魚加工生產線頭尾定向調理上料系統設計與試驗*
2021-04-09 01:45:48單慧勇張程皓李晨陽趙輝田云臣
中國農機化學報 2021年3期
關鍵詞:檢測
單慧勇,張程皓,李晨陽,趙輝,田云臣
(1.天津農學院工程技術學院,天津市,300384;2.天津農學院計算機與信息工程學院,天津市,300384)
0 引言
魚類前加工處理主要包括去頭、去尾、去鱗、剖切去臟及切片等環節。其中,魚類定向處理是極重要的一環,能否準確可靠的進行魚體定向上料,直接關系到魚體的后續加工處理的效率和可靠性。
在魚體定向方面,陳福禮等[1]研制了鮮魚加工裝置。在其整理部分,輸送帶傾斜布置,在其輸送帶上方設有規律排列的插針。當魚體經過傳送帶時,插針會插入魚鱗或者魚鰓中,帶動魚體向上運動,魚體在重力作用下,實現頭前尾后向前輸送。該裝置主要靠插針插入魚體鰓部或魚鱗處帶動魚體運動,容易造成魚體損傷。高星星等[2]利用魚體體型差異及摩擦特性,將魚體放置在傾斜的振動臺面上,可以實現魚體頭尾定向。但是其試驗樣機結構較小,不能同時處理大批量的魚,難以推廣至生產線使用。此外振動臺僅依靠四根螺桿懸掛固定,中間再無其他支撐,在工作中,振動臺持續振動,對螺桿及機架損耗較大。向云鵬[3]針對淡水魚振動定向方面進行研究,研制出淡水魚振動定向設備。該設備主要采用往復振動的方法,對魚體實現頭尾定向。但是該設備若達到共振頻率時,振動設備震動情況劇烈,而且只針對單條魚體進行設計研究,難以適用于實際生產中的大批量魚體同時處理。
本文采用測量光幕掃描魚體圖像,通過對魚體圖像進行處理,根據圖像特征識別魚體頭尾方向,同時為方便操作者實時監測魚體狀態,設計了基于Matlab環境的人機交互GUI界面。
1 系統整體設計
