基于時頻檢測與極化匹配的雷達無人機檢測方法
2021-04-06 02:11:06王雪松
電子與信息學報 2021年3期
關鍵詞:檢測
楊 勇 王雪松 張 斌
(國防科技大學電子信息系統復雜電磁環境效應國家重點實驗室 長沙 410073)
1 引言
眾所周知,無人機現已廣泛應用于人們的日常生活以及軍事領域。無人機給使用方帶來諸多便利的同時,也給他人或他國的安全、利益帶來了嚴重威脅。為了防止無人機濫用給我國國家安全和人民利益造成損害,及時發現并識別無人機是對入侵無人機進行有效反制的前提。
雷達具有全天時、全天候的特點,利用雷達來檢測識別無人機是世界各國廣泛采用的技術手段。但是,由于無人機飛行高度低、雷達截面積(Radar Cross Section, RCS)小、飛行速度慢,無人機回波較弱,在時域或頻域雷達均難以檢測無人機[1]。為了檢測到無人機信號,雷達通常會降低檢測門限[2],但與此同時,一些強雜波也被雷達檢測出,造成虛警。這樣,雷達無人機檢測問題演化為雷達無人機與雜波虛警鑒別問題。如何挖掘無人機回波與雜波的特征差異,然后利用二者的特征差異來鑒別無人機與雜波,進而剔除雜波虛警,是雷達無人機檢測的關鍵問題[3]。
無人機分為兩類:一類是旋翼無人機,另一類是固定翼無人機。目前,研究旋翼無人機雷達回波特性和識別的文獻較多。學者主要針對旋翼無人機的RCS均值和統計分布[4,5]、多普勒譜[6,7]、微多普勒譜[8–12]、極化[13]、ISAR圖像[5,14]等特性進行了研究分析。在特性研究基礎上,英國Aveillant公司提出利用雷達長時間駐留觀測信號的時頻圖來檢測無人機[8];德國錫根大學[9]、荷蘭應用科學研究機構[10]、韓國先進科技研究所[11]等單位分別利用無人機回波的微多普勒特征來識別多型無人機;挪威國防科學研究院和英國倫敦大學學院聯合利用多個極化特征參數來識別無人機與鳥[13]。值得一提的是,英國Aveillant公司在試驗中遇到了強雜波和鳥的干擾,但其在文獻[8]中并未介紹其如何剔除雜波虛警和鳥的回波。針對旋翼無人機與雜波虛警的鑒別問題,國內外均未見公開報道。
針對固定翼無人機,目前,美國海軍雷達反射率實驗室[15]、美國俄亥俄州立大學[16]、作者團隊[17–19]、北京環境特性研究所[20]、荷蘭應用科學研究機構[10]、北京遙感設備研究所均已開展了雷達固定翼無人機回波暗室和外場測量試驗。其中,美國海軍雷達反射率實驗室[15]、作者團隊[17–19]、北京環境特性研究所[20]結合實測數據研究了固定翼無人機的RCS值和ISAR圖像特性;作者團隊結合暗室測量數據還研究了固定翼無人機RCS分布、回波相位、極化比等統計特性[18];荷蘭應用科學研究機構結合外場試驗數據和仿真數據分析了固定翼無人機的微多普勒譜特性[9]。此外,北京遙感設備研究所開展了多批次固定翼無人機探測外場試驗,并結合試驗數據開展了大量的研究分析工作。在固定翼無人機檢測識別方面,美國俄亥俄州立大學通過暗室測量實驗,分析了MIMO雷達對固定翼無人機的檢測性能[16],除此以外,尚無固定翼無人機檢測識別的公開報道。
本文開展了雙極化雷達固定翼無人機和旋翼無人機外場探測試驗,提出了一種綜合利用時頻、極化信息的雷達無人機檢測方法。該方法先降低雷達檢測門限,以保證利用時頻2維恒虛警率檢測器能夠檢測出無人機;然后,針對由于檢測門限降低引入的雜波虛警,依次利用雙門限檢測、雙極化通道檢測結果匹配等方法逐步剔除雜波虛警,最終實現無人機的檢測和雜波虛警的消除。實測數據處理結果驗證了該方法的有效性。
2 單極化通道時頻檢測
雙極化雷達采用水平或垂直單極化發射,水平和垂直雙極化同時接收。雷達發射線性調頻脈沖信號,發射信號可表示為

雷達對接收信號進行匹配濾波、頻域加窗處理,然后對頻域加窗處理后的輸出信號進行逆傅里葉變換,得到時域輸出信號。以水平極化接收通道為例,匹配濾波與頻域加窗后的時域輸出信號可表示為

