裝甲車輛磁流變座椅振動(dòng)控制方法研究
2021-04-09 11:00:14唐志勇朱洪濤
兵器裝備工程學(xué)報(bào) 2021年3期
唐志勇,朱 煒,朱洪濤
(南京理工大學(xué) 發(fā)射動(dòng)力學(xué)研究所, 南京 210094)
良好的作業(yè)環(huán)境是保障乘員戰(zhàn)斗力的重要因素,而提高座椅懸架的減振性能是改善乘員的作業(yè)環(huán)境最簡(jiǎn)單有效的方法。當(dāng)前座椅懸架的形式主要有三種:被動(dòng)式座椅懸架、主動(dòng)式座椅懸架和半主動(dòng)式座椅懸架[1]。傳統(tǒng)的被動(dòng)式座椅懸架由剛度固定的彈簧和阻尼固定的阻尼器組成,它是根據(jù)特定的行駛狀況進(jìn)行設(shè)計(jì)的,隔振性能較差,無(wú)法適應(yīng)多變的行駛路況[2]。磁流變阻尼器因其阻尼力連續(xù)可調(diào)、響應(yīng)快、耗能少等優(yōu)點(diǎn)被廣泛應(yīng)用于武器緩沖、軍用防護(hù)、軍用飛機(jī)和軍用車輛等地方[3-4]。基于磁流變阻尼器的半主動(dòng)座椅可以通過(guò)對(duì)磁流變阻尼器輸入不同電流來(lái)調(diào)節(jié)阻尼力,從而達(dá)到更好的減振效果[5-6]。空氣彈簧具有變剛度、吸振降噪性能好、重量輕、使用壽命長(zhǎng)等特點(diǎn),被應(yīng)用于半主動(dòng)懸架的剛度控制[7]。
<1),且各件產(chǎn)品是否為不合格品相互獨(dú)立.
目前大部分半主動(dòng)座椅都是通過(guò)調(diào)節(jié)阻尼提高減振性能,對(duì)剛度和阻尼聯(lián)合調(diào)節(jié)的研究很少。國(guó)內(nèi)外學(xué)者對(duì)半主動(dòng)座椅懸架阻尼調(diào)節(jié)的控制策略做了大量研究,孟小杰[8]通過(guò)遺傳算法辨識(shí)得到磁流變阻尼器的模型參數(shù),在此基礎(chǔ)上研究了座椅懸架的開(kāi)關(guān)天棚半主動(dòng)控制策略;S