魚加工生產線頭尾定向調理上料系統包括檢測裝置和調整裝置。檢測裝置主要由導向裝置和測量光幕組成。控制系統整體結構如圖1所示。魚體在傳送帶上向前輸送,經過導向裝置梳理,魚體豎直通過測量光幕[4],待魚體完全通過測量光幕后,計算機繪制魚體圖像,計算魚體長度,判斷魚體頭尾方向,根據判斷結果向同步帶驅動電機發送相應的指令,完成魚體頭尾定向。
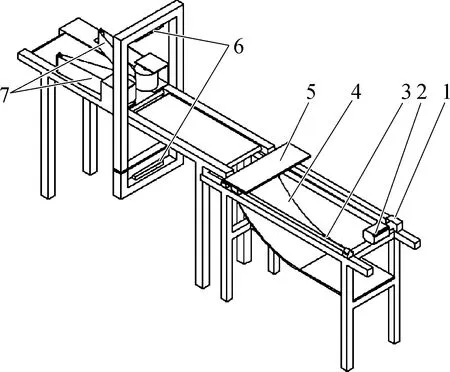
圖1 系統整體結構示意圖
1)檢測裝置。控制系統中測量光幕的型號為STC-D96025測量光幕,包括發光器和受光器[5]。發光器上每隔2.5 mm有一個光束點,與之對應的,受光器每隔2.5 mm有一個接收點,共包括96個光束點,檢測范圍237.5 mm。檢測時,魚體豎直經過測量光幕,魚寬10~15 cm不等,測量光幕檢測范圍可滿足檢測需要。發光器以固定頻率不斷的發出光束,受光器檢測接收光束。自然狀態下,受光器可完全接收到發光器發出的光束,光幕以固定頻率持續掃描讀取數據[6],待魚體通過測量光幕時,部分光束被遮擋,其遮擋的光束為一組數據,待魚體完全通過測量光幕后,將所有的數據統計,繪制所得的魚體圖像如圖2所示。
2)頭尾調整裝置。頭尾調整裝置主要包括機架、同步帶及驅動電機等。同步帶驅動電機型號為57HBP112AL4-TFA兩相四線步進電機,外接M36J驅動器與計算機相連接。同步帶首末端均安裝有光電限位開關。
當傳送帶輸送魚體經過測量光幕,測量光幕掃描魚體圖像,發送至控制器,判斷魚的頭尾和腹背朝向、體態數據等。如圖3所示為頭尾調整工作原理圖,若檢測結果為頭前尾后,則不向后續同步帶驅動電機發送指令,移動平板位于原點處(同步帶中心位置)。魚體在傳送帶帶動下向前輸送,在傳送帶末端掉落到弧形滑軌中,保持頭前尾后姿態輸出。