基于改進全階滑模觀測器的IPMSM無傳感器控制
2021-03-15 07:34:14曹新平尹忠剛張彥平張延慶
電氣傳動 2021年5期
關鍵詞:實驗
曹新平,尹忠剛,張彥平,張延慶
(1.西安理工大學電氣工程系,陜西西安710048;2.西安交通大學電力設備電氣絕緣國家重點實驗室,陜西西安710049)
內置式永磁同步電機(interior permanent magnet synchronous motors,IPMSM)因其轉矩密度大、功率密度高、調速范圍寬等優點,在航空航天、軌道交通和家用電器等領域得到了廣泛的應用[1]。由于安裝位置傳感器會導致系統成本增加,可靠性降低,因此,IPMSM無位置傳感器控制受到眾多學者的廣泛關注及研究。目前,無位置傳感器策略按電機轉速運行有效范圍,一般分為零/低速和中高速兩大類:零/低速方法主要利用電機凸極特性通過外加激勵獲取位置信息[2-3];中高速方法主要是基于電機反電動勢模型求取位置信息[4-15]。
在中高速領域,基于電機反電動勢的控制方法主要包括模型參考自適應[5-6]、擴展卡爾曼濾波器[7]、滑模觀測器[8-15](sliding mode observer,SMO)等方法。其中,滑模觀測器因其實現簡單、魯棒性強等優點,在永磁同步電機中高速無位置傳感器驅動領域的研究最為普遍。然而,傳統SMO因其滑模控制函數固有的不連續切換引起的抖振是不可避免的。文獻[8]和文獻[9]分別利用飽和函數和sigmoid函數代替符號函數以減弱觀測反電動勢中的高頻抖振。然而,基于sigmoid函數的滑模觀測器控制系統因高頻信號切換導致系統存在較大抖振,針對此問題,文獻[10]提出了一種分段指數型函數代替sigmoid函數的新型滑模觀測器,進一步削弱了系統抖振。文獻[12-13]將定子電流和反電動勢作為狀態變量構造了全階滑模觀測器,既省去了低通濾波器(low pass filter,LPF)又能夠有效抑制抖振,并且具有較好的觀測效果。
本文提出了一種改進型全階滑模觀測器的無位置傳感器控制方法。首先,以準符號函數作為滑模控制函數,達到削弱抖振和提高反電動勢估計性能的目的;其次,設計與電機轉速相關的自適應滑模增益,以避免電機轉速變化影響轉子位置的估計精度。實驗結果驗證了基于改進型全階滑模觀測器的IPMSM無位置傳感器控制方法的正確性和有效性。
1 全階滑模觀測器設計
1.1 IPMSM數學模型
內置式永磁同步電機在兩相靜止(α-β)坐標系下的定子電壓方程為

其中

ΔL=Ld-Lq
式中:uα,uβ,iα,iβ,eα,eβ分別為α,β軸定子電壓、定子電流和反電勢;Rs,ωr,θr,Ψf分別為定子電阻、電角速度、轉子位置和永磁體磁鏈;id,iq,Ld,Lq分別為兩相旋轉(d-q)坐標系下的電流和電感;p為微分算子。
IPMSM的定子電流狀態方程為

通常,調速系統的電磁時間常數遠小于機械時間常數,則電機轉速在一個PWM采樣周期內近似為定值,即pωr=0。因此反電動勢的動態變化為
由式(2)和式(3)可得IPMSM全階狀態方程為

其中i=[ iαiβ]Te =[ eαeβ]Tu =[ uαuβ]T
A11=(-Rs·I+ωrΔL·J)/LdA12=-I/Ld
A22=ωr·J B1=I/Ld
1.2 傳統全階滑模觀測器設計
為了獲得估計反電動勢,根據式(4)設計傳統全階滑模觀測器(full-order sliding mode observer,FSMO)為

其中
式中:“^”表示估計值;“~”表示估計值與實際值之間的誤差;ωe為估計電角速度;sgn()為符號函數;G為反饋增益矩陣;g,l為開關增益。
將式(4)和式(5)作差,可得定子電流誤差和反電動勢誤差的動態方程為

