基于子空間投影的復(fù)雜水下環(huán)境運(yùn)動(dòng)小目標(biāo)檢測(cè)前跟蹤方法
2021-04-06 02:10:46陳華杰白浩然
電子與信息學(xué)報(bào) 2021年3期
關(guān)鍵詞:檢測(cè)
陳華杰 白浩然
(杭州電子科技大學(xué)通信信息傳輸與融合技術(shù)國(guó)防重點(diǎn)學(xué)科實(shí)驗(yàn)室 杭州 310018)
1 引言
隨著聲吶成像技術(shù)的日益成熟,利用圖像技術(shù)實(shí)現(xiàn)水下蛙人、深水潛艇等水下運(yùn)動(dòng)小目標(biāo)的檢測(cè)與跟蹤對(duì)水域監(jiān)測(cè)等具有重要意義。由于聲吶成像技術(shù)的原理以及水下小目標(biāo)原始像素點(diǎn)數(shù)量少等因素,圖像中呈現(xiàn)的運(yùn)動(dòng)目標(biāo)尺寸小、信號(hào)強(qiáng)度弱;同時(shí)水下噪聲和海底混響等因素導(dǎo)致圖像中存在大量動(dòng)、靜雜波混合的復(fù)雜類型雜波,運(yùn)動(dòng)目標(biāo)的信雜比低[1];更甚者目標(biāo)在數(shù)據(jù)中存在掉幀現(xiàn)象,難以直接追蹤目標(biāo)。運(yùn)動(dòng)小目標(biāo)的原始像素點(diǎn)數(shù)量少,難以利用目標(biāo)面特征,因此利用運(yùn)動(dòng)的規(guī)律性是實(shí)現(xiàn)目標(biāo)追蹤的有效手段。檢測(cè)前跟蹤(Tracking-Before- Detection, TBD)技術(shù)是目前常用的小目標(biāo)跟蹤方法,通過(guò)累積目標(biāo)連續(xù)運(yùn)動(dòng)的信號(hào)確定目標(biāo)航跡[2]。常用TBD技術(shù)包括批處理實(shí)現(xiàn)的動(dòng)態(tài)規(guī)劃(Dynamic Programming, DP)[3,4]和霍夫變換(Hough Transform, HT)[5,6],遞歸實(shí)現(xiàn)的粒子濾波(Particle Filter, PF)[7,8]。
PF技術(shù)通過(guò)尋找狀態(tài)空間傳播的隨機(jī)樣本近似獲取概率密度函數(shù),需要大量樣本以保證檢測(cè)和跟蹤的性能,巨大的計(jì)算量以及大量的有效樣本需求限制了PF技術(shù)在聲吶圖像中的應(yīng)用[9]。HT技術(shù)利用圖像在空間域到參數(shù)空間的轉(zhuǎn)換關(guān)系,將檢測(cè)問(wèn)題轉(zhuǎn)化為統(tǒng)計(jì)問(wèn)題,圖像中任一邊緣點(diǎn)都需要一條對(duì)應(yīng)的曲線表示[10],對(duì)計(jì)算機(jī)的內(nèi)存和算力需求較大。