工業管道內機器人通信技術的研究*
2021-03-24 03:25:46鐘永軒陳銳鴻林子涵朱彥昭梁鎮峰
數字技術與應用 2021年1期
關鍵詞:信號
鐘永軒 陳銳鴻 林子涵 朱彥昭 梁鎮峰
(華南理工大學廣州學院機器人工程學院,廣東廣州 510800)
0 引言
在工業中,管道應用十分廣泛,管道負責通風排氣、負責廢料運輸,在工業建設中起重要作用。管道需要定期保養和維護,但管道數量多,維護難度大,維護成本高且耗費大量人力物力。為了提高管道維護的效益,延長管道使用壽命,需要開發一款管道機器人,用于管內巡檢,針對性地對管道進行維護保養[1-2]。管道物理特征并不是統一的,有圓管,有方管;有管徑大的,也有管徑小的;有地溝管道,也有頂層風管;有金屬材質的,也有混凝土材質。目前的管道機器人針對性很強,機械結構和控制方式需要根據特定應用場景進行設計, 滿足越障能力、負載能力和系統集成能力[3]。通信技術選擇也是需要經過嚴密考慮的。
1 機器人通信技術介紹
機器人通信技術有許多,按照介質可以分為有線通信和無線通信兩種。
1.1 有線通信介紹
有線通信是在實體物質上傳播的,通信介質為雙絞線、同軸電纜和光纖。雙絞線根據有無屏蔽層可分為非屏蔽雙絞線(UTP)和屏蔽雙絞線(STP),屏蔽雙絞線的金屬層能夠消除電磁干擾,抗干擾能力強。同軸電纜可分為基帶同軸電纜和寬帶同軸電纜,基帶同軸電纜屏蔽層通常是用銅做的網狀結構,特征阻抗為50Ω,用于傳輸數字信號;寬帶同軸電纜屏蔽層通常是用鋁沖壓而成,特征阻抗為75Ω,用于傳輸模擬信號。光纖和同軸電纜相似,但沒有網狀屏蔽層,中心是光傳播的玻璃心,可以大致分為多模光纖和單模光纖兩類。3種有線通信方式的特征比較如表1所示。
1.2 無線通信介紹
無線通信是利用電磁波信號在自由空間中傳播的特性進行信息交換的通信方式。在無線通信中一般涉及通信協議,通信頻率,通信信道,網絡安全等問題。我們只要把握無線技術的選擇,而無需過度研究硬件技術的開發。無線技術包括常見的蜂窩式網絡(2G/3G/4G/5G)、無線感測網絡(ZigBee、藍牙)、無線網絡(WLAN包括WIFI)。幾種無線通信技術如表2所示,此外無線技術受干擾能力會比有線技術更強,主要受噪聲影響,還與通信頻率有關。

表1 有線通信特征比較Tab.1 Comparison of wired communication characteristics

