海底泥漿舉升泵驅(qū)動電機(jī)無傳感器矢量控制
2021-03-15 07:34:14李旋何新霞潘輝
電氣傳動 2021年5期
李旋,何新霞,潘輝
(中國石油大學(xué)(華東)新能源學(xué)院,山東青島266580)
在海洋深水鉆井過程中,隨著水深加大,海底疏松的沉積和海水柱作用使得地層孔隙壓力和破裂壓力之間的裕量很小。如果鉆井液柱壓力與地層孔隙壓力不能平衡,將會帶來一系列的井控問題[1-2]。
基于海底泥漿舉升鉆井(subsea mud lift drilling,SMD)的無隔水管鉆井是以雙梯度鉆井技術(shù)為基礎(chǔ)的一種壓力控制鉆井技術(shù)。其基本工作原理是在海底井口附近安裝海底泵,由海底泵通過小直徑管線將井口的含巖屑鉆井泥漿舉升到鉆井平臺上。如圖1所示,井眼環(huán)空中會產(chǎn)生兩個壓力梯度,井口到井底壓力由環(huán)空內(nèi)鉆井液產(chǎn)生,海底到海面壓力由隔水管內(nèi)海水產(chǎn)生。
環(huán)空內(nèi)壓力變化不再以海面為參考點(diǎn),而是以海底泥面為參考點(diǎn),直線的斜度大大減小,環(huán)空內(nèi)地層破裂壓力和地層孔隙壓力窗口相對變寬[3-5]。
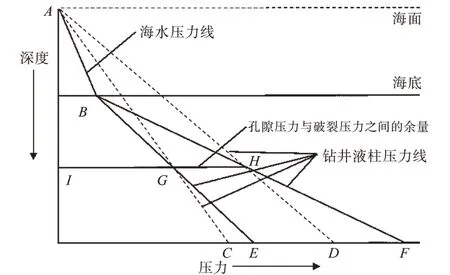
圖1 雙梯度鉆井工作原理圖Fig.1 Working principle of double gradient drilling
在SMD系統(tǒng)中,海底泵的控制問題非常關(guān)鍵。系統(tǒng)對舉升泵的流量和壓力的穩(wěn)定性以及舉升泵的工作范圍都有比較高的要求。文獻(xiàn)[6-7]中的SMD控制系統(tǒng)采用V/F變頻調(diào)速控制,其雖能滿足一般的調(diào)速要求,但是在低速時,由于V較小,而定子電阻上的壓降所占的比例較大,使得電機(jī)的輸出轉(zhuǎn)矩隨著輸出頻率的降低而減小。最大輸出轉(zhuǎn)矩太小將限制調(diào)速系統(tǒng)的帶載能力,且系統(tǒng)的動靜態(tài)特性以及安全性能還需進(jìn)一步改善。根據(jù)SMD系統(tǒng)工作要求與自身高階、大慣性、非線性、強(qiáng)耦合的特點(diǎn),設(shè)計了基于Matlab仿真軟件的SMD系統(tǒng)模型,并搭建實(shí)物實(shí)驗(yàn)平臺對控制策略進(jìn)行驗(yàn)證,研究海底泥漿舉升鉆井系統(tǒng)電機(jī)控制系統(tǒng)的性能。
