基于模糊和預補償的多電機控制系統的研究
2021-04-13 03:23:50任志玲劉子洋
電源學報 2021年2期
任志玲,劉子洋
(遼寧工程技術大學電氣與控制工程學院,葫蘆島125105)
隨著工業制造技術的不斷發展,在軋鋼、印刷和紡織等行業,多電機控制系統得到越來越廣泛的應用。多電機協同控制系統性能的好壞直接影響運行的可靠性和產品的質量[1,2]。 目前,由多臺電機構成的傳動系統已經發展出多種不同形式的結構,根據電機間是否存在耦合關系,將其劃分為非耦合控制和耦合控制兩大類。其中非耦合控制包括主令控制和主從控制等; 耦合控制包括并聯交叉耦合控制、相鄰交叉耦合控制以及偏差耦合控制等[3]。采用非耦合控制方式的優點是結構簡單易實現,但缺點是電機間沒有耦合規律進行補償, 導致同步性能差,抗擾性能不夠理想[4];為了形成速度控制閉環以提高同步控制精度,Korean[5]提出并聯交叉耦合結構,其主要特點是將2 臺電機的轉速作差,將得到的偏差作為附加的反饋信號, 對轉速差進行補償,從而獲得良好的同步控制精度,這種控制策略比較適用于2 臺電機的控制, 隨著電機數量的增多,其控制算法的復雜程度將大大增加;Perez-Pinal 等[6]提出適用于多電機的偏差耦合結構,其控制性能有了很大改善;文獻[7]將偏差耦合結構進行簡化,運用相鄰交叉耦合控制,降低了系統的復雜程度[8],但當某臺電機遇到負載波動時,補償量只能沿著相鄰電機逐步傳導, 導致補償對系統有一定的延遲;文獻[9-10]采用固定增益速度補償器實現偏差耦合控制,該算法雖然簡單,但因其補償器只考慮了轉動慣量對同步性能的影響, 而沒有考慮如摩擦因數、磁鏈等其它本體參數導致速度不同步的因素,所以同步精度有待進一步提高。在綜合考慮簡化計算和同步精度的基礎上,提出基于模糊補償和預補償的偏差耦合控制結構,為了進一步提高補償機構對偏差進行補償的速度,提出了一種速度預補償函數。
盡管模糊補償器可以削弱擾動造成的不利影響,但同時也會使未受擾動影響的電機轉速產生波動,導致對指令信號的跟蹤性能變差。 以往研究只針對同步補償規律進行改進,而沒有考慮電機跟蹤性能的提高。 仿真實驗表明,提高跟蹤控制器的性能對多電機同步的抗擾性和同步精度有很大提高,為此,設計了一款帶有負載前饋功能的滑模控制器SMC(sliding mode controller)。
1 偏差耦合固定增益補償結構
1.1 同步誤差及跟蹤誤差的定義
永磁同步電機PMSM(permanent magnet synchronous motor)具有體積小、重量輕、結構簡單、效率高和損耗小等優點,非常適合應用于數量較多的電機系統。本文以一個包含n 臺PMSM 的系統為對象展開研究。 各臺電機的運行速度關系為ω1∶ω2∶…∶ωn=λ1∶λ2∶…∶λn,其中λi為電機間速度比值。 定義第i 臺電機的跟蹤誤差為

式中:ω*i(t)為第i 臺電機的指令速度;ωi(t)為第i臺電機的實際響應速度。 定義第i 軸與第j 軸的同步誤差為

式中,ωi和ωj分別為第i 和j 軸的實際響應速度。
當λ1、λ2、…、λn至少有一個不為1 時,稱這種運行方式為比例同步方式;當λ1、λ2、…、λn都為1時,稱這種運行方式為完全同步運行方式。 本文是基于各軸的角速度比例系數λi=1(i=1,2,…,n),也就是完全同步的基礎上展開研究的,那么各軸的指令速度ω*1(t)=ω*2(t)=…=ω*n(t)=ω*(t)。為了保證多電機系統的實際應用價值,要求各臺電機的跟蹤誤差在盡可能短的時間內穩定收斂,即