檢測結果為尾前頭后,計算機向同步帶驅動電機發送運動指令,帶動移動平板向傳送帶末端移動,平板到位后觸發光電限位開關,自動停靠在傳送帶末端。傳送帶末端布置有光電開關,待魚體到達傳送帶末端時,遮擋光電開關,根據繪制的魚體圖像,分析計算魚體長度及重心位置,設定合適的延遲時間,待魚體一部分移動到平板上后,同步帶驅動電機反轉,速度與傳送帶速度一致,保證魚體在不掉落的情況下,向前繼續運送待魚體離開傳送帶末端,因魚體一部分搭在平板上,魚體在重力作用下掉落,翻轉落入弧形滑道,最后保證頭前尾后向前運送。
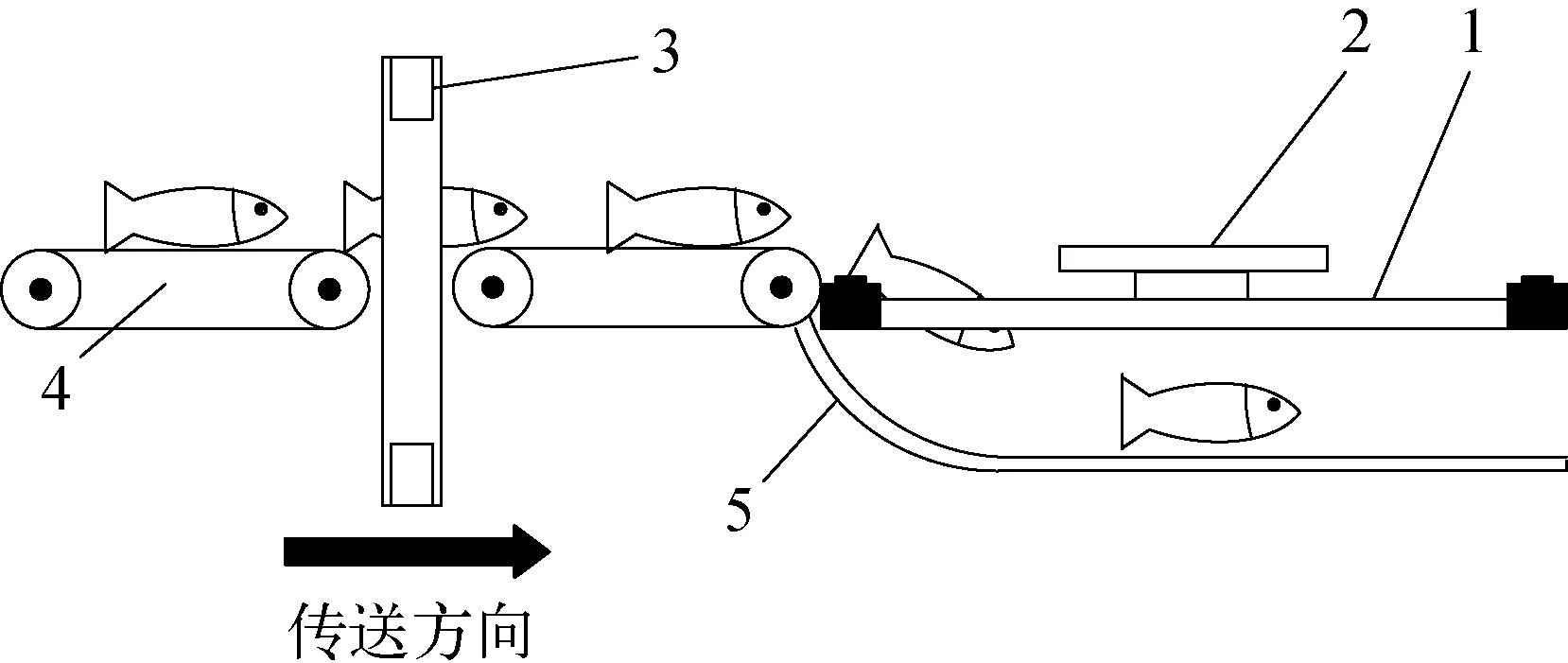
(a)頭前尾后
2 控制系統算法實現
2.1 控制系統整體控制流程
采用Modbus RTU通訊協議[7],通過RS485問答方式與測量光幕和步進電機M36J驅動器通訊,在Matlab環境中開發控制系統,系統總體控制流程圖如圖4所示。
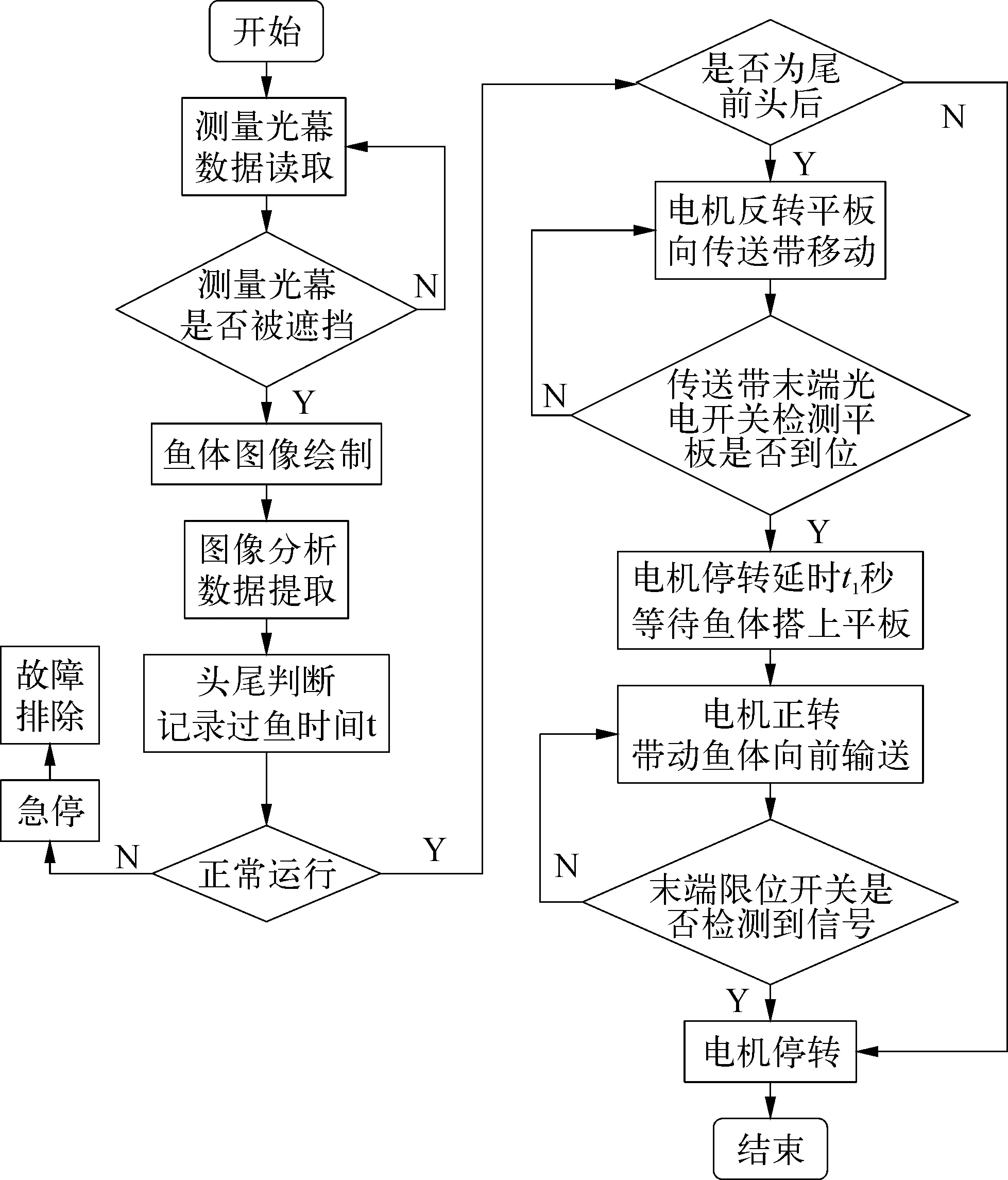
圖4 控制系統總體流程圖
為方便操作者監測魚體狀態及各項數據,實時調整各項參數,設計Matlab GUI控制界面[8],如圖5所示。控制界面包括操作控制區、參數配置區、圖像顯示區及狀態顯示欄4部分。操作控制區包括開關按鈕、調整平板復位按鈕等,可以控制程序總體啟停,平板初始化。參數配置區可設置平板等待時間與魚體經過測量光幕時間的比例參數、調整平板移動速度。
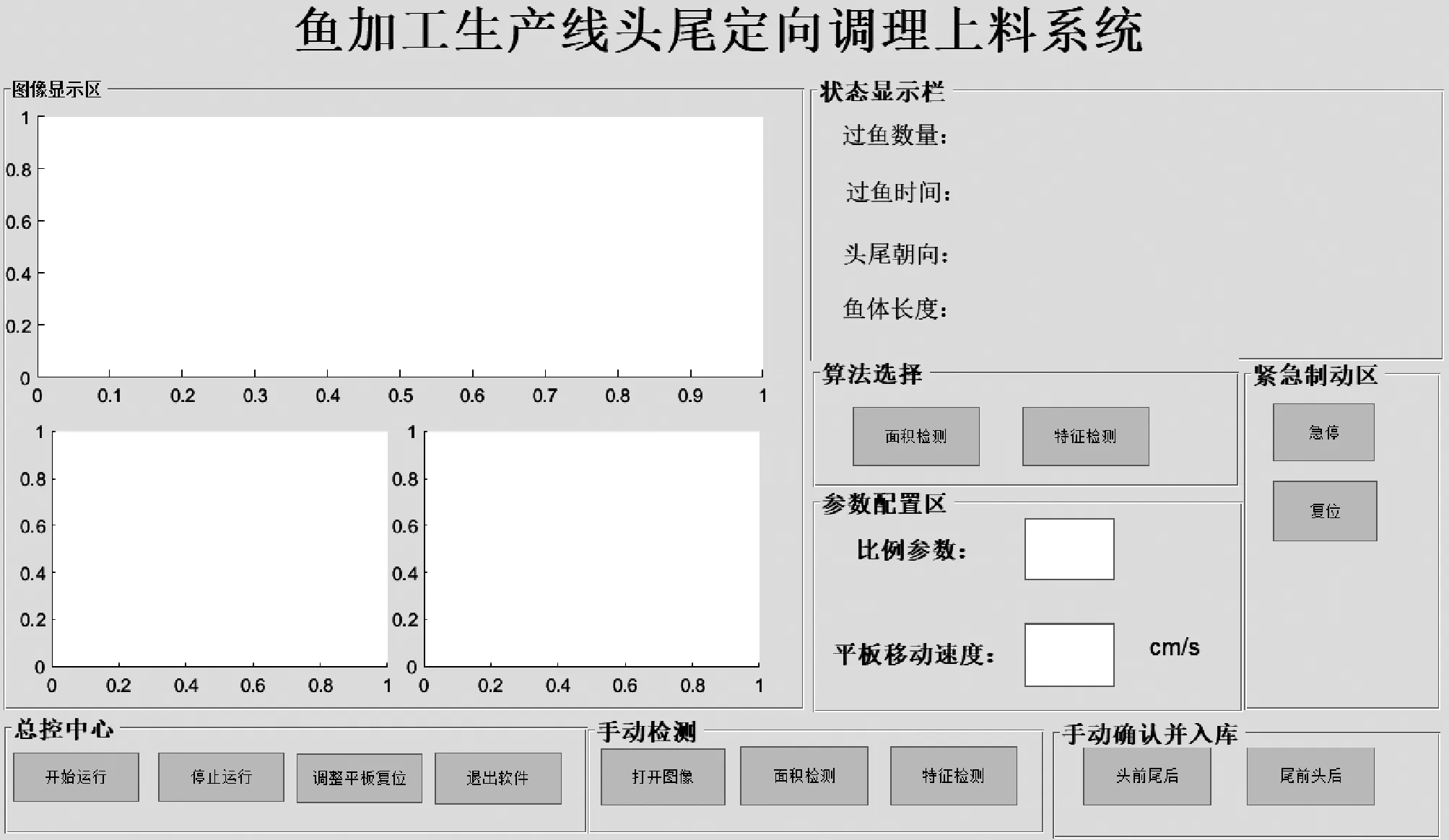
圖5 GUI控制界面
t1=t/n
(1)
式中:t1——平板等待時間;
t——魚體經過光幕的時間;
n——比例參數。