1 SMD系統(tǒng)總體設(shè)計方案
如圖2所示,在SMD系統(tǒng)結(jié)構(gòu)中,主要由基于轉(zhuǎn)子磁通定向矢量控制的異步電機(jī)控制系統(tǒng)與液壓系統(tǒng)兩部分構(gòu)成。在設(shè)計過程中,先實(shí)現(xiàn)異步電機(jī)控制系統(tǒng)的基本功能,其后加入液壓系統(tǒng)作為負(fù)載實(shí)現(xiàn)整個系統(tǒng)的閉環(huán)調(diào)節(jié)控制。
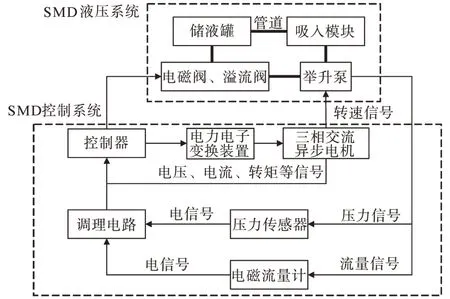
圖2 SMD系統(tǒng)設(shè)計結(jié)構(gòu)圖Fig.2 SMD system design structure
液壓系統(tǒng)主要由舉升泵模塊、泥漿返回管線、壓力閥、吸入模塊等構(gòu)成。根據(jù)比例定律可知,當(dāng)井筒環(huán)空壓力變化時,通過改變電機(jī)轉(zhuǎn)速來控制舉升泵的流量,從而保證井口壓力等于海水靜壓力。
如圖3所示,在海底泥漿舉升鉆井控制系統(tǒng)結(jié)構(gòu)中,主要由電力電子驅(qū)動裝置、三相異步電機(jī)、轉(zhuǎn)子磁鏈觀測器、多環(huán)控制器等組成。其中多環(huán)控制器的設(shè)計方法是從內(nèi)環(huán)到外環(huán),逐個設(shè)計各環(huán)的調(diào)節(jié)器。這樣可以保證每個控制環(huán)是穩(wěn)定的,同時各環(huán)節(jié)層次分明,有助于在設(shè)計時發(fā)現(xiàn)問題所在。當(dāng)電流環(huán)和轉(zhuǎn)速環(huán)內(nèi)的對象參數(shù)變化或受到擾動時,電流反饋和轉(zhuǎn)速反饋能夠起到一定的抑制作用。其中最外環(huán)壓力環(huán)采用PID控制,轉(zhuǎn)速環(huán)、磁鏈環(huán)、電流環(huán)均采用PI控制。電流控制采用磁場定向坐標(biāo)系下的PI控制,需帶有前饋解耦控制量,兩個電流PI調(diào)節(jié)器選取同樣的參數(shù)。