同時要求電機各軸同步誤差也能夠在盡可能短的時間內達到穩定并收斂,即

基于上述對跟蹤誤差和同步誤差的定義,n 臺電機的控制問題可以描述為:設計同步補償器以及跟蹤控制器,使同步誤差和跟蹤誤差在盡可能短的時間內穩定且收斂于0。
1.2 多電機系統同步補償結構
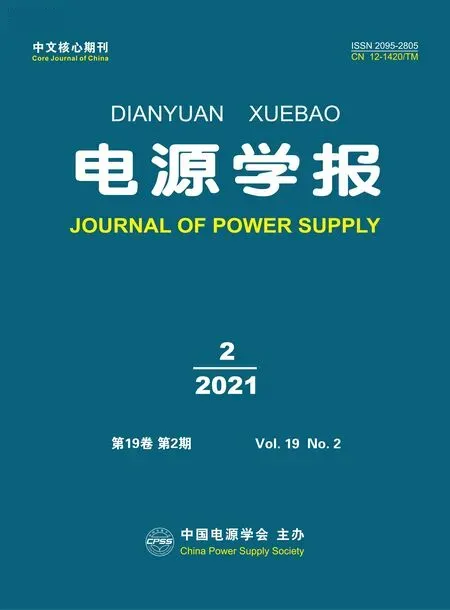
以3 臺電機為例,偏差耦合固定增益補償系統中的同步速度補償模塊1 如圖1 所示。
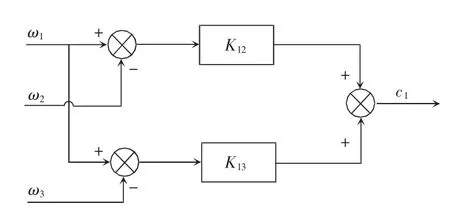
圖1 偏差耦合固定增益補償模塊1Fig. 1 Deviation coupling fixed-gain compensation module 1
偏差耦合控制的速度補償信號是由一臺電機與其他電機速度反饋的差值乘以相應的耦合增益后再相加得到的。各個速度補償器的耦合增益通過相應電機之間的轉動慣量求得。圖1 中的K12和K13為速度反饋耦合增益。 第i 補償模塊的增益[11]Kij為

式中:Ji為第i 臺電機的轉動慣量;Jj(j=1,2,…,n,且j≠i)為其余電機的轉動慣量。
由圖1 可得同步補償模塊1 的速度補償值為

然后將補償量c1補償到電流環。
固定增益補償器的耦合規律只考慮了電機轉動慣量的差異,考量因素較少,因此設計比較粗糙且補償效果不理想。 為此,本文將固定補償增益Kij替換為綜合考慮各種電機參數差異和負載擾動的模糊補償器。
2 模糊補償和預補償
2.1 模糊補償器的設計
設e 和ec 分別表示語言變量 “同步誤差”和“同步誤差變化率”。 仿真過程中,將電機指令速度設置為額定轉速1 500 r/min, 在0.3 s 時突加19.1 N·m 的額定轉矩。模糊邏輯是用語言變量來表示不確定概念[12]。 在整定模糊同步補償器參數的過程中,用示波器測量εij、及補償量u,當補償效果達到最優時,選取多次測量結果的最大值即可確定同步誤差及補償量的基本論域,保證此時的模糊同步補償器能夠對加額定負載且具有參數差異的3 臺電機有較好的綜合補償效果。由于誤差變化率是由同步誤差經過求導得到的, 必須經過Saturation 飽和函數適當限幅后提高模糊函數對基本論域的利用率,確定其基本論域為[-2 500,+2 500]。 同步誤差的基本論域為[-2.7,+2.7],輸出補償的基本論域為[-40,+40]。 選取電機i 與電機j 的速度偏差E 及其變化率EC 作為模糊控制器的輸入語言變量模糊集合,補償量U 為其輸出語言變量模糊集合。
E、EC 和U 的離散化論域分別為
E={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
EC={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
U={-3,-2,-1,0,1,2,3}
誤差及誤差變化率的量化因子分別為