Gad等[9]基于磁流變阻尼器設(shè)計(jì)了一種新型半主動(dòng)座椅懸架分?jǐn)?shù)階PID控制器;Rajendiran S等[10]基于磁流變阻尼器設(shè)計(jì)了半主動(dòng)座椅懸架PID控制器和模糊控制器,研究結(jié)果表明模糊控制器控制效果更好;Nguyen S D等[11]提出了一種新型神經(jīng)模糊控制器,用于汽車駕駛員座椅磁流變減振系統(tǒng);Devdutt Singh等[12]對(duì)磁流變阻尼器進(jìn)行多項(xiàng)式建模,設(shè)計(jì)了具有耦合規(guī)則的模糊-PID混合控制器。
本文通過(guò)模糊控制策略實(shí)現(xiàn)了半主動(dòng)座椅的剛度和阻尼聯(lián)合調(diào)節(jié),進(jìn)行了隨機(jī)路面下的動(dòng)力學(xué)仿真,為變剛度變阻尼座椅懸架的工程應(yīng)用提供了理論基礎(chǔ)。
1 磁流變阻尼器模型建立
1.1 磁流變阻尼器的力學(xué)模型
磁流變液阻尼器在力學(xué)性能上具有強(qiáng)烈的非線性,而B(niǎo)ouc-Wen模型[13-14]是工程上廣泛使用的一種阻尼器的遲滯非線性力學(xué)模型,它能夠較好的體現(xiàn)磁流變阻尼器的遲滯現(xiàn)象,也能夠準(zhǔn)確的計(jì)算出阻尼器的力-位移和力-速度曲線。磁流變阻尼器的Bouc-Wen模型如圖1所示。
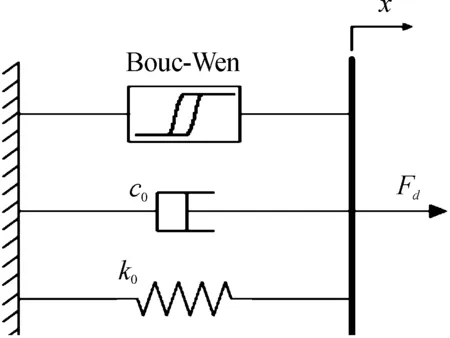
圖1 阻尼器Bouc-Wen模型示意圖
阻尼力Fd為:

(1)

1.2 磁流變阻尼器的力學(xué)性能試驗(yàn)
本文針對(duì)美國(guó)Lord公司生產(chǎn)使用的RD-8040-1型磁流變液阻尼器進(jìn)行研究,使用W+B(Walter+Bai)力學(xué)性能試驗(yàn)機(jī)對(duì)阻尼器進(jìn)行力學(xué)性能實(shí)驗(yàn),獲得了正弦激勵(lì)下,不同電流時(shí)阻尼器的力-位移曲線。