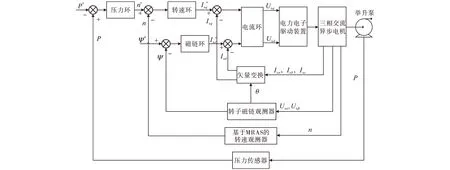
圖3 海底泥漿舉升鉆井控制系統(tǒng)結(jié)構(gòu)框圖Fig.3 Block diagram of the seabed mud lifting drilling control system
2 轉(zhuǎn)子磁通定向矢量控制
SMD系統(tǒng)中異步電機(jī)的動態(tài)數(shù)學(xué)模型是一個高階、非線性、強(qiáng)耦合的多變量系統(tǒng),很難直接通過外加信號準(zhǔn)確地控制電磁轉(zhuǎn)矩。但通過效仿直流電動機(jī)的電流與磁通控制,將電動機(jī)定子電流變換為相互正交的轉(zhuǎn)矩電流分量和勵磁電流分量,則可分別獨(dú)立控制電機(jī)的電磁轉(zhuǎn)矩。以旋轉(zhuǎn)的電動機(jī)磁通作為空間矢量的參考軸,利用旋轉(zhuǎn)坐標(biāo)變換方法,將交流電機(jī)等效為直流電機(jī),從而像控制直流電機(jī)一樣實(shí)現(xiàn)轉(zhuǎn)矩與磁通的準(zhǔn)確控制[8-9]。
根據(jù)轉(zhuǎn)子電壓方程可得轉(zhuǎn)子磁通定向下電動機(jī)磁鏈模型如下式:
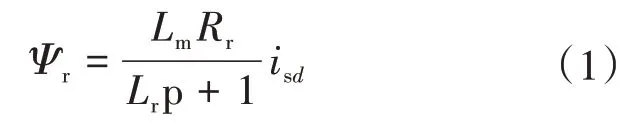
式中:Ψr為轉(zhuǎn)子磁鏈;isd為定子側(cè)電流d軸分量;Lm為勵磁電感;Lr為轉(zhuǎn)子電感;p為微分算子;Rr為轉(zhuǎn)子電阻。
轉(zhuǎn)子磁鏈Ψr完全取決于定子電流d軸分量。
轉(zhuǎn)矩方程式如下式所示:
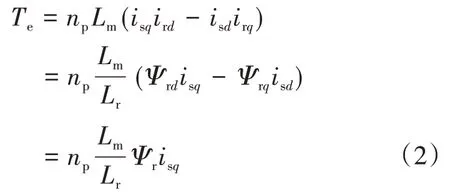
式中:isq為定子側(cè)電流q軸分量;np為極對數(shù)。
電磁轉(zhuǎn)矩完全取決于定子電流q軸分量。
控制定子電流的兩個分量,就可以獨(dú)立控制轉(zhuǎn)子磁通和電磁轉(zhuǎn)矩,從而實(shí)現(xiàn)兩者之間的解耦控制,使得系統(tǒng)簡化。要實(shí)現(xiàn)轉(zhuǎn)子磁通定向控制,必須知道轉(zhuǎn)子磁鏈的幅值和角度。
α-β坐標(biāo)系下定子電壓方程為