表2 無線通信技術比較Tab.2 Comparison of wireless communication technologies
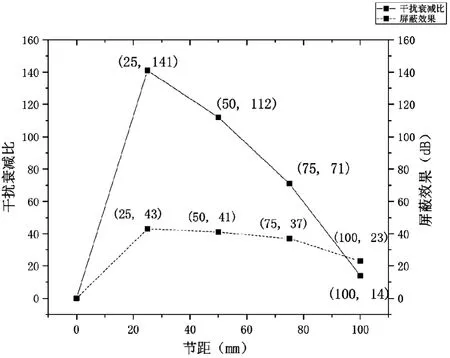
圖1 雙絞節距與屏蔽效果、干擾衰減關系Fig.1 Relationship between twisted pair pitch and shielding effect, interference attenuation
2 機器人有線通信系統研究
2.1 有線控制干擾分析
目前研究的管道機器人較多使用有線控制方式,采用柔性的雙絞線作為通信線纜。管道機器人通信涉及到控制、圖像傳輸和電源這3大部分。如何解決電源線與信號線的布線,是研究人員需要解決的問題,需要根據傳輸距離、信號衰減、成本等因素決定通信方案,因此,把電源線和信號線用一根雙絞線替代布線是一種值得考慮的方案。
雙絞線一般在傳輸頻率低于100kHz,距離較短時適用效果更好,最大傳輸距離為100m。雙絞線中信號干擾主要來自于外部因素干擾和內部線與線之間的串擾[4]。干擾的本質就是電磁感應,電磁感應公式為公式(1)。其中ε為感應電動勢,n為線圈匝數,Δ 為磁通量變化量,B為磁感應強度,面積為S。感應電流公式為公式(2)所示,E為電動勢,R 為阻抗。
根據公式(1)可知,抑制電磁感應可以縮小感應回路面積,從而減小感應電流。而雙絞線繞線的原理就是根據電磁感應得出的,經過紐絞后的線,感應電壓極性相反,在每根導線上的感應電流相互抵消。而屏蔽效果還與紐絞程度有關,節距反應紐絞程度,如圖1所示。
2.2 雙絞線管道機器人通信設計
以我們設計的基于PLC有線控制的管道機器人為例,采用局部屏蔽方式,將電源線(電源電壓為24V)與信號線以膠皮或屏蔽網隔開,如圖2所示,在同一根50m多芯線里面不受干擾,布線結構如圖3 所示,經過威綸通觸摸屏數據測試,數據能夠穩定傳輸,模擬量電壓測試正常,如圖4所示。
PLC與觸摸屏采用RS485通信協議,最高傳輸速率達到10Mbps,且抗噪聲干擾性好,理論上最大傳輸距離能達到1200m。控制方面采用模擬量控制,左輪和右輪各對應一個通道,通過計算車輪參數所對應的理論電壓,與實際測量電壓比較,50m電壓差距低于0.1V,且通道間電壓無偏差。
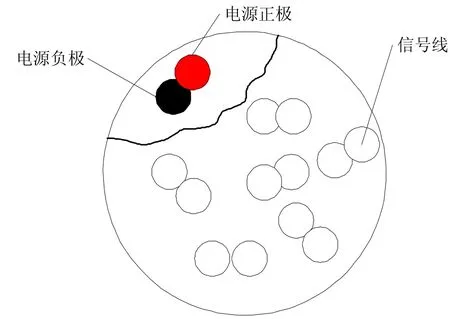
圖2 多芯線內部布線Fig.2 Internal wiring of multicore wire