DP技術(shù)采用多階段決策,計(jì)算各階段最優(yōu)決策并根據(jù)各階段間的相關(guān)性獲得整體最優(yōu)決策[11],在復(fù)雜環(huán)境中應(yīng)用DP技術(shù)存在下列問(wèn)題:(1)目標(biāo)在數(shù)據(jù)中存在掉幀現(xiàn)象,DP算法對(duì)此類數(shù)據(jù)的處理效果不佳;(2)數(shù)據(jù)中存在密集分布的動(dòng)雜波且運(yùn)動(dòng)目標(biāo)的信雜比極低[12],DP算法會(huì)產(chǎn)生錯(cuò)誤決策;(3)巨大的計(jì)算量也是DP算法的弊端,大量動(dòng)雜波會(huì)增加狀態(tài)變量數(shù)目,進(jìn)一步提升決策所需計(jì)算量,同時(shí)批處理方式算法的實(shí)時(shí)性有待商榷[13];(4)對(duì)于聲吶、雷達(dá)等高精度傳感器,運(yùn)動(dòng)目標(biāo)在數(shù)據(jù)中可能成為擴(kuò)展目標(biāo)[14],DP算法對(duì)此類目標(biāo)的處理效果不佳[15]。
針對(duì)上述問(wèn)題,本文提出基于子空間投影的TBD算法。首先根據(jù)運(yùn)動(dòng)目標(biāo)的機(jī)動(dòng)性,將目標(biāo)運(yùn)動(dòng)圖像的3維時(shí)空序列切分為若干個(gè)時(shí)間片段[16],保證在單個(gè)時(shí)間片段內(nèi)目標(biāo)的運(yùn)動(dòng)航跡不折疊;然后將3維短時(shí)運(yùn)動(dòng)航跡片段投影到2維子空間平面,根據(jù)目標(biāo)運(yùn)動(dòng)航跡與一般雜波航跡的空間形態(tài)特征差異,篩選獲得局部候選航跡區(qū)域;再對(duì)候選區(qū)域進(jìn)行航跡回溯,將目標(biāo)航跡重映射到3維時(shí)空,根據(jù)目標(biāo)運(yùn)動(dòng)的連續(xù)性、方向一致性等規(guī)律對(duì)目標(biāo)運(yùn)動(dòng)航跡篩選并估計(jì)運(yùn)動(dòng)目標(biāo)中心位置。
將航跡片段從3維時(shí)空投影到2維子空間平面再進(jìn)行處理的優(yōu)勢(shì):待處理的數(shù)據(jù)得以降維,處理速度大幅度提高;不足之處:投影過(guò)程僅保留了空間形態(tài)特征,丟失了數(shù)據(jù)的時(shí)序信息。考慮到在單個(gè)時(shí)間片段內(nèi)目標(biāo)運(yùn)動(dòng)方向改變幅度不大,利用空間形態(tài)特征即可有效區(qū)分運(yùn)動(dòng)目標(biāo)與大部分動(dòng)雜波。在2維子空間平面,依據(jù)總體形態(tài)特征檢測(cè)目標(biāo)航跡,可能存在的部分漏檢航跡點(diǎn)對(duì)檢測(cè)的總體影響較小;檢測(cè)算法對(duì)目標(biāo)尺寸不敏感,對(duì)點(diǎn)目標(biāo)和擴(kuò)展目標(biāo)均適用;各航跡片段單獨(dú)處理,避免了新目標(biāo)起始航跡被誤判為雜波的問(wèn)題[17]。
2 基于子空間投影TBD的運(yùn)動(dòng)目標(biāo)快速檢測(cè)
2.1 總體方案設(shè)計(jì)