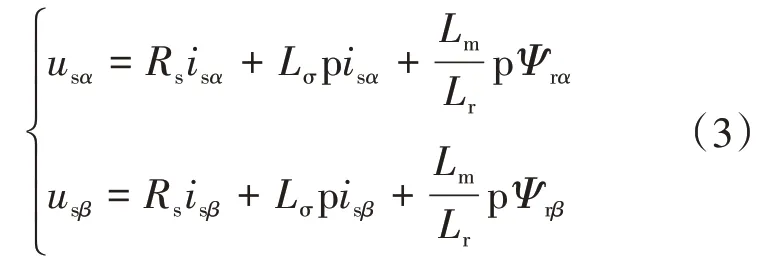
式中:Rs為定子電阻;Lσ為電機(jī)總漏感。
根據(jù)式(3)中感應(yīng)電動勢等于磁鏈變化率的關(guān)系,取電動勢的積分就可以得到磁鏈方程如下式:
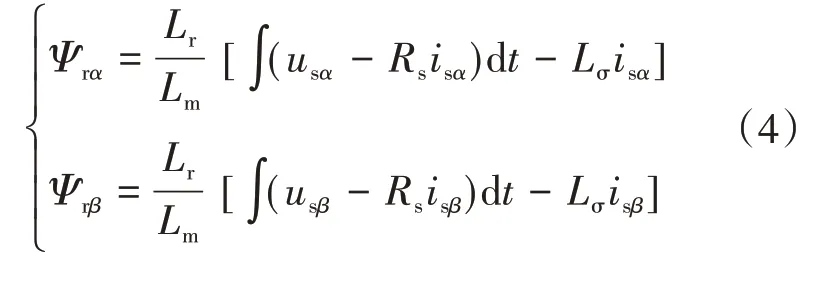
即采用電壓模型設(shè)計轉(zhuǎn)子磁鏈觀測器。
d-q坐標(biāo)系下定子電壓方程為
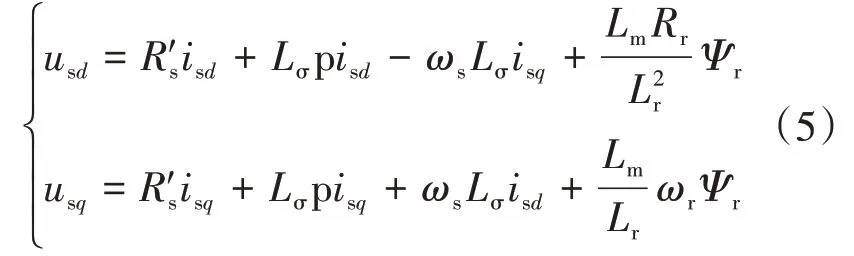
其中
式中:ωs為同步轉(zhuǎn)速;ωr為轉(zhuǎn)子轉(zhuǎn)速。
根據(jù)式(5)可知,在同步旋轉(zhuǎn)坐標(biāo)系下,通過反饋的定子電流d,q軸分量對給定的電機(jī)定子電壓d,q軸分量進(jìn)行自動調(diào)節(jié)。
電機(jī)電壓方程在d,q軸上的成功解耦,使得分別通過電機(jī)定子電壓的d,q軸分量來控制定子電流的勵磁分量和轉(zhuǎn)矩分量得以實(shí)現(xiàn)[10-12]。為完成對電流的精確控制,必須設(shè)計電流反饋環(huán)節(jié)。首先需將d-q同步旋轉(zhuǎn)坐標(biāo)定子電壓方程中的交叉耦合項(xiàng)視為擾動,對此進(jìn)行前饋補(bǔ)償,其補(bǔ)償量如下式:
3 基于模型參考自適應(yīng)控制的轉(zhuǎn)速觀測器
模型參考自適應(yīng)系統(tǒng)[13-14](model reference adaptive system,MRAS)是自適應(yīng)控制系統(tǒng)中的一種,其核心思想是構(gòu)造一個能夠滿足預(yù)期性能的理想模型作為參考模型,然后將被控對象作為可調(diào)模型,其基本結(jié)構(gòu)如圖4所示。
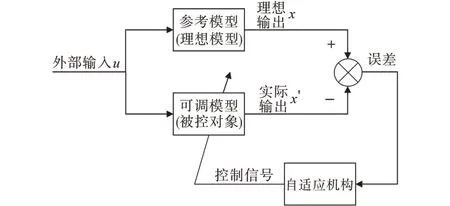
圖4 模型參考自適應(yīng)控制結(jié)構(gòu)圖Fig.4 Model reference adaptive control structure
外部輸入u同時作用在兩個模型上,參考模型輸出x作為一個給定的性能指標(biāo),可調(diào)模型的輸出x′通過自適應(yīng)機(jī)構(gòu)的調(diào)整去逼近x,最后使x與x′的差e趨近于零。