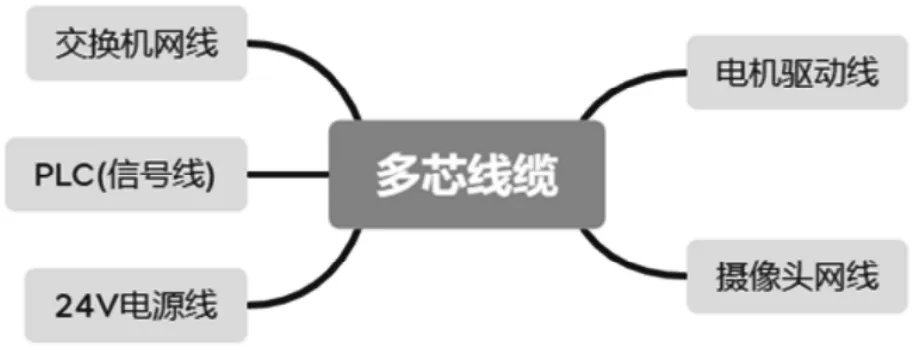
圖3 布線結構Fig.3 Wiring structure
攝像頭經過多芯線和交換機,再將圖像傳輸到PC端。能夠清楚看到管內情況,由于作屏蔽處理,圖像傳輸質量以及響應不受干擾影響[5]。除了導線的紐絞,一般克服干擾方式還有屏蔽、接地、平衡、濾波、隔離等方法,一般都會采取多種措施,實現更穩定的數據通信。
3 機器人無線通信系統研究
有線機器人繞線繁瑣,設備重、搬運不方便,缺乏靈活性。在一些信號干擾弱的管道內,無線機器人更具優勢,可以減少線對車體的載荷,控制靈活,車體可以做得更輕巧,在上下管道時容易操作[6]。在眾多無線通信技術中,我們以WIFI通信作為管道機器人的研究方向。
3.1 無線控制干擾分析
WIFI采用的是802.11協議,工作在2.4GHz的UHF或5G SHF IMS射頻頻段上[7]。WIFI是半雙工通信,若AP和用戶終端使用頻率相等將產生沖突。影響WIFI信號的因素有很多,主要有4大方面[7]:
(1)輸出功率:無線路由輸出功率越大,覆蓋范圍越遠。
(2)天線類型和增益:一般來說外置天線比內置天線對信號的增強作用更明顯。
(3)環境影響:墻壁和障礙物會影響WIFI的信號傳播能力,容易吸收信號的電磁能量。
(4)信道干擾:當附近有較多無線路由信號時,由于WIFI中14個頻道只有1,6,11這三個頻點是互不干擾的,路由器常集中在這3 個信道里,就會容易產生信號的串擾,嚴重干擾正常通信。
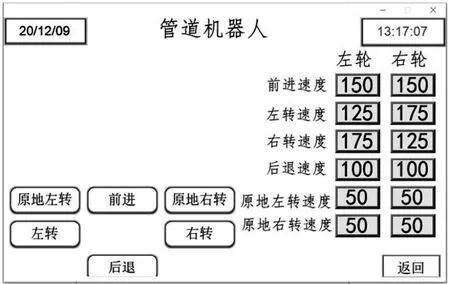
圖4 管道機器人控制界面Fig.4 Control interface of pipeline robot
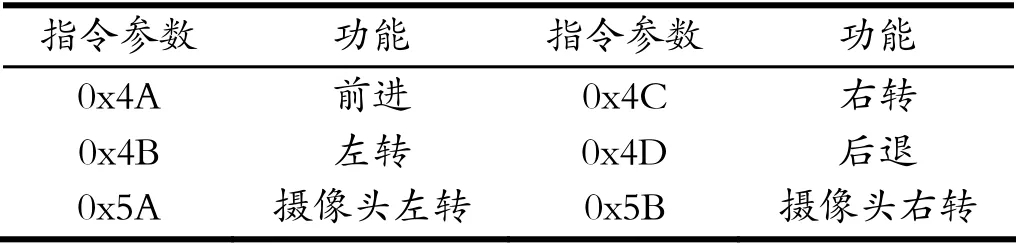
表3 控制指令參數Tab.3 Control command parameters
3.2 無線通信管道機器人設計
在無線管道機器人設計上,采用WIFI模塊,實現圖像傳輸和指令控制功能。在硬件方面, W I F I 模塊使用Openwrt嵌入式Linux系統,實現智能路由聯網功能[8]。在圖像傳輸上,使用Mjpg-streamer推流服務,將掛載在Usb接口上的Mjpg格式的圖像數據,封裝成http協議的視頻流,發送給8080端口。當上位機連接到WIFI模塊上的W I F I 時,就可以對視頻圖像進行實時監控。如圖5 所示,用戶輸入IP地址http://192.168.1.1:8080/?action=stream即可實時顯示圖像,圖中是在實驗室進行通信信號測試及通信距離測試,得出以下結論:空曠環境下信號延遲低,圖像清晰;穿墻能力弱,容易在轉角位出現高延遲,隨著距離的增大信號變弱;附近無線設備增加,容易出現信道干擾。