如圖2所示利用夾具將磁流變阻尼器固定于W+B疲勞試驗(yàn)機(jī)上,直流電流源對(duì)阻尼器供電,施加電流分別為0 A、0.2 A、0.4 A、0.6 A、0.8 A、1 A,控制電腦使W+B試驗(yàn)機(jī)產(chǎn)生正弦激勵(lì),頻率為2 Hz,振幅為10 mm,試驗(yàn)采樣頻率為1 000。
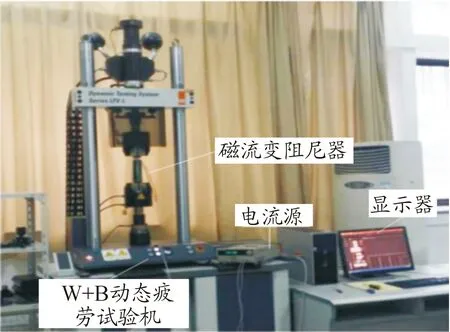
圖2 磁流變阻尼器力學(xué)性能試驗(yàn)現(xiàn)場(chǎng)
通過(guò)改變W+B試驗(yàn)機(jī)的激勵(lì)和磁流變阻尼器的控制電流,得到多組阻尼力和位移的數(shù)據(jù),使用MATLAB進(jìn)行數(shù)據(jù)處理,得到如圖3所示的10 mm 2 Hz激勵(lì)下磁流變阻尼器的力-位移曲線。
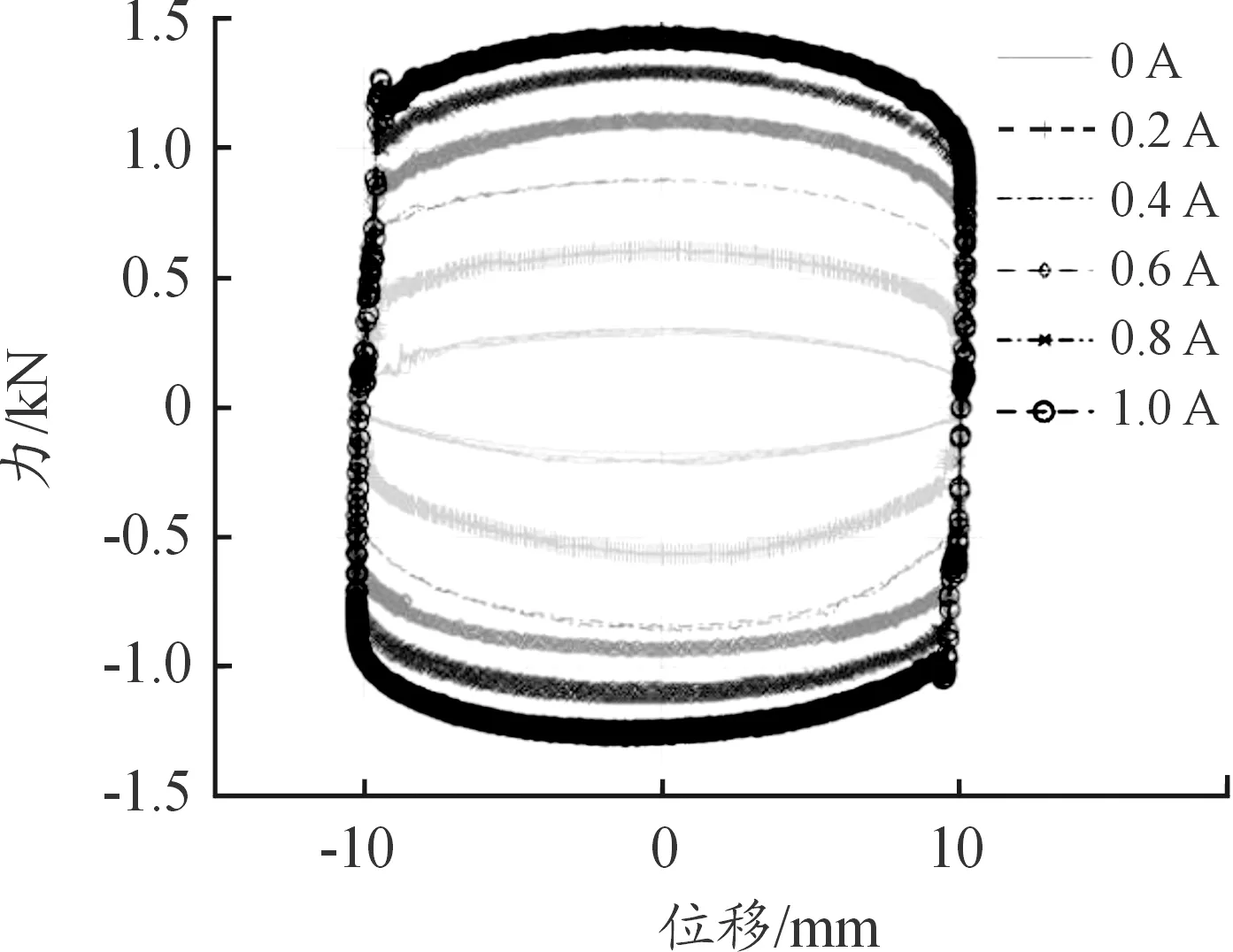
圖3 阻尼器力-位移曲線
1.3 Bouc-Wen模型參數(shù)識(shí)別
為了使基于Bouc-Wen模型的計(jì)算結(jié)果吻合于實(shí)驗(yàn)的結(jié)果,本文選用遺傳算法進(jìn)行參數(shù)識(shí)別。利用Matlab中自帶的遺傳算法工具箱進(jìn)行遺傳算法的參數(shù)識(shí)別,參數(shù)擬合結(jié)果為式(2)。
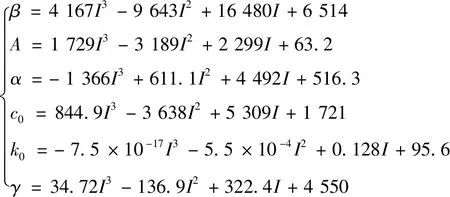
(2)
式中,I為磁流變阻尼器的輸入電流。
對(duì)10 mm 2 Hz激勵(lì)下阻尼器數(shù)據(jù)進(jìn)行擬合,電流分別為0 A、0.2 A、0.4 A、0.6 A、0.8 A、1 A,圖4是磁流變阻尼器實(shí)驗(yàn)數(shù)據(jù)與擬合數(shù)據(jù)曲線。從圖中可看出,遺傳算法識(shí)別參數(shù)擬合出的紅色虛線與實(shí)驗(yàn)得到黑色實(shí)線基本吻合,所以該Bouc-Wen模型可以真實(shí)的反映磁流變阻尼器實(shí)際出力情況。
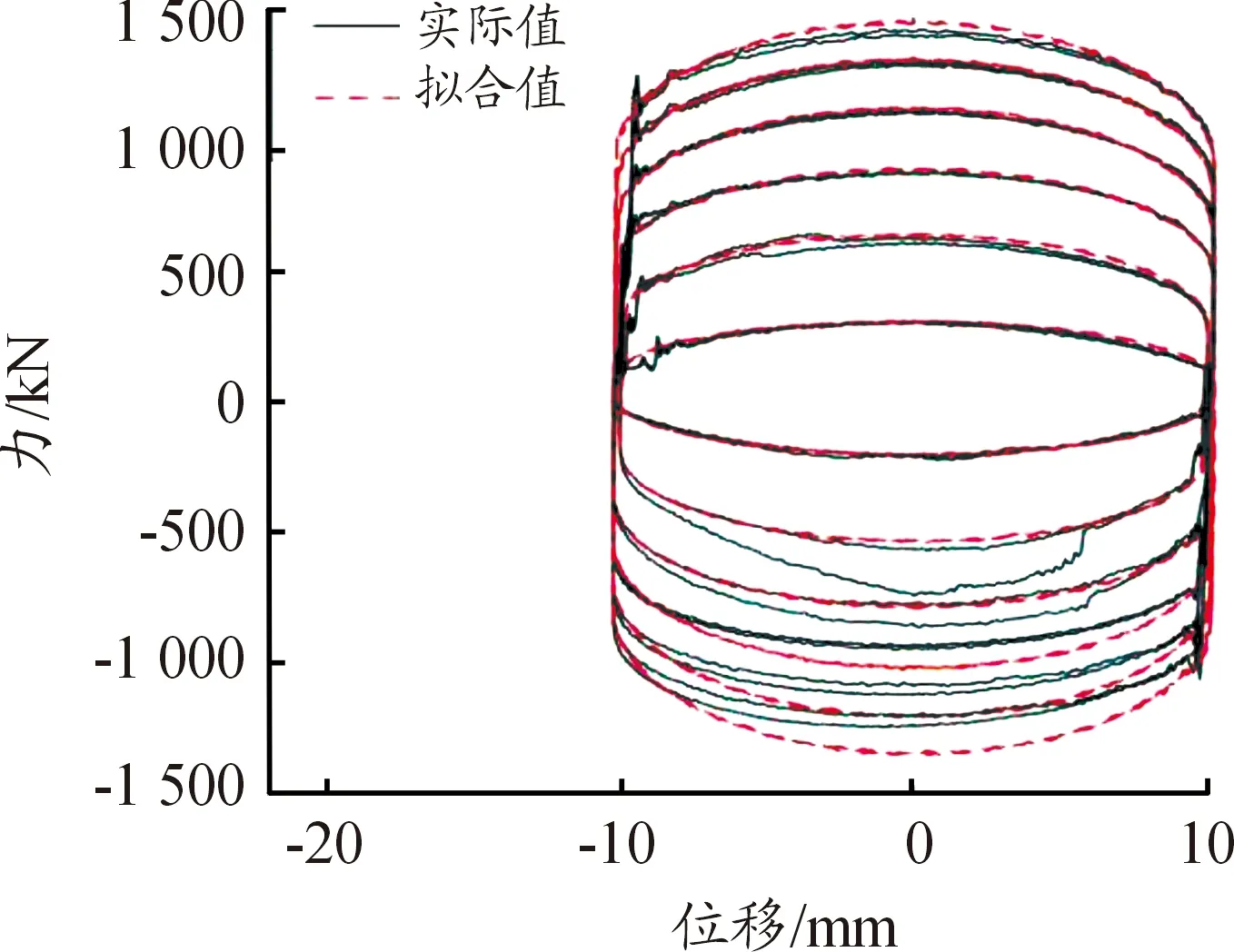
圖4 磁流變阻尼器力-位移擬合數(shù)據(jù)曲線與實(shí)驗(yàn)數(shù)據(jù)曲線
2 座椅懸架系統(tǒng)分析
