基于深度學(xué)習(xí)和物聯(lián)網(wǎng)技術(shù)的智慧污水管控系統(tǒng)
2021-03-11 03:06:24周長亮王明麗
安全與環(huán)境工程 2021年1期
周長亮,苗 盛,王明麗,柳 超
(1.青島大學(xué)數(shù)據(jù)科學(xué)與軟件工程學(xué)院,山東 青島 266071;2.山東省青島生態(tài)環(huán)境監(jiān)測中心, 山東 青島 266003;3.青島理工大學(xué)環(huán)境與市政工程學(xué)院,山東 青島 266033)
在智慧城市建設(shè)中,水資源的智慧化管理是其不可或缺的一環(huán),智慧水務(wù)對促進(jìn)城市的長期健康發(fā)展具有重大意義,國內(nèi)外學(xué)者已經(jīng)對此做了積極的探索。目前,我國大部分污水處理廠都是人工操作狀態(tài),不僅費(fèi)時費(fèi)力,而且安全風(fēng)險問題也較為突出。應(yīng)用物聯(lián)網(wǎng)技術(shù),管理人員可以實(shí)現(xiàn)對污水處理過程的信息化管理,同時自動控制已成為解決污水處理智能化運(yùn)行問題的熱點(diǎn)之一。把控制技術(shù)應(yīng)用到污水處理系統(tǒng)中,可以有效地降低人力成本,減輕對專家知識的消耗,提高處理效率,節(jié)省能源消耗,保證系統(tǒng)穩(wěn)定運(yùn)行。目前國內(nèi)外已經(jīng)有很多研究者使用自動控制技術(shù)來解決污水處理所帶來的問題。此外,污水處理過程對數(shù)據(jù)的數(shù)量和質(zhì)量要求較高,傳統(tǒng)的數(shù)據(jù)驅(qū)動方法無法描述污水處理過程的生化反應(yīng)機(jī)制,并且單一模型難以保證測量精度,通過遠(yuǎn)程交互進(jìn)行數(shù)據(jù)采集,從而準(zhǔn)確預(yù)測污水水質(zhì)變化,在國內(nèi)已有不少針對于此的研究與探討。在污水處理過程中,由于其不確定因素和外界干擾而出現(xiàn)故障的幾率大增,而故障預(yù)測是建立在大量已有數(shù)據(jù)的基礎(chǔ)上,通過對設(shè)備故障進(jìn)行預(yù)測,可為系統(tǒng)的平穩(wěn)運(yùn)行提供支撐,并可延長設(shè)備使用壽命,有效降低設(shè)備故障率。在對污水處理過程的故障預(yù)測方面,國內(nèi)也已經(jīng)取得了很多研究成果。如慈嘉偉等將加權(quán)模糊聚類算法用于污水處理過程的故障檢測,結(jié)果表明該算法可有效加快收斂速度,降低迭代次數(shù);肖紅軍等在結(jié)合動態(tài)數(shù)據(jù)特性的基礎(chǔ)上,提出了一種基于變分貝葉斯混合因子的動態(tài)故障診斷方法,有效降低了故障診斷的誤報率和漏報率;劉成忠等利用基于鄰域粗糙集的支持向量機(jī)(Support Vector Machine,SVM)算法實(shí)現(xiàn)了污水處理過程中故障的自動診斷,提高了故障診斷的效率并具有較好的推廣性。
通過上述研究現(xiàn)狀分析可知,污水處理領(lǐng)域尚存在以下問題:部分智慧水務(wù)項(xiàng)目僅實(shí)現(xiàn)了較為基礎(chǔ)的遠(yuǎn)程監(jiān)控,沒有實(shí)現(xiàn)智能化運(yùn)行;自動控制考慮的因素較為單一,沒有全面考慮被控因素之間的相互關(guān)系,缺乏專家知識的結(jié)合;故障預(yù)測沒有與自動控制有機(jī)地結(jié)合在一起,應(yīng)用的算法較為簡單,模型精度不高。
