基于DOA-TDOA-FDOA的單站無源相干定位代數(shù)解
2021-04-06 02:10:36黃東華趙勇勝趙擁軍儲美娟
電子與信息學(xué)報(bào) 2021年3期
黃東華 趙勇勝 趙擁軍 儲美娟
(中國人民解放軍戰(zhàn)略支援部隊(duì)信息工程大學(xué) 鄭州 450001)
1 引言
基于外輻射源的無源定位方法又稱無源相干定位(Passive Coherent Location, PCL)技術(shù),其特點(diǎn)在于自身不輻射電磁波,而是利用環(huán)境中已有的第三方輻射源(如調(diào)頻廣播信號[1]、數(shù)字電視信號[2]、雷達(dá)輻射源信號[3]、WiFi信號[4]、衛(wèi)星信號[5,6]等)來探測和定位目標(biāo)。這一特殊的工作原理,使其相比于有源雷達(dá)系統(tǒng)具有體積小、成本低、隱蔽性高、不占用頻譜資源等優(yōu)點(diǎn)[7]。相比于多站系統(tǒng),單站系統(tǒng)不存在時(shí)間和數(shù)據(jù)同步的問題,機(jī)動性好。因此,研究高精度的單站外輻射源定位方法具有重要的意義。
無源相干定位系統(tǒng)的明顯特征是其觀測站上配置了兩條接收通道,其中一條為參考通道,用于接收來自外輻射源的直達(dá)波信號,另一條為監(jiān)視通道,用于接收潛在的目標(biāo)回波信號[8]。對于無源相干定位問題,有直接定位和兩步定位兩種思路。直接定位利用目標(biāo)回波信號的時(shí)頻特性等從接收信號中直接估計(jì)出目標(biāo)位置參數(shù),避免了定位參數(shù)提取引入的誤差,但是直接定位方法計(jì)算量過大的缺點(diǎn)限制了其在實(shí)際中的應(yīng)用。兩步定位首先從接收信號中提取出目標(biāo)回波信號到達(dá)接收站的角度(Direction Of Arrival, DOA)、時(shí)差(Time Difference Of Arrival, TDOA)、頻差(Frequency Difference Of Arrival, FDOA)等定位參數(shù)[9–11],然后通過設(shè)計(jì)合理的定位算法,從DOA, TDOA和FDOA等定位參數(shù)中估計(jì)出目標(biāo)的位置和速度等信息。然而,由于DOA, TDOA和FDOA觀測方程與目標(biāo)位置參數(shù)之間存在高度非線性的函數(shù)關(guān)系,因此,基于DOA,TDOA和FDOA的單站無源相干定位問題并不容易。
目前,學(xué)術(shù)界對于單站無源相干定位問題的研究主要可以分為基于TDOA的定位[12–17]、基于D O A 和T D O A 的 定 位[18–21]、基 于T D O A 和FDOA的定位[22–24]。基于TDOA的定位方法對時(shí)差觀測精度要求較高,在時(shí)差估計(jì)精度較低時(shí),算法的定位精度不甚理想。相比于基于TDOA的定位方法,基于DOA和TDOA的定位方法由于使用了額外的角度觀測量,因此目標(biāo)位置的估計(jì)精度也更高,但是缺點(diǎn)在于無法估計(jì)出目標(biāo)速度信息。基于TDOA和FDOA的定位算法通過聯(lián)合FDOA信息,可以同時(shí)估計(jì)出目標(biāo)的位置和速度信息,但是對于目標(biāo)位置的估計(jì)精度要低于基于DOA和TDOA的定位方法。相比于上述3種定位方式,聯(lián)合DOA,TDOA和FDOA的定位方式理論上可以同時(shí)估計(jì)出目標(biāo)的位置和速度信息,并且具有更高的估計(jì)精度。然而,目前對于聯(lián)合DOA, TDOA和FDOA的無源相干定位問題,還缺少相應(yīng)的定位算法。
