基于非導(dǎo)航隨機信號的組合導(dǎo)航技術(shù)研究
2021-04-17 01:59:12王超奇邵會兵黃鵬宇
導(dǎo)航定位與授時 2021年2期
王超奇,邵會兵,張 康,張 超,黃鵬宇
(1.北京控制與電子技術(shù)研究所,北京 100038;2. 清華大學(xué),北京 100084;3.西安電子科技大學(xué),西安 710071)
0 引言
全球?qū)Ш叫l(wèi)星系統(tǒng)(Global Navigation Satellite System,GNSS)目前已經(jīng)廣泛部署并取得了巨大成功,最具代表性的系統(tǒng)包括美國的全球定位系統(tǒng)(Global Positioning System,GPS)、歐洲的伽利略(Galileo)系統(tǒng)、俄羅斯的GLONASS和中國的北斗衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou Navigation Satellite System,BDS)。衛(wèi)星導(dǎo)航定位系統(tǒng)的精度在一般情況下可以滿足不同服務(wù)對象的定位要求。盡管定位技術(shù)已成熟,但衛(wèi)星系統(tǒng)自身的一些特點仍會對定位產(chǎn)生不利影響,例如經(jīng)過遠距離傳輸,接收到的信號較弱,對接收機要求較高;信號在傳輸過程中會受到電離層的干擾,增加了定位的復(fù)雜度;衛(wèi)星高速運動會產(chǎn)生多普勒效應(yīng),且其位置的不固定性也會導(dǎo)致增加和校對對應(yīng)的定位參數(shù),從而增大導(dǎo)航電文和設(shè)備開銷。衛(wèi)星定位最早始于軍用,且常用于在開闊地帶定位,而隨著民用范圍的擴大,在城市和室內(nèi)定位的應(yīng)用逐漸增多,但衛(wèi)星定位服務(wù)并不理想,其在市區(qū)和室內(nèi)等多徑環(huán)境下實現(xiàn)高精度定位難度較大或代價很高[3-4]。
地面數(shù)字電視廣播(Digital Television Terrestrial Multimedia Broadcasting,DTMB)信號則不存在上述這些不利因素,而且DTMB本身就廣泛應(yīng)用于人口聚居地,其信號相對于GNSS信號接收功率較高、頻率較低、頻帶較寬,有些體制還采用正交頻分復(fù)用(Orthogonal Frequency Division Multiplexing,OFDM)技術(shù),使其相對有天然抗多徑的優(yōu)勢。所以利用DTMB信號在上述環(huán)境中進行定位,在技術(shù)層面上具有可能性,從而可以成為衛(wèi)星定位的有力輔助和補充手段。從應(yīng)用層面來說,除完成其基本功能以外,DTMB信號作為一種無線電輻射資源,與其他無線資源如蜂窩網(wǎng)絡(luò)、傳感網(wǎng)絡(luò)一樣,亦可被考慮應(yīng)用于各種軍事和民事領(lǐng)域。