其 中, IFT[·] 表 示 逆 傅 里 葉 變 換,S (ω) , H (ω),F (ω)分別為發射信號頻譜、匹配濾波器頻率響應和窗函數頻率響應。
對加窗后的時域輸出信號進行兩脈沖對消,兩脈沖對消后的輸出信號可表示為

對脈沖對消后的輸出信號進行多普勒濾波,從而得到雷達距離多普勒圖。然后,對每個距離-多普勒單元信號進行2維CFAR檢測,判斷每個距離-多普勒單元是否存在目標。2維CFAR檢測判決表達式為

其中, A為一個自然數,它代表雙門限檢測中的第2門限,它的取值直接決定著雷達檢測概率和虛警概率。在實際設置中,需結合數據情況、期望達到的虛警概率和檢測概率來綜合設定[21]。采用式(6)判決時,目標存在時,記為1,目標不存在時,記為0,最終將HH, HV極化通道檢測結果分別存入一 個P ×Q 維矩陣,分別記為DHH和DHV。
3 雙極化通道檢測結果匹配
地面反射屬于體散射,每個距離分辨單元內有很多個散射點,這些散射點的回波相互疊加產生雜波。如果雷達采用距離維CFAR檢測,在HH極化方式下,若干距離分辨單元內的多個散射點回波相干合成,形成很強的雜波,這些距離分辨單元的雜波強度比鄰近距離分辨單元雜波強很多,最終成為雜波虛警。同樣,在HV極化方式下,也會有若干距離單元的雜波較鄰近距離單元的雜波強很多,最終成為雜波虛警。需要說明的是,在一種極化方式下發生虛警的概率并不高。而某一個距離分辨單元的雜波在HH和HV極化方式下均比鄰近距離分辨單元雜波強很多的可能性很低。因為由于極化方式的改變,一個距離分辨單元內多個散射點的回波在HH和HV極化方式下均相干疊加,且疊加后雜波強于臨近距離分辨單元雜波的概率很低。所以,在極大概率上,HH和HV極化方式下的雜波虛警分別來自不同的距離分辨單元。而對于窄帶雷達,無人機可視為點目標,在HH和HV極化方式下檢測出的無人機回波均來自同一個距離分辨單元。這就是雜波虛警和無人機回波的本質區別。
當雷達采用時頻2維檢測時,上述區別仍然存在,只不過產生雜波虛警的對象由距離分辨單元變為距離-多普勒分辨單元,這時,HH和HV極化方式下的雜波虛警分別來自不同的距離-多普勒分辨單元所對應的概率反而更大,這更有利于鑒別雜波虛警和無人機回波。
根據上述原理,結合第2節HH極化通道和HV極化通道的檢測結果,對DHH和DHV中的每個元素進行比對, DHH和DHV中對應元素同時為1時判斷此目標為真目標,當DHH和DHV中對應元素只有一個為1時判斷此目標為雜波虛警。
雙極化雷達檢測方法流程圖如圖1所示。
4 試驗數據分析與驗證
雙極化雷達無人機探測試驗在外場進行。試驗雷達為國防科技大學電子科學學院的雙極化雷達系統,本文涉及的無人機機型包括一型固定翼無人機和大疆S1000八旋翼無人機。雷達試驗場景與固定翼無人機航線圖如圖2所示。

圖1 雙極化雷達無人機檢測方法流程圖

圖2 雙極化雷達無人機外場試驗場景和無人機航線
試驗時,固定翼無人機在400 m左右的高度、距離雷達5~7 km范圍內往返飛行,速度為20 m/s左右;旋翼無人機在距離雷達4 km左右、200 m高度懸停飛行。試驗時,無人機能夠實時反饋其GPS位置和速度信息,在無人機飛行過程中,雷達主波束始終對準無人機。雷達發射水平極化線性調頻信號,接收采用水平和垂直極化同時接收,發射信號脈沖寬度為5 μs,中心頻率為9.4 GHz,帶寬為5 MHz,脈沖重復周期為1.25 ms,雷達采樣率為10 MHz。
4.1 固定翼無人機數據處理結果與分析
對雷達固定翼無人機探測的原始數據進行匹配濾波和頻域加窗處理后輸出時域信號幅度如圖3所示。
從圖3可以看出,固定翼無人機回波位于第250個采樣點附近。多個脈沖觀測時,由于固定翼無人機RCS起伏變化,導致無人機回波若隱若現。特別是在400~800個脈沖,HH和HV通道的固定翼無人機回波強度均較弱。經過統計計算,匹配濾波后,圖3(a)中HH通道的信雜噪比約為3.5 dB。總體上,HH通道回波強度強于HV通道回波強度,但HV通道無人機信雜噪比較HH通道高。