補償量的比例因子為

E、EC 和U 的語言值集合分別為
E={PB,PM,PS,PO,NO,NS,NM,NB}
EC={PB,PM,PS,PO,NO,NS,NM,NB}
U={PB,PM,PS,PO,NO,NS,NM,NB}
根據操作經驗來確定隸屬度函數和控制規則。綜合考慮計算量和準確性, 選用如圖2~圖4 所示的三角形隸屬度函數。

圖2 E 的隸屬度函數Fig. 2 Membership function of E

圖3 EC 的隸屬度函數Fig. 3 Membership function of EC
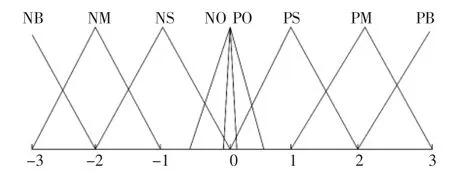
圖4 U 的隸屬度函數Fig. 4 Membership function of U
模糊控制規則是模糊控制的核心,而控制規則設計的質量直接影響補償器的性能。通過總結操作經驗,如:由“若電機i 與j 的同步誤差大,且有快速增大的趨勢,那么通過輸出很大的補償量,來減小電機間同步誤差”來寫出“If E is PB and EC is PB,then U is NB.”等一系列模糊語句。具體模糊控制規則見表1。
2.2 預補償函數
為了提高電機間的同步響應速度,引入一個速度預補償函數

表1 模糊控制規則Tab. 1 Fuzzy control rules
預補償函數與系統中每臺電機的速度相關,速度補償器首先計算出系統的平均速度,如果電機2突遇較大負載,使得ω2<ω1且ω2<ω3,那么,ω3>,得,Δ2>0,Δ3<0。 將補償量Δi加到各自的同步補償器中,便可加快削弱電機間的同步速度誤差,使各臺電機同步響應快于單一模糊同步補償的速度。 以此類推,在各臺電機速度相差較大時, 能夠給速度慢于平均速度的電機正補償量,使其加快速度; 給速度快于平均速度的電機負補償量,使其降低速度。當3 臺電機轉速相同時,預補償函數便不再起作用。基于模糊和預補償函數的整體同步補償模式結構1 如圖5 所示。

圖5 模糊和預補償模塊1Fig. 5 Fuzzy and pre-compensation module 1
由圖5 可知,模糊和預補償模塊的綜合補償值為

式中,fuzzy(ωi-ωj)為變量ωi-ωj的模糊補償函數。此時的偏差耦合將各臺電機之間的同步誤差通過模糊、預補償函數將得到的補償量補償到采用軟連接方式的各臺電機。 當各臺電機出現不同步時,補償量會加入到直軸電流id=0 的矢量控制電流環,通過調節電流環iq的大小來使電機加速或減速;而當各臺電機保持同步時,同步補償模塊輸出為0,即不再進行補償。
3 跟蹤誤差及同步誤差精度的提高
3.1 跟蹤誤差控制器
由于同步能力與跟蹤能力存在一定的正比關系,故改變以往多電機研究只在同步補償規律方面提升性能的局限,并采用提高跟蹤控制性能來改善同步性能的思想,設計1 款帶有負載前饋的滑模跟蹤誤差控制器以增強系統魯棒性。多電機控制系統整體結構如圖6 所示。