2.1 座椅懸架模型
裝甲車輛行駛時(shí),路面激勵(lì)經(jīng)過(guò)履帶輪、車體最終傳遞給座椅和人體,假設(shè)車體是前一個(gè)振動(dòng)環(huán)節(jié),“座椅—人體”系統(tǒng)是后一個(gè)振動(dòng)環(huán)節(jié),這里“座椅—人體”系統(tǒng)的質(zhì)量遠(yuǎn)小于裝甲車輛車體的質(zhì)量,汽車?yán)碚撜J(rèn)為這兩個(gè)環(huán)節(jié)之間沒(méi)有反饋,車身底板的垂直振動(dòng)就是“座椅—人體”系統(tǒng)的輸入。利用發(fā)射動(dòng)力學(xué)研究所開(kāi)發(fā)的坦克動(dòng)態(tài)系統(tǒng)仿真軟件MSTMMSim(如圖5所示)得到了C級(jí)路面激勵(lì)下,車速10 m/s時(shí)某型裝甲車車體的位移響應(yīng),如圖6所示,以此作為座椅的激勵(lì)。

圖5 MSTMMSim軟件坦克車輛動(dòng)力學(xué)計(jì)算結(jié)果動(dòng)畫截圖
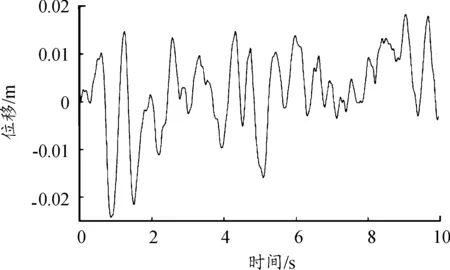
圖6 C級(jí)路面下車身響應(yīng)曲線
某型號(hào)座椅懸架總成如圖7(a)所示,把人體簡(jiǎn)化為一個(gè)剛性質(zhì)量m3,它與空氣彈簧k和磁流變阻尼器Fd構(gòu)成了如圖7(b)所示的一自由度非線性系統(tǒng)。
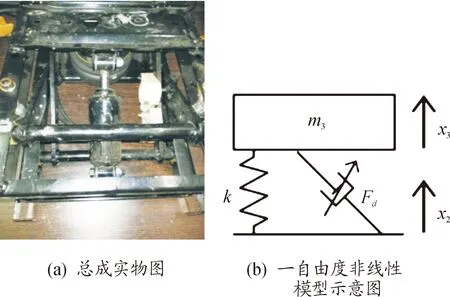
圖7 座椅懸架
該模型運(yùn)動(dòng)方程如下:
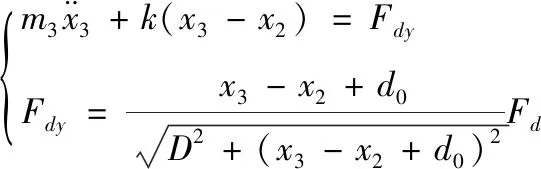
(3)
式中:m3為座椅懸架簧載質(zhì)量,為80 kg;k為座椅懸架等效剛度,其值如式(4)所示;x3為座椅懸架上底板位移;x2為座椅懸架下底板位移;Fdy為磁流變阻尼器等效阻尼力;Fd為磁流變阻尼器阻尼力;D為阻尼器安裝端點(diǎn)橫向距離,為0.16 m;d0為座椅懸架上底板與下底板之間初始距離,為0.095 m。