目前已經(jīng)有一些針對DTMB定位系統(tǒng)的研究。例如,美國的數(shù)字電視標(biāo)準(zhǔn)(Advanced Television Systems Committee,ATSC)體制中有利用場同步(Field SYNC)定位[3]或者在信號上疊加發(fā)射機標(biāo)識序列TxID來區(qū)分發(fā)射塔進行定位[7]的方法;對于歐洲的數(shù)字視頻廣播(Digital Video Broadcasting,DVB)系列,亦有針對各自特點提出的定位方法[8-9]。而對于國標(biāo)DTMB,則有學(xué)者提出了利用TDS-OFDM的特性,采用時頻結(jié)合的測量偽距的算法[10]。
基于移動通信系統(tǒng)的定位系統(tǒng),在當(dāng)前3G、4G無線通信系統(tǒng)廣泛部署的情況下可以有效地擺脫對全球衛(wèi)星導(dǎo)航信號的依賴,同時通過合理的系統(tǒng)設(shè)計和算法構(gòu)建同樣可以獲得較高的定位精度,以及較低的成本。隨著互聯(lián)網(wǎng)的快速發(fā)展以及智能手機的迅速普及,與手機相關(guān)的技術(shù)和服務(wù)也在不斷的發(fā)展和完善。移動用戶對信息的時效性和位置性的需求越來越強烈,手機定位服務(wù)逐漸成為移動通信領(lǐng)域的熱點,逐漸被人們所關(guān)注。手機定位服務(wù)目前已廣泛應(yīng)用于緊急醫(yī)療、汽車救援、交通管理等領(lǐng)域,以滿足移動執(zhí)法、移動辦公、物流配送、交通管理等業(yè)務(wù)的定位需求。
本文繼承了導(dǎo)航技術(shù)的現(xiàn)有成果,并開展了基于DTMB、接收信號強度指示(Received Signal Strength Indicator,RSSI)移動終端等非導(dǎo)航隨機信號的導(dǎo)航信息提取技術(shù)研究,以及不依賴衛(wèi)星導(dǎo)航的組合導(dǎo)航技術(shù)研究,構(gòu)建以慣導(dǎo)作為參考導(dǎo)航系統(tǒng),并與數(shù)字電視信號、手機發(fā)射塔信號等隨機信號導(dǎo)航裝置構(gòu)成組合導(dǎo)航系統(tǒng),提高系統(tǒng)的抗干擾性能,實現(xiàn)復(fù)雜環(huán)境下的高精度導(dǎo)航定位。
1 組合導(dǎo)航系統(tǒng)基本原理
針對不同非導(dǎo)航隨機信號測量信息的應(yīng)用需求,結(jié)合不同應(yīng)用的動態(tài)條件,設(shè)計了基于隨機信號的組合導(dǎo)航技術(shù),以適應(yīng)位置、速度、距離、距離變化率、角度、時間等任意測量信息的組合。信息融合需對多源信息進行處理,首先要解決的關(guān)鍵問題是建立信息融合的總體框架,架構(gòu)設(shè)計采用開放式結(jié)構(gòu),面向多種信號的共性需求,支持針對不同信號的通用化處理。下面以手機信號和數(shù)字電視信號等非導(dǎo)航信號為例,針對通用組合導(dǎo)航系統(tǒng)架構(gòu)予以介紹,組合導(dǎo)航系統(tǒng)由慣性測量組件、衛(wèi)導(dǎo)接收模件、手機信號模件、數(shù)字電視信號模件和信息處理模件組成。