圖3 雷達匹配濾波和加窗后的時域輸出信號幅度
為了驗證本文方法的有效性,下面針對上述1000個脈沖回波數據進行處理。在2維CFAR檢測時,將50個脈沖作為一幀,總共有20幀數據。在對每一幀數據進行FFT和2維CFAR檢測后,再對20幀數據的檢測結果進行積累,設置第2門限進行判決。其中,2維CFAR檢測的保護單元數為2,參考單元數為32。為了檢測到無人機,單幀檢測門限因子取為3。考慮到無人機目標回波信雜噪比不高,有的幀可能檢測不到無人機,因此,采用雙門限檢測時,第2門限不易設置過大。另外,雜波起伏較劇烈,多幀都檢測到雜波的可能性較低。綜上考慮,第2檢測門限設為2。對圖3中的數據依次進行頻域加窗、脈沖對消、多普勒濾波和2維CFAR檢測,得到雙極化雷達對固定翼無人機的多幀檢測結果如圖4所示。圖4表明,經2維CFAR和多幀檢測結果積累與判決后,HH通道和HV通道均能檢測出固定翼無人機,但同時也出現了很多雜波虛警,這些雜波虛警為雷達后續判斷目標類型造成了嚴重不利影響。從圖4可以發現,HH通道和HV通道檢測出的雜波虛警的位置并不重合,而HH通道和HV通道檢測出的無人機目標位置大部分重合,這驗證了本文第2節理論分析的合理性。
在圖4結果的基礎上,經過雙極化通道檢測結果匹配后的多幀檢測結果如圖5所示,其中,圖5(b)為圖5(a)的局部放大圖。圖5(a)表明,經過雙極化通道檢測結果匹配后,固定翼無人機被成功檢測,位置與真實值一致,而雜波虛警被全部消除,這驗證了雙極化通道檢測結果匹配方法的有效性。

圖4 雙極化雷達對固定翼無人機的多幀檢測結果

圖5 雙極化通道對固定翼無人機檢測結果匹配后的結果及其放大圖
另外,圖5(b)表明,經過雙極化通道檢測結果匹配后,多幀檢測的固定翼無人機目標占據多個距離單元,且存在距離徙動;由于無人機的運動,多幀間的無人機多普勒譜會發生移動,另外,由于無人機多普勒譜的展寬,多幀檢測出的無人機回波在頻率上占據一定寬度。為了更加清晰地說明這一現象,我們統計了雷達HH通道每一幀對無人機的檢測結果。其中,第1, 14, 18幀檢測結果如圖6所示。雷達帶寬 B 為5 MHz,采樣率fs為10 MHz,雷達距離分辨率為30 m。在原始數據中,無人機回波在距離維占據2個采樣點( N =fs/B)。當無人機回波較強時,經匹配濾波和FFT之后,無人機回波會在距離維和頻率維展寬。由于無人機回波起伏,不同幀的無人機回波強度不同,因此,各幀無人機回波在距離維和頻率維展寬效應會存在差異。由圖6可見,第1幀和第18幀無人機回波在距離維和頻率維均有一定展寬;第14幀無人機回波在距離維有一定展寬,在頻率維未展寬。第1幀無人機回波在頻率維占據4個采樣點,擴展效應最明顯,這說明目標回波最強。另外,對比第1幀和第18幀無人機回波,我們發現這兩幀無人機回波均在距離維占據5個采樣點,但存在1個采樣點的距離徙動。這是因為兩幀數據中間間隔17幀,在17幀的時間內,無人機在距離上移動了?R=vkTf≈20×17×50×1.25 × 10–3= 21.25 m ( v為無人機速度,k 為幀數, Tf為一幀對應的時長,即50個脈沖重復周期),這超過1個采樣點對應的距離,而又不足2個采樣點對應的距離。