基于以上存在的問題,本研究以青島市某精細(xì)化工廠的高濃度洗滌廢水(COD≤30 000 mg/L)為研究對象,采用“自混式厭氧反應(yīng)器(SMAD)和導(dǎo)流式活性污泥反應(yīng)器(BBR)”處理工藝對該化工廠產(chǎn)生的廢水進(jìn)行處理,將人工智能技術(shù)與物聯(lián)網(wǎng)技術(shù)相結(jié)合并運(yùn)用于該化工廠智慧污水管控系統(tǒng)中。該智慧污水管控系統(tǒng)應(yīng)用深度學(xué)習(xí)中的長短期記憶(Long Short-Term Memory,LSTM)神經(jīng)網(wǎng)絡(luò)算法對設(shè)備故障進(jìn)行預(yù)測,設(shè)計并實(shí)現(xiàn)了基于強(qiáng)化學(xué)習(xí)和專家系統(tǒng)的智能運(yùn)行模塊對該污水處理裝置進(jìn)行管理。初步實(shí)驗(yàn)結(jié)果表明:該系統(tǒng)可以實(shí)現(xiàn)對小型化、分布式的智慧污水管控系統(tǒng)的智能運(yùn)行和預(yù)測性維護(hù),具有可行性且運(yùn)行穩(wěn)定。
1 系統(tǒng)設(shè)計
通過物聯(lián)網(wǎng)技術(shù),從而實(shí)現(xiàn)智慧污水管控系統(tǒng)的穩(wěn)定運(yùn)行。數(shù)據(jù)采集是物聯(lián)網(wǎng)的基礎(chǔ),傳感器技術(shù)是數(shù)據(jù)采集技術(shù)中不可缺少的一部分。本系統(tǒng)通過Modbus協(xié)議實(shí)現(xiàn)對智能設(shè)備數(shù)據(jù)的讀取。Modbus通信協(xié)議是一種工業(yè)自動化控制系統(tǒng)中的重要通信協(xié)議,通過Modbus協(xié)議對智能設(shè)備數(shù)據(jù)進(jìn)行采集匯總,從而實(shí)現(xiàn)對智能設(shè)備的遠(yuǎn)程監(jiān)控。本系統(tǒng)采用多種支持Modbus協(xié)議的智能設(shè)備,如電磁流量計、COD在線檢測儀、智能溫控傳感器、pH值在線檢測儀、PM/PM激光傳感器、溫濕度傳感器、噪聲傳感器等。其中,電磁流量計分別部署于高濃度廢水進(jìn)水、低濃度廢水進(jìn)水和經(jīng)過設(shè)備處理后的出水3個位置,可以獲取流量、流速、pH值、溫度、溶解氧(DO)、即時COD值等相關(guān)數(shù)據(jù)。現(xiàn)場采集到的數(shù)據(jù)通過4G技術(shù)的數(shù)據(jù)傳輸單元(Data Transfer Unit,DTU)傳輸至架設(shè)在互聯(lián)網(wǎng)上的智慧污水管控系統(tǒng)。該系統(tǒng)支持使用電腦和手機(jī)終端展示數(shù)據(jù),遠(yuǎn)程監(jiān)控污水處理過程,實(shí)現(xiàn)更廣泛的互聯(lián)互通。
此外,Modbus協(xié)議還支持對智能設(shè)備下達(dá)操作指令,實(shí)現(xiàn)參數(shù)修正和智能預(yù)警功能。通過實(shí)時監(jiān)測水質(zhì)質(zhì)量,從而實(shí)現(xiàn)智慧污水管控系統(tǒng)的智能化運(yùn)行。該系統(tǒng)模擬專家操作,發(fā)送遠(yuǎn)程控制指令,自動修正相關(guān)設(shè)備的運(yùn)行參數(shù),確保COD數(shù)據(jù)達(dá)到期望數(shù)值標(biāo)準(zhǔn),并且通過處理COD變化趨勢以及傳感器數(shù)據(jù),實(shí)現(xiàn)對易損設(shè)備的壽命預(yù)測和故障預(yù)警,及時發(fā)現(xiàn)異常,如COD變化趨勢不達(dá)標(biāo)或智能設(shè)備出現(xiàn)故障,方便管理人員對污水處理過程的管控。
智慧污水管控系統(tǒng)架構(gòu)如圖1所示。
智慧污水管控系統(tǒng)主要包括3個模塊,分別是遠(yuǎn)程交互模塊、智能運(yùn)行模塊和預(yù)測性維護(hù)模塊。其中,遠(yuǎn)程交互模塊可實(shí)時顯示數(shù)據(jù)以及下達(dá)操作指令,本系統(tǒng)支持查看智能設(shè)備的即時數(shù)據(jù)和過往歷史數(shù)據(jù)走勢,并且當(dāng)COD變化趨勢不達(dá)標(biāo)時,通過遠(yuǎn)程手動控制智能設(shè)備,使COD數(shù)據(jù)達(dá)到允許數(shù)值范圍之內(nèi),同時,本系統(tǒng)還支持定時拍照、設(shè)備地址查詢等功能;智能運(yùn)行模塊可通過實(shí)時監(jiān)測水質(zhì)質(zhì)量,從而實(shí)現(xiàn)智慧污水管控系統(tǒng)的智能化運(yùn)行,