其中
隨著系統到達滑模面,定子電流誤差將趨近于0,可以獲得估計的反電動勢。圖1為傳統FSMO估計轉子位置及轉速框圖。通過FSMO獲得估計反電動勢,再采用鎖相環獲取估計轉子位置θe和估計轉速ωe。然而,由于傳統FSMO采用符號函數會導致估計反電動勢存在高頻抖振,因此需要替換符號函數以削弱其產生的抖振現象。
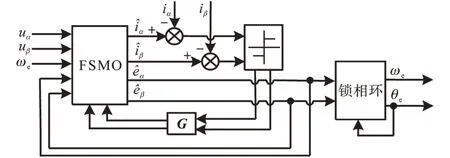
圖1 傳統全階滑模觀測器結構框圖Fig.1 Diagram of traditional FSMO
1.3 改進型全階滑模觀測器設計
為了削弱由符號函數導致的固有抖振,利用準符號函數代替FSMO中的開關函數。圖2為準符號函數的特性曲線圖,其表達式如下:
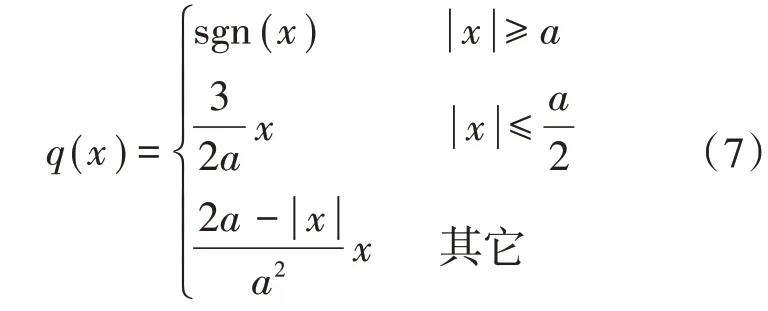
式中:x為定子電流誤差;a為邊界層厚度。
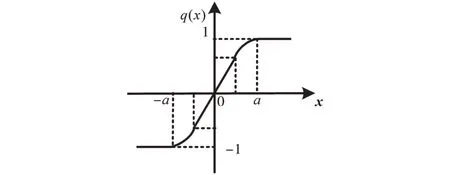
圖2 準符號函數Fig.2 The quasi-sign function
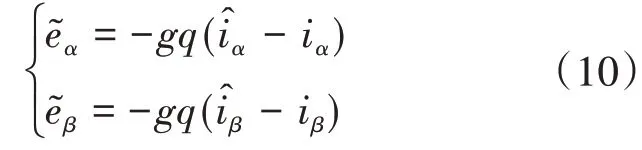
對式(5)進行改進,可獲得改進型全階滑模觀測器的表達式為

定子電流誤差和反電動勢誤差的動態方程為

當系統到達滑模面,估計轉速將等于實際轉速,即ωe=ωr。此時,兩個不連續開關控制分量的等效控制信息可以通過下式獲取:
由于高速區的開關函數增益不能滿足低速區的要求,導致觀測值存在噪聲干擾,使轉子位置估計不準確[14-15]。考慮電機反電動勢幾乎正比于電角速度,因此,設計與電角速度相關的自適應反饋增益為

式中:b為防止零速時反饋增益為0的正常數。
根據式(11),式(10)可以改寫為
由上文所述,改進型全階滑模觀測器的結構框圖如圖3所示。

圖3 改進型全階滑模觀測器結構框圖Fig.3 Improved full-order sliding mode observer structure
2 穩定性分析
采用等效控制的思想和構造Lyapunov函數對改進型全階滑模觀測器進行穩定性分析,首先構造Lyapunov函數如下:

當滿足Lyapunov穩定性理論時,即p V<0,改進型FSMO滑動模態存在且收斂,則有
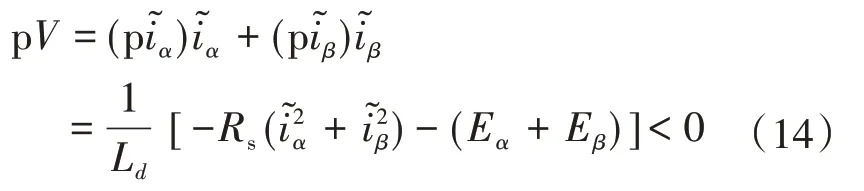
其中
為使Eα+Eβ>0成立,滑模增益g0需要滿足:

當電機發生參數失配或外部擾動時,g0應足夠大以保證改進型FSMO的魯棒性。隨著V衰減至0,即系統到達滑模面,則觀測值收斂于實際值。
根據式(9)和式(12),反電動勢的動態誤差方程為
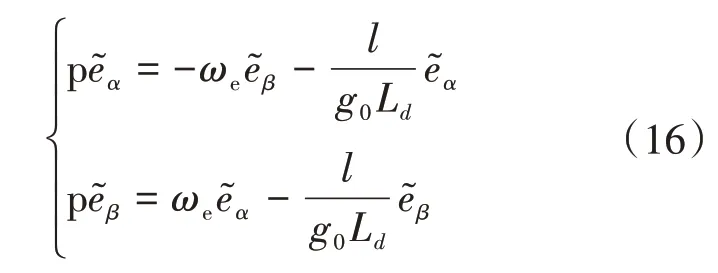
由式(16)可知,反電動勢動態誤差方程具有誤差校正和預測的卡爾曼濾波特性。因此,改進型FSMO可以省去傳統SMO中采用的LPF,進而避免了LPF對轉子位置觀測值產生的相位滯后。此外,假定ωe為常數,求解式(16)可得其特征方程及特征根分別為
式中:s為Laplace算子;j為虛數單位。
由式(18)可知,特征方程存在一對位于s左半平面的共軛復根,因此系統漸進收斂。
3 實驗驗證
為了驗證本文所提出的基于改進型全階滑模觀測器無位置傳感器控制策略的可行性,在以TMS320F28335為主控芯片的2 kW IPMSM矢量控制平臺上進行了實驗研究。圖4為所提出的IPMSM無位置傳感器控制策略框圖,圖5為實驗平臺。
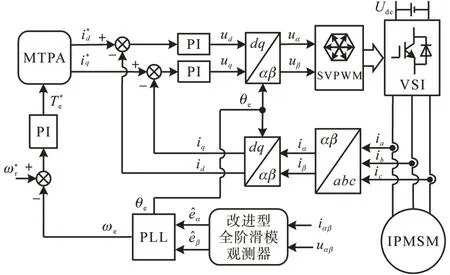