圖6 改進型偏差耦合多電機控制系統結構Fig. 6 Structure of improved deviation coupling multi-motor control system
本文是基于表貼式PMSM 的多電機系統,因而有Ldi=Lqi, 其中,Ldi和Lqi分別為第i 臺電機定子繞組的d 軸和q 軸分量, 所以電磁轉矩可簡化為

式中:Tei為第i 臺電機的電磁轉矩;npi為第i 臺電機的極對數;ψfi為第i 臺電機一相定子繞組中永磁磁鏈的幅值;iqi為第i 臺電機q 軸繞組的電流。 為了更加接近真實工況,在考慮PMSM 的摩擦系數υ的情況下,運動方程為

式中:Ji為第i 臺電機的機械負載系統折算到電動機軸端的轉動慣量;ωi為第i 臺電機的機械角速度;Tli為折算到第i 臺電動機軸端的負載轉矩。對n臺電機控制系統,設PMSM 的狀態變量為
式中,ω*為第i 臺電機的指令速度。
滑模變結構具有動態響應快和魯棒性強等特點,故采用滑模變結構來構成跟蹤控制器的主體[13]。取一階滑模面

仿真實驗中取常數c=20。 為削弱抖振的影響,并縮減到達穩定點的時間,采用的變指數趨近律為

式中:ε|x|a為系統的運動點趨近切換面的速率;-k|x|bs 為變指數趨近項。
利用Lyapunov 第二方法對系統穩定性進行證明。 構造一個正定標量函數為

對V 求導得

利用式(18)新型趨近律來設計跟蹤控制器,取a=2,b=2;為了簡化計算,選用x=x1,那么新型趨近律為

得系統控制律為

3.2 觀測器的設計
為了提高系統的抗擾性能,設計負載觀測器并前饋至跟蹤控制器中, 將負載轉矩作為未知變量反饋到跟蹤控制器中。 當負載出現波動時,跟蹤控制器能及時響應負載變化。由于控制器采樣周期非常短, 因而在每個周期內將負載轉矩視為基本不變,即dTli/dt=0。 以電機轉速和負載轉矩作為觀測對象,建立狀態方程,即

上述狀態方程中,令U=[C CA]T,有rank(U)=2,U 的秩與狀態變量個數相等,因而滿足完全能觀測條件,即在任意初始時刻系統都能夠被觀測。 建立狀態觀測方程為