電壓模型和電流模型都可觀測出轉(zhuǎn)子磁鏈,前者與轉(zhuǎn)速無關(guān),后者與轉(zhuǎn)速有關(guān),而轉(zhuǎn)速則是一個要進(jìn)行辨識的未知參數(shù)。根據(jù)模型參考自適應(yīng)原理,將電壓模型作為參考模型,電流模型作為可調(diào)模型,如果兩者存在偏差,則說明估計轉(zhuǎn)速值和實(shí)際轉(zhuǎn)速值不一致。當(dāng)可調(diào)模型估計得出的磁鏈值與參考模型中觀測出的磁鏈值一致,則估算的轉(zhuǎn)速與實(shí)際轉(zhuǎn)速一致。
由以上可推斷出參考模型的磁鏈觀測值與可調(diào)模型估計值之間的誤差與估算速度之間存在一定的聯(lián)系,為了使可調(diào)模型的估計值能逼近真實(shí)的值,要利用可調(diào)模型與參考模型間的狀態(tài)矢量偏差產(chǎn)生一個合適的自適應(yīng)規(guī)律。
將電流模型用估計值表示,如下式:

根據(jù)波波夫超穩(wěn)定理論,推導(dǎo)出電機(jī)轉(zhuǎn)子轉(zhuǎn)速表達(dá)式,如下式:
即以PI調(diào)節(jié)器作為自適應(yīng)機(jī)構(gòu),如下式所示:

當(dāng)誤差趨近于0,電流模型輸出的轉(zhuǎn)子磁鏈與電壓模型輸出的轉(zhuǎn)子磁鏈一致,轉(zhuǎn)子轉(zhuǎn)速保持在一個恒定值,該值就是MRAS辨識出來的電機(jī)轉(zhuǎn)速。
4 仿真研究
SMD液壓系統(tǒng)部分模型如圖5所示,根據(jù)液壓系統(tǒng)實(shí)際構(gòu)成情況,從子元件庫Hydraulic里選擇油液模塊、離心泵、壓力源、管道等元件,根據(jù)參數(shù)因果關(guān)系進(jìn)行連接,并設(shè)置相應(yīng)參數(shù)。其中,海水的平均密度為1.025 g/cm3,舉升高度恒定為1 200 m。由于舉升泵的入口壓力給定值與海水的靜水壓力相等,故入口壓力源設(shè)為12 MPa。鉆井液密度為1.3 g/cm3,鉆井深度為600 m,當(dāng)環(huán)空頂部壓力與海底靜水壓力之間的壓差為0時,井底壓力為19.6 MPa。
