(shù)(Received Signal Strength Indicator,RSSI)的WiFi和Zigbee等技術(shù)具有低成本、低功耗、易部署等優(yōu)勢(shì),使得基于RSSI的室內(nèi)定位得到了廣泛關(guān)注。
基于RSSI的距離測(cè)量方法的基本工作原理是利用RSSI值與距離之間存在的關(guān)系。根據(jù)移動(dòng)終端測(cè)量接收到的信號(hào)強(qiáng)度和已知的無線測(cè)距模型,可以估算出收發(fā)方之間的距離。由于無線電信號(hào)在傳輸過程中容易受到環(huán)境的干擾,導(dǎo)致測(cè)量得到的RSSI值含有測(cè)量噪聲,進(jìn)而影響了定位精度。為了降低外界噪聲對(duì)定位結(jié)果的影響, 常采用Kalman濾波[6]和粒子濾波等方法估計(jì)目標(biāo)位置,然而這些方法要求知道噪聲的統(tǒng)計(jì)特性。在許多實(shí)際應(yīng)用中,噪聲信號(hào)多是未知的,但是噪聲的邊界容易獲得,因而可考慮采用集員濾波來處理未知但有界的噪聲[7],且集員濾波可以提供包含目標(biāo)真實(shí)狀態(tài)的集合,使得定位結(jié)果更可靠。
自文獻(xiàn)[8]和文獻(xiàn)[9]提出集員濾波后,集員濾波在理論與應(yīng)用上都引起了很多學(xué)者的注意。文獻(xiàn)[10]采用凸優(yōu)化方法處理范數(shù)有界不確定系統(tǒng)的魯棒集員濾波問題。文獻(xiàn)[11]將集員濾波用于移動(dòng)機(jī)器人定位。文獻(xiàn)[12]解決了一類具有傳感器飽和的離散時(shí)變系統(tǒng)的集員濾波問題。為了減輕通信負(fù)擔(dān),文獻(xiàn)[13]采用事件觸發(fā)通信協(xié)議處理離散非線性系統(tǒng)的分布式集員濾波問題。最近,文獻(xiàn)[14]在基于RSSI的室內(nèi)定位問題中采用了集員濾波算法,然而該文獻(xiàn)僅研究了固定點(diǎn)定位問題,而沒有考慮室內(nèi)環(huán)境下移動(dòng)節(jié)點(diǎn)的定位問題。 因此,本文采用集員濾波估計(jì)移動(dòng)節(jié)點(diǎn)的位置,可以求出包含目標(biāo)真實(shí)位置的區(qū)域,從而得到更可靠的位置估計(jì),并且考慮了事件觸發(fā)機(jī)制以降低節(jié)點(diǎn)的傳輸與計(jì)算負(fù)擔(dān)。
結(jié)合集員濾波的特點(diǎn),本文提出了一種改進(jìn)的橢圓三邊定位算法,克服了由于RSSI測(cè)距誤差導(dǎo)致的三邊定位算法無法獲得可行解的問題,同時(shí)針對(duì)因目標(biāo)移動(dòng)而導(dǎo)致估計(jì)誤差增大的問題,提出了一種錨節(jié)點(diǎn)自主選擇與切換方法。 最后針對(duì)噪聲統(tǒng)計(jì)特性未知的情況,考慮了帶有事件觸發(fā)機(jī)制的集員濾波方法來估計(jì)移動(dòng)目標(biāo)位置,以提高估計(jì)結(jié)果的可靠性,同時(shí)減少不必要的信息傳輸與計(jì)算,節(jié)約通信資源,降低能耗。
1 問題描述
本文研究了無線傳感網(wǎng)絡(luò)(Wireless Sensor Network, WSN)上基于RSSI的室內(nèi)移動(dòng)目標(biāo)的定位問題。傳感網(wǎng)絡(luò)結(jié)構(gòu)如圖1所示,傳感器i可接收來自待測(cè)節(jié)點(diǎn)的信息,也可接收兩個(gè)鄰居節(jié)點(diǎn)j和l的測(cè)量信息。定位系統(tǒng)的狀態(tài)方程可用式(1)描述
xk+1=Akxk+Bkωk+uk
(1)
其中,xk+1∈R2表示系統(tǒng)狀態(tài),也就是移動(dòng)目標(biāo)位置;Ak和Bk是維度匹配的已知矩陣;uk是已知的控制輸入;ωk∈R2是未知但有界的過程噪聲,且滿足
(2)
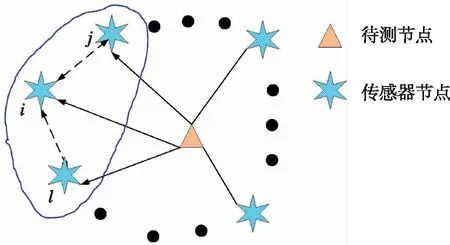
圖1 傳感網(wǎng)絡(luò)結(jié)構(gòu)示意圖Fig.1 Structure of WSN
第i個(gè)傳感器的測(cè)量方程為
(3)
其中,根據(jù)文獻(xiàn)[15]有
(4)