面向聲吶水下運(yùn)動(dòng)目標(biāo)檢測(cè)場(chǎng)合,本文構(gòu)建了運(yùn)動(dòng)目標(biāo)快速檢測(cè)系統(tǒng)。在圖1所示的系統(tǒng)方案中,主要的處理環(huán)節(jié)包括:對(duì)輸入的運(yùn)動(dòng)目標(biāo)圖像序列進(jìn)行前景檢測(cè),初步獲取包含運(yùn)動(dòng)點(diǎn)跡和雜波的運(yùn)動(dòng)點(diǎn)集合;截取目標(biāo)/雜波點(diǎn)序列片段,進(jìn)行基于子空間投影的TBD處理,剔除部分雜波干擾點(diǎn),獲取運(yùn)動(dòng)目標(biāo)的短時(shí)航跡點(diǎn)集;將不同時(shí)刻的短時(shí)航跡點(diǎn)集合歸并為長(zhǎng)時(shí)航跡點(diǎn)集合,利用航跡的數(shù)據(jù)特征進(jìn)行聚類[18],將同一目標(biāo)不同時(shí)刻的短時(shí)航跡連接成完整的長(zhǎng)時(shí)航跡,并根據(jù)目標(biāo)運(yùn)動(dòng)的時(shí)空特性進(jìn)一步篩選雜波干擾點(diǎn),剔除長(zhǎng)時(shí)航跡點(diǎn)集合中的無(wú)效運(yùn)動(dòng)點(diǎn)跡。
2.2 前景檢測(cè)
前景檢測(cè)用于輸入圖像數(shù)據(jù)序列的運(yùn)動(dòng)點(diǎn)初檢測(cè)。綜合考慮檢測(cè)速度與檢測(cè)精度,采用幀差法進(jìn)行前景檢測(cè)。計(jì)算當(dāng)前幀與前一幀對(duì)應(yīng)像素點(diǎn)的差值,若差的絕對(duì)值超過(guò)設(shè)定閾值則標(biāo)記該像素點(diǎn)為前景,某幀數(shù)據(jù)及其前景檢測(cè)結(jié)果如圖2所示。
2.3 短時(shí)航跡檢測(cè):基于子空間投影的快速TBD算法
運(yùn)動(dòng)檢測(cè)是對(duì)探測(cè)數(shù)據(jù)按時(shí)間序列處理,濾除雜波干擾,獲取目標(biāo)運(yùn)動(dòng)航跡的過(guò)程。TBD的常規(guī)做法是截取序列片段進(jìn)行積累,序列片段的幀數(shù)選擇與累積時(shí)間、信號(hào)積累效果呈正相關(guān),但若僅追求信號(hào)積累效果則會(huì)相應(yīng)地增加計(jì)算負(fù)擔(dān)。
子空間投影TBD流程如圖3所示:首先將截取的序列片段投影到子空間;在2維空間的短時(shí)投影圖上,利用目標(biāo)航跡與一般雜波的形態(tài)差異進(jìn)行濾波,獲取運(yùn)動(dòng)目標(biāo)可能存在的區(qū)域;再以局部區(qū)域?yàn)槟0寤厮?維序列,并根據(jù)目標(biāo)運(yùn)動(dòng)的連續(xù)性與方向一致性等特性濾除雜波干擾,獲取目標(biāo)短時(shí)候選航跡。

圖1 基于子空間投影的快速TBD檢測(cè)系統(tǒng)方案
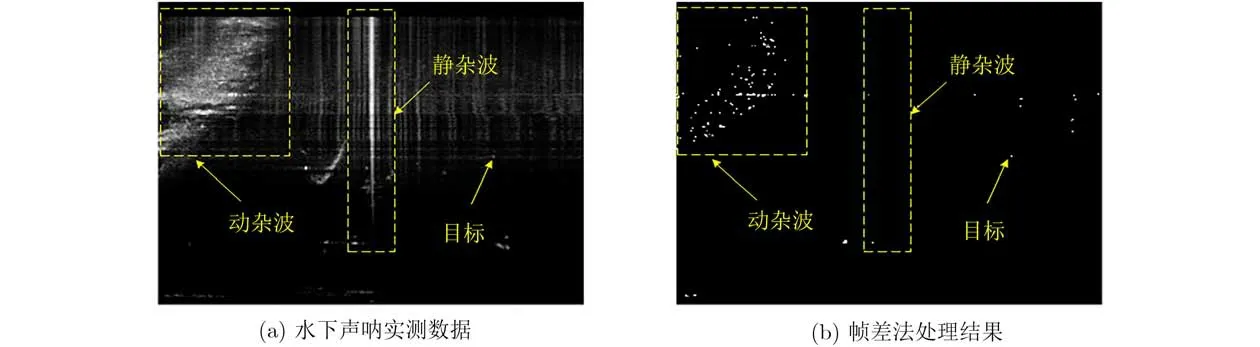
圖2 前景檢測(cè)數(shù)據(jù)及其結(jié)果
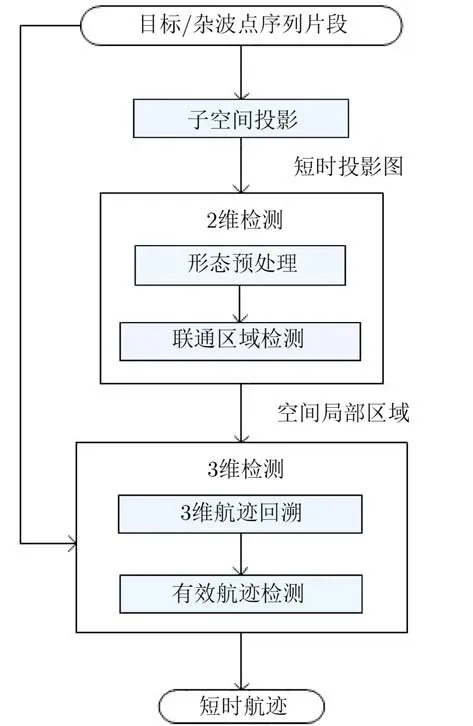
圖3 子空間投影TBD流程圖
2.3.1 子空間投影
待處理的數(shù)據(jù)序列片段表示為 f(x,y,t), t=t1,t2,···,tk,片段中存在k 幀數(shù)據(jù),其中( x,y)是2維空間平面坐標(biāo), t是采樣時(shí)刻。f (xn,yn,tn)對(duì)應(yīng)3維時(shí)空的一個(gè)點(diǎn),其坐標(biāo)為 (xn,yn,tn),該點(diǎn)的取值范 圍 為 {0,1} 。若 位 置( xn,yn,tn)上 存 在 點(diǎn) 跡,則f(xn,yn,tn)=1 ;若該位置上沒(méi)有點(diǎn)跡,則f(xn,yn,tn)=0。