1)慣性測量組合敏感載體的視速度增量和角度增量,經(jīng)導(dǎo)航解算得到純慣性導(dǎo)航下的載體位置PP和速度VP;

3)數(shù)字電視信號模件和手機信號模件作為衛(wèi)星導(dǎo)航增強系統(tǒng),完成載體和地面發(fā)射塔之間的距離測量。
信息處理模件綜合慣性測量組件、衛(wèi)導(dǎo)接收模件、手機信號模件、數(shù)字電視信號模件的測量信息,構(gòu)造濾波系統(tǒng)的狀態(tài)方程和觀測方程,并進行線性化處理,然后通過Carlson濾波器估計慣性導(dǎo)航的位置誤差ΔPP和速度誤差ΔVP,進而修正慣導(dǎo)的位置和速度。該系統(tǒng)充分發(fā)揮多種導(dǎo)航資源和導(dǎo)航模式的優(yōu)勢,形成優(yōu)勢互補,一旦某種導(dǎo)航模式失效,系統(tǒng)仍能夠提供精確的導(dǎo)航定位信息,并可與慣性導(dǎo)航系統(tǒng)形成組合導(dǎo)航系統(tǒng),大幅提高了組合導(dǎo)航系統(tǒng)對高動態(tài)環(huán)境的適應(yīng)能力,原理框圖如圖1所示。
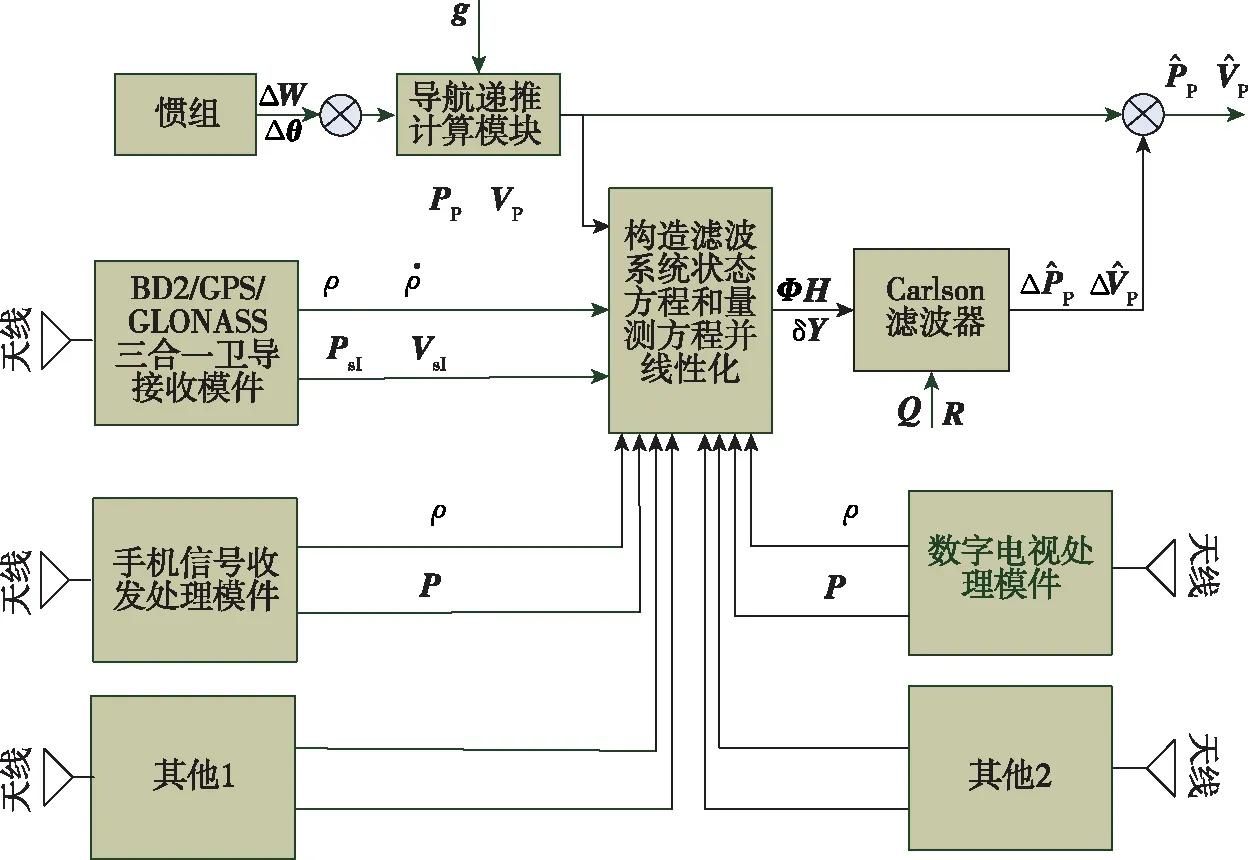
圖1 組合導(dǎo)航系統(tǒng)原理框圖Fig.1 Integrated navigation system block diagram
2 基于DTMB的測距技術(shù)研究
DTMB幀結(jié)構(gòu)的基本單元是信號幀,信號幀由幀頭和幀體兩部分構(gòu)成,基于DTMB的測距過程并不關(guān)心幀體包含的數(shù)據(jù)信息,只需要利用幀頭已知的PN序列進行同步和提取傳輸時延,并利用不同的頻率來區(qū)分發(fā)射塔。
設(shè)經(jīng)過無線信道傳輸接收到的信號r(t)為
r(t)=s(t-τ)*h(t)+w(t)
(1)
式中,s(t)為發(fā)射端時域信號;*表示線性卷積;h(t)為信道沖擊響應(yīng);ω(t)為加性高斯白噪聲(Additive White Gaussian Noise, AWGN);τ為信號傳輸時延。
以采樣周期Ts為單位進行歸一化
(2)
式中,θ為歸一化后的時延;θI為四舍五入后的整數(shù)時延;θF為舍入的分數(shù)時延,θF取值范圍為[-0.5,0.5)。求出歸一化的時延θ后,由于電磁波以光速傳播,所以可以計算出發(fā)射塔與接收機之間的距離D=θTc。
由于PN序列具有良好的自相關(guān)特性,將接收到的信號r(n)和本地PN序列p(n)進行相關(guān)運算后, 找到相關(guān)函數(shù)最大的采樣點即為整數(shù)時延θI[7]
(3)