為此,本文針對利用單個(gè)觀測站接收多個(gè)外輻射源信號實(shí)現(xiàn)目標(biāo)定位的問題,聯(lián)合DOA, TDOA和FDOA觀測,對目標(biāo)位置和速度進(jìn)行估計(jì)。將經(jīng)典的兩步加權(quán)最小二乘思想[25–27]應(yīng)用到本文定位模型中,提出了一種適用于基于DOA, TDOA和FDOA觀測的單站無源相干定位問題的代數(shù)解算法。推導(dǎo)了基于DOA, TDOA和FDOA觀測的單站無源相干定位的CRLB。最后通過仿真實(shí)驗(yàn)驗(yàn)證了算法的有效性。
2 定位場景

聯(lián)合式(3)和式(4)中的角度觀測,式(9)中的時(shí)差觀測,以及式(10)中的頻差觀測,得到系統(tǒng)整體的觀測方程為

3 定位算法
本節(jié)推導(dǎo)角度、時(shí)差和頻差觀測的目標(biāo)定位問題代數(shù)解,算法遵循經(jīng)典的兩步加權(quán)最小二乘框架。
3.1 第1步加權(quán)最小二乘估計(jì)
首先,利用三角函數(shù)和1階泰勒級數(shù)展開,將式(3)和式(4)中方位角和俯仰角的觀測方程轉(zhuǎn)化為如式(12)和式(13)線性形式

將式(14)關(guān)于時(shí)間求導(dǎo),從而得到目標(biāo)位置參數(shù)與頻差觀測量之間的偽線性方程為
誤差向量矩陣? h1可以表示為
3.2 第2步加權(quán)最小二乘估計(jì)


4 CRLB及理論性能分析
4.1 CRLB分析
其中, κ為常數(shù)。根據(jù)式(35)中的概率密度函數(shù),可得Fisher信息矩陣(Fisher Information Matrix,FIM)為
其中,偏導(dǎo)矩陣的具體表達(dá)式為
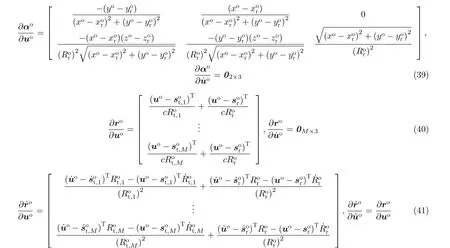
4.2 理論誤差分析
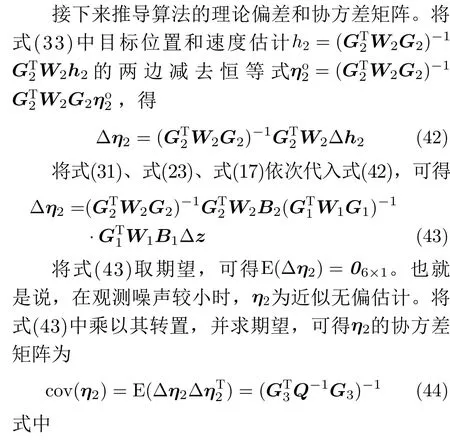
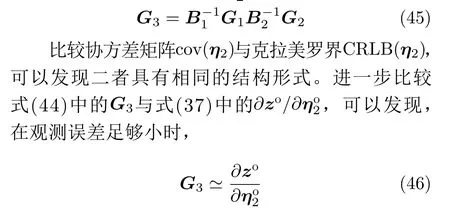
因此,在觀測誤差較小時(shí),本文算法的理論協(xié)方差矩陣與CRLB相等,即本文算法的定位誤差可以達(dá)到CRLB。
5 仿真實(shí)驗(yàn)
本節(jié)通過仿真實(shí)驗(yàn)來評估算法的定位性能。仿真場景如下:觀測站的位置為[ 0,0,0]Tm,速度為0;外輻射源數(shù)量M =4, 其位置分別為[ 2000,0,0]Tm,[0,2000,500]Tm ,[?2000,0,1000]Tm 和[0,?2000,
仿真1 CRLB比較
為了驗(yàn)證本文聯(lián)合DOA-TDOA-FDOA定位方法相比于現(xiàn)有的TDOA定位、DOA-TDOA定位、TDOA-FDOA定位3種定位方式的優(yōu)越性,在圖1中繪制并比較了以上4種定位方式對目標(biāo)位置和速度估計(jì)的CRLB。