當(dāng)負(fù)載為80 kg時(shí),對(duì)座椅懸架等效剛度和座椅上底板高度關(guān)系曲線進(jìn)行擬合得到
k=1.534×108h3-2.967×107h2+
2.121×106h-4.237×104
(4)
2.2 座椅懸架振動(dòng)特性
為了了解座椅懸架參數(shù)對(duì)座椅減振性能的影響,這里通過(guò)分析求解得到的“座椅—人體”加速度對(duì)激勵(lì)x2的幅頻特性曲線。
由式(3)可知座椅系統(tǒng)的幅頻特性為
(5)

“座椅—人體”加速度對(duì)激勵(lì)的幅頻特性為
(6)
根據(jù)式(6)得到了圖8所示的剛度和阻尼對(duì)幅頻特性的影響曲線,當(dāng)阻尼不變時(shí),座椅的加速度幅頻特性曲線如圖8(a)所示,從圖8(a)中可以看出同一激勵(lì)頻率下,隨著剛度k的減小,加速度與位移激勵(lì)的比值在減小,即加速度響應(yīng)在減小,適當(dāng)降低剛度可以提高座椅減振性能;當(dāng)剛度不變時(shí),座椅的加速度幅頻特性曲線如圖8(b)所示,從圖中可以看出隨著阻尼c的增大,加速度與位移激勵(lì)比值的峰值急劇減小,增大阻尼可以有效減小共振,在低頻時(shí)增大阻尼,高頻時(shí)減小阻尼可以提高座椅減振性能。
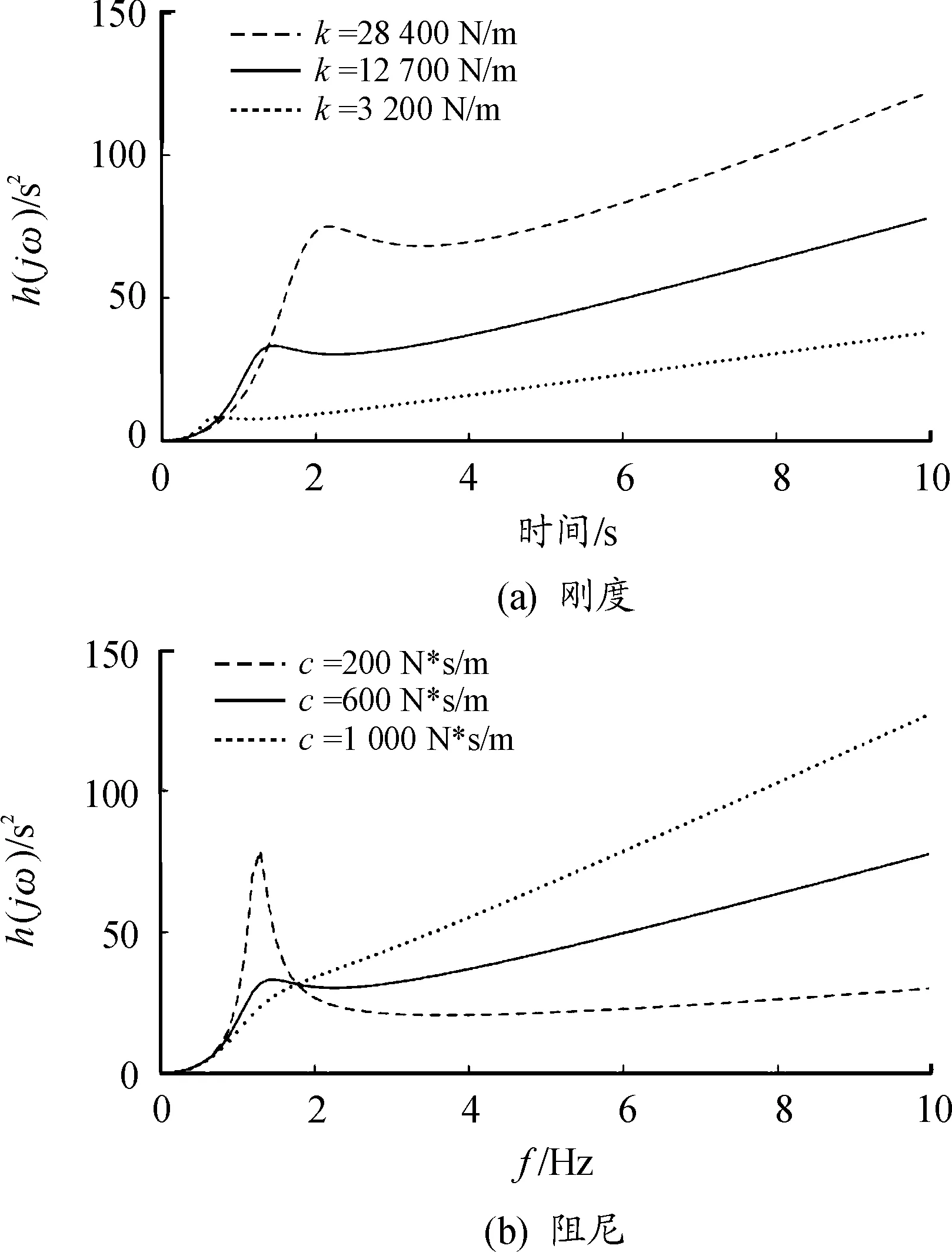
圖8 剛度和阻尼對(duì)幅頻特性的影響曲線
3 模糊控制及仿真
本文采用模糊控制算法來(lái)對(duì)座椅懸架進(jìn)行控制,通過(guò)空氣彈簧實(shí)現(xiàn)剛度調(diào)節(jié),通過(guò)磁流變阻尼器實(shí)現(xiàn)阻尼調(diào)節(jié),座椅懸架控制系統(tǒng)如圖9所示。

圖9 半主動(dòng)座椅控制系統(tǒng)框圖
模糊控制器1的輸入信號(hào)為座椅懸架上底板的速度和座椅懸架上下底板的相對(duì)速度。速度和相對(duì)速度的模糊論域?yàn)閇-6,6],量化因子kv=20,kvr=24,語(yǔ)言變量為“負(fù)大(NB),負(fù)中(NM),負(fù)小(NS),零(ZO),正小(PS),正中(PM),正大(PB)”。選取磁流變阻尼器的控制電流為模糊控制器的輸出,輸出的范圍為[0,1],定義5個(gè)語(yǔ)言變量,為{S,MS,M,MB,B},分別表示電流的小、中小、中、中大和大,輸入輸出變量均采用三角形隸屬度函數(shù)。