圖4 基于改進型全階滑模觀測器的IPMSM無位置傳感器控制框圖Fig.4 Block of the IPMSM position sensorless control based on improved FSMO
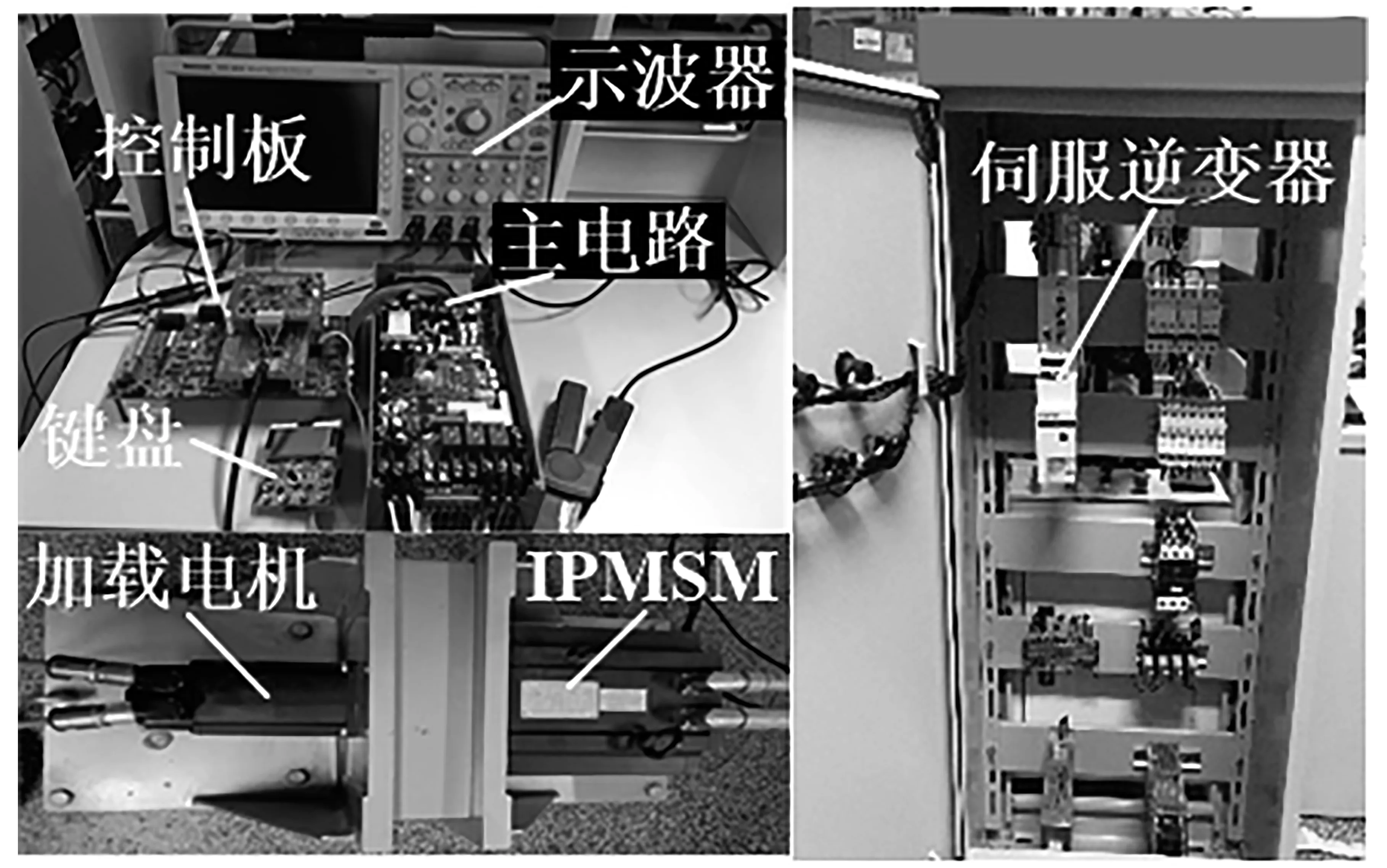
圖5 實驗平臺圖Fig.5 Experimental platform
實驗中使用的IPMSM參數如下:額定功率PN=2 kW,額定轉速nN=1 000 r/min,額定轉矩TN=19 N·m,定子電阻R=1.351Ω,d軸電感Ld=10.85 mH,q軸電感Lq=25.52 mH,極對數為4。通過旋轉變壓器獲得的轉子位置和轉速僅用于與估計的轉子位置和轉速進行對比。
圖6為額定負載條件下,電機運行于300 r/min時的估計反電動勢實驗對比圖。圖6a和圖6b分別為傳統FSMO和改進FSMO實驗結果。從圖6中可看出,改進FSMO可以有效削弱系統抖振,且反電勢的正弦性相比傳統FSMO更好,表明本文所提出的無位置傳感器控制策略的觀測性能更優。
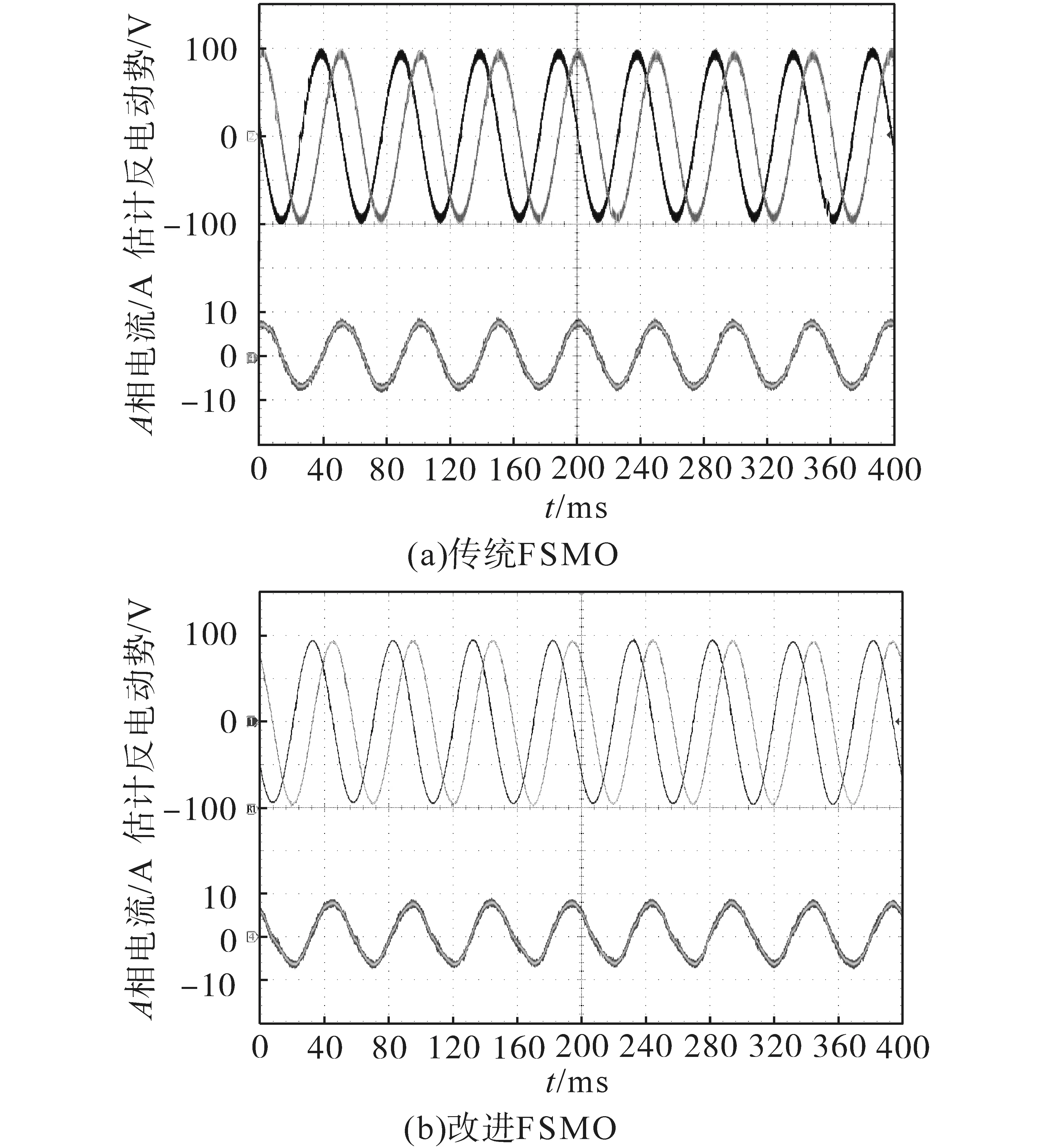
圖6 觀測反電動勢實驗結果圖Fig.6 Estimated back EMF results