圖像顯示區包括三個圖窗,其中上部較大的圖窗可以顯示魚體輪廓曲圖像,下側圖像分別顯示魚體頭尾曲線擬合圖,便于操作者實時監測控制系統頭尾識別過程。狀態顯示欄可以顯示調整的魚體數量、時間、魚體長度及頭尾方向。
2.2 魚體的頭尾識別
魚體圖像處理控制流程如圖6所示。
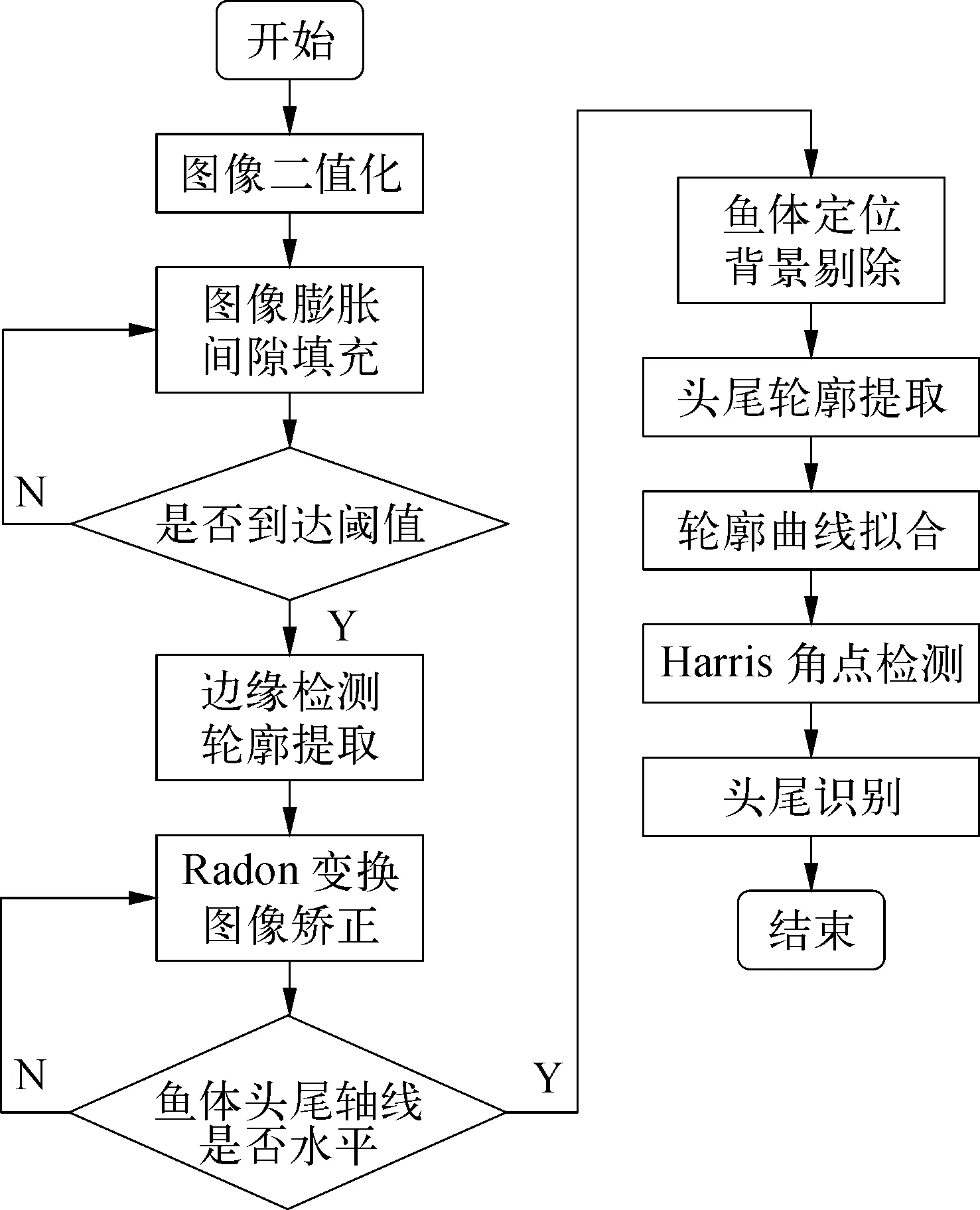
圖6 魚體圖像處理流程圖
2.2.1 圖像預處理
光幕檢測較為敏感,可精準的檢測魚體輸送過程中是否發生歪斜,同時掃描的魚體截面間隙較大,需對圖像進行預處理。魚體截面圖由多組不同長度的直線組成,將圖像轉換為二值圖像,根據圖像間隙特征,進行閾值尋優,選定構建半徑為11的平面圓盤形的結構元素對其執行形態學膨脹處理[9],可保證圖像基本特征不變的前提下,將松散的直線連通。
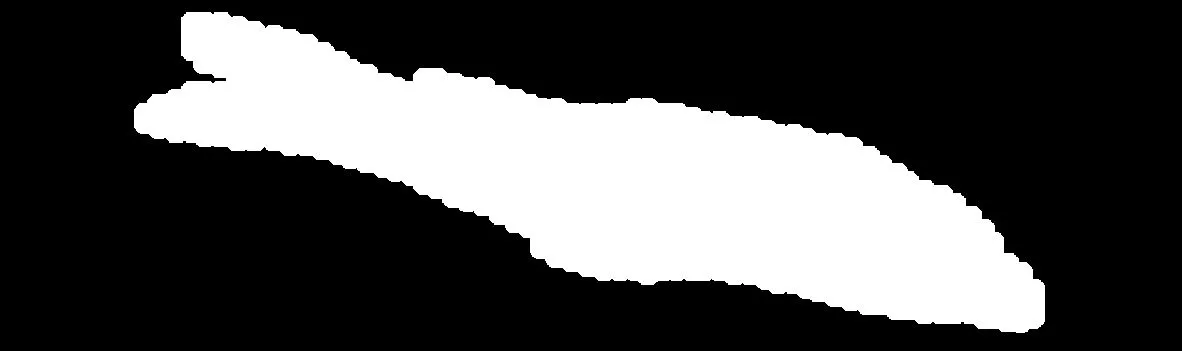
圖7 膨脹后的圖像
圖像間隙填充完成后,需對魚體邊緣輪廓進行提取,Canny算法受噪聲影響較小,保存的邊緣信息最完整[10],因此使用Canny邊緣檢測算法提取圖像輪廓。Canny邊緣檢測分為以下四步。
1)高斯濾波:使用高斯濾波對圖像進行去噪,使圖像變得平滑,高斯函數是一個類似與正態分布的中間大兩邊小的函數。對于一個位置(m,n)的像素點,其灰度值(這里只考慮二值圖)為f(m,n)。經高斯濾波后的灰度值
(2)
式中:gσ——經高斯濾波后的圖像灰度值;
f(m,n)——(m,n)點處圖像的灰度值;
σ——標準差。
2)計算梯度幅值及方向:灰度值變化較大的像素點的集合即為邊緣。在圖像中,用梯度來表示灰度值的變化程度和方向。通過式(3),式(4)計算梯度幅值和方向。
(3)
(4)
式中:G(m,n)——圖像邊緣的梯度幅值;
α——圖像邊緣的梯度方向;
gx(m,n)——x方向梯度幅值;