模糊控制器1的控制經(jīng)驗(yàn)如下:① 當(dāng)座椅上底板速度v3和上下底板相對(duì)速度v3-v2同向時(shí),磁流變阻尼器阻尼力應(yīng)該與v3成正比,v3越大,控制電流越大;② 當(dāng)座椅上底板速度v3和上下底板相對(duì)速度v3-v2反向時(shí),磁流變阻尼器阻尼力應(yīng)該為零,此時(shí)控制電流為零。根據(jù)上述經(jīng)驗(yàn)建立的模糊控制規(guī)則如表1。

表1 模糊控制器1模糊規(guī)則
模糊控制器2的輸入信號(hào)為座椅懸架上下底板的相對(duì)位移,模糊論域?yàn)閇-6,6],量化因子為200,語(yǔ)言變量為“負(fù)大(NB),負(fù)中(NM),負(fù)小(NS),零(ZO),正小(PS),正中(PM),正大(PB)”。輸出信號(hào)為座椅懸架的高度,模糊論域?yàn)閇0,1],比例因子為0.1,語(yǔ)言變量為“大(B),中(M),小(S),零(ZO)”,輸入輸出變量均采用三角形隸屬度函數(shù)。
模糊控制器2的控制經(jīng)驗(yàn)如下:當(dāng)座椅懸架上下底板相對(duì)位移較小時(shí),在限位行程內(nèi)盡可能降低座椅高度,即對(duì)空氣彈簧放氣來(lái)減小座椅剛度;當(dāng)座椅懸架上下底板相對(duì)位移較大時(shí),盡可能提高座椅高度使其不撞擊限位塊,即對(duì)空氣彈簧充氣來(lái)增大座椅剛度,座椅懸架等效剛度與座椅高度的關(guān)系如式(4)所示,經(jīng)過(guò)計(jì)算可得到座椅懸架剛度。根據(jù)上述經(jīng)驗(yàn)建立的模糊控制規(guī)則如表2。

表2 模糊控制器2模糊規(guī)則
使用Simulink搭建模糊控制的半主動(dòng)座椅單自由度仿真模型,仿真時(shí)間為10 s,仿真步長(zhǎng)為0.001 s,“人—椅”質(zhì)量為80 kg,仿真結(jié)果如圖10和圖11。
