車載自動(dòng)炮立靶密集度提升方法
2021-04-09 11:00:22郭競(jìng)堯閆芳君王宏金
兵器裝備工程學(xué)報(bào) 2021年3期
關(guān)鍵詞:優(yōu)化
郭競(jìng)堯,高 英,閆芳君,王宏金
(西北機(jī)電工程研究所, 陜西 咸陽 712099)
車載自動(dòng)炮類武器的戰(zhàn)略和戰(zhàn)術(shù)機(jī)動(dòng)性強(qiáng),具有快速反應(yīng)、精確打擊和自主作戰(zhàn)能力,能滿足現(xiàn)代高科技局部戰(zhàn)爭(zhēng)對(duì)火炮戰(zhàn)略機(jī)動(dòng)性及戰(zhàn)術(shù)機(jī)動(dòng)性的要求,車載自動(dòng)炮武器的射擊效能是新型車載武器系統(tǒng)總體方案論證、總體設(shè)計(jì),制定射擊法則以及有效發(fā)揮車載武器系統(tǒng)射擊效率的重要依據(jù),而立靶密集度是體現(xiàn)武器射擊效能的重要特征量[1-2]。國(guó)內(nèi)有許多學(xué)者致力于對(duì)立靶密集度展開研究:吳永亮等[3]構(gòu)建了小口徑連發(fā)武器炮口振動(dòng)控制模型;毛保全等[4]通過多學(xué)科協(xié)同仿真建立立靶密集度的計(jì)算方法;王寶元等[5]就炮口振動(dòng)對(duì)立靶密集度影響進(jìn)行了試驗(yàn)研究;趙博一等[6]研究了動(dòng)力偶臂對(duì)炮口擾動(dòng)的影響;趙躍躍等[7]通過有限元建模對(duì)火炮射擊穩(wěn)定性進(jìn)行了研究。以上的研究主要是以某個(gè)結(jié)構(gòu)固化后自動(dòng)炮樣本為分析對(duì)象并進(jìn)行研究,而對(duì)還處在研制階段的自動(dòng)炮沒有形成可指導(dǎo)結(jié)構(gòu)布局優(yōu)化的方法或算法。
某車載自動(dòng)炮(后也稱自動(dòng)炮)處于研制階段時(shí)出現(xiàn)需開展密集度提升的具體問題,本文針對(duì)該問題進(jìn)行了研究。
1 問題來源
該自動(dòng)炮采用埋頭彈發(fā)射原理彈藥、外能源驅(qū)動(dòng)、無鏈?zhǔn)焦棧軌虼蠓嵘鹋谕Σ⒈3州^小的體積,是面向新一代戰(zhàn)車研制的主炮。研制方案受限于火力總體布局及指標(biāo)約束,貫徹了輕量化及小型化的總體設(shè)計(jì)思路,初始設(shè)計(jì)狀態(tài)為:全炮緩沖器采用單緩沖器方案,緩沖器軸線平行布置于身管軸線正上方155 mm處,全炮后坐部分質(zhì)心位于身管軸線下方21 mm處,見圖1所示。
圖1 某自動(dòng)炮初始設(shè)計(jì)狀態(tài)簡(jiǎn)圖