圖6 雷達HH通道單幀對固定翼無人機的檢測結果
為了進一步驗證無人機回波在距離維和頻率維的展寬效應,我們分析了雷達第1幀數據多普勒濾波后的輸出結果,如圖7所示。
圖7表明,第1幀數據在多普勒濾波后,在距離維有5個采樣點強度較大,在頻率維有4個采樣點強度較大,這剛好對應于圖6中的雷達第1幀檢測無人機結果—距離維擴展占據5個采樣點,頻率維擴展占據4個采樣點。以上分析驗證了圖6中檢測結果的正確性。
4.2 旋翼無人機數據處理結果與分析
我們還開展了對大疆S1000旋翼無人機的探測試驗,并利用試驗數據對本文方法進行了進一步驗證。其中,雷達HH, HV極化通道對大疆S1000無人機的檢測結果如圖8所示。
由圖8可見,由于脈沖對消抑制了零頻附近的雜波和旋停無人機機身回波,因此,在零頻附近沒有檢測到雜波虛警或無人機。而在遠離零頻處,HH通道和HV通道均能夠檢測到S1000旋翼無人機,但同時也檢測到很多雜波虛警。檢測到的無人機回波主要是無人機的旋葉回波。由于無人機的多個旋葉相對于雷達視線的速度不一樣,旋葉回波的多普勒譜線存在展寬且不連續。圖8表明,雜波虛警在HH和HV極化通道中出現的位置不一樣,而無人機在HH和HV極化通道中出現的位置有部分重合。對雙極化通道的檢測結果進行匹配,結果如圖9所示。從圖9可見,經過兩個極化通道檢測結果的匹配,旋翼無人機目標得以保留,而雜波虛警被完成剔除,這進一步驗證了本文理論分析的合理性和所提檢測方法的有效性。旋翼無人機懸停在空中,因此,多幀檢測結果不存在距離徙動。但由于旋翼無人機回波的起伏,不同幀的無人機回波強度不一樣,最終會導致不同幀的無人機回波在距離維擴展效應不一樣,即占據的采樣點數不一樣。
5 結束語
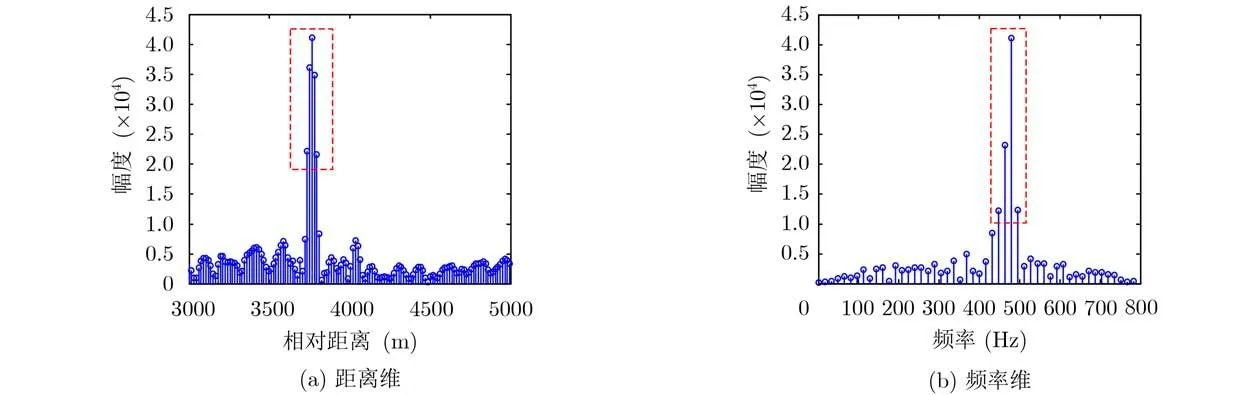
圖7 雷達HH通道第1幀數據多普勒濾波輸出

圖8 雙極化雷達對旋翼無人機的多幀檢測結果

圖9 對雙極化通道旋翼無人機檢測結果匹配后的結果
本文提出了一種時頻檢測與極化匹配相結合的雙極化雷達無人機檢測方法,并采用雙極化雷達探測固定翼和旋翼無人機外場實測數據驗證了該方法的有效性。該方法先降低檢測門限,以檢測出無人機和雜波虛警;然后利用無人機、雜波在雙極化通道檢測結果的差異性來識別無人機和雜波,從而剔除雜波,降低雷達虛警概率。該方法無需雜波和無人機先驗信息,易于實現,具有較強的工程適用性。
值得一提的是,本文通過外場試驗只驗證了所提方法的有效性。對于該方法的理論檢測性能如何,目前,我們正在開展研究分析。另外,在有效檢測出無人機目標之后,如何識別無人機,是一項富有挑戰性的課題。對此,我們也正在開展技術攻關。
致謝
感謝國防科技大學施龍飛、宋鯤鵬、馬佳智、龐晨、逯旺旺、王歡以及航天宏圖湖南分公司張紀陽在外場試驗中給予的幫助。感謝國防科技大學董臻教授對文章提出的寶貴意見。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48