式中:上標“^”表示估計值;H 為反饋增益矩陣,H=[h1h2]T。 設為觀測誤差,則

其特征方程為


由式(25)解得反饋增益矩陣系數為

經過反復調試,取h1=6 000,h2=-7 200,然后將觀測到的負載轉矩前饋至跟蹤控制器。
4 仿真實驗與結果分析
為驗證本文所提基于同步補償和跟蹤控制聯合作用的多電機控制策略,選用3 臺永磁同步電機作為仿真模型。 為了使仿真更接近真實,同時也為了檢驗多電機控制策略的同步與跟蹤控制性能,3臺電機參數在合理范圍內有所不同,主要參數設置如表2 所示。
按照圖6 控制結構搭建仿真模型。為了與所提控制策略進行對比,首先搭建固定增益同步補償模塊和PID 跟蹤控制器的多電機系統,然后進行仿真參數設置。 設置仿真步長為固定步長0.000 01 s,仿真時間為0.5 s,并在0.3 s 時為電機2 突加19.1 N·m 額定負載, 模擬系統在實際突加額定負載狀況時的速度同步和對指令信號的跟蹤能力。 仿真結果見圖7。
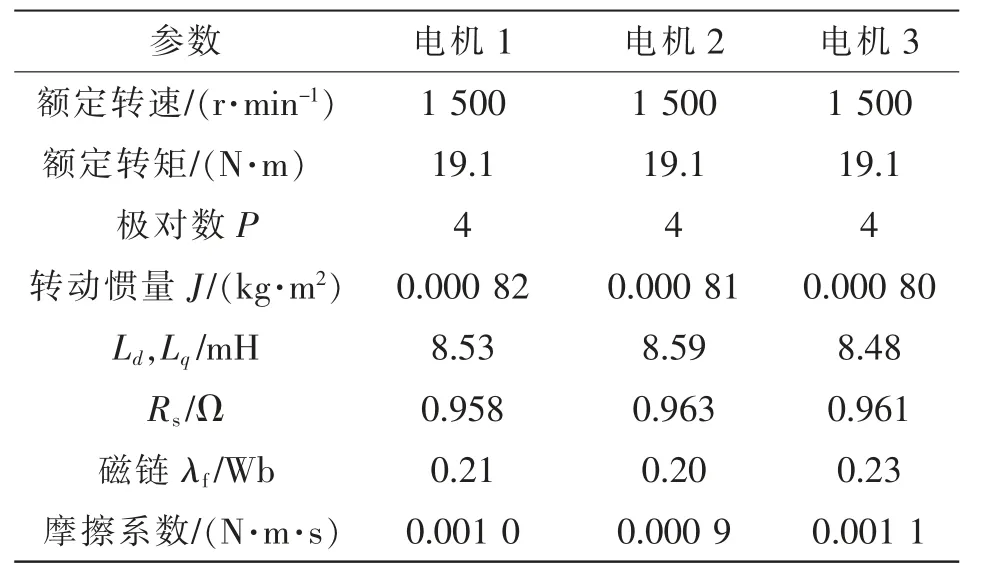
表2 各臺電機參數Tab. 2 Parameters of each motor

圖7 固定增益補償器和PID 跟蹤控制器仿真結果Fig. 7 Simulation results with fixed-gain compensator and PID tracking controller
由圖7 可知,當電機2 突加負載時,電機間由于設置有固定補償增益,會減小電機2 的速度下降值。 但電機1、3 與電機2 的同步效果并不好,經過比較長時間各臺電機的速度才能基本同步和達到額定轉速。
為驗證模糊補償器的補償效果并為檢驗預補償函數做準備,搭建模糊補償結構和PID 跟蹤控制器,仿真參數設置同上,仿真結果見圖8。

圖8 模糊同步補償器和PID 跟蹤控制器仿真結果Fig. 8 Simulation results with fuzzy synchronous compensator and PID tracking controller
與圖7 相比可以看出,圖8 中,電機突加負載,各臺電機基本保持同步,并且在0.35 s 時基本恢復額定轉速,模糊補償器起到了比較好的效果。
搭建模糊和預補償同步誤差補償器及PID 跟蹤誤差控制器,仿真參數同上,仿真結果見圖9。
對比圖9 與圖8 可以看出,沒有預補償函數的電機在0.35 s 基本恢復額定轉速;而帶有預補償函數的補償結構使系統在0.34 s 就恢復額定轉速,并且轉速曲線更加圓滑。
為驗證提高跟蹤誤差控制器的性能可增強系統魯棒性, 搭建固定增益補償結構和負載前饋型SMC 系統,仿真參數設置同上。 由圖10 可以看出,電機2 在0.3 s 時加上額定負載轉矩, 其轉速下降了50 r/min,相對于圖7 的PID 控制器轉速下降的175 r/min 有明顯改善,而且各臺電機經過很短時間就恢復到指令速度。電機系統的魯棒性得到了明顯增強,但由于同步補償結構的原因,同步效果并不理想。
最后,以模糊、預補償和負載前饋型SMC 為模型進行仿真,驗證了所提同步補償和跟蹤控制聯合作用思想的正確性。如圖11 所示,當電機2 在0.3 s受到額定負載的擾動時, 相對于前面幾種情況,電機間的同步性能以及最大下降速度都得到了改善。

