三脈沖冷原子陀螺儀中基于內態演化的拉曼光光強補償算法
2021-04-17 01:58:48樂旭廣姚輝彬毛海岑
導航定位與授時 2021年2期
關鍵詞:測量
黃 晨,樂旭廣,程 俊,姚輝彬,毛海岑
(華中光電技術研究所, 武漢光電國家研究中心,武漢 430223)
0 引言
原子陀螺儀[1-3]作為一種基于量子力學的陀螺儀系統,因高精度、低漂移等特性而受到了廣泛關注[4-7],其理論精度相比目前應用的光纖陀螺高出11個量級。并且由于其不存在機械磨損,在長航時測量時不需要定期進行校準[7-10],因此,應用原子陀螺儀構成的慣性測量單元(Inertial Measurement Unit,IMU)十分適用于潛艇等需要長時間慣性導航的裝備。原子陀螺儀主要分為無自旋交換弛豫(Spin-Exchange Relaxation Free,SERF)陀螺儀[11]、核磁共振陀螺儀[12-15],以及冷原子干涉式陀螺儀。目前,我們研制的冷原子陀螺儀是基于對拋型三脈沖Mach-Zenhder干涉儀,使用三束頻率不斷改變的拉曼光與原子相互作用,最終通過測量原子的內態分布,并對兩個原子團干涉所得到的相位進行差分,從而分離出相應的轉動信息及加速度信息。
原子陀螺儀敏感到外界轉動信息的本質在于拉曼光與原子相互作用的頻率失諧量隨著外界載體的角運動及線運動(速度、加速度)的改變而實時改變,通過三束拉曼脈沖(π/2,π,π/2)將該頻率失諧量轉化為干涉儀相位,并且通過相應的解算可以得到外界載體的運動信息。在一個理想的三脈沖系統中,必須保證三束拉曼脈沖為π/2,π,π/2構型,此時才能維持測量值與輸出值穩定的函數關系。在外界復雜環境下,不能保證拉曼光激光器的功率穩定性與實驗室環境下類似。而拉曼光功率的變化直接影響原子與拉曼光的作用效率,即直接改變相互作用拉比頻率。隨著拉比頻率的改變,三束拉曼脈沖不再是理想構型,而會使脈沖寬度發生改變。因此,此時干涉儀的輸出值會隨拉曼光光強的改變而產生相應的變化。若此時不對該結果做出相應的補償,而依舊用原函數關系對陀螺儀輸出值進行解算,就會產生誤差。因此,為了保證在實際應用中陀螺儀的精度,必須建立關于拉曼光光強的補償算法。在陀螺儀中,由于轉動帶來的頻率失諧量的變化與拉比頻率量級類似,并且無法在單拉曼光構型的干涉儀中通過類似重力儀的啁啾補償同時對兩團原子的頻率失諧量進行補償(兩團原子的頻率失諧量大小相等,符號相反),因此只能通過數據后處理而非實時補償的方式對該誤差進行修正。
本文從拉曼光與原子相互作用的內態演化方程出發,對冷原子干涉過程進行建模,根據實際拉曼光強度的變化推導了原子陀螺儀在不同拉曼光強度下的相位輸出值,并根據該關系式提出了一種通過監控拉曼光光強的變化對實際冷原子陀螺儀輸出值進行后處理的補償算法。
1 冷原子陀螺儀拉曼光光強補償算法
基于內態演化矩陣,可以得到在含有拉曼脈沖時原子內態的演化如式(1)所示[10]

(1)
其中