將該序列片段向2維子空間平面( x,y)投影,獲得短時(shí)投影圖p(x,y)
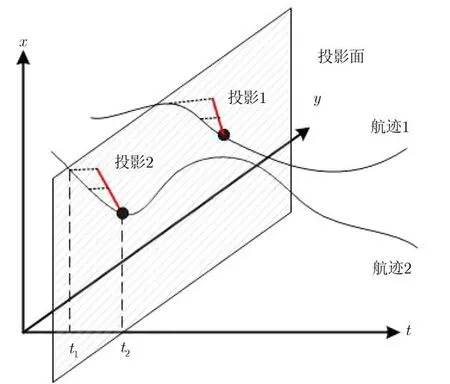
圖4 子空間投影示意圖
圖4給出了運(yùn)動(dòng)目標(biāo)航跡的子空間投影示意圖,其中的目標(biāo)運(yùn)動(dòng)航跡由3維時(shí)空曲線映射到投影面上的2維空間曲線。降維后目標(biāo)航跡丟失了3維時(shí)序信息,但基本保留了完整的空間運(yùn)行形態(tài)信息。
一般情況下目標(biāo)在序列片段內(nèi)做單向運(yùn)動(dòng),2維投影圖中航跡呈長(zhǎng)條狀,寬度由目標(biāo)的尺寸決定,長(zhǎng)度由目標(biāo)運(yùn)動(dòng)速度決定,形態(tài)由目標(biāo)實(shí)際航跡決定。為了盡量保留目標(biāo)航跡的空間形態(tài)特征,需要根據(jù)目標(biāo)的運(yùn)動(dòng)速度選擇合理的數(shù)據(jù)序列長(zhǎng)度。序列片段長(zhǎng)度越大,目標(biāo)運(yùn)動(dòng)航跡在投影結(jié)果中存在折疊的可能性越大;序列長(zhǎng)度不足會(huì)削弱累積效應(yīng),降低雜波濾除的效果。
2.3.2 2維空間形態(tài)檢測(cè)
2維檢測(cè)是在投影圖上根據(jù)目標(biāo)航跡投影與雜波投影的形態(tài)差異,盡量濾除干擾雜波,確定目標(biāo)航跡所處的局部區(qū)域。如前所述,一般情況下目標(biāo)航跡投影呈現(xiàn)長(zhǎng)條狀,大概率與雜波干擾點(diǎn)投影呈現(xiàn)明顯差異:散亂雜波一般為散亂分布的點(diǎn)狀;一定范圍內(nèi)聚集的雜波點(diǎn)的投影聚集形成的區(qū)域,與規(guī)律的條狀也有明顯的區(qū)分。根據(jù)形態(tài)學(xué)閉操作對(duì)投影圖的預(yù)處理結(jié)果劃分聯(lián)通區(qū)域,由聯(lián)通區(qū)域間形態(tài)特征的差異確定候選投影區(qū)域。
(1) 形態(tài)學(xué)預(yù)處理。受噪聲、雜波等因素的影響,運(yùn)動(dòng)航跡可能出現(xiàn)間斷,投影圖上表現(xiàn)為航跡中存在狹窄的間斷。采用形態(tài)學(xué)閉運(yùn)算可消除航跡中的輕微間斷,對(duì)鄰近干擾信息也有一定的濾波作用。圖5(a)為某一序列片段的子空間投影圖,圖5(b)為投影圖形態(tài)學(xué)預(yù)處理后的結(jié)果。

利用上述約束對(duì)圖5(b)中的聯(lián)通區(qū)域檢測(cè),候選聯(lián)通區(qū)域在圖6(a)用紅色標(biāo)注。
2.3.3 3維時(shí)空航跡回溯及檢測(cè)
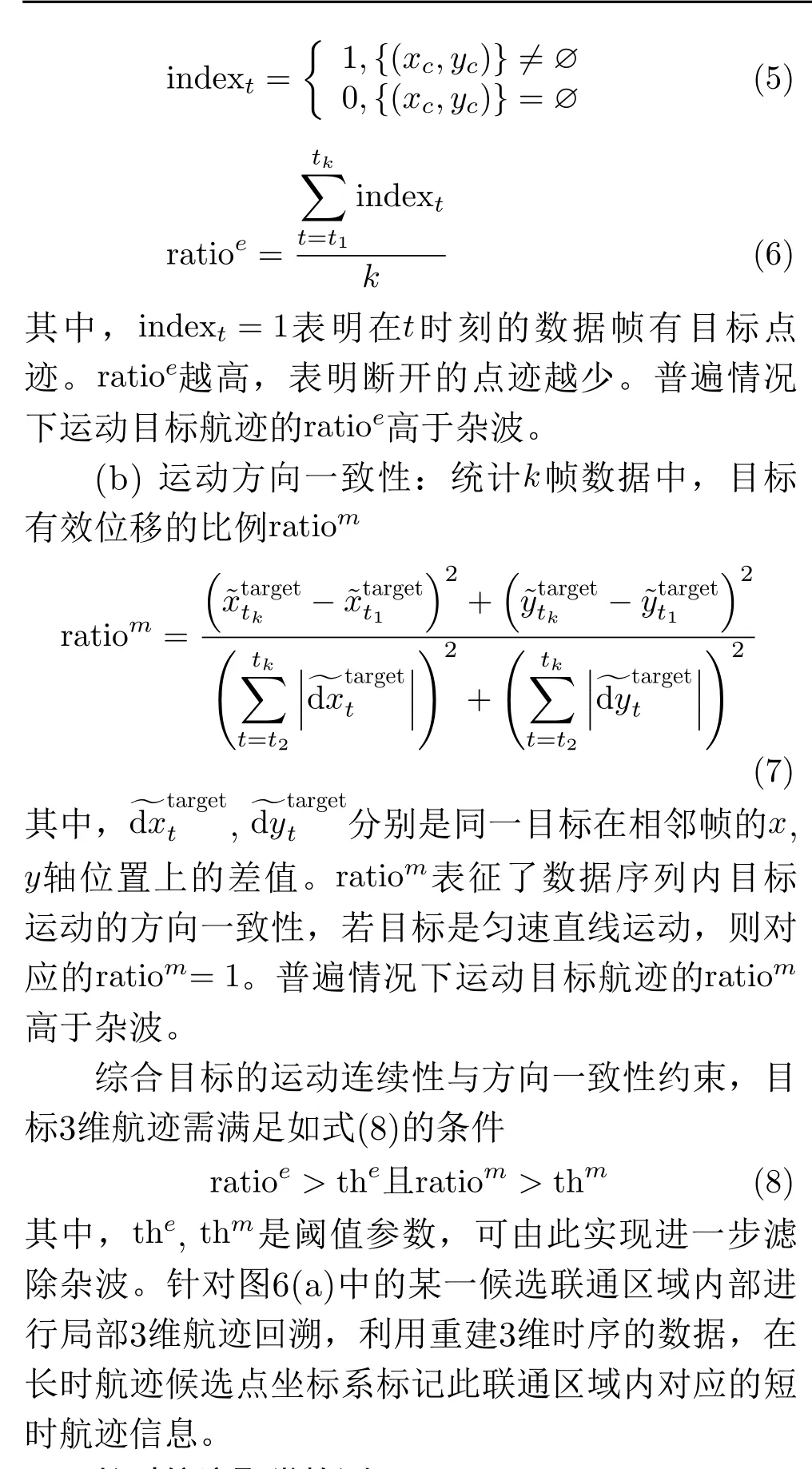