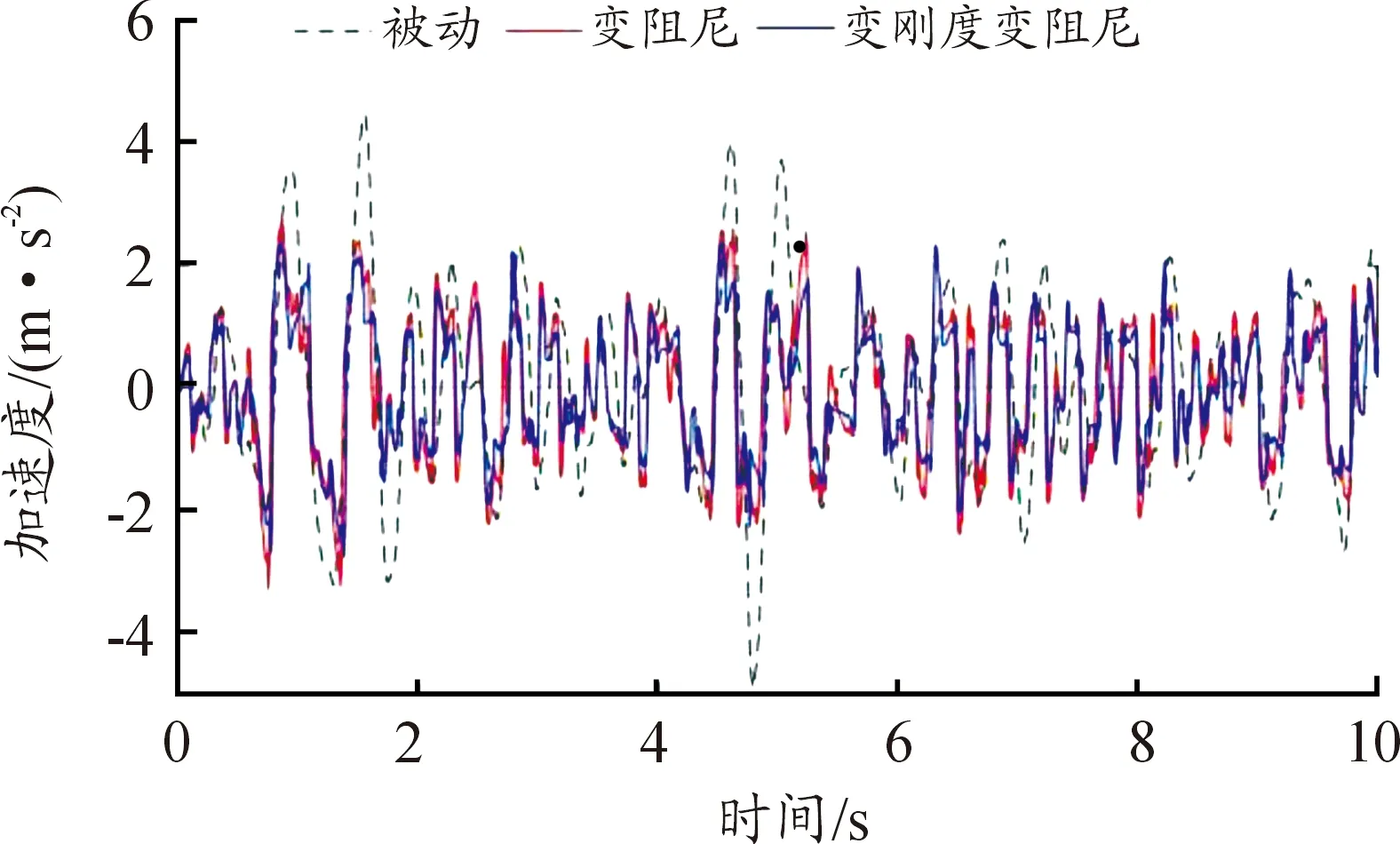
圖10 座椅懸架加速度響應(yīng)曲線
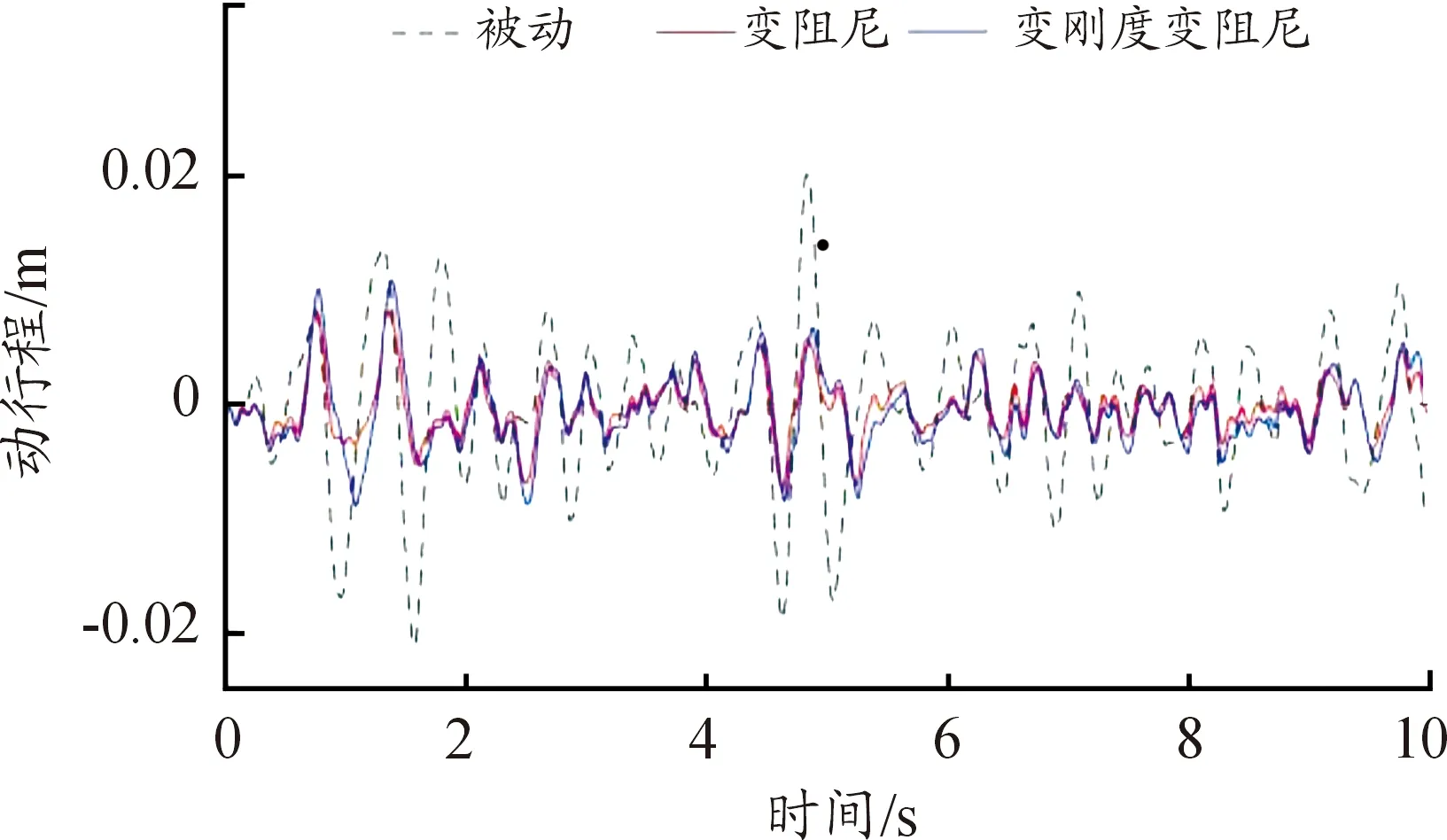
圖11 座椅懸架動(dòng)行程響應(yīng)曲線
圖10所示為座椅懸架模糊控制下加速度響應(yīng)曲線,被動(dòng)座椅懸架加速度均方根為1.739 0 m/s2,模糊控制策略下變阻尼座椅懸架加速度均方根為1.177 9 m/s2,加速度均方根減少了32.27%,模糊控制策略下變剛度變阻尼座椅懸架加速度均方根為1.025 8 m/s2,加速度均方根減少了41.01%,從圖11可知模糊控制策略下變剛度變阻尼座椅懸架動(dòng)行程相比被動(dòng)座椅懸架明顯減小,該變剛度變阻尼座椅懸架比被動(dòng)座椅和單獨(dú)變阻尼控制的座椅擁有更好的減振性能。
4 試驗(yàn)
4.1 試驗(yàn)平臺(tái)整體方案
為了驗(yàn)證半主動(dòng)座椅懸架的減振性能和模糊控制策略的控制效果,設(shè)計(jì)了如圖12所示的半主動(dòng)座椅控制系統(tǒng),基于此系統(tǒng)搭建了如圖13所示的磁流變座椅振動(dòng)控制試驗(yàn)平臺(tái)。
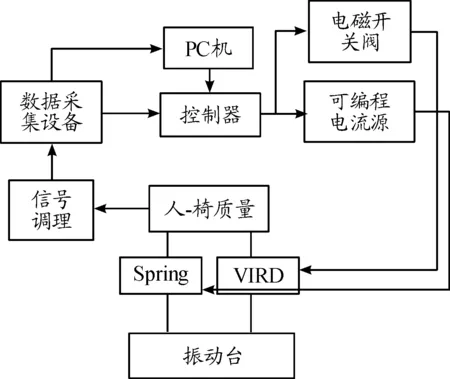
圖12 磁流變座椅懸架控制系統(tǒng)框圖

圖13 磁流變座椅懸架控制系統(tǒng)試驗(yàn)臺(tái)
在振動(dòng)試驗(yàn)控制儀的ShakerController控制軟件里設(shè)定好所需激勵(lì)信號(hào),該系統(tǒng)會(huì)控制一自由度振動(dòng)臺(tái)產(chǎn)生相應(yīng)的振動(dòng)激勵(lì)。在座椅懸架上下底板處各安裝有一個(gè)8711-01-005型量程5g的加速度傳感器,上底板傳感器靈敏度為927.32 mv/g,下底板傳感器靈敏度為928.46 mv/g。