(5)

本文首先使用三邊定位算法求解目標(biāo)位置的初值,然后考慮通過切換傳感器降低由于距離增長RSSI值衰減造成的估計(jì)誤差增大的問題,最后采用集員濾波求解出包含目標(biāo)真實(shí)狀態(tài)的橢球。
2 三邊定位求初值

RSSI=A-10γlgd
(6)
式中,A和γ是與環(huán)境相關(guān)的系數(shù),可通過線性回歸法求得。由此可得
(7)
理想的三邊定位算法是以錨點(diǎn)坐標(biāo)為圓心、錨點(diǎn)到待測(cè)節(jié)點(diǎn)的距離為半徑作圓,三個(gè)圓交于一點(diǎn)。然而,在實(shí)際應(yīng)用中,由于環(huán)境影響,測(cè)量值RSSI可能存在誤差,導(dǎo)致出現(xiàn)三個(gè)圓不交于一點(diǎn)甚至不相交的情況。針對(duì)這一問題,并結(jié)合集員濾波的特點(diǎn),本文提出了一種改進(jìn)的三邊定位算法來計(jì)算集員濾波的初值。 在介紹算法前,先引入需要用到的來自文獻(xiàn)[17]的兩個(gè)引理。

min log detA-1
s.t.λt>0,
t=1,…,m
(8)
然后,根據(jù)q=-A-1b,Q=(ATA)-1可以確定ε(q,Q)。

min log detB-1
s.t.λt>0,
(9)
然后,有Q=BTB。
本文提出的改進(jìn)的三邊定位算法步驟如下:
2)以錨點(diǎn)為圓心、錨點(diǎn)與待測(cè)節(jié)點(diǎn)之間的距離為半徑作圓,三個(gè)圓可分別用式(10)表示
(10)

3)用引理1求出三個(gè)圓兩兩之間并集的最小外包橢圓,即
(11)
(12)
(13)
4)用引理2求出上一步中三個(gè)橢圓交集的體積最大內(nèi)部橢球,即
(14)
(15)
本文所提的三邊定位算法在三圓交于一點(diǎn)、交于一個(gè)區(qū)域或不相交的情況下都可以求出包含待測(cè)節(jié)點(diǎn)真實(shí)狀態(tài)的橢圓。
3 錨節(jié)點(diǎn)切換與選擇機(jī)制
隨著目標(biāo)移動(dòng),待測(cè)目標(biāo)節(jié)點(diǎn)先接近傳感器節(jié)點(diǎn)后逐漸遠(yuǎn)離,從而與當(dāng)前錨節(jié)點(diǎn)之間的距離不斷增大,其相應(yīng)的RSSI值也隨之先增大后衰減,如圖2所示。且根據(jù)式(6)可知,隨著距離的增大,RSSI 值對(duì)距離的改變也越來越不敏感,從而導(dǎo)致測(cè)量誤差增大,因此本文提出了一種根據(jù)RSSI值范圍選擇錨節(jié)點(diǎn)的方法。以錨節(jié)點(diǎn)i為例,RSSI值與目標(biāo)位置之間的關(guān)系為
(16)
從而有
(17)
(18)