為了驗證本文所提出的控制策略在低速域的有效性,圖7為150 r/min時額定負載條件下轉子位置、位置誤差和相電流實驗結果。圖7a和圖7b分別為傳統FSMO和改進FSMO實驗結果。可以看出,圖7a中的位置誤差脈動達到11°,且相電流存在明顯的波形畸變;圖7(b)中的位置誤差脈動為7°。因此,本文所提出方法具有更好的轉子位置估計精度。
圖8為額定負載條件下加減速動態實驗結果,比較了傳統FSMO和改進FSMO無位置傳感器控制策略在額定負載條件下電機轉速從150 r/min上升至1 000 r/min再下降至150 r/min的加減速實驗波形。由圖8可知,本文所提出無傳感器策略的位置誤差明顯減小,且在加減速過程中具有良好的轉速及轉子位置觀測性能。
圖9為電機運行于1 000 r/min時的額定負載擾動實驗結果。圖9a和圖9b分別為傳統FSMO和改進FSMO的實際轉速、轉速誤差及轉子位置誤差實驗波形。由圖9可以看出,相比于傳統FSMO,本文所提策略在負載擾動發生變化前后,轉速誤差及轉子位置誤差更小。因此,本文所提出的控制策略具有較好的抗負載擾動能力。
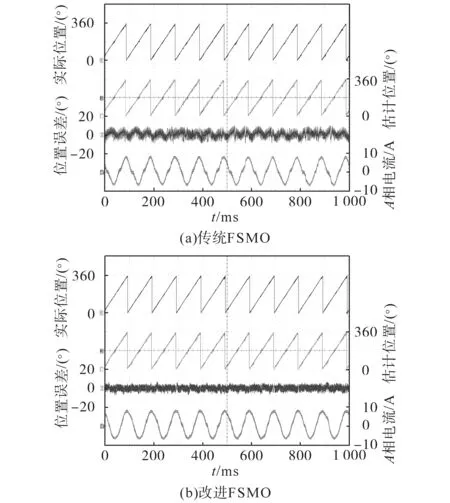