式中,r*(n)表示接收信號r(n)的共軛轉(zhuǎn)置。
DTMB的基帶符號率為7.56Msps,以4倍過采樣為例,此時采樣率為30.24MHz,忽略分數(shù)時延造成的最大誤差約為5m。因此,在較高的定位精度要求下,分數(shù)時延θF是不可忽略的。
在發(fā)射機和接收機中各有一個平方根升余弦(Square Root Raised Cosine, SRRC)濾波器,發(fā)射信號在經(jīng)過兩個平方根升余弦濾波之后相當(dāng)于過了一個升余弦濾波器。升余弦濾波器的時域沖擊響應(yīng)如下
(4)
式中,T為時域采樣信號的采樣間隔,當(dāng)以N倍采樣率(Ts=T/N)對接收信號進行采樣時,得到的時域信號為hd(n)=hc(nTs),已知的整數(shù)倍時延的影響可以被補償?shù)簦虼酥豢紤]分數(shù)倍時延帶來的采樣點偏移,最終采樣后的時域沖擊響應(yīng)為
hd(n)=hc[(n-θF)Ts]
(5)
因此,在有明顯的主徑的信道下,高斯白噪聲在相關(guān)運算中會相互抵消,所以最終接收信號中包含PN序列的部分與本地PN序列的相關(guān)函數(shù)R(k)如下
=p*(-k)*(p(k)*hd(k)+w(k))
(6)
式中,Rxx(k)是PN序列的自相關(guān)函數(shù)。PN序列具有良好的自相關(guān)特性,其自相關(guān)函數(shù)如下
(7)
式中,P是采樣后PN序列的點數(shù),以PN420及4倍過采樣為例,P的取值為1680,因為P的值遠遠大于1,所以只需要考慮Rxx(k)峰值Rxx(0)的影響即可。所以最后相關(guān)函數(shù)R(k)可以表示為
R(k)=Rxx(0)hd(k)=Rxx(0)hc((k-θF)Ts)
(8)
假設(shè)第k個采樣點的值為y(k),y(k)在k=kmax處取得最大值,在采樣點峰值左右兩邊再各取N個點(一共2N+1個點),并利用最小二乘法計算分數(shù)倍時延θF。具體計算方法如下
(9)
設(shè)置好初始值M0和d0,通過迭代求解最優(yōu)的M和d使得式(9)最小,此時d的取值即為分數(shù)倍時延θF。
3 基于RSSI移動終端的測距技術(shù)研究
RSSI移動終端根據(jù)測量得到的基站信號接收強度,通過無線信號傳播模型對基站與被測終端之間的距離進行計算。基站發(fā)射的信號在經(jīng)過一段距離的傳播之后,根據(jù)自由空間傳播模型,信號的強度將會逐漸衰減,即可利用強度衰減與距離之間的關(guān)系,根據(jù)初始強度及被測強度對距離進行估算,例如可以使用對數(shù)距離衰減模型,即
(10)
式中,p為當(dāng)終端與基站之間的距離為d時信號的路徑損耗;p0為距離為d0時的參考路徑損耗,需要通過實際測量得出;n為路徑損耗指數(shù),表明路徑損耗隨距離增長的關(guān)系,其具體取值與環(huán)境有密切關(guān)系;ξ為正態(tài)隨機變量,根據(jù)環(huán)境條件進行相應(yīng)取值。