在首次立靶密集度試驗(yàn)中,高低向結(jié)果較差,亟需進(jìn)行立靶密集度提升研究,立靶射擊散布見圖2所示。

圖2 初始狀態(tài)下連發(fā)射擊散布(110 m靶距)圖
此處使用射彈散布的中間誤差來表示射擊密集度[8],再將中間誤差計(jì)算結(jié)果結(jié)合炮口與立靶直線距離換算成以密位/mil的角度計(jì)量單位,初始狀態(tài)的立靶密集度結(jié)果見表1所示。
表1 初始狀態(tài)立靶密集度結(jié)果
2 分析過程
2.1 要素定位
通常認(rèn)為動(dòng)力偶矩是影響立靶散布的主要因素,常規(guī)做法為通過結(jié)構(gòu)改變而降低動(dòng)力偶矩。但從本質(zhì)上看,高低向立靶散布是受彈丸出炮口時(shí)刻身管瞬時(shí)高低向炮口角影響,而瞬時(shí)高低向炮口角幅度主要受自動(dòng)炮高低向平面內(nèi)對(duì)后坐部分質(zhì)心的角動(dòng)量量值影響。
以L表示角動(dòng)量,M表示作用在物體上的合力對(duì)定點(diǎn)O的力矩,物體對(duì)定點(diǎn)O的角動(dòng)量的微分形式為
dL=Mdt
(1)
作用在物體上的力矩和時(shí)間的乘積為元沖量矩,若力矩M隨時(shí)間變化,在t1到t2時(shí)間間隔內(nèi)的沖量矩,以K表示沖量矩,即

(2)
物體對(duì)定點(diǎn)O的角動(dòng)量在某一時(shí)間間隔內(nèi)的增量等于在該時(shí)間間隔內(nèi)作用于物體的沖量矩。
為簡(jiǎn)化分析過程剔除低關(guān)聯(lián)因素,依據(jù)工程經(jīng)驗(yàn)提出如下基本假設(shè):① 托架、搖架均視為剛性體;② 火炮導(dǎo)軌間隙選取合理;③ 忽略火炮零部件間接觸和碰撞。分析得出影響自動(dòng)炮立靶密集度的主要成因?yàn)椋孩?后坐部分質(zhì)心偏離身管軸線;② 緩沖器軸線偏離后坐部分質(zhì)心。
2.2 量化分析
由上述主要成因形成系統(tǒng)性激勵(lì),從而影響自動(dòng)炮立靶密集度的物理過程推定為:① 炮膛合力對(duì)后坐部分質(zhì)心形成扭矩(即動(dòng)力偶矩)在膛壓作用時(shí)間內(nèi)產(chǎn)生的沖量矩;② 全炮緩沖器作用力對(duì)后坐部分質(zhì)心形成扭矩在緩沖過程內(nèi)所產(chǎn)生的沖量矩。以上兩種激勵(lì)要素的作用見圖3所示。
圖3 激勵(lì)要素作用示意圖