gy(m,n)——y方向梯度幅值。
3)邊緣點過濾:采用非極大值抑制法[11],對邊緣點進行檢測,對每個像素點沿其梯度方向比較其前后的梯度值,若該像素點屬于邊緣,它在梯度方向上的梯度值是最大的,否則不是邊緣,將其灰度值設為0。
(5)
4)雙閾值法檢測邊緣:設置兩個閾值,分別為maxVal和minVal。其中大于maxVal的都被檢測為邊緣,而低于minVal的都被檢測為非邊緣。對于中間的像素點,如果與確定為邊緣的像素點鄰接,則判定為邊緣;否則為非邊緣。
經Canny邊緣檢測算法提取后的魚體輪廓圖如圖8所示,其邊線較為模糊,對輪廓圖執行形態學開運算[12],對圖像輪廓進行增強,優化后圖像如圖9所示。
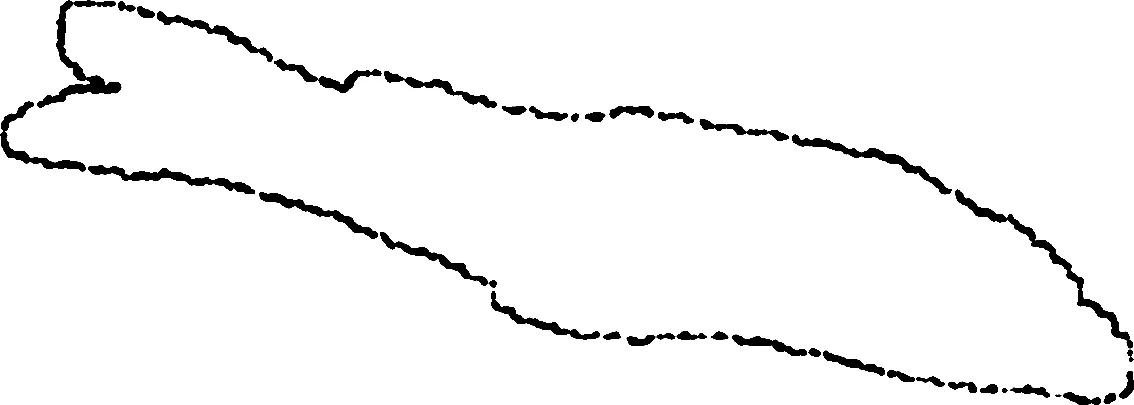
圖8 圖像輪廓提取
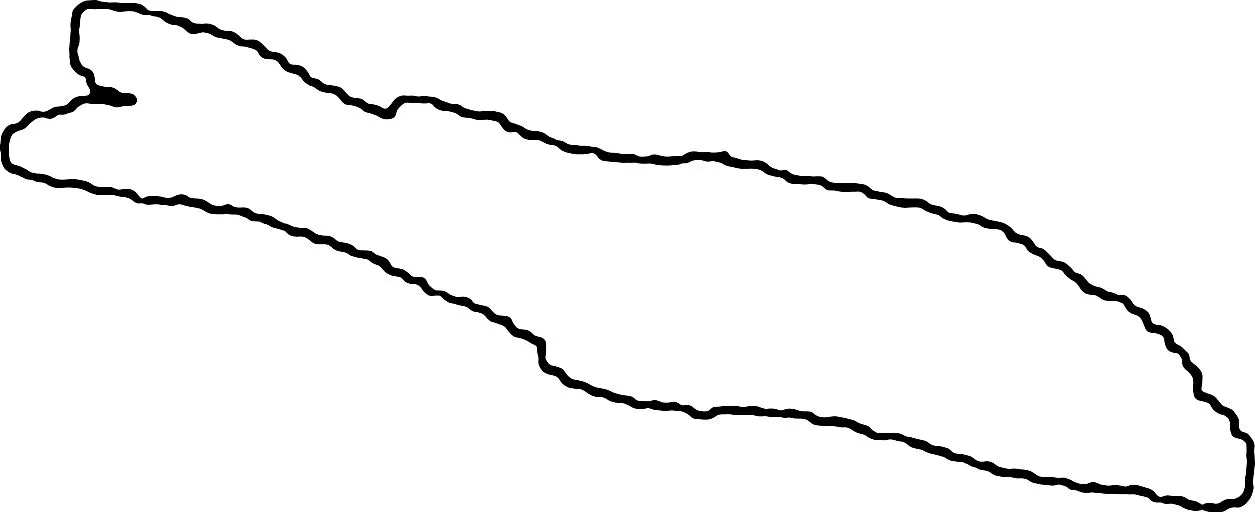
圖9 優化圖像輪廓
在測量光幕前端有導向裝置可對魚體起到一定梳理導向的作用,測量光幕檢測精度可達2.5 mm,在外界的干擾下魚身難免會發生偏移,如圖8則為發生偏移的魚體圖像,為增加頭尾腹背檢測可靠性,對圖像進行矯正,使魚身頭尾軸水平[13]。采用Radon變換法對魚體圖像進行矯正[14],Radon變換是一種積分變換算法,其原理是將目標圖像里經過某一點(m,n)的直線ρ=mcosθ+nsinθ,投影到對應參數空間里的一個點,其原理公式如式(6),式(7)所示。
(6)
(7)
式中:D——圖像平面;
f(m,n)——圖像中點(m,n)像素點的灰度值;
ρ——圖像中點(m,n)與原點之間的長度;
θ——該直線與原點間的垂線與x軸的角度。