在候選聯(lián)通區(qū)域范圍內(nèi),對(duì)目標(biāo)每個(gè)時(shí)刻的空間位置估計(jì);回溯當(dāng)前序列片段得到的目標(biāo)3維時(shí)空航跡,依次重構(gòu)運(yùn)動(dòng)點(diǎn)跡集合的時(shí)序關(guān)系;結(jié)合時(shí)序關(guān)系,對(duì)航跡的內(nèi)在規(guī)律進(jìn)行更細(xì)致的刻畫(huà),進(jìn)一步濾除雜波。
(1) 航跡回溯。設(shè)2維檢測(cè)后存在 m個(gè)聯(lián)通區(qū)域:{ sa|a=1,2,···,m} , sa是其中的一個(gè)聯(lián)通區(qū)域,該聯(lián)通區(qū)域由 q個(gè)空間位置點(diǎn)構(gòu)成:sa={(xb,yb)|b=1,2,···,q}, ( xb,yb)是 其中的一個(gè)位置點(diǎn)。f(x,y,t)是該序列片段內(nèi)的某一數(shù)據(jù)幀,獲取該數(shù)據(jù)幀中運(yùn)動(dòng)目標(biāo)在聯(lián)通區(qū)域sa內(nèi)的運(yùn)動(dòng)點(diǎn)集合

計(jì)算點(diǎn)跡的位置均值,作為運(yùn)動(dòng)目標(biāo)在該數(shù)據(jù)幀上的位置估計(jì)

運(yùn)動(dòng)點(diǎn)集合{ (xc,yc)}包含目標(biāo)航跡的位置坐標(biāo)及可能存在的雜波點(diǎn)坐標(biāo),因此運(yùn)動(dòng)目標(biāo)的位置估計(jì)可能會(huì)存在偏差。目標(biāo)尺寸越大、雜波密度越低,運(yùn)動(dòng)點(diǎn)跡的有效占比越大,位置估計(jì)越準(zhǔn)確。目標(biāo)的尺寸對(duì)目標(biāo)的位置估計(jì)的影響可忽略不計(jì),因此該算法對(duì)點(diǎn)目標(biāo)、擴(kuò)展目標(biāo)均適用。
(2) 3維短時(shí)航跡檢測(cè)。利用投影的2維空間形態(tài),結(jié)合重構(gòu)的3維時(shí)序關(guān)系,可以在3維時(shí)空提取到更細(xì)致的運(yùn)行特性信息,進(jìn)一步濾除雜波干擾,其中包括

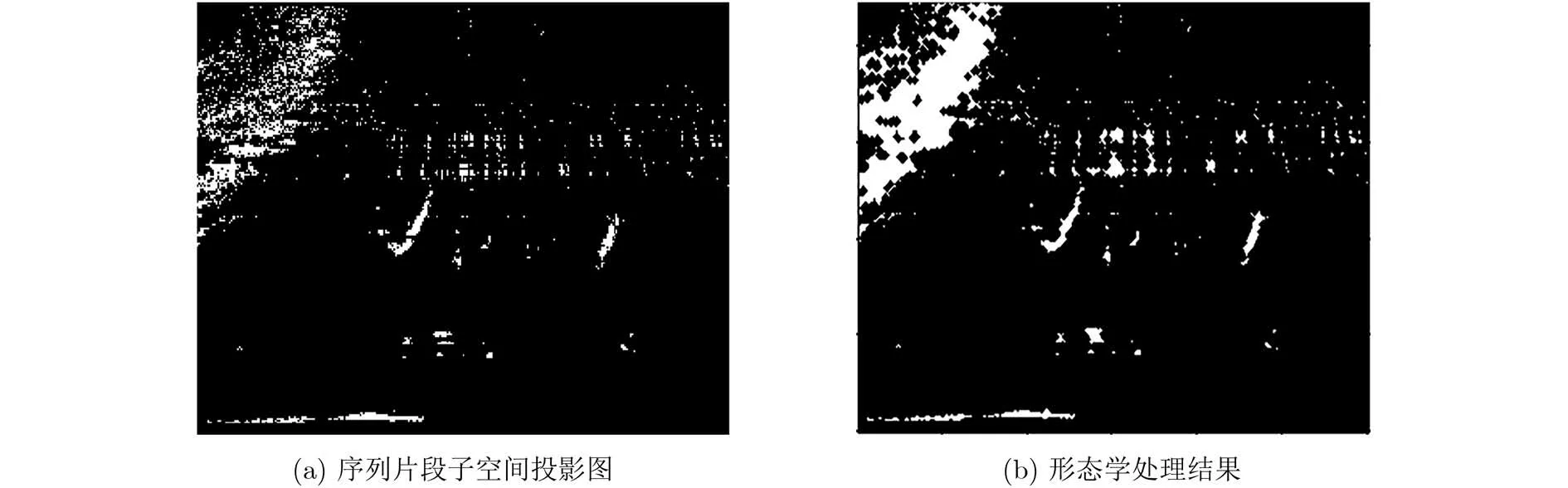
圖5 子空間投影及形態(tài)學(xué)處理
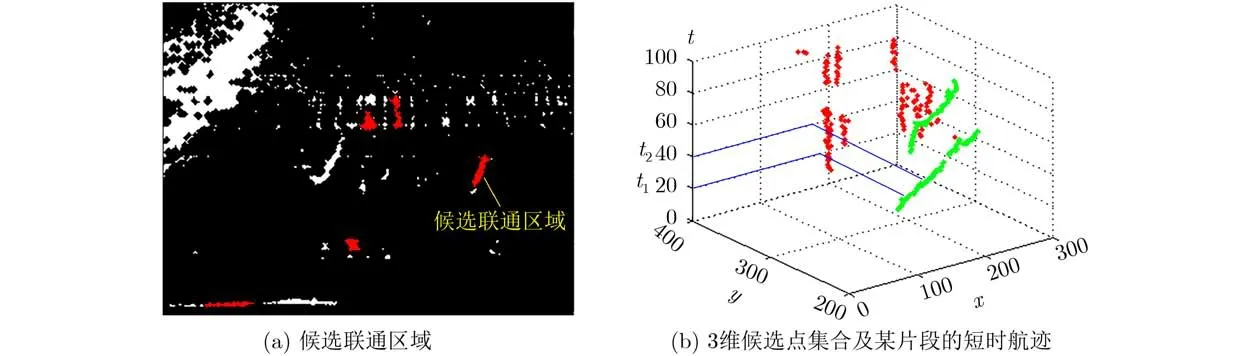
圖6 聯(lián)通區(qū)域檢測(cè)及航跡3維坐標(biāo)顯示
2.4 長(zhǎng)時(shí)航跡聚類檢測(cè)
將各數(shù)據(jù)序列片段處理的短時(shí)航跡歸并為短時(shí)航跡集合,采用HAC對(duì)短時(shí)航跡集合進(jìn)行聚類,再結(jié)合目標(biāo)航跡特性進(jìn)行檢測(cè),判斷并刪除干擾航跡,生成目標(biāo)的長(zhǎng)時(shí)運(yùn)動(dòng)航跡。
2.4.1 航跡聚類
基于HAC的航跡聚類基本思路:將每個(gè)3維運(yùn)動(dòng)點(diǎn)作為初始集合開(kāi)始迭代,每次迭代會(huì)將最相似的2個(gè)運(yùn)動(dòng)點(diǎn)集合合并,直到任意2個(gè)集合之間的距離超過(guò)截?cái)嗑嚯x。聚類過(guò)程中集合間的距離測(cè)度采用單鏈形式,截?cái)嗑嚯x取決于運(yùn)動(dòng)目標(biāo)的速度與相鄰幀的間隔時(shí)間:
2.4.2 目標(biāo)航跡檢測(cè)
對(duì)于HAC生成的各候選航跡,需要根據(jù)運(yùn)動(dòng)目標(biāo)與雜波擾動(dòng)的特征差異進(jìn)一步篩選。與實(shí)際目標(biāo)運(yùn)行相比,雜波擾動(dòng)在時(shí)間維度持續(xù)時(shí)間較短,在空間范圍內(nèi)移動(dòng)距離較短。可根據(jù)下列條件,從候選航跡中檢測(cè)出目標(biāo)的實(shí)際航跡。
(1) 航跡的時(shí)間長(zhǎng)度。重構(gòu)時(shí)序后的3維航跡點(diǎn)跡集合,時(shí)間維度與圖像輸入序列的圖像幀數(shù)一一對(duì)應(yīng),考慮將時(shí)間維度作為約束條件,保證航跡連續(xù)存在時(shí)長(zhǎng),可以有效解決2維投影圖中的航跡疊加問(wèn)題,也可以解決部分航跡交叉問(wèn)題。
采用上述條件對(duì)上述圖6(b)進(jìn)行檢測(cè),得到目標(biāo)的長(zhǎng)時(shí)運(yùn)動(dòng)航跡(圖6中淺色標(biāo)出),經(jīng)對(duì)比與實(shí)際航跡符合。
2.4.3 過(guò)時(shí)點(diǎn)刪除
隨著時(shí)間的推移,每次產(chǎn)生的新增候選點(diǎn)都被納入長(zhǎng)時(shí)航跡候選點(diǎn)集合,新增候選點(diǎn)中存在與原有的候選點(diǎn)有著時(shí)空關(guān)聯(lián)的候選點(diǎn),此類候選點(diǎn)可連接組成連續(xù)航跡。同時(shí)時(shí)間維度約束會(huì)導(dǎo)致部分原有候選點(diǎn)不可能與后續(xù)任何候選點(diǎn)產(chǎn)生關(guān)聯(lián),稱為過(guò)時(shí)點(diǎn)。及時(shí)刪除候選點(diǎn)集合中的過(guò)時(shí)點(diǎn),有助于控制候選點(diǎn)集合的規(guī)模,提高算法的效率。
3 實(shí)驗(yàn)驗(yàn)證及分析
實(shí)驗(yàn)使用計(jì)算機(jī)的處理器為Intel Core i5-9300H,主頻2.4 GHz,內(nèi)存8 GB。實(shí)驗(yàn)數(shù)據(jù)為中國(guó)船舶重工集團(tuán)公司第七二六研究所提供的某型聲吶在不同時(shí)間段的水下實(shí)測(cè)數(shù)據(jù),對(duì)數(shù)據(jù)進(jìn)行人工篩選,選定存在目標(biāo)的兩段數(shù)據(jù)。數(shù)據(jù)中的運(yùn)動(dòng)目標(biāo)為深度18.5 m的重球,數(shù)據(jù)序列1中存在2個(gè)目標(biāo),數(shù)據(jù)序列2中存在1個(gè)目標(biāo)。對(duì)原始數(shù)據(jù)進(jìn)行分貝等級(jí)轉(zhuǎn)化、數(shù)值歸一化、壓縮等處理,得到尺寸為400×300的圖像聲吶數(shù)據(jù),各目標(biāo)在數(shù)據(jù)中的實(shí)際運(yùn)動(dòng)軌跡如圖7(a)、圖7(b)所示。