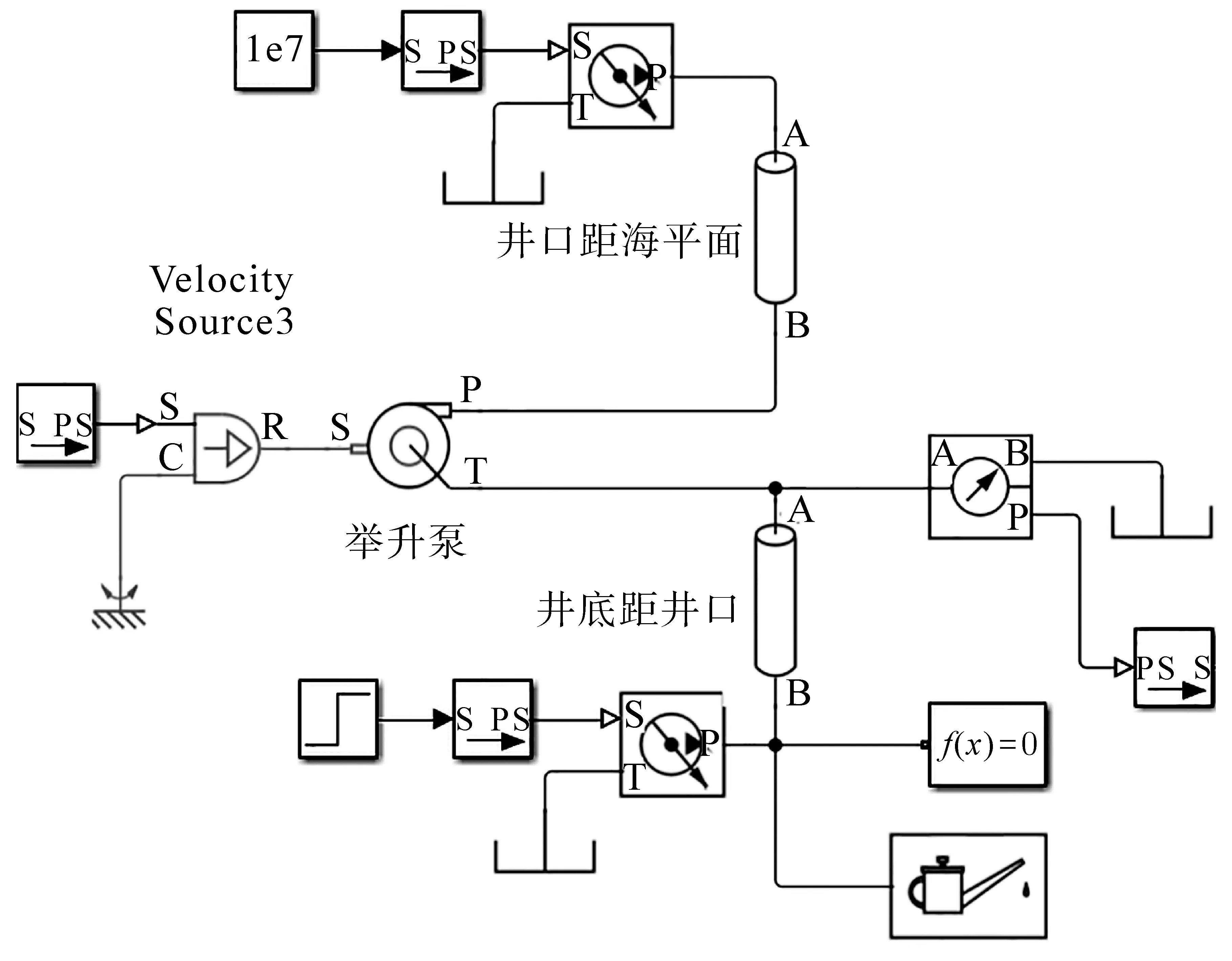
圖5 SMD液壓系統(tǒng)部分模型Fig.5 SMD hydraulic system partial simulation
基于轉(zhuǎn)子磁通定向的SMD系統(tǒng)如圖6所示,將液壓系統(tǒng)作為控制系統(tǒng)的控制對象,即電機(jī)轉(zhuǎn)速控制離心泵的壓力,而泵的壓力值又作為壓力環(huán)的反饋值調(diào)節(jié)轉(zhuǎn)速環(huán)ASR的給定輸入。其中,子模塊MRAS是基于模型參考自適應(yīng)的磁鏈與轉(zhuǎn)速觀測模型,其輸出的磁鏈幅值與角度繼而影響磁鏈環(huán)AΨR與電流環(huán)ACR的控制。設(shè)計兩個電流PI調(diào)節(jié)器,分別為勵磁電流PI調(diào)節(jié)器和轉(zhuǎn)矩電流PI調(diào)節(jié)器,兩個PI調(diào)節(jié)器的設(shè)計方法完全相同。電流內(nèi)環(huán)的作用是在電機(jī)啟動過程中能夠以最大電流啟動,同時在外部擾動下能夠快速恢復(fù),加快動態(tài)跟蹤響應(yīng)速度,提高系統(tǒng)的穩(wěn)定性。
三相異步電機(jī)的參數(shù)設(shè)置如下:額定功率110 kW,額定電壓400 V,額定頻率50 Hz,額定轉(zhuǎn)速1 487 r/min,電機(jī)極對數(shù)2,定子電阻0.021 55 Ω,定子電感0.226 mH,轉(zhuǎn)子電阻0.012 31Ω,轉(zhuǎn)子電感0.226 mH,勵磁電感10.38 mH,轉(zhuǎn)動慣量2.3 kg·m2,摩擦因數(shù)0.054 21(N·m-1)/s。
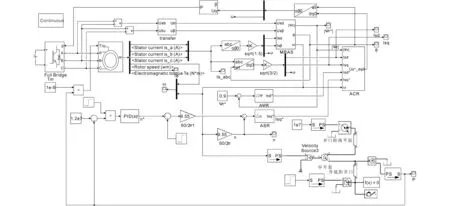
圖6 基于轉(zhuǎn)子磁通定向的SMD系統(tǒng)Fig.6 SMD system based on rotor flux orientation