圖2 RSSI值變化趨勢(shì)Fig.2 Change of RSSI
根據(jù)式(6),可得RSSI對(duì)距離d的導(dǎo)數(shù)為
(19)
令(RSSI)′<-δ,其中,δ>0為給定閾值,可得
(20)
從而有
(21)
選擇RSSI值滿足式(21)的錨節(jié)點(diǎn)作為下一個(gè)用于測(cè)量的錨節(jié)點(diǎn),從而使RSSI保持在對(duì)距離變化足夠敏感的范圍內(nèi)。
4 基于事件觸發(fā)的集員濾波估計(jì)位置

4.1 節(jié)點(diǎn)i處的本地估計(jì)
(22)
濾波器為
(23)

(24)
其中
(25)
(26)


(27)
其中
1)基于微課的自主學(xué)習(xí):翻轉(zhuǎn)課堂順利實(shí)施的技術(shù)支持就是微課,特別是在實(shí)踐性較強(qiáng)的計(jì)算機(jī)公共類課程中,把微課作為輔助教學(xué)非常便利,學(xué)生可以不受時(shí)間、地點(diǎn)的限制,多次地通過觀看微課進(jìn)行知識(shí)的復(fù)習(xí)和強(qiáng)化。在具體實(shí)現(xiàn)時(shí),根據(jù)不同的課程要求,教師構(gòu)建基于微課的課程自主學(xué)習(xí)平臺(tái),平臺(tái)主要包括以下功能:
(28)
Ξi,i=diag{1-τi,1-τi,2-τi,3,τi,1I,
(29)

定理1的證明如下:
根據(jù)式(22)~式(24)有
(30)
令
(31)
從而有
(32)

(33)
根據(jù)式(32),式(33)可轉(zhuǎn)化為
(34)
(35)
(36)
(37)
(38)
式(38)也等價(jià)于下面更緊湊的形式
(39)
通過使用文獻(xiàn)[18]的Schur complement引理將式(39)轉(zhuǎn)換為式(27),證明完畢。
4.2 基于節(jié)點(diǎn)j的更新估計(jì)

(40)
其中,l為事先設(shè)定的觸發(fā)閾值。

(41)
其中
(42)
(43)
(44)
定理2的證明如下:

(45)
從而可得
(46)
設(shè)
(47)
因此,式(46)可轉(zhuǎn)化為
φy,jξi,j=0
(48)
(49)
根據(jù)定理1有
(50)
因此可得
(51)
即
(52)
因此,式(49)可轉(zhuǎn)化為
(53)
(54)
(55)
通過S-Procedure可得式(48)和式(53)~式(55)的等價(jià)形式
(56)
式(56)等價(jià)于