自動(dòng)炮本體認(rèn)為是復(fù)雜剛?cè)狁詈象w,順時(shí)針與逆時(shí)針方向力矩并非抵消,而是對(duì)自動(dòng)炮產(chǎn)生復(fù)雜性激勵(lì),在計(jì)算時(shí)沖量矩均取正值。得到兩種激勵(lì)要素的算法為
(3)
圖3和式(3)中Mt、Kt為炮膛合力對(duì)后坐部分質(zhì)心的產(chǎn)生的力矩和該力矩作用的沖量矩;Mh、Kh為全炮緩沖器緩沖過程中對(duì)后坐部分質(zhì)心產(chǎn)生的力矩和該力矩作用的沖量矩;P(t)為內(nèi)彈道壓力;S為彈丸橫截面積;lt為炮膛合力對(duì)后坐部分質(zhì)心的作用力臂;F(t)為火炮后坐力;lh為后坐力對(duì)后坐部分質(zhì)心的作用力臂;t1、t2為內(nèi)彈道壓力產(chǎn)生力矩起止時(shí)間;t3、t4為后坐力產(chǎn)生力矩起止時(shí)間。
該自動(dòng)炮彈藥采用埋頭彈發(fā)射原理有別于傳統(tǒng)彈藥,其內(nèi)彈道過程可分為前后兩個(gè)階段,分別為底火擊發(fā)引燃點(diǎn)火藥推動(dòng)彈丸在藥筒內(nèi)的導(dǎo)向管中運(yùn)動(dòng)直至彈丸彈帶嵌入身管起始部,和發(fā)射藥點(diǎn)燃推動(dòng)彈丸直至離開炮口[9]。結(jié)合埋頭彈彈藥結(jié)構(gòu)和經(jīng)典內(nèi)彈道理論,建立數(shù)學(xué)模型:前階段的算法為
(4)
式中:時(shí)間t為自變量;p為膛底壓力;ψb為點(diǎn)火藥已燃百分?jǐn)?shù);χb和λb為點(diǎn)火藥的形狀特征量;Zb為點(diǎn)火藥己燃相對(duì)厚度;u1b和n1b分別為點(diǎn)火藥的燃速系數(shù)和燃速指數(shù);e1b為點(diǎn)火藥弧厚的一半;Zbk為點(diǎn)火藥燃燒結(jié)束點(diǎn)相對(duì)弧厚;vb為彈丸運(yùn)動(dòng)速度;S為彈丸最大橫截面積;φb為彈丸在導(dǎo)向管中運(yùn)動(dòng)的次要功系數(shù);m為彈丸質(zhì)量;lb為彈丸在導(dǎo)向管內(nèi)行程;fb為點(diǎn)火藥的火藥力;l0b為前階段藥室容積縮徑長(zhǎng);lψb為前階段藥室自由容積縮徑長(zhǎng);mb為點(diǎn)火藥裝藥量;ρb為點(diǎn)火藥密度;αb為點(diǎn)火藥燃?xì)庥嗳荩沪萣=kb-1,kb為點(diǎn)火藥燃?xì)獗葻岜龋籚0b為前階段藥室容積,pbs為點(diǎn)火藥著火壓力判據(jù)。初始條件為
后階段將前階段終態(tài)作為此階段初態(tài),其算法為
(5)