系統(tǒng)在2 s時,給定轉(zhuǎn)速由191 r/min上升至477.5 r/min,6 s時壓力外環(huán)的給定輸入為12 MPa,相當(dāng)于突遇壓力較小的地層,控制各部分性能曲線如圖7、圖8所示。6 s時鉆井液產(chǎn)生的壓力大于地層破裂壓力,通過增大電機(jī)轉(zhuǎn)速,從而增加舉升泵流量,使環(huán)空頂部壓力減小,井底壓力也隨之減小。因?yàn)殂@井系統(tǒng)具有大慣性,轉(zhuǎn)速與壓力響應(yīng)具有一定滯后性,但泵的出口壓力依然能夠較快地穩(wěn)定在12 MPa。
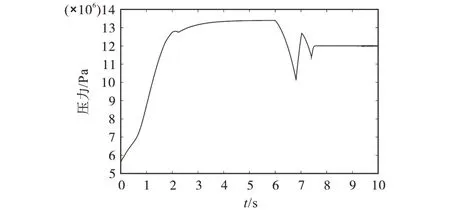
圖7 泵出口壓力變化曲線圖Fig.7 Pump outlet pressure curve
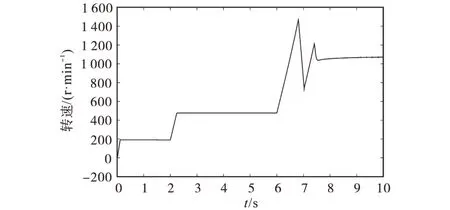
圖8 異步電機(jī)轉(zhuǎn)速變化曲線圖Fig.8 Asynchronous motor speed change curve
基于MRAS的轉(zhuǎn)速觀測值波形如圖9所示,通過MRAS觀測的轉(zhuǎn)速值與實(shí)際轉(zhuǎn)速相比誤差較小,能夠取代傳統(tǒng)的轉(zhuǎn)速測量儀器,實(shí)現(xiàn)海底泥漿舉升泵驅(qū)動電機(jī)無傳感器控制。
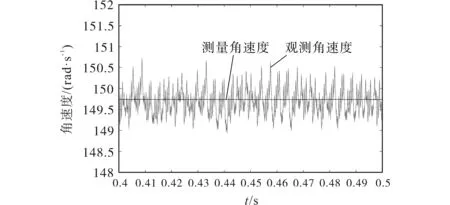
圖9 基于MRAS的轉(zhuǎn)速觀測值Fig.9 Speed observations based on MRAS
5 實(shí)驗(yàn)結(jié)果與討論
異步電機(jī)無傳感器矢量控制系統(tǒng)硬件平臺主要包括驅(qū)動功率電路和控制電路。其中驅(qū)動功率電路由整流電路、濾波電路和智能功率模塊IPM逆變電路組成,而控制電路以TMS320F28335 DSP為核心板,編程設(shè)計控制算法,另含有檢測電路、隔離電路等。系統(tǒng)運(yùn)行時,通過檢測電路將電壓、電流信號傳給DSP的A/D采樣模塊,經(jīng)過矢量變換作為電流內(nèi)環(huán)的反饋。產(chǎn)生的SVPWM控制信號經(jīng)過光耦隔離,驅(qū)動IPM逆變模塊輸出異步電機(jī)所需電壓。并且如果系統(tǒng)出現(xiàn)過電壓故障時,DSP立即封鎖PWM輸出信號,保護(hù)IPM模塊。