電波傳播特性的研究是移動通信系統(tǒng)的關(guān)鍵技術(shù)之一,無線信道的傳播特性與通信環(huán)境密切相關(guān),具有很大的隨機性。多年來,許多專家和學(xué)者對信道的傳播特性進行了大量的分析研究,Okumura模型在全球移動通信(Global System for Mobile Communication, GSM)系統(tǒng)的路徑損耗預(yù)測方面具有較高的精確度。
在Okumura公式中,經(jīng)擬合獲得的市區(qū)傳播損耗基本公式為
L50(市區(qū))=69.55+26.16lgf-13.82lghte-
α(hre)+(44.9-6.55lghte)lgd
(11)
式中,α(hre)為有效的移動天線高度增益校正因子,是覆蓋區(qū)范圍的函數(shù)。
由于Okumura模型是基于大量實驗數(shù)據(jù)擬合得出的經(jīng)驗?zāi)P停瑸檫M一步提升精確度,可以將某地區(qū)具有代表性的充足實測數(shù)據(jù)代入公式后,通過線性回歸等數(shù)學(xué)手段實現(xiàn)對模型的校正。對式(11)變化后用以下通用形式表示
L=k1+k2lgf+k3lghte+(k4-k5lghte)lgd
(12)
因此只需要確定k1、k3、k4、k5即可獲得對傳播模型的修正。此處可以在實際測試場景中選取若干測試點進行位置-場強測試,當(dāng)測試數(shù)據(jù)的數(shù)量和代表性都足夠時,采用最小二乘或線性回歸等方法對測試數(shù)據(jù)進行擬合,就可獲得式(12)中對應(yīng)的系數(shù),從而可精確計算出相對基站的距離。
4 組合導(dǎo)航系統(tǒng)算法研究
4.1 觀測變量、狀態(tài)變量的選取
觀測變量主要包括衛(wèi)導(dǎo)模件測量的偽距、偽距變化率以及手機信號模件/數(shù)字電視信號模件輸出的距離信息等非衛(wèi)星導(dǎo)航隨機信號的測量信息。
狀態(tài)變量的選取是濾波器設(shè)計的關(guān)鍵之一。本文涉及的狀態(tài)變量可分兩類,一類與慣性導(dǎo)航系統(tǒng)有關(guān),狀態(tài)變量選取慣導(dǎo)位置誤差、速度誤差、加表各項誤差、陀螺漂移、初始對準(zhǔn)誤差等;另一類則與接收機有關(guān),主要考慮接收機時鐘的影響,如接收機鐘差等。
4.2 構(gòu)造狀態(tài)方程
由于導(dǎo)航系統(tǒng)是連續(xù)的非線性系統(tǒng),首先需要對其線性化。為了盡可能地減小由于線性化帶來的誤差,采用根據(jù)估計值計算的名義值附近展開進行線性化的方法,那么濾波時的狀態(tài)量實際為估計值的殘差δXr,在名義值附近展開,線性化后得到再入段組合導(dǎo)航濾波器的狀態(tài)方程為
其中,Ar為狀態(tài)轉(zhuǎn)移矩陣。
4.3 構(gòu)造量測方程