Radon變換的本質是將原函數做了一個空間轉換[15]其轉換效果可理解為將圖像順時針旋轉了θ角之后映射到水平軸上。矯正后魚體圖像如圖10所示,通過邊界點追蹤定位魚體,將背景多余部分裁剪剔除,魚體定位效果如圖11所示。
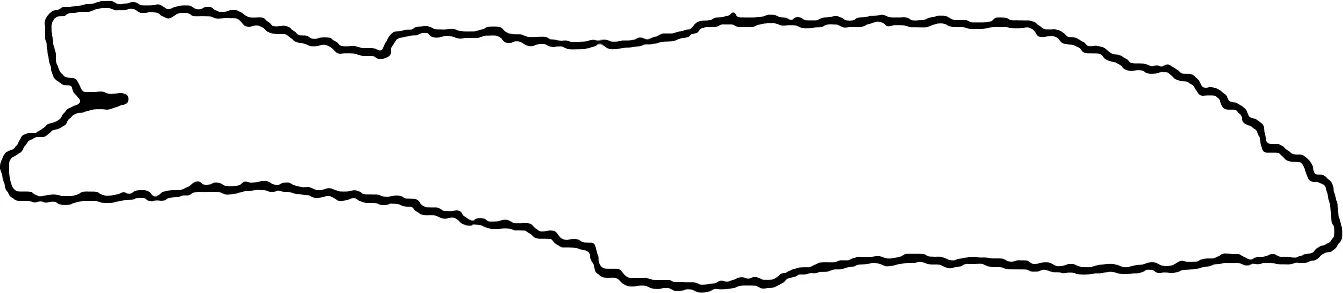
圖10 Radon變換后魚體圖像
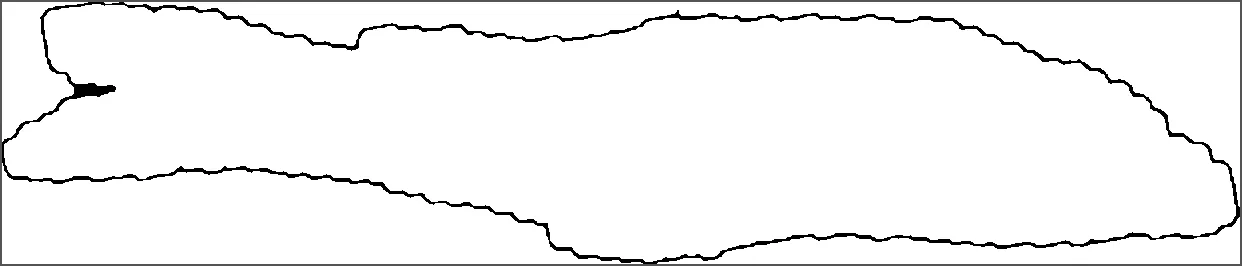
圖11 魚體定位
2.2.2 魚體頭尾識別
通過對魚體頭尾部分輪廓進行擬合,結果如圖12、圖13所示,頭部輪廓與拋物線相似,尾部形狀與三周期內正弦函數圖線相似,可利用頭尾圖像角點數量差別,對魚體頭尾進行識別。采用Harris算子[16]進行檢測識別魚體頭尾朝向。
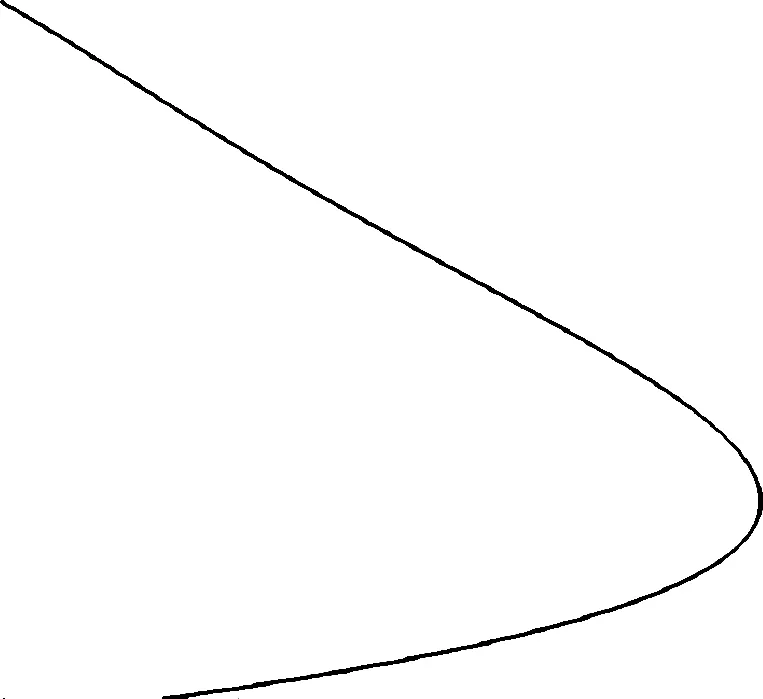
圖12 魚體頭部擬合曲線
圖13 魚體尾部擬合圖線
Harris算子是1988年由Chris Harris等提出的[17],具有旋轉不變性的角點相應測度。其檢測原理如下:通過控制特定像素大小的選框在圖像中移動,選框移動過程中,計算其移動前后灰度值的變化,若選框在某一方向移動中,灰度值發生突變,則判定為該選框部分存在有角點。
圖像I(x,y)在點(x,y)處平移(u,v)后產生的灰度變化E(x,y,u,v)如式(8)所示。
I(x,y)]2
(8)
式中:S——移動選框的區域;
w(x,y)——窗口函數(可以為常數或是高斯函數);
I(x+u,y+v)——平移后的圖像灰度;
I(x,y)——平移前的圖像灰度。
對平移后的圖像灰度公式I(x+y,u+v)進行泰勒展開
(9)
灰度變化可寫為
(10)

(11)
M是關于x,y的二階函數,因此E(x,y,u,v)是一個橢圓方程,M的特征值決定了橢圓的大小及扁率,其特征矢量決定了橢圓的方向[18]。