系統(tǒng)的軟件設(shè)計采用前后臺架構(gòu),包括主程序和中斷服務(wù)子程序。其中主程序主要定義變量,并對寄存器以及變量的值進(jìn)行初始化,包括時鐘模塊、A/D轉(zhuǎn)換模塊、事件管理器EVA和GPIO模塊、看門狗模塊以及中斷標(biāo)志模塊等。初始化模塊僅在DSP上電復(fù)位后執(zhí)行1次,然后判斷各事件的標(biāo)志,滿足進(jìn)入中斷的條件時進(jìn)行后續(xù)處理。中斷服務(wù)子程序包括AD采樣模塊,SVPWM信號模塊,數(shù)字PID控制器模塊,轉(zhuǎn)子磁鏈觀測模塊,MRAS轉(zhuǎn)速估算模塊。程序設(shè)計流程框圖如圖10所示。
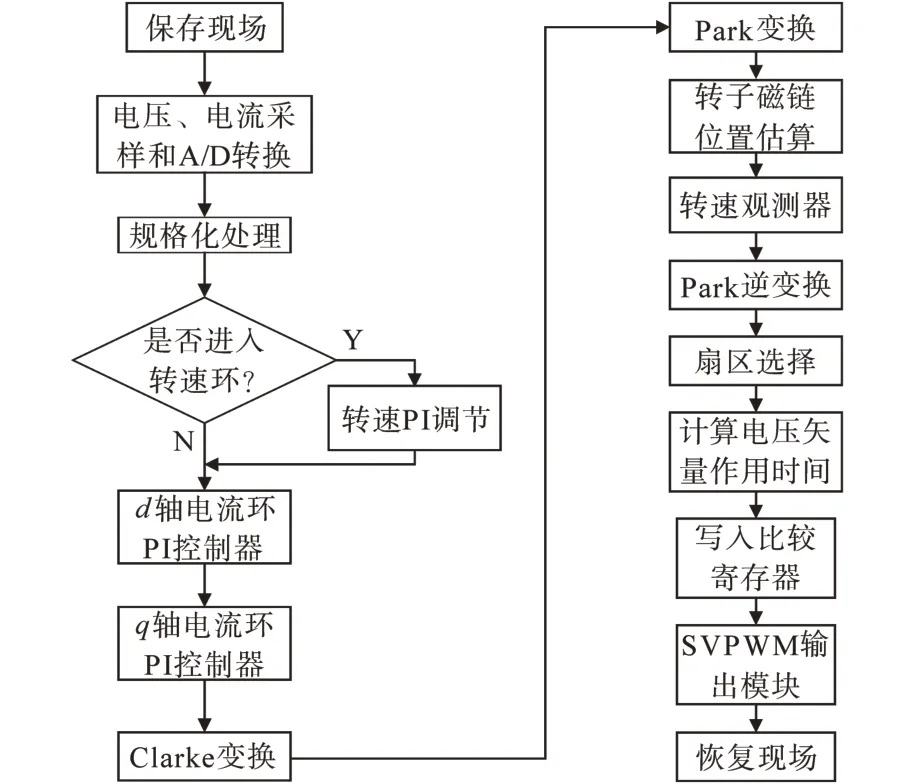
圖10 矢量控制程序設(shè)計流程框圖Fig.10 Vector control program design flow diagram
為了編程方便,對其中一些參量進(jìn)行了標(biāo)幺化處理。圖11、圖12為實(shí)驗(yàn)具有代表性的波形圖,可以看出,轉(zhuǎn)子磁鏈角度變化平滑,在0~2π之間交替循環(huán)變化,轉(zhuǎn)速波動較小,系統(tǒng)穩(wěn)定運(yùn)行,具有良好的控制性能。
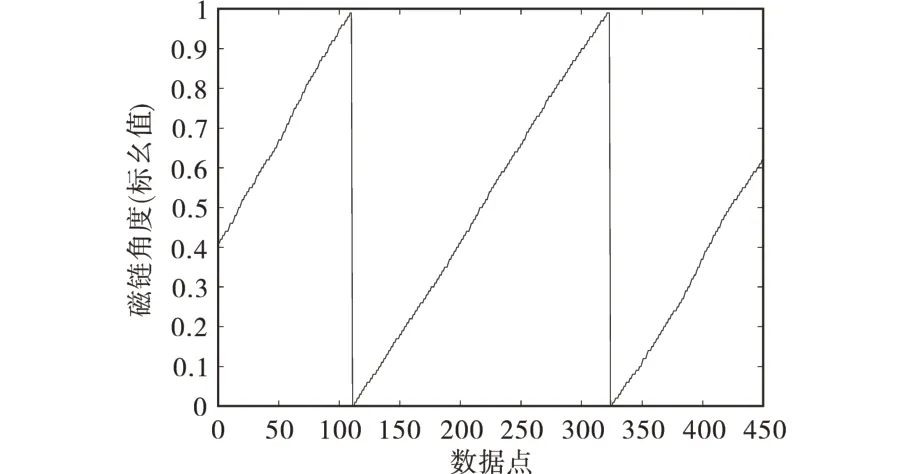
圖11 轉(zhuǎn)子磁鏈變化角度Fig.11 Rotor flux change angle
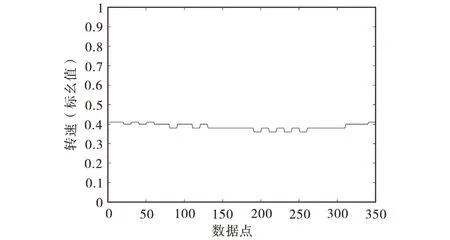
圖12 實(shí)驗(yàn)觀測轉(zhuǎn)速波形Fig.12 Experimental observation of the speed waveform
6 結(jié)論
通過仿真與實(shí)驗(yàn)對海底泥漿舉升控制系統(tǒng)性能進(jìn)行研究。基于MRAS的無傳感器矢量控制使得異步電機(jī)能夠?qū)崿F(xiàn)轉(zhuǎn)矩與磁通的解耦準(zhǔn)確控制,有效地解決了SMD系統(tǒng)高階、非線性、強(qiáng)耦合的控制難題,并一定程度上提高了系統(tǒng)的帶載能力與動靜態(tài)性能,能夠滿足海底泥漿舉升系統(tǒng)的工況要求。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