在磁流變阻尼器處安裝有一個(gè)位移傳感器,通過(guò)數(shù)據(jù)采集設(shè)備采集座椅的振動(dòng)響應(yīng)信號(hào),信號(hào)經(jīng)過(guò)計(jì)算機(jī)進(jìn)行處理,在speedgoat仿真平臺(tái)下獲得磁流變阻尼器的控制電流,并向電流源輸送電流控制信號(hào),同時(shí)獲得空氣彈簧的充放氣信號(hào),并控制開(kāi)關(guān)電磁閥充放氣。此時(shí)通過(guò)數(shù)據(jù)采集設(shè)備反饋回的座椅上底板加速度響應(yīng)和磁流變阻尼器處位移傳感器信號(hào)來(lái)時(shí)刻修正電流控制信號(hào)和電磁閥充放氣信號(hào)。
4.2 試驗(yàn)結(jié)果與分析
因?yàn)樵撜駝?dòng)臺(tái)無(wú)法產(chǎn)生隨機(jī)激勵(lì)信號(hào),這里通過(guò)正弦激勵(lì)來(lái)驗(yàn)證半主動(dòng)座椅減振效果,座椅懸架固有頻率在 2 Hz 左右。
當(dāng)座椅懸架共振時(shí),被動(dòng)座椅懸架與模糊控制下的座椅懸架加速度響應(yīng)如圖14所示,被動(dòng)座椅懸架加速度均方根為3.572 3 m/s2,僅對(duì)磁流變阻尼器進(jìn)行控制時(shí)座椅上底板加速度均方根值為2.185 7 m/s2,加速度均方根值減少了38.81%,對(duì)空氣彈簧和磁流變阻尼器進(jìn)行聯(lián)合控制時(shí)座椅上底板加速度均方根值為1.945 7 m/s2,加速度均方根值減少了45.53%,該變剛度變阻尼座椅懸架比被動(dòng)座椅懸架和變阻尼座椅懸架擁有更好的隔振性能。
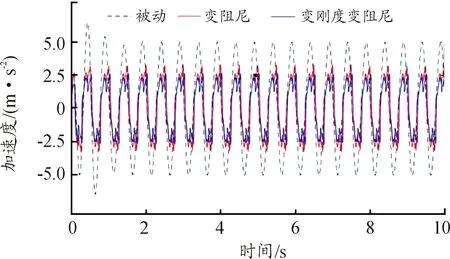
圖14 2 Hz 16 mm正弦激勵(lì)下加速度響應(yīng)曲線
5 結(jié)論
本文制定了基于空氣彈簧和磁流變阻尼器的半主動(dòng)座椅模糊控制策略,并進(jìn)行驗(yàn)證。通過(guò)仿真和試驗(yàn)結(jié)果表明,該控制方法實(shí)現(xiàn)了座椅懸架的剛度和阻尼調(diào)節(jié),相比被動(dòng)座椅和單獨(dú)變阻尼控制的座椅,該半主動(dòng)座椅擁有更好的減振性能。