式中:ψ為發(fā)射藥已燃百分?jǐn)?shù);χ和λ為發(fā)射藥的形狀特征量;Z為發(fā)射藥己燃相對(duì)厚度;u1和n1分別為發(fā)射藥的燃速系數(shù)和燃速指數(shù);e1為點(diǎn)火藥弧厚的一半;Zk為發(fā)射藥燃燒結(jié)束點(diǎn)相對(duì)弧厚;ps為發(fā)射藥著火壓力判據(jù);φ為彈丸在身管中運(yùn)動(dòng)的次要功系數(shù);V0為后階段藥室容積;l為彈丸在身管內(nèi)行程;l0為后階段藥室容積縮徑長(zhǎng);lψ為后階段藥室自由容積縮徑長(zhǎng);mω和ρ為發(fā)射藥裝藥質(zhì)量密度;α為發(fā)射藥燃?xì)庥嗳荩籪為發(fā)射藥火藥力;θ=k-1,k為發(fā)射藥燃?xì)獗葻岜取3跏紬l件:l、v、ψb、Zb在后階段初值為前階段的終值,ψ=0,Z=0,p=p1V0b/V0,p1為前一階段壓力終值。
得到常溫內(nèi)彈道壓力-時(shí)間(P-t)曲線見圖4所示。
圖4 殺爆彈P-t曲線
全炮緩沖器采用液壓彈簧式工作原理,建立的全炮運(yùn)動(dòng)微分方程為[10-11]
(6)
式中:mh為后坐部分質(zhì)量;x為自動(dòng)炮相對(duì)搖架的位移,后坐為正,靜平衡位置為原點(diǎn);Fpt為炮膛合力,作用線與炮膛軸線重合;Ff為自動(dòng)炮前沖過位的緩沖簧力;Fh為緩沖簧力;FΦ為緩沖器液壓阻力;FT為導(dǎo)軌摩擦力;θ為自動(dòng)炮高低射角。
圖5 后坐力F-t曲線
以圖4、圖5和結(jié)構(gòu)參數(shù)可得到兩項(xiàng)要素對(duì)后坐部分質(zhì)心的力矩-時(shí)間(M-t)曲線(見圖6)。
圖6 兩種激勵(lì)要素M-t曲線
利用式(3)可得兩種激勵(lì)要素的量值,計(jì)算出激勵(lì)要素的總值為281.4 N·m·s,其中緩沖器緩沖過程產(chǎn)生的沖量矩Kh占比89.52%,炮膛合力產(chǎn)生的沖量矩Kt占比10.48%,結(jié)果表明緩沖器的偏離后坐質(zhì)心式布局是影響密集度的主要因素而非動(dòng)力偶矩。
3 優(yōu)化及驗(yàn)證
根據(jù)激勵(lì)要素的量化分析結(jié)果,分別對(duì)樣機(jī)的緩沖器布局及后坐質(zhì)心位置進(jìn)行結(jié)構(gòu)優(yōu)化,再進(jìn)行驗(yàn)證。
3.1 結(jié)構(gòu)優(yōu)化
緩沖器布局優(yōu)化為:緩沖器由單緩沖器偏上布局,改為雙緩沖器對(duì)稱后坐質(zhì)心布局,雙緩沖器組合的預(yù)壓力、剛度及液壓阻尼與單緩沖器相同,優(yōu)化后雙緩沖器質(zhì)量和與單緩沖器質(zhì)量接近,緩沖器布局改變使全炮后坐部分質(zhì)心下移至身管軸線下方26 mm處,狀態(tài)見圖7所示。