圖9 模糊補償和預補償結構及PID 同步補償器仿真結果Fig. 9 Simulation results with fuzzy compensation and pre-compensation structure and PID synchronous compensator
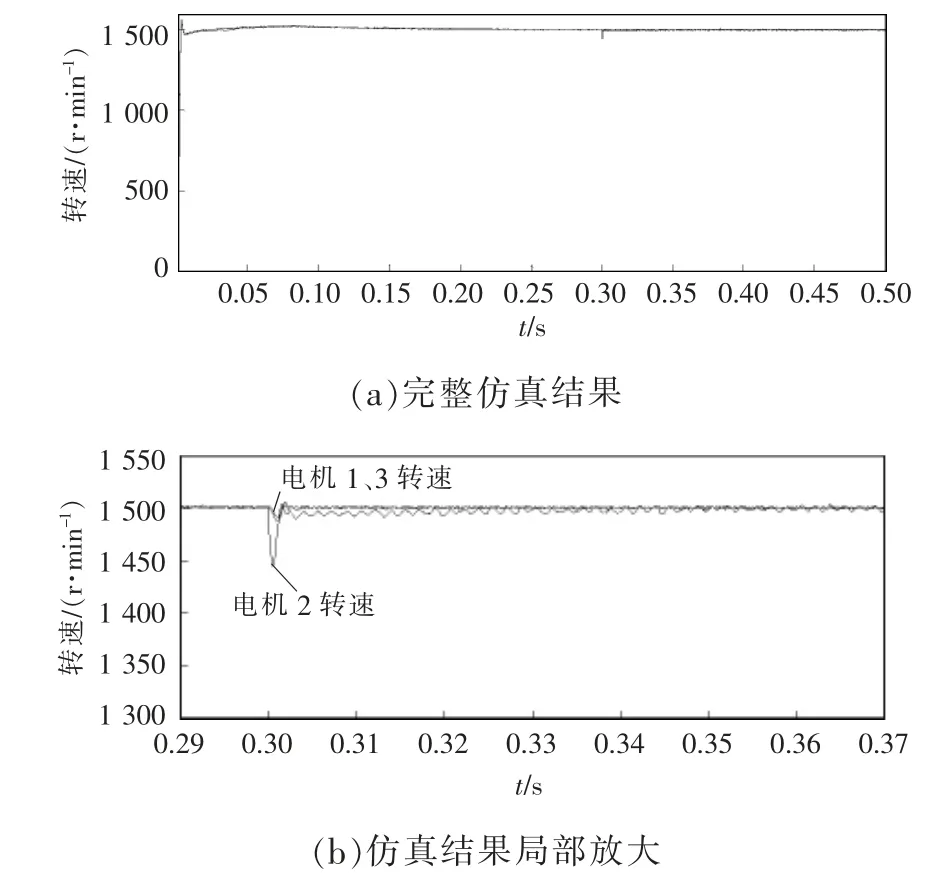
圖10 固定增益補償和負載前饋SMC 跟蹤控制仿真結果Fig. 10 Simulation results with fixed-gain compensation and load feedforward SMC tracking control
為進一步檢驗算法的穩定性,模擬實際傳送一個物體過程中加負載和減負載的復雜工況,搭建固定補償增益和PID 跟蹤控制器。 電機1 在0.2 s 時加19.1 N·m 的額定負載,經過0.1 s 物體到達電機2, 再過0.1 s 3 臺電機同時承受19.1 N·m 額定負載,至0.4 s 時,電機1、2 和3 依次卸負載,模擬物體被傳送至別處。 仿真曲線如圖12 所示。

圖11 模糊、預補償和負載前饋型SMC 控制器仿真結果Fig. 11 Simulation results with fuzzy, pre-compensation and load feedforward SMC controllers