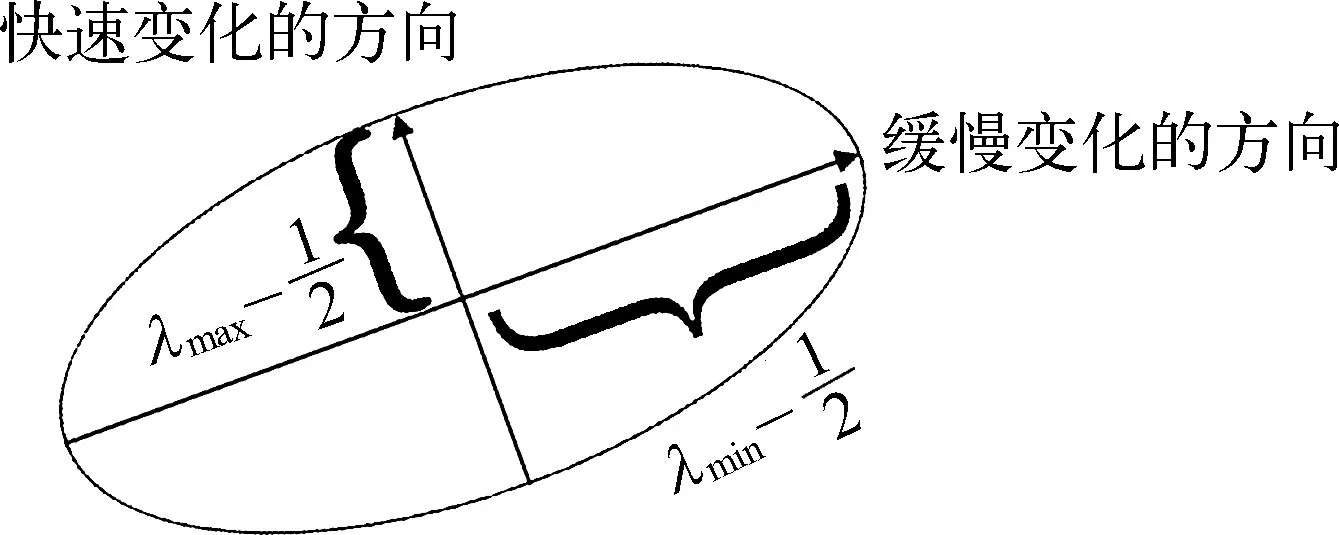
圖14 橢圓方程示意圖
使用Harris算法對魚體輪廓圖像進行檢測,檢測結果如圖15所示,尾部角點數量大于頭部角點個數,根據圖像檢測出的角點數量差別,可精準識別魚體頭尾。
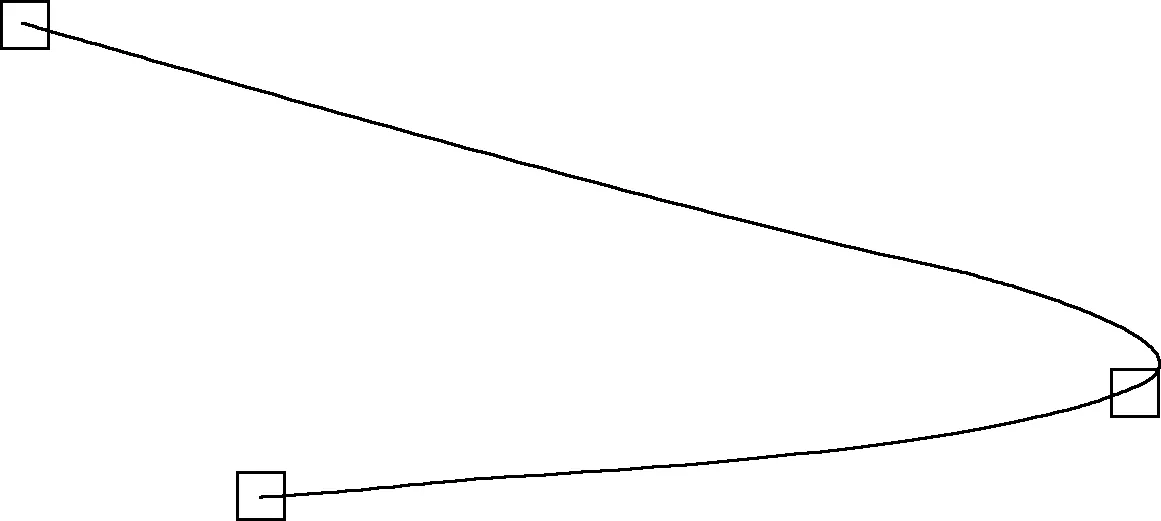
圖15 頭部輪廓檢測圖
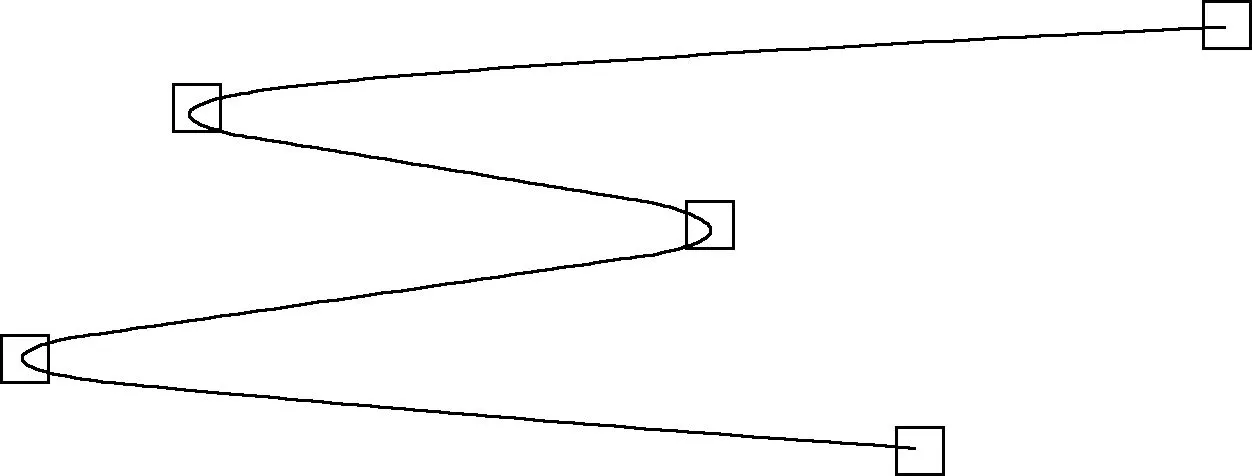
圖16 尾部輪廓檢測
3 試驗分析
為檢驗控制系統識別魚體頭尾的可靠性,購買淡水魚進行試驗,采集魚體參數及各種不同姿態的魚體圖像,檢測系統頭尾識別準確率,同時在頭尾識別成功的條件下,檢測調整裝置對魚體頭尾定向的成功率。
3.1 試驗材料
試驗采用市場購得的草魚進行試驗,為檢測系統識別準確性及調整裝置的適應性,選購的草魚長度差異較大,部分草魚參數如表1所示。
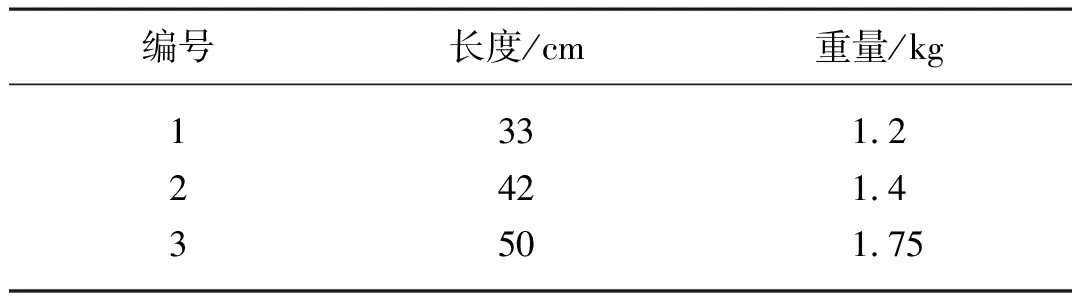
表1 草魚參數
3.2 試驗方法
為檢測輸送速度對系統識別頭尾方向的影響,同時尋找最優輸送速度,設定不同的輸送速度,每一個輸送速度下進行150次試驗,觀察系統的識別結果,試驗數據如表2所示。
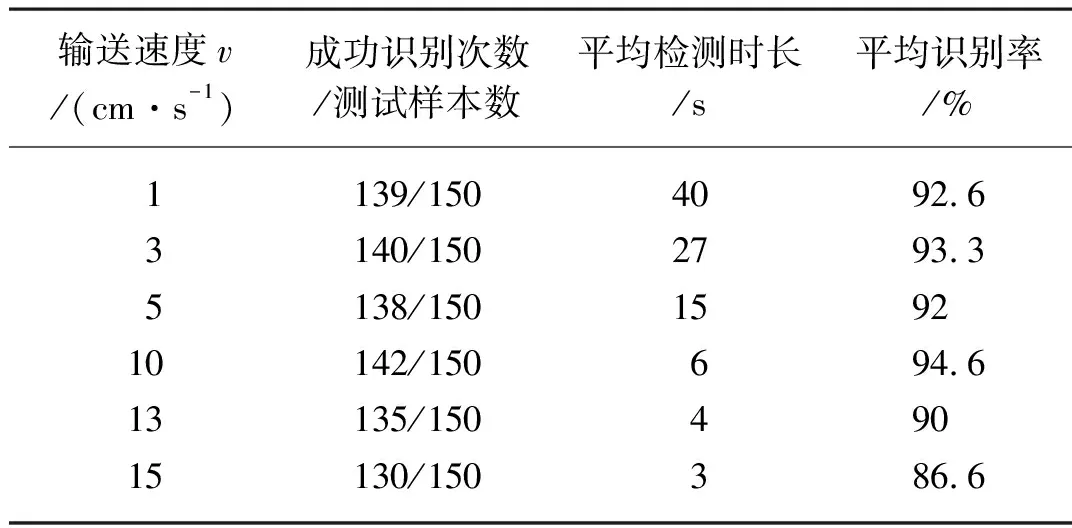
表2 輸送速度對檢測結果的影響
通過觀察光幕掃描圖像,輸送速度大于15 cm/s時,魚體經過光幕時間較短,掃描的魚體圖像中像素點較為松散,膨脹處理時圖像填充效果較差,擬合出的魚體輪廓不理想。根據試驗結果分析,輸送帶速度設定為10 cm/s時,其判斷成功率接近95%,同時檢測時長為6 s,檢測時間較短,成功率較高。