采用基于DP-TBD的快速檢測(cè)系統(tǒng)對(duì)兩個(gè)數(shù)據(jù)序列進(jìn)行處理,算法檢測(cè)的目標(biāo)及其航跡如圖8(a)、圖8(b)所示。
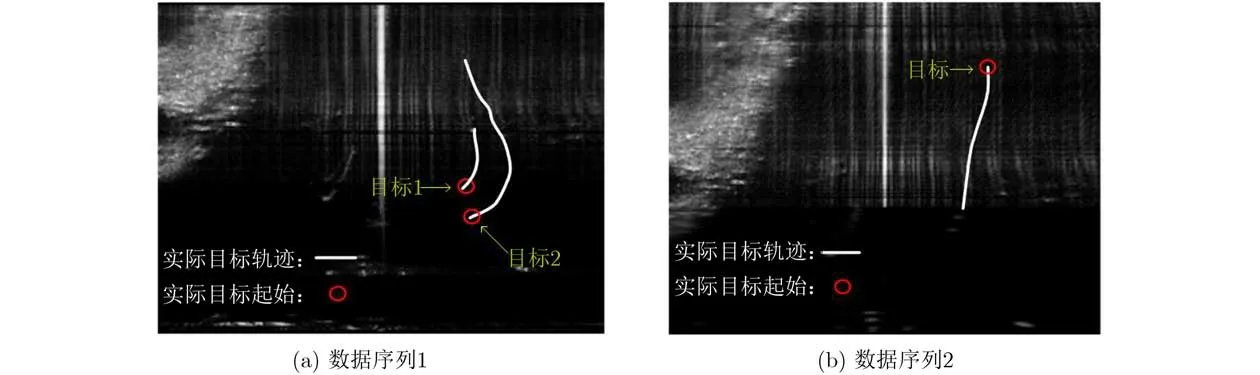
圖7 目標(biāo)原始軌跡
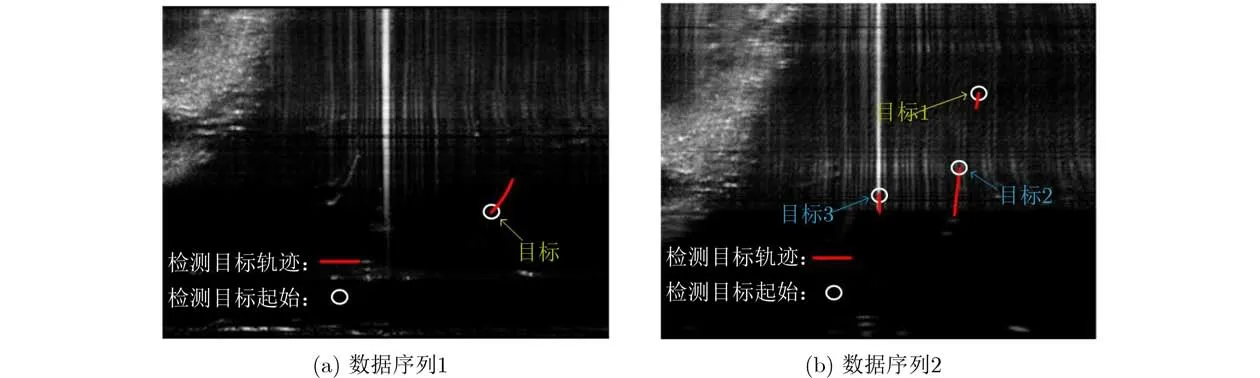
圖8 基于DP-TBD的快速檢測(cè)系統(tǒng)對(duì)數(shù)據(jù)序列的檢測(cè)結(jié)果
基于DP-TBD的快速檢測(cè)系統(tǒng)對(duì)2個(gè)數(shù)據(jù)序列中目標(biāo)的檢測(cè)結(jié)果如表1所示。
對(duì)于數(shù)據(jù)序列1,DP-TBD算法完全沒(méi)有跟蹤到目標(biāo)1,目標(biāo)2的起始位置偏后且跟蹤一段距離后目標(biāo)丟失。對(duì)于數(shù)據(jù)序列2,算法跟蹤目標(biāo)的起始位置偏后,目標(biāo)丟失后重新跟蹤到目標(biāo),檢測(cè)結(jié)果中存在一個(gè)虛警目標(biāo)。
用本文構(gòu)建的基于子空間投影TBD的快速檢測(cè)系統(tǒng)對(duì)兩個(gè)數(shù)據(jù)序列進(jìn)行處理,檢測(cè)系統(tǒng)的具體參數(shù)選擇如下:以連續(xù)的20幀數(shù)據(jù)長(zhǎng)度作為序列片段截取長(zhǎng)度;直徑5像素長(zhǎng)度的圓模板進(jìn)行形態(tài)學(xué)處理;5像素長(zhǎng)度至40像素長(zhǎng)度作為聯(lián)通區(qū)域尺寸范圍;0.5作為運(yùn)動(dòng)連續(xù)性閾值;0.3作為運(yùn)動(dòng)方向一致性閾值;連續(xù)的6幀數(shù)據(jù)長(zhǎng)度作為聚類的時(shí)間閾值;10像素長(zhǎng)度作為目標(biāo)運(yùn)動(dòng)的長(zhǎng)度閾值;20像素長(zhǎng)度作為目標(biāo)的實(shí)際位移閾值。算法檢測(cè)的目標(biāo)及其航跡如圖9(a)、圖9(b)所示。
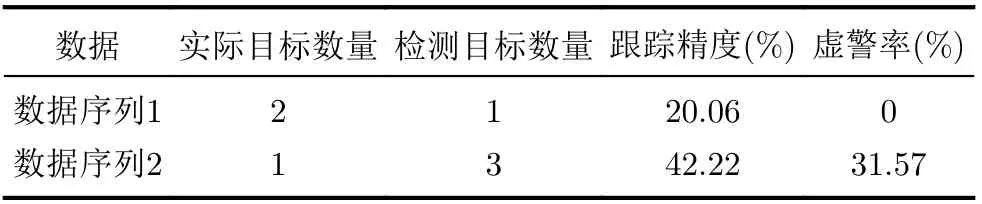
表1 基于DP-TBD的檢測(cè)結(jié)果
基于子空間投影TBD算法對(duì)兩個(gè)數(shù)據(jù)序列中目標(biāo)的檢測(cè)結(jié)果如表2所示。
對(duì)于數(shù)據(jù)序列1,本文算法跟蹤了目標(biāo)1的完整運(yùn)動(dòng)軌跡,目標(biāo)2的起始位置和實(shí)際軌跡相同,檢測(cè)結(jié)果中目標(biāo)航跡中斷了兩次,但可以及時(shí)重新跟蹤目標(biāo)。對(duì)于數(shù)據(jù)序列2,目標(biāo)航跡中斷1次并被重新跟蹤到目標(biāo)。
上述實(shí)驗(yàn)結(jié)果表明,本文算法相比于經(jīng)典的DP-TBD算法,無(wú)論對(duì)于單目標(biāo)還是多目標(biāo),基本解決了目標(biāo)航跡起始緩慢的問(wèn)題。同時(shí)對(duì)于復(fù)雜環(huán)境下的運(yùn)動(dòng)目標(biāo),在目標(biāo)跟蹤精度上也有了極大提升,并改善了虛警問(wèn)題。但對(duì)于目標(biāo)航跡中斷后的關(guān)聯(lián)問(wèn)題,沒(méi)有很好的解決方案。