(2)
代入可得
(3)
U(0)+cosΩtV(0)-sinΩtW(0)
cosΩtV(0)-sinΩtW(0)
(4)


U(0)+sinΩtV(0)+cosΩtW(0)
(5)
在自由空間中演化的演化矩陣為
(6)
由于原子初態為
U(0)=V(0)=0,W(0)=1,δ0=0
則通過計算可得
W(3)=K1γ3+K2γ2+K3γ+K4
(7)
其中
K1=A1A2A11cosδbTsinδaT-
A1A5A11sinδbTcosδaT
(8)
K2=(A1A11-A2A3A11+A1A5A12)·
cosδbTcosδaT+(A1A3A12-A2A5A11-
A1A6A11)sinδbTsinδaT+A4A11cosδbT+
A1A8A13cosδaT
(9)
K3=(A2A11+A2A5A12+A1A6A12)cosδbT·
sinδaT+(A1A12-A2A3A12+A2A6A11)·
sinδbTcosδaT+(A7A11+A4A12+A1A9A13+
A2A8A13)sinδbT
(10)
K4=A2A12sinδbTsinδaT-A2A6cosδbTcosδaT-
A7A12cosδbT-A2A9A13cosδaT+A10A13
(11)


A9=sinΩ2τ2
A10=cosΩ2τ2cosΩ1τ1
A12=sinΩ3τ3
A13=cosΩ3τ3
(12)
2 補償方法
通過式(7)~式(12),可以建立對拉曼光光強的補償方法如下:
1)在系統初始化時對拉比頻率進行初始化,通過測量三束拉曼光的持續時間τ1,2,3分別得到三束拉曼光拉比頻率的初始值
(13)
2)通過高速PD監測初始拉曼光強度I0;
3)通過高速PD監測測量過程中拉曼光強度變化的相對值ξ(t)。
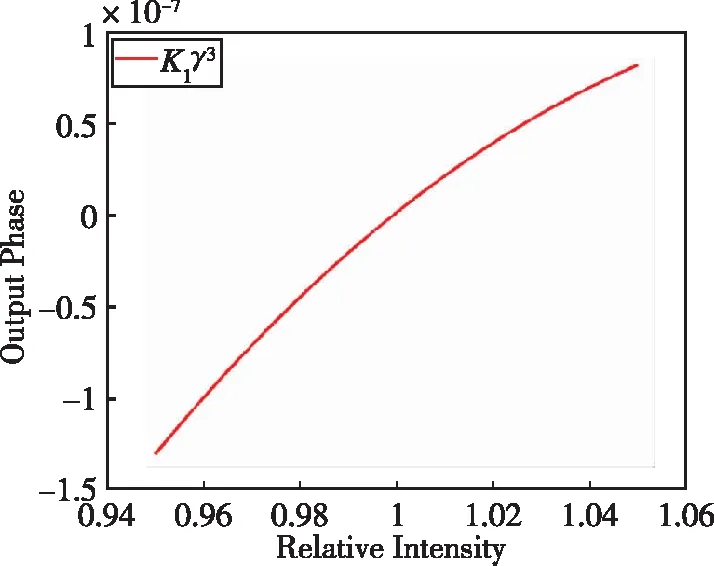
(a)系數k1γ3~1×107
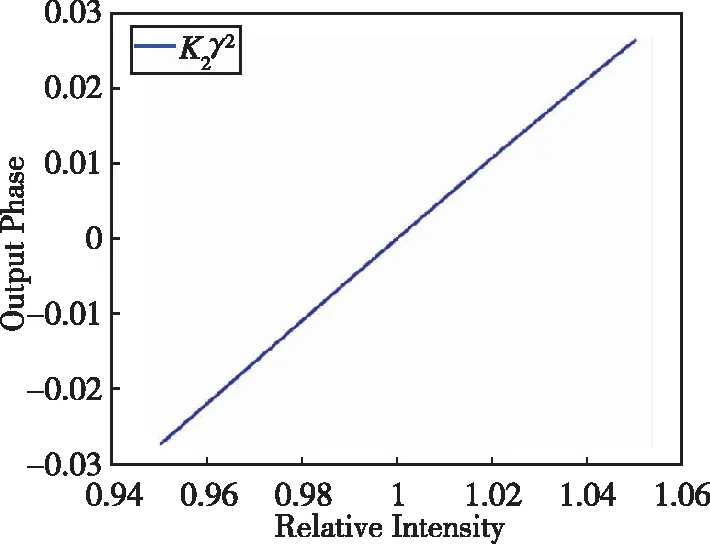
(b) 系數K2γ2~1×10-2
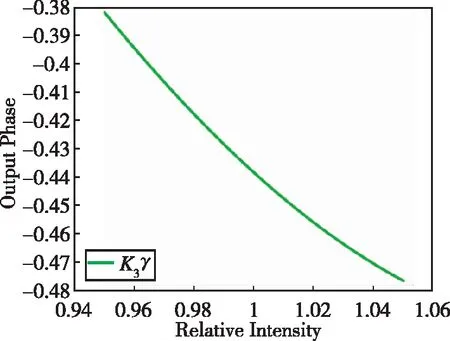
(c)系數K3γ~4×10-1
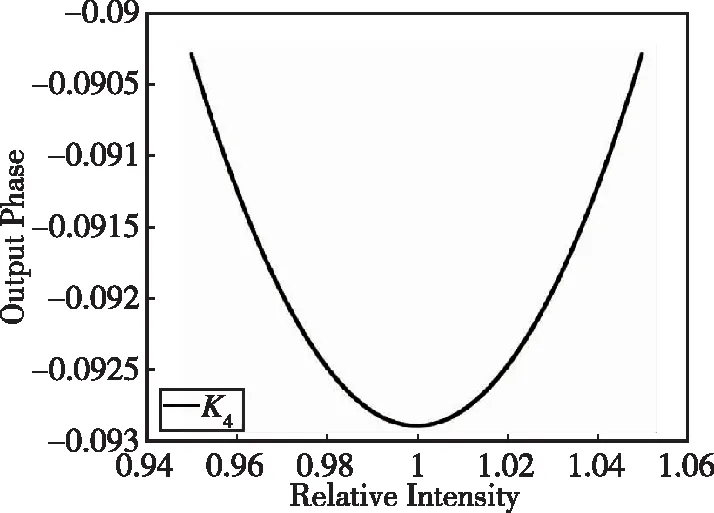
(d) 系數K4~1×10-2圖1 第三束拉曼光后原子布居系數示意圖(這里取轉速Ω=1rad/s,T=3ms,keff=1.6×107)Fig.1 Paramters of the atomic population after the third Raman pulse (for Ω=1rad/s,T=3ms,keff=1.6×107)
則可以得到實際的拉比頻率為Ω1,2,3ξ(t),以及系數A1~13每一項的值。將其代入式(7)~式(11),就可以通過計算機求解γ的值。對于可能存在多個根的情況,可以通過未補償時所求得的轉速進行篩選,篩選出最接近的值即可。則最終補償后的實際轉速為