圖7 150 r/min時額定負載下觀測的轉子位置及位置誤差實驗結果Fig.7 Estimated rotor position and position error at 150 r/min under rated load
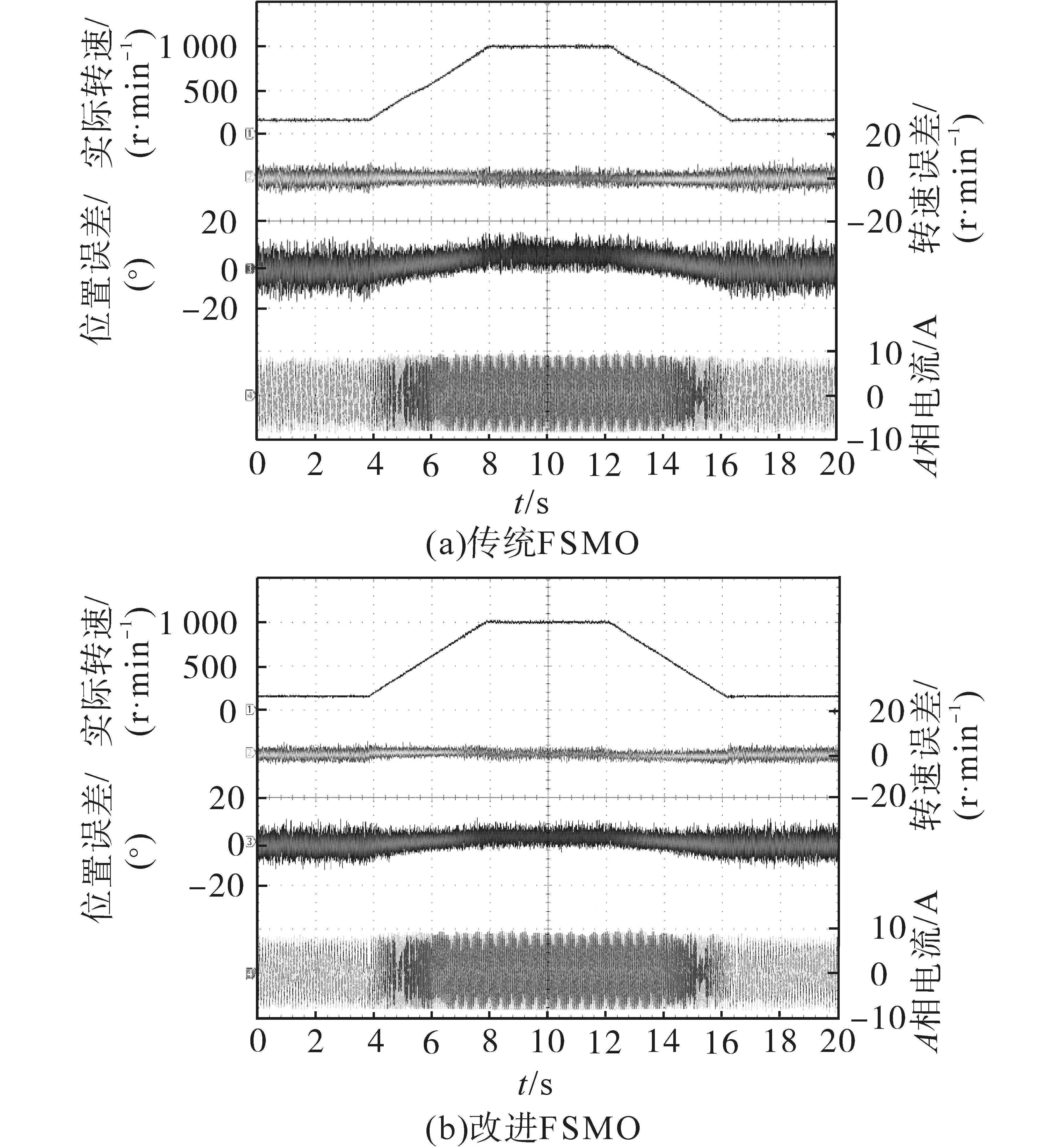
圖8 額定負載條件下加減速動態實驗結果Fig.8 Experimental results at acceleration and decele ration under rated load

圖9 1 000 r/min時負載擾動對比結果Fig.9 Experimental comparison with step load disturbance in 1 000 r/min
4 結論
本文提出了一種基于改進型全階滑模觀測器的IPMSM無位置傳感器控制策略以削弱系統抖振,從而提高IPMSM無位置傳感器驅動系統的估計轉子位置精度。利用準符號函數取代傳統FSMO中的符號函數,并且設計了自適應滑模增益,通過實驗驗證了本文所提出的無位置傳感器控制策略能有效削弱系統抖振,并且提高了反電動勢的觀測精度。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