從圖1(a)可以看出,在位置估計(jì)方面,基于TDOA定位的位置估計(jì)精度與基于TDOA-FDOA定位相當(dāng)。基于DOA-TDOA定位的位置估計(jì)精度顯著優(yōu)于基于TDOA定位以及基于TDOA-FDOA定位,但略遜于本文基于DOA-TDOA-FDOA定位。從圖1(b)可以看出,在速度估計(jì)方面,基于TDOA定位和基于DOA-TDOA定位由于其觀測量與目標(biāo)速度之間不存在函數(shù)關(guān)系,因此無法估計(jì)出目標(biāo)速度。與基于TDOA-FDOA定位相比,聯(lián)合DOA觀測后,基于DOA-TDOA-FDOA定位的速度估計(jì)精度有了顯著提升。結(jié)合圖1(a)和圖1(b),可以充分看出本文基于DOA-TDOA-FDOA定位方式相比于現(xiàn)有基于TDOA定位、基于DOA-TDOA定位以及基于TDOA-FDOA定位在定位精度方面的優(yōu)越性。
仿真2 不同觀測誤差水平下算法定位精度分析
接下來,比較不同算法在不同觀測誤差水平下的定位性能。為了突出本文算法定位精度,給出了本文算法的均方根誤差和偏差曲線,并將文獻(xiàn)[16]中Chalise等人的算法(基于TDOA的定位算法)、文獻(xiàn)[20]中Li等人的算法(基于DOA-TDOA的定位算法)、文獻(xiàn)[22]中趙勇勝等人的算法(基于TDOA-FDOA的定位算法)對應(yīng)的仿真結(jié)果也一并給出。仿真結(jié)果如圖2所示。
圖2給出了當(dāng)系統(tǒng)的觀測誤差水平ρ 從–20 dB增加到50 dB時(shí),上述4種定位算法的位置估計(jì)和速度估計(jì)均方根誤差和偏差曲線。如圖2(a)所示,在位置估計(jì)均方根誤差方面,基于TDOA的定位算法與基于TDOA-FDOA的定位算法均方根誤差曲線非常接近,而本文算法的位置估計(jì)均方根誤差曲線與基于DOA-TDOA定位算法非常接近,并且在不同觀測誤差下的位置估計(jì)均方根誤差均顯著低于基于TDOA的定位算法與基于TDOA-FDOA的定位算法。這說明了DOA觀測對于位置估計(jì)精度有著顯著提升。此外,局部放大圖進(jìn)一步表明,嚴(yán)格來說本文算法定位精度要略高于基于DOA-TDOA定位算法,這說明FDOA觀測對于位置估計(jì)精度有一定程度的改善,但是改善的程度很小。如圖2(b)所示,在速度估計(jì)均方根誤差方面,本文算法的速度估計(jì)精度要顯著優(yōu)于基于TDOA-FDOA的定位算法,這說明DOA觀測的引入,對于速度估計(jì)精度有顯著改進(jìn)。因此,總體來看,與預(yù)期一致,在不同的觀測誤差水平下,本文算法的位置和速度估計(jì)均方根誤差均低于其他幾種定位算法,并且在觀測誤差水平較低( 20 lg(ρ)≤10dB)時(shí),本文算法的定位均方根誤差可以達(dá)到CRLB。雖然在觀測誤差較大時(shí),本文算法的均方根誤差曲線會逐漸偏離CRLB,但定位精度仍優(yōu)于其余3種算法。本文算法偏離CRLB的原因均在于其算法推導(dǎo)過程中為了進(jìn)行線性化處理,而忽略了2階誤差項(xiàng)。圖2(c)和圖2(d)分別給出了算法對于目標(biāo)位置和速度估計(jì)的偏差曲線。由于定位問題的非線性,幾種算法對目標(biāo)位置和速度估計(jì)的偏差均隨著觀測誤差的增大而增大,但相對來說,本文算法的偏差較小。
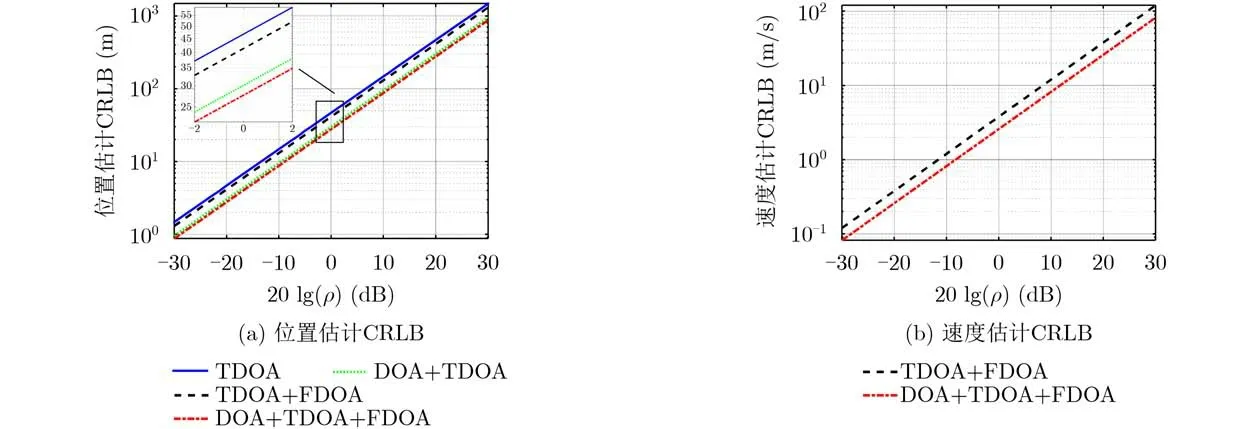
圖1 不同觀測誤差水平下不同定位方式的CRLB比較
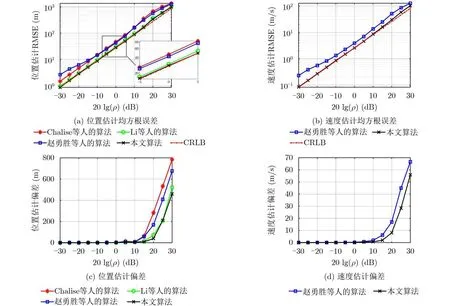
圖2 不同觀測誤差水平下算法的定位精度