本文中,濾波系統(tǒng)直接采用各模件測量的距離和距離變化率等非導(dǎo)航隨機信號的測量信息作為測量變量,以消除測量數(shù)據(jù)相關(guān)引起的組合導(dǎo)航精度下降問題。下面以衛(wèi)導(dǎo)、數(shù)字電視和手機信號為例給出距離和距離變化率測量信息。
距離量測方程為

距離變化率量測方程為

那么,可以得到線性化后的量測方程為
其中,δYr,j,i為距離、距離變化率測量量與名義值之差;Hr,j為量測矩陣。
5 仿真結(jié)果
基于非導(dǎo)航隨機信號的組合導(dǎo)航技術(shù)研究成果,以低精度慣性導(dǎo)航為參考導(dǎo)航系統(tǒng),融合數(shù)字電視信號、手機信號等非導(dǎo)航隨機信號,開展了數(shù)學(xué)仿真、半實物仿真和跑車試驗驗證。數(shù)字電視信號測距精度如圖2所示,手機信號測距精度如圖3所示;數(shù)字電視信號發(fā)射塔和手機信號發(fā)射塔相對載體軌跡的分布如圖4和圖5所示;組合導(dǎo)航仿真結(jié)果如圖6和圖7所示。基于非導(dǎo)航隨機信號的組合導(dǎo)航定位和測速精度分別在±10m、±0.1m/s以內(nèi)。
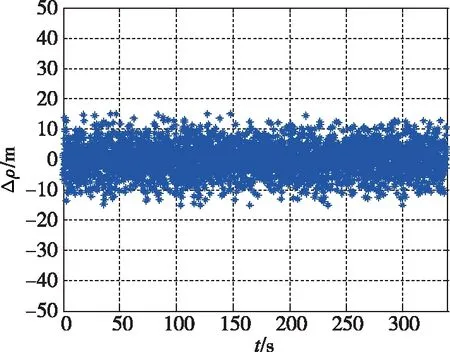
圖2 數(shù)字電視信號測距精度Fig.2 Digital television signal ranging accuracy
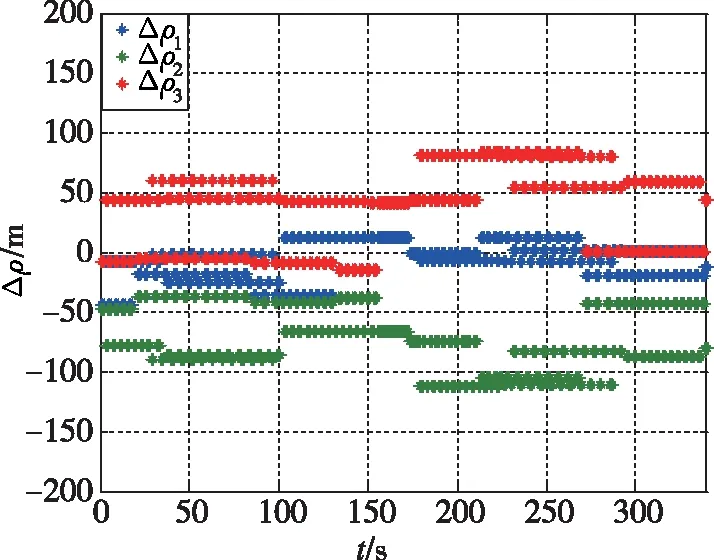
圖3 手機信號測距精度Fig.3 Cell phone signal ranging accuracy
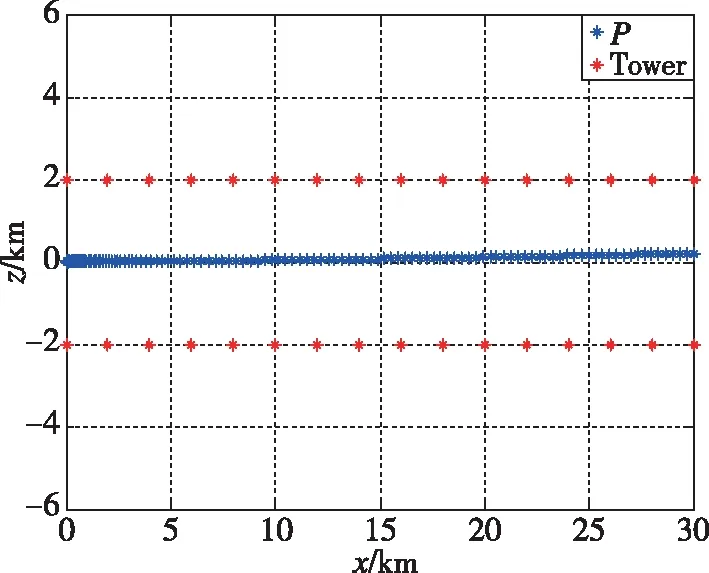
圖5 手機信號發(fā)射塔相對載體軌跡的分布Fig.5 Distribution of mobile phone signal transmission tower relative to carrier trajectory
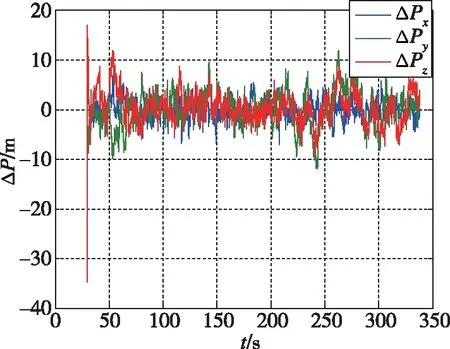
圖6 定位精度Fig.6 Positioning accuracy
6 結(jié)論
通過理論研究和試驗驗證,可以得到以下結(jié)論:
1) 通過DTMB和RSSI移動終端等非導(dǎo)航隨機信號可以提取高精度導(dǎo)航信息;
2)基于非導(dǎo)航隨機信號的組合導(dǎo)航算法可以在較短時間內(nèi)收斂,且精度可達到預(yù)期值,定位和測速精度分別優(yōu)于±10m、±0.1m/s;
3)本文研究的基于非導(dǎo)航隨機信號的導(dǎo)航信息提取技術(shù)和組合導(dǎo)航技術(shù)可以彌補衛(wèi)星導(dǎo)航系統(tǒng)的不足,作為衛(wèi)星導(dǎo)航的有效補充手段,能夠提升復(fù)雜環(huán)境下的高精度導(dǎo)航能力,具有較強的實用價值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