(57)
使用Schur complement引理可將式(57)轉(zhuǎn)化為式(41),證畢。
基于鄰居節(jié)點(diǎn)l的信息交互估計(jì)與基于鄰居節(jié)點(diǎn)j的信息交互過程類似,此處省略。
5 仿真驗(yàn)證
5.1 三邊定位
考慮一個(gè)基于RSSI的室內(nèi)定位系統(tǒng),其中三個(gè)錨點(diǎn)坐標(biāo)分別為[1,2],[2,1],[2.5,3],待測(cè)節(jié)點(diǎn)坐標(biāo)為[2,2],三圓相交于一點(diǎn)、相交于一個(gè)區(qū)域,以及不相交情況下,采用本文所提三邊定位算法求出的結(jié)果分別如圖3所示。 圖中藍(lán)色細(xì)實(shí)線圓表示以錨點(diǎn)為圓心、錨點(diǎn)與待測(cè)點(diǎn)距離為半徑所作的圓,黑色虛線橢球表示三個(gè)圓兩兩之間交集最小的外包橢球,紫紅色粗實(shí)線圓表示最后結(jié)果。
圖3(a)展示了三個(gè)圓不相交的情況下仍然可以獲得可行解,所得橢球的中心點(diǎn)為[1.7256,1.8356],用橢球中心點(diǎn)與待測(cè)節(jié)點(diǎn)之間的距離差表示估計(jì)誤差,這種情況下所得的估計(jì)誤差為0.3199m。 圖3(b)是三圓交于一個(gè)區(qū)域的情況, 所得橢球的中心點(diǎn)為[1.6236,1.7622],因此誤差為0.4452m。 圖3(c)是三圓交于一點(diǎn)的情況,求出的橢球中心點(diǎn)為[1.6918,1.8376],誤差為0.3483m。