(14)
若實際情況中,拉曼光光強穩定性較好,而拉曼光持續時間并不穩定(例如存在聲光調制器響應較慢的情況),則可以用如下方法對拉曼光持續時間進行補償:
2)通過高速PD監測初始拉曼光實際持續時間τ1,2,3;
至此,將時序變化等效地轉化為拉曼光強度變化。因此,可以通過相似的方式得到實際轉速值。
3 實驗驗證
為了驗證上述拉曼光光強補償算法的有效性,進行了拉曼光強度調制實驗。在實驗中,通過對聲光調制器的輸出功率進行改變,使拉曼光功率隨時間改變,由于聲光調制器為非線性器件,無法直接記錄其功率因子等價為光強信息,因此在敏感單元內部架設了高速PD對拉曼光強度進行實時測量,如圖2所示。
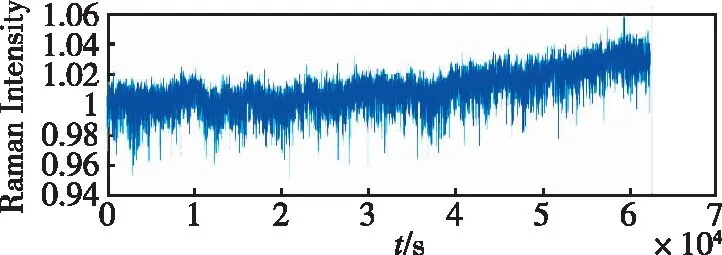
圖2 拉曼光相對強度隨時間變化圖Fig.2 The diagram of relative intensity of Raman pulse over time
相應地,計算此時陀螺輸出值的阿倫方差可以看出,最低點約為6×10-4,并且出現了明顯的上翹現象,如圖3所示。

圖3 拉曼光強度調制實驗補償前陀螺輸出值阿倫方差Fig.3 The Allan deviation of the output of the atomic gyroscope before compensation in Raman intensity modulation experiment
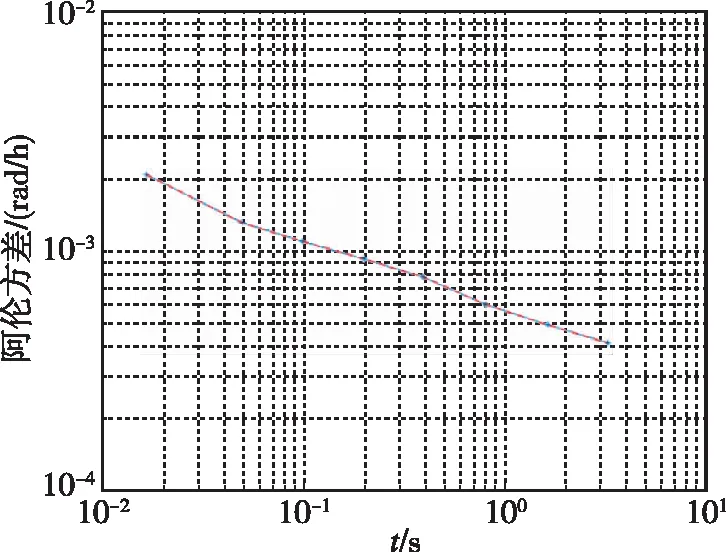
圖4 拉曼光強度調制實驗補償后陀螺輸出值阿倫方差Fig.4 The Allan deviation of the output of the atomic gyroscope after compensation in Raman intensity modulation experiment
隨后,可以看到,在利用測量得到拉曼光相對強度并通過上述補償方法進行補償后,陀螺輸出值得到了顯著改善,如圖4所示。從圖4中可以發現,此時阿倫方差最低點下降至4×10-4,并且還在持續下降中,并沒有出現上翹現象。相比未補償情形,將系統長期穩定性提升了至少33%。這表明該補償算法對拉曼光強度漂移帶來的誤差有很好的抑制作用。
4 結論
本文主要分析和討論了冷原子陀螺儀在拉曼光光強變化條件下的響應,得到如下結論:
1)通過推導得到在光強變化時原子陀螺測量值的理論表達式,并給出了相應的補償算法;
2)提出了通過高速PD對拉曼脈沖的強度以及寬度進行實時監測并記錄數據,根據上述補償算法對實際輸出值進行補償;
3)通過實際調制實驗發現,該補償算法對系統長期穩定性的提升幅度達到33%,并顯著改善了系統誤差的發散現象。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