1.身管軸線; 2.緩沖器軸線; 3.后坐部分質(zhì)心
優(yōu)化質(zhì)心位置措施:增設(shè)了配重體,同樣采用雙緩沖器且對(duì)稱配重后的后坐質(zhì)心布局,配重質(zhì)量約為后坐總質(zhì)量的5%,全炮后坐部分質(zhì)心調(diào)整至身管軸線正下方5 mm處,狀態(tài)見圖8所示。
1.身管軸線; 2.緩沖器軸線; 3.后坐部分質(zhì)心; 4.配重體
對(duì)兩種優(yōu)化狀態(tài)進(jìn)行計(jì)算,與初始狀態(tài)下的M-t曲線和沖量矩見圖9、圖10所示。
圖9 優(yōu)化前后的M-t對(duì)比曲線
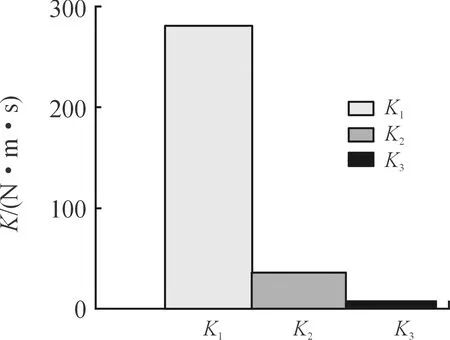
圖10 優(yōu)化前后的沖量矩
圖9、圖10中M1、K1為初始狀態(tài)的力矩代數(shù)和及作用產(chǎn)生的沖量矩;M2、K2為緩沖器布局優(yōu)化后的力矩代數(shù)和及作用產(chǎn)生的沖量矩;M3、K3為質(zhì)心位置優(yōu)化后的力矩代數(shù)和及作用產(chǎn)生的沖量矩。
從量化結(jié)果看,結(jié)構(gòu)優(yōu)化后的兩種狀態(tài)對(duì)射擊穩(wěn)定性影響的沖量矩值較優(yōu)化前已大幅下降。
3.2 驗(yàn)證
緩沖器布局優(yōu)化狀態(tài)、后坐部分質(zhì)心優(yōu)化狀態(tài)分別進(jìn)行了殺爆彈的連發(fā)射擊試驗(yàn),立靶散布見圖11、圖12所示,實(shí)測(cè)結(jié)果見表2所示。
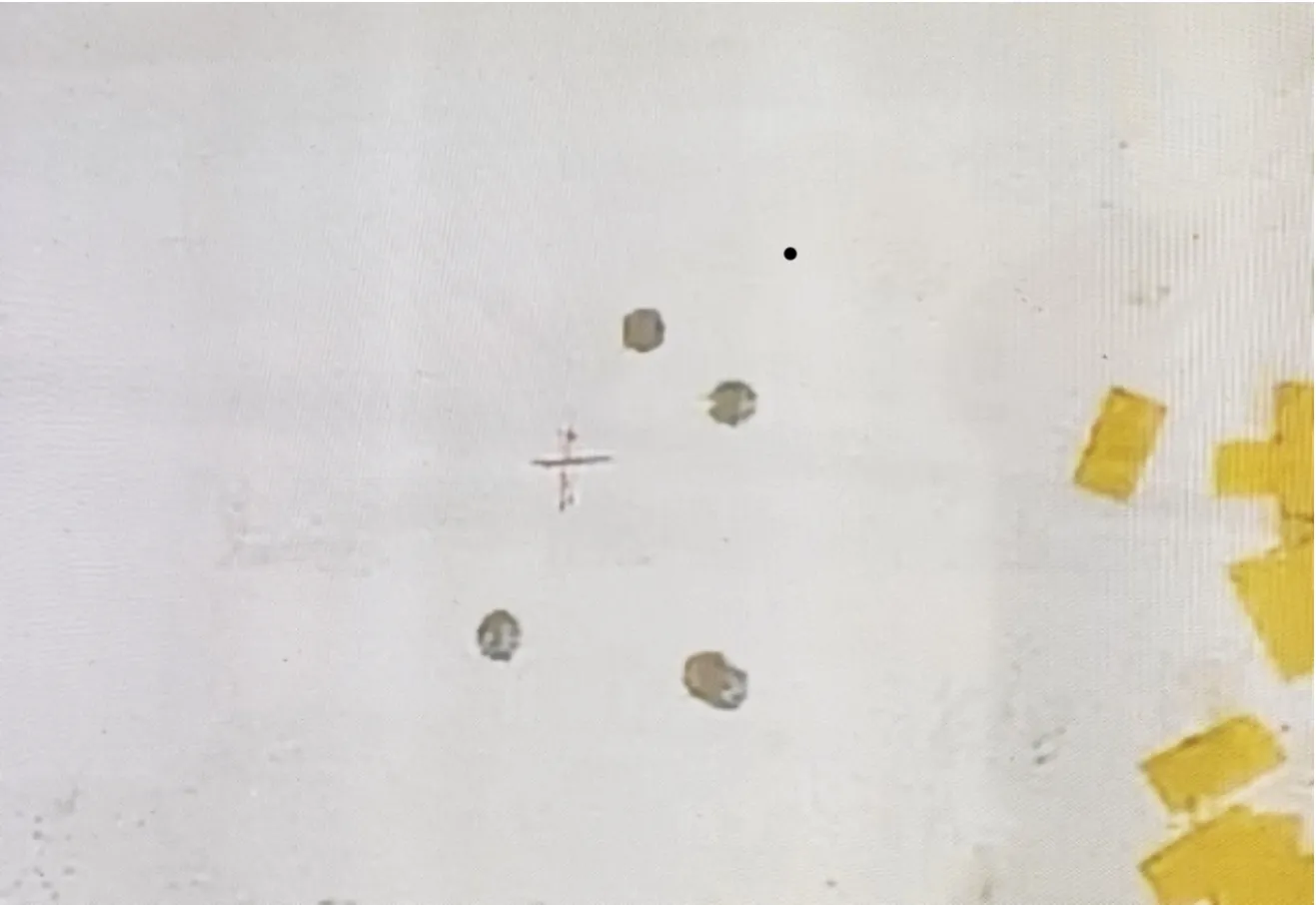
圖11 緩沖器布局優(yōu)化后連發(fā)立靶散布圖(200 m靶距)

圖12 質(zhì)心位置優(yōu)化后連發(fā)射擊散布圖(200 m靶距)
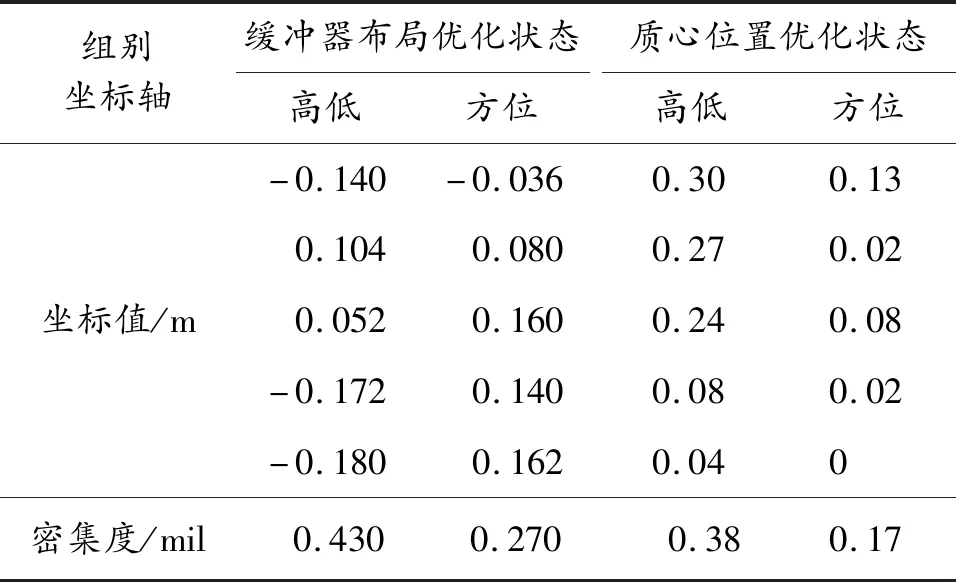
表2 優(yōu)化狀態(tài)立靶密集度結(jié)果
4 結(jié)論
1) 兩種布局優(yōu)化后立靶密集度大幅提升,緩沖器軸線偏離后坐部分質(zhì)心布置是影響該車載炮立靶密集度最主要的因素。
2) 在緩沖器軸線移至后坐部分質(zhì)心后動(dòng)力偶矩的繼續(xù)減小對(duì)立靶密集度改善貢獻(xiàn)較小。
3) 緩沖器布局優(yōu)化方案更符合武器系統(tǒng)輕量化設(shè)計(jì)的初衷,可指導(dǎo)車載自動(dòng)炮設(shè)計(jì)以及其結(jié)構(gòu)方案優(yōu)化。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