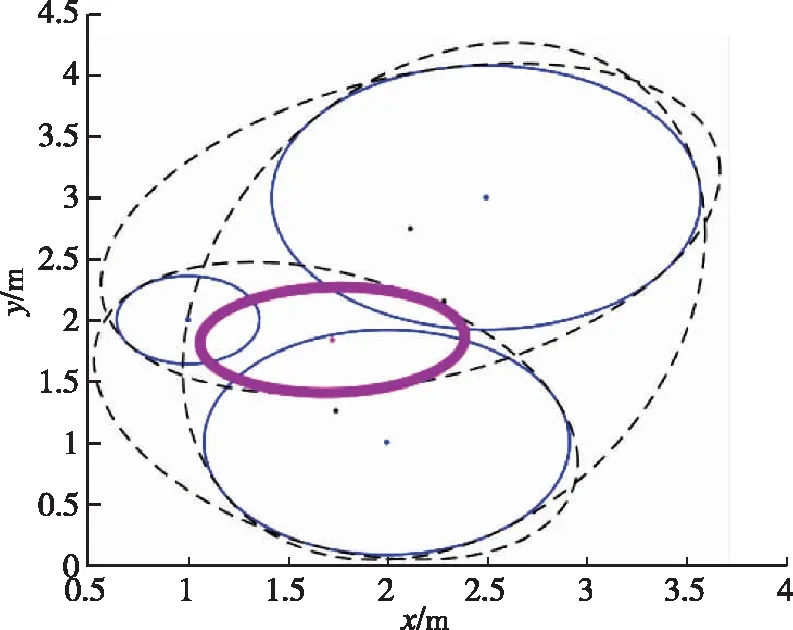
圖3(a) 三圓不相交情況Fig.3(a) Three circles without intersection
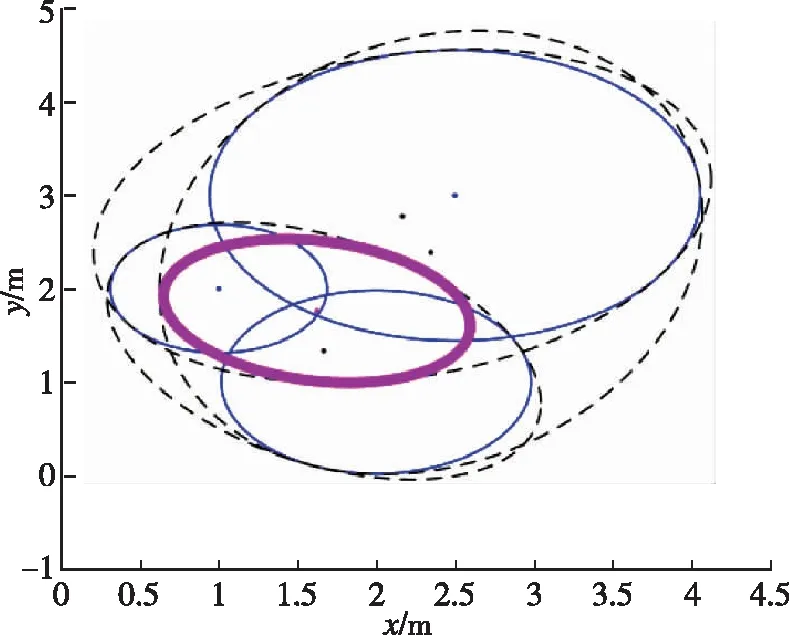
圖3(b) 三圓相交一個(gè)區(qū)域情況Fig.3(b) Three circles intersect
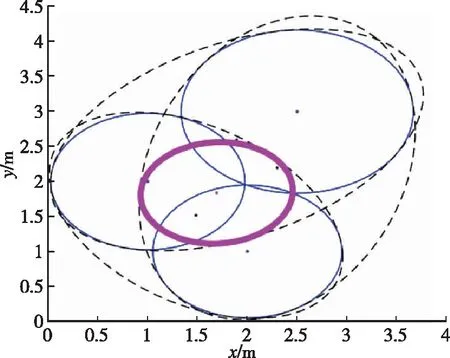
圖3(c) 三圓相交一個(gè)點(diǎn)情況Fig.3(c) Three circles intersect at a point
總之,本文所提三邊定位算法在各種情況下都可以求出包含真實(shí)狀態(tài)的橢球,為之后的集員濾波算法提供了一個(gè)良好的基礎(chǔ)。
5.2 集員濾波
考慮一個(gè)基于RSSI的室內(nèi)動(dòng)態(tài)目標(biāo)跟蹤系統(tǒng),其狀態(tài)方程為
xk+1=xk+ωk+uk
(58)
其中,uk=[0.1,0.1]T是控制輸入;xk=[xk,yk]T是目標(biāo)位置坐標(biāo);過程噪聲ωk=0.05sin(k)。
第i個(gè)傳感器的測(cè)量方程為
(59)