在管道機器人控制上,也是通過WIFI模塊進行雙向數據轉發,以服務的通信方式允許客戶端(Client)發布請求,由服務端(Server)反饋應答。上位發送指令參數到2001端口,經由Ser2net推送到WIFI的TTL硬件串口,串口對下位機STM32開發板發送指令,STM32開發板接收指令執行[9-10],其過程是通過配置串口的波特率、字長、停止位、校驗位、收發模式和硬件流,初始化串口;利用串口中斷接收函數,以中斷的方式接收指令,當收到指令時會進入中斷函數,觸發串口中斷,接收到一個字節中斷一次;然后進入串口接收完成回調函數,判斷接收指令參數是否滿足條件,若滿足則觸發動作,不滿足則返回錯誤提示且不觸發動作。控制指令如表3所示。反之,下位機STM32開發板反饋數據信息通過串口發送給WIFI模塊,經由Ser2net發送到2001端口,實現上位機數據信息的顯示。
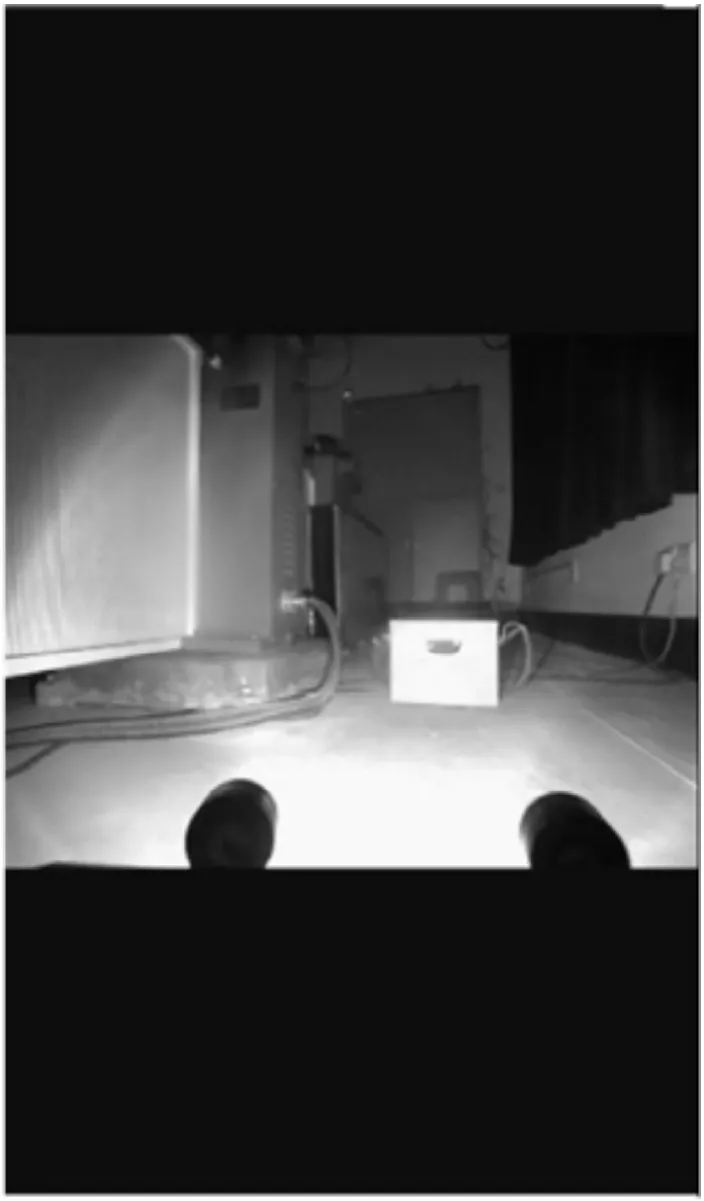
圖5 視頻監控畫面Fig.5 Video monitoring screen
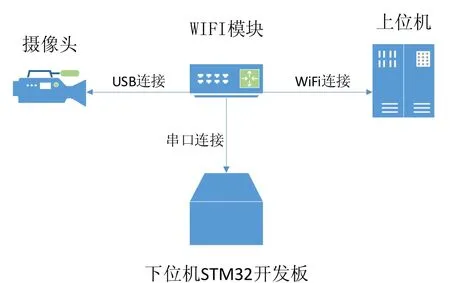
圖6 無線通信連接結構圖Fig.6 Structure diagram of wireless communication connection
無線管道機器人的通信連接結構如圖6所示,以WIFI模塊為核心,通過協議上下位機進行互連,實現網絡層的連接;其次攝像頭與S T M 3 2 單片機數據流實現了物理層的連接,串口通信采用全雙工的通訊方式,允許數據同時在兩個方向上傳輸,傳輸速度快,響應快。
4 結論
通過對工業管道內通信技術研究,對有線通信和無線通信技術作比較分析,并以雙絞線和WIFI通信技術為例,搭建機器平臺,通過迭代的設計方式對管道巡檢機器人進行設計開發,完成模擬場地測試和管內測試,驗證這兩種通信技術的實用性和可行性。為工業管道內通信技術的選擇提供可參考依據。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06