仿真3 不同位置下算法的定位精度分析
接下來,分析目標(biāo)所在位置的不同對算法定位誤差的影響。假設(shè)目標(biāo)初始位置為[ ?3000,0,300]Tm,以速度為[ 300,0,0]Tm/s沿著x軸運(yùn)動。觀測誤差水平設(shè)置為 σa=0.1?, σt=100m , σf=1m/s。觀測站和接收站的位置與速度保持不變。不同算法對目標(biāo)的定位誤差精度如圖3所示。
圖3給出了不同位置下算法對目標(biāo)位置和速度估計(jì)的均方根誤差和偏差。可以看出,總體上,在不同的目標(biāo)位置下,本文算法的均方根誤差和偏差依舊低于現(xiàn)有幾種定位算法。比較圖3(a)中不同位置下算法的位置估計(jì)均方根誤差可以看出,總體上,隨著目標(biāo)x坐標(biāo)接近觀測站,算法的位置估計(jì)均方根誤差逐漸減小。值得注意的是,在目標(biāo)x坐標(biāo)接近觀測站時(shí),本文算法的定位均方根誤差出現(xiàn)了偏離CRLB的現(xiàn)象,造成這一現(xiàn)象的原因在于同樣的觀測誤差下,當(dāng)目標(biāo)x坐標(biāo)接近觀測站時(shí),相對觀測誤差(觀測誤差與目標(biāo)到觀測站距離之比)會增大,從而造成算法定位誤差偏離CRLB。此外,當(dāng)目標(biāo)x坐標(biāo)為0時(shí),算法的位置和速度估計(jì)誤差低于CRLB。結(jié)合圖3(c)和圖3(d)中不同位置下算法的估計(jì)偏差情況可以看出,本文算法在目標(biāo)x坐標(biāo)為0時(shí),會出現(xiàn)偏差增大的情況。因此,造成算法估計(jì)均方根誤差在目標(biāo)x坐標(biāo)為0時(shí)低于CRLB的原因是,當(dāng)相對觀測誤差較大時(shí),算法給出的估計(jì)為有偏估計(jì),而對于有偏估計(jì)來說,其算法的定位誤差可以低于CRLB。
6 結(jié)束語
DOA, TDOA和FDOA是無源相干定位系統(tǒng)目標(biāo)檢測和參數(shù)估計(jì)環(huán)節(jié)產(chǎn)生的基本參數(shù)。本文聯(lián)合DOA, TDOA和FDOA觀測,對目標(biāo)位置和速度進(jìn)行估計(jì),提出了一種代數(shù)解定位算法。算法遵循兩步加權(quán)最小二乘基本框架:第1步通過引入輔助參數(shù),將非線性的觀測方程轉(zhuǎn)化為偽線性方程,從中得到目標(biāo)位置和速度的粗估計(jì);第2步通過利用輔助參數(shù)和目標(biāo)位置參數(shù)之間的約束關(guān)系來提高估計(jì)精度。分析了算法的理論誤差,并將其與推導(dǎo)的CRLB進(jìn)行比較。仿真實(shí)驗(yàn)驗(yàn)證了算法的有效性和優(yōu)越性。此外,本文算法假設(shè)外輻射源位置和速度均準(zhǔn)確已知,但實(shí)際中外輻射位置和速度通常存在一定誤差,特別是當(dāng)外輻射源為高度非合作的運(yùn)動輻射源。針對此問題,理論上可以通過利用外輻射源位置和速度誤差統(tǒng)計(jì)特性[27],或者利用位置和速度已知的合作目標(biāo)[28],來降低外輻射源位置和速度誤差對目標(biāo)定位精度的影響,這將是以后進(jìn)一步的研究方向。
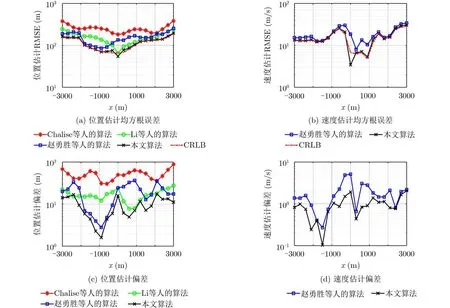
圖3 不同位置下算法的定位精度