基于上述參數(shù),在不使用錨節(jié)點(diǎn)切換方法前,使用本文提出的集員濾波估計(jì)目標(biāo)位置的仿真結(jié)果如圖4(a)和4(b)所示,使用錨節(jié)點(diǎn)切換后的估計(jì)橢球如圖4(c)所示。估計(jì)誤差用真實(shí)狀態(tài)與估計(jì)橢球中心之間的距離差來表示。從圖4可以看出,在使用錨節(jié)點(diǎn)切換與不使用錨節(jié)點(diǎn)切換兩種情況下,目標(biāo)真實(shí)狀態(tài)都始終位于估計(jì)橢球中。從圖5可以看出,隨著目標(biāo)逐漸遠(yuǎn)離初始傳感器節(jié)點(diǎn),無錨節(jié)點(diǎn)切換且只有三個(gè)錨節(jié)點(diǎn)的情況下橢球尺寸逐漸增大,當(dāng)使用九個(gè)錨節(jié)點(diǎn)時(shí),橢球尺寸比無錨節(jié)點(diǎn)切換情況下使用三個(gè)錨節(jié)點(diǎn)時(shí)的橢球尺寸小,但計(jì)算量大幅增加;而有錨節(jié)點(diǎn)切換的情況下,每次只使用三個(gè)錨節(jié)點(diǎn)的測(cè)量值就能使橢球尺寸比使用九個(gè)錨節(jié)點(diǎn)時(shí)小,且基本保持收斂。圖6比較了有無錨節(jié)點(diǎn)切換情況下集員濾波算法與擴(kuò)展Kalman濾波(Extended Kalman Filter, EKF)的誤差。從圖6可以看出,有錨節(jié)點(diǎn)切換時(shí)估計(jì)誤差比其他兩種情況都小,擴(kuò)展Kalman濾波在噪聲方差精確已知的情況下誤差較小且比較穩(wěn)定;但是當(dāng)噪聲方差不精確時(shí)誤差比其他情況都大,而在實(shí)際中,很難獲得精確的噪聲方差,因此集員濾波算法更有優(yōu)勢(shì)。總體來看,錨節(jié)點(diǎn)切換可以以較小的計(jì)算成本使估計(jì)橢球收斂,且最后估計(jì)誤差小于0.1m,因此選擇有錨節(jié)點(diǎn)切換的情況更好。
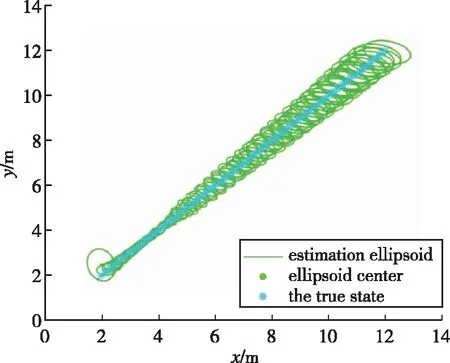
圖4(a) 無錨節(jié)點(diǎn)切換時(shí)估計(jì)結(jié)果(三個(gè)錨節(jié)點(diǎn))Fig.4(a) Estimation without switch of anchor(three anchors)
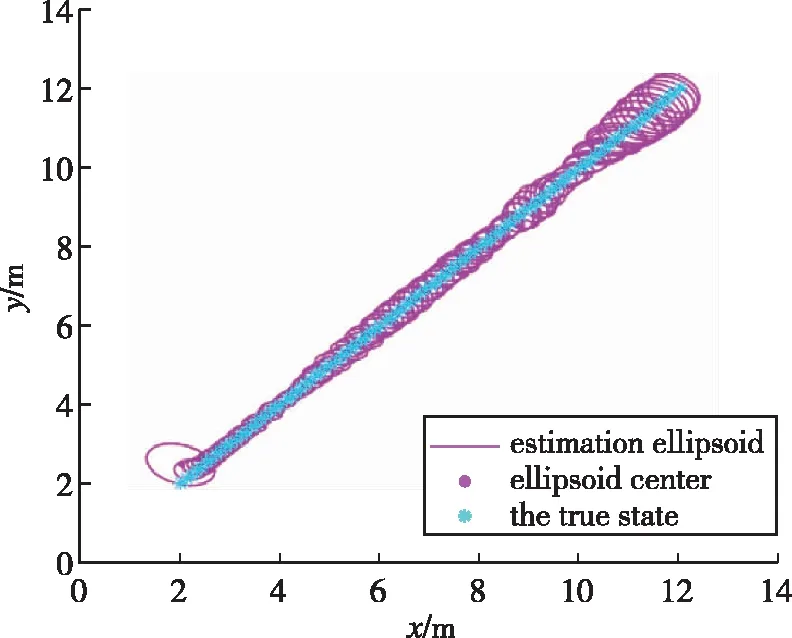
圖4(b) 無錨節(jié)點(diǎn)切換時(shí)估計(jì)結(jié)果(九個(gè)錨節(jié)點(diǎn))Fig.4(b) Estimation without switch of anchor(nine anchors)