統(tǒng)計(jì)基于兩種算法構(gòu)建的檢測(cè)系統(tǒng)處理實(shí)測(cè)聲吶圖像的總用時(shí),經(jīng)過(guò)多次實(shí)驗(yàn)利用總用時(shí)的平均值計(jì)算單幀數(shù)據(jù)處理的平均用時(shí),如表3所示。
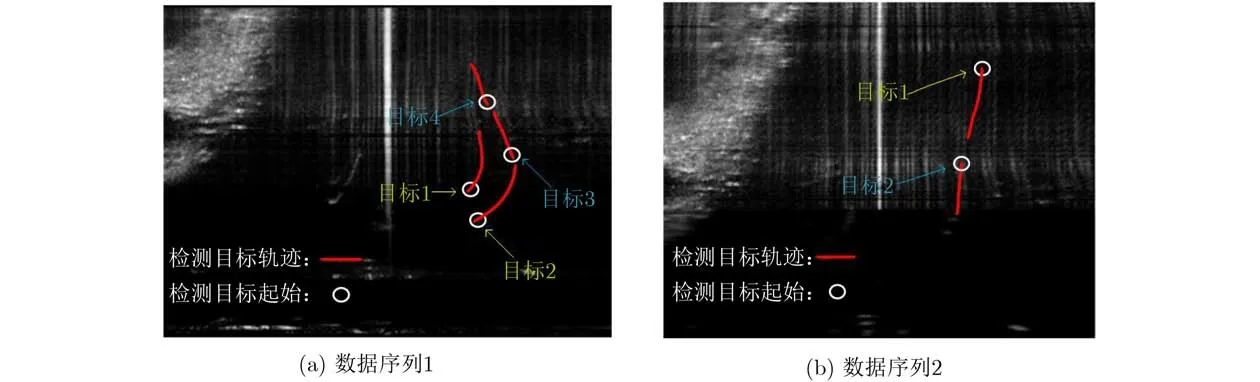
圖9 基于子空間投影TBD的快速檢測(cè)系統(tǒng)對(duì)數(shù)據(jù)序列的檢測(cè)結(jié)果
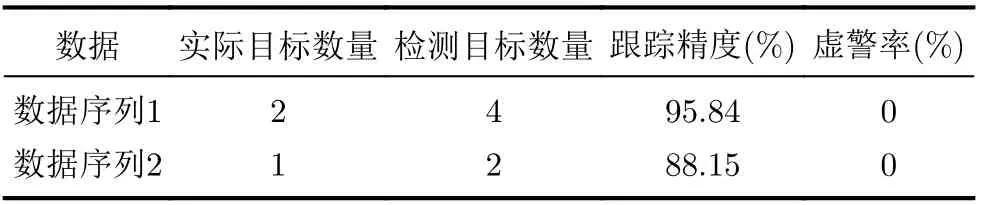
表2 基于子空間投影TBD的檢測(cè)結(jié)果
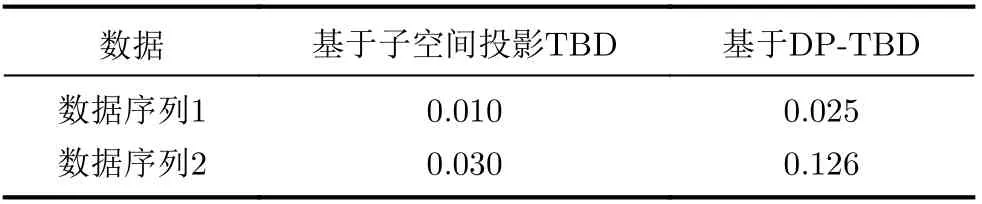
表3 處理單幀數(shù)據(jù)的平均用時(shí)(幀/s)
由于數(shù)據(jù)序列2中干擾信息數(shù)量大于數(shù)據(jù)序列1,表3中兩種算法對(duì)于數(shù)據(jù)序列2處理的幀平均用時(shí)均大于數(shù)據(jù)序列1的幀平均用時(shí)。經(jīng)典DP-TBD算法相比本文算法對(duì)實(shí)驗(yàn)數(shù)據(jù)的幀處理平均用時(shí)差距較大,主要原因在于DP算法需要對(duì)每幀數(shù)據(jù)處理,分階段得到候選位置信息并做出決策,干擾信息數(shù)量越多其決策時(shí)間越長(zhǎng),且會(huì)在多次的決策階段持續(xù)產(chǎn)生影響。本文算法通過(guò)對(duì)數(shù)據(jù)序列片段疊加,每個(gè)數(shù)據(jù)片段進(jìn)行一次軌跡檢測(cè),大幅降低了算法用時(shí),提升算法實(shí)時(shí)性的同時(shí)降低了航跡中斷后重新跟蹤目標(biāo)的難度。
4 結(jié)論
本文針對(duì)復(fù)雜水下環(huán)境的弱小運(yùn)動(dòng)目標(biāo)跟蹤,提出了基于子空間投影的TBD算法。該算法利用目標(biāo)運(yùn)動(dòng)航跡從3維時(shí)空投影到2維平面,最后回溯到3維時(shí)空的整體過(guò)程,依據(jù)目標(biāo)運(yùn)動(dòng)的一般特性,濾除大部分干擾信息,采用層次聚類獲取完整航跡。本方法充分利用了目標(biāo)的數(shù)據(jù)幀內(nèi)位置信息、目標(biāo)運(yùn)動(dòng)的幀間連續(xù)性信息、目標(biāo)運(yùn)動(dòng)的有效數(shù)據(jù)幀占比和目標(biāo)連續(xù)運(yùn)動(dòng)的有效位移。比之現(xiàn)有方法,提高了目標(biāo)航跡起始能力,實(shí)現(xiàn)了更高的實(shí)時(shí)跟蹤精度,減少了算法所需計(jì)算量。同時(shí)該算法對(duì)運(yùn)動(dòng)目標(biāo)的類型要求寬泛,可同時(shí)對(duì)尺寸、機(jī)動(dòng)性差異較大的多目標(biāo)實(shí)現(xiàn)高精度的實(shí)時(shí)檢測(cè)。
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48