圖12 固定補償增益和PID 控制器模擬傳送物體仿真曲線Fig. 12 Simulation curves with fixed compensation gain and PID controller to simulate the transfer of objects
將上述補償結構和跟蹤控制結構改為模糊、預補償結構和負載前饋型SMC, 模擬工況與圖12 相同,仿真結果如圖13 所示。可以看出改進型系統模擬復雜工況的最大速降、魯棒性和同步效果等都要優于固定增益偏差耦合和PID 跟蹤控制器,驗證了本算法的正確性。
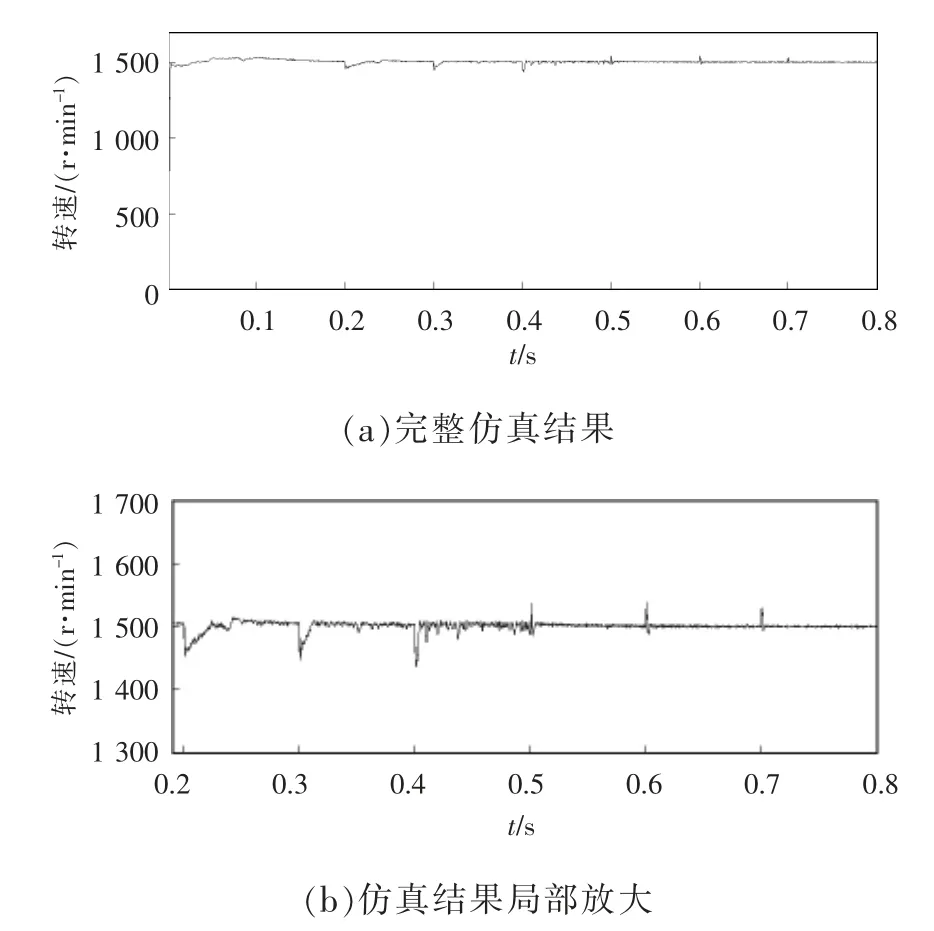
圖13 改進補償結構和改進跟蹤控制器模擬傳帶仿真結果Fig. 13 Simulation results with improved compensation structure and improved tracking controller to simulate conveyors
5 結語
本文針對多電機耦合規律補償效果不理想及沒有考慮提高跟蹤性能等缺點,提出了基于同步補償和跟蹤控制聯合作用的控制策略。突破了以往研究只在速度同步補償方面創新的局限性,驗證了提高跟蹤誤差控制器性能對增強系統魯棒性和同步性能都有很大改善的正確性。 同時,提出模糊同步誤差補償器, 改善了以往補償效果不理想的問題;為了提高補償速度,提出一種預補償函數,在仿真實驗中,可以看出其對減少到達同步的時間及指令跟蹤的時間有明顯作用。