在頭尾調整部分,頭前尾后時,平板不動作,魚體能穩定掉落至弧形滑道中,頭前尾后輸送上料,其成功率為100%。尾前頭后狀態,需要進行調整,設定輸送速度均為10 cm/s,通過設定不同的n值,可改變魚尾搭上平板的長度。
l1=l/n
(12)
式中:l1——魚體搭上調整平板的長度;
l——魚體總長;
n——比例參數。
試驗數據如表3所示。
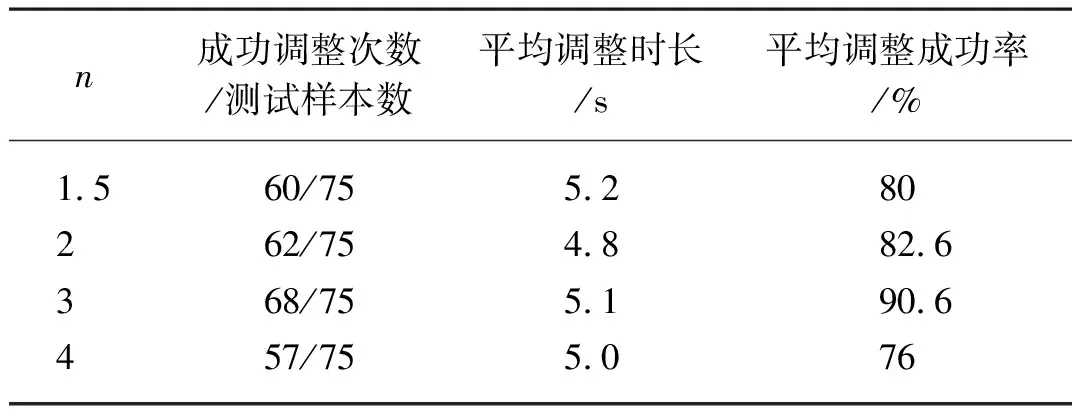
表3 不同上板長度對調整結果的影響
經試驗驗證,針對草魚,n值設置為3時,即魚體1/3搭上平板,平板開始運動,調整效果最佳,成功率可達90%,同時發現,不同上板長度對調整時長無顯著影響。
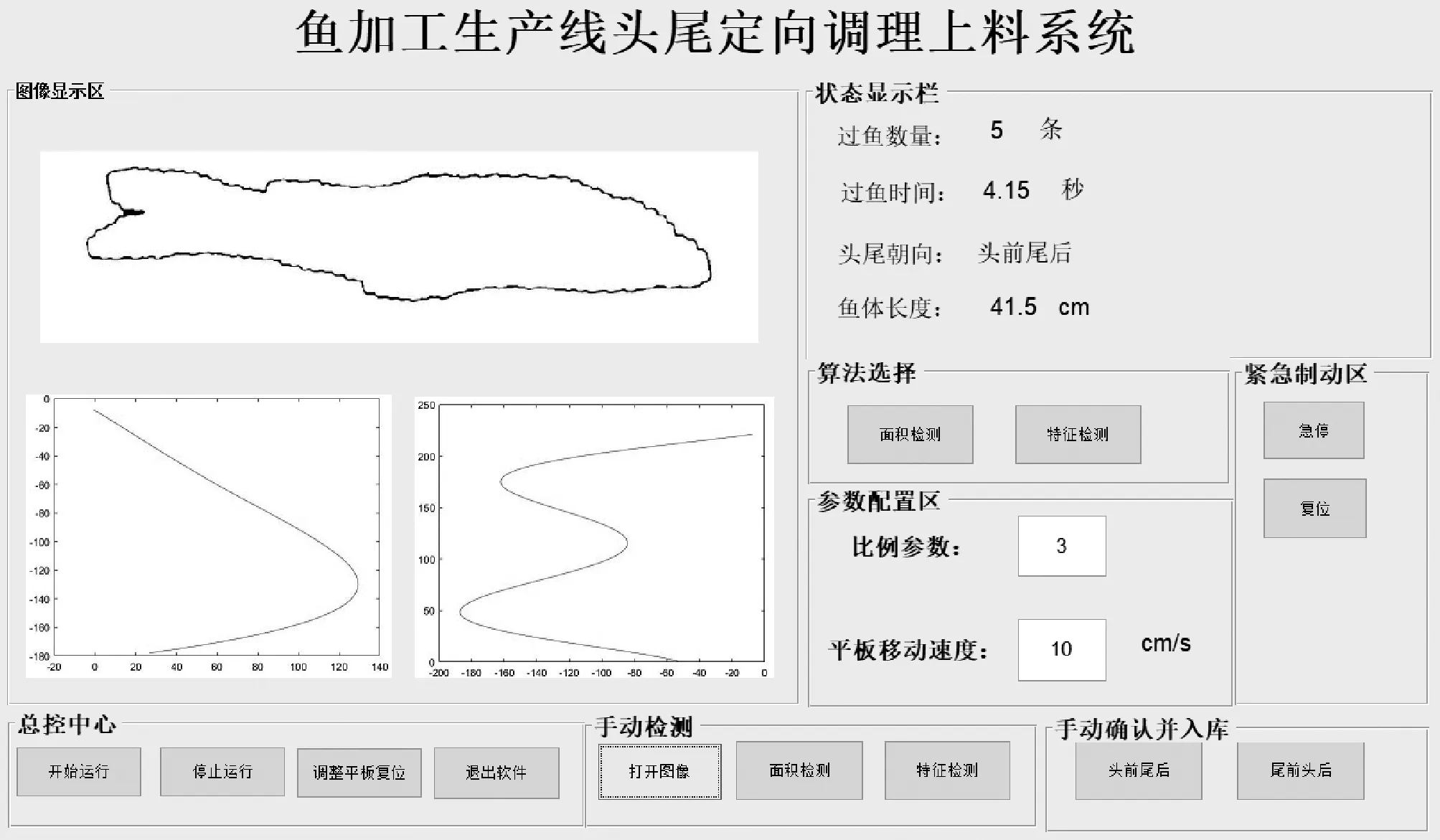
圖17 系統測試
4 結論
使用Matlab軟件,以Modbus RTU協議為通訊協議,設計了魚體頭尾調整控制系統,通過光幕掃描的魚體圖像,對魚體圖像進行處理,通過提取魚體輪廓曲線,對魚體頭尾曲線進行擬合,采用Harris角點檢測算法輔助識別頭尾方向。在此基礎上,設計了調整裝置對魚體實現頭尾定向調整。初步實驗結果表明,根據光幕掃描的魚體圖像進行頭尾檢測識別的成功率可達95%,頭尾調整裝置對魚體定向成功率可達90%,系統控制精度高,處理速度較快,可靠性較好,可滿足生產加工需求。對比當前機械加工中單純依靠魚類體態特征和機械結構實現頭尾定向,更為可靠,使用光幕掃描魚體進行頭尾定向可實現無損檢測,更容易保護魚體。
研究主要針對草魚,對于其他種類特征差別較大的魚體適用性有待進一步研究,后續將研究各種不同魚體的種類識別與頭尾定向算法。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48