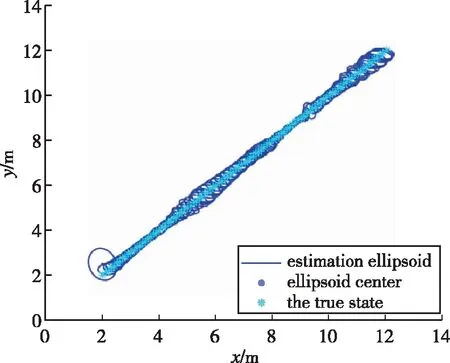
圖4(c) 有錨節(jié)點(diǎn)切換時(shí)估計(jì)結(jié)果Fig.4(c) Estimation with switch of anchor
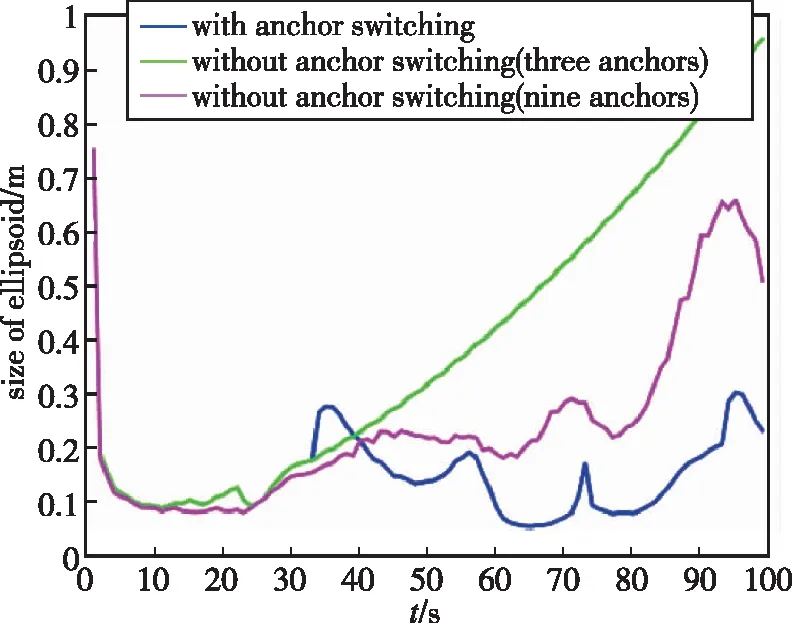
圖5 橢球尺寸Fig.5 Size of ellipsoid
根據(jù)式(40)的觸發(fā)條件可知,當(dāng)目標(biāo)移動(dòng)較慢或靜止不動(dòng)時(shí),兩個(gè)相鄰時(shí)刻的測(cè)量值變化幅度不大,可能達(dá)不到觸發(fā)條件,因此可以降低傳輸頻率。目標(biāo)節(jié)點(diǎn)靜止情況下,從k=1時(shí)刻到k=100事件觸發(fā)的次數(shù)為11,移動(dòng)情況下觸發(fā)次數(shù)為92,由此可以得出,靜止時(shí)觸發(fā)頻率較低,有效降低了傳輸與計(jì)算頻率,節(jié)約了通信與計(jì)算資源。
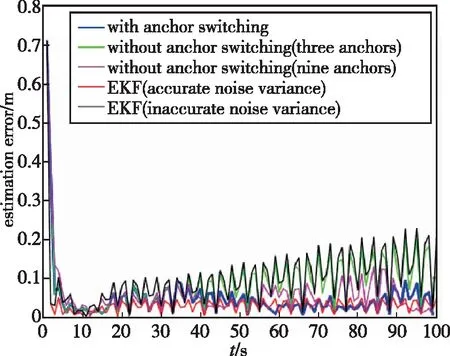
圖6 估計(jì)誤差Fig.6 Error of estimation
6 結(jié)論
隨著信息技術(shù)的發(fā)展,室內(nèi)定位技術(shù)在基于位置服務(wù)相關(guān)的領(lǐng)域都占有舉足輕重的地位,如何以有限的成本提供精確可靠的位置估計(jì)仍然是制約其發(fā)展的難題。為了提供可靠的位置估計(jì),本文首先對(duì)三邊定位算法進(jìn)行了改進(jìn),隨后引入基于事件觸發(fā)的集員濾波估計(jì)移動(dòng)目標(biāo)位置,并針對(duì)實(shí)驗(yàn)過程中遇到的估計(jì)橢球不收斂問題提出了錨節(jié)點(diǎn)自主切換機(jī)制。算法分析與實(shí)驗(yàn)結(jié)果表明:
1)文中引入計(jì)算橢球并集最小外包橢球以及計(jì)算橢球交集最大內(nèi)部橢球的算法改進(jìn)了三邊定位算法,使其在任何情況下都存在可行解。仿真結(jié)果表明,所提的改進(jìn)的三邊定位算法在傳統(tǒng)三邊定位算法無解的情況下仍可獲得較滿意的結(jié)果。
2)本文采用基于事件的集員濾波算法進(jìn)一步降低了噪聲影響,并提出了一種錨節(jié)點(diǎn)選擇機(jī)制以克服估計(jì)橢球不收斂的問題,使用集員濾波可使定位誤差小于0.1m。
3)事件觸發(fā)機(jī)制可根據(jù)目標(biāo)移動(dòng)速度調(diào)節(jié)節(jié)點(diǎn)傳輸與計(jì)算頻率,有效節(jié)約了傳感網(wǎng)絡(luò)的通信與計(jì)算資源。