圖1 智慧污水管控系統(tǒng)架構(gòu)圖Fig.1 Architecture diagram of the intelligent sewage management and control system
本系統(tǒng)可模擬專家操作,發(fā)送遠(yuǎn)程控制指令,自動修正相關(guān)設(shè)備的運(yùn)行參數(shù),確保COD數(shù)據(jù)達(dá)到期望數(shù)值標(biāo)準(zhǔn);預(yù)測性維護(hù)模塊可通過處理COD變化趨勢以及傳感器數(shù)據(jù)(如振動、噪聲等),進(jìn)而實(shí)現(xiàn)對易損設(shè)備的壽命預(yù)測和故障預(yù)警,本系統(tǒng)可及時發(fā)現(xiàn)異常,便于管理人員執(zhí)行相應(yīng)措施,例如遠(yuǎn)程手動控制智能設(shè)備以及對智能設(shè)備進(jìn)行檢修。
1.1 遠(yuǎn)程交互模塊
遠(yuǎn)程交互模塊分為PC監(jiān)控平臺和移動監(jiān)控平臺。PC監(jiān)控平臺采用B/S架構(gòu)模式,后端編程語言采用Java,數(shù)據(jù)庫使用體積小、速度快的MySQL關(guān)系型數(shù)據(jù)庫。在PC端,用戶既可以查看智能設(shè)備的即時數(shù)據(jù),也可以查看設(shè)備某一時間段內(nèi)的數(shù)據(jù)歷史記錄走勢并下載所查詢數(shù)據(jù)。除此之外,智慧污水管控系統(tǒng)支持顯示現(xiàn)場實(shí)時畫面、歷史畫面,以及監(jiān)控設(shè)備的當(dāng)前運(yùn)行情況,了解設(shè)備的過往運(yùn)行狀態(tài);設(shè)備位置查詢功能支持查看當(dāng)前設(shè)備的所在位置;且系統(tǒng)還具備故障報警通知功能,當(dāng)COD變化趨勢不達(dá)標(biāo)時,通過遠(yuǎn)程手動控制智能設(shè)備,使COD數(shù)據(jù)達(dá)到允許數(shù)值范圍之內(nèi),當(dāng)設(shè)備發(fā)生故障時,及時通知管理員和維修人員,便于管理人員對設(shè)備進(jìn)行檢查和維修。移動監(jiān)控平臺則擺脫了電腦設(shè)備攜帶不方便的困擾,通過PC端和移動監(jiān)控平臺,全方面掌握設(shè)備數(shù)據(jù)信息,進(jìn)而實(shí)現(xiàn)對污水處理過程中智能設(shè)備的遠(yuǎn)程交互。
(1)基于詞向量與深度學(xué)習(xí)的語義相似度計算模型的優(yōu)點(diǎn)是考慮到了文本中語義語法等信息,具有準(zhǔn)確率較高、泛化能力較強(qiáng)的特點(diǎn),并省去了大量的人工提取特征的工作。
遠(yuǎn)程交互模塊功能結(jié)構(gòu)見圖2。
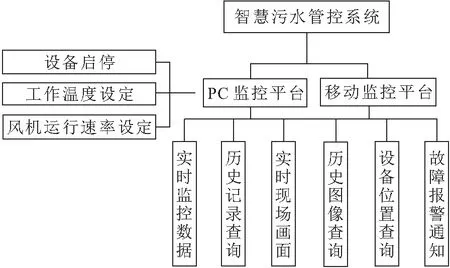
圖2 遠(yuǎn)程交互模塊功能結(jié)構(gòu)圖Fig.2 Functional structure diagram of the remote interaction module
1.2 智能運(yùn)行模塊
目前生化污水處理領(lǐng)域的系統(tǒng)運(yùn)行和維護(hù)仍然主要依靠專家經(jīng)驗(yàn),專業(yè)性較強(qiáng)且人力成本很高,無法發(fā)揮數(shù)據(jù)自身所特有的優(yōu)點(diǎn)。所以,實(shí)現(xiàn)污水處理智能化運(yùn)行成為了一個可行且有效的選擇。
智能運(yùn)行模塊的基本設(shè)計思想是通過一系列傳感器采集數(shù)據(jù),實(shí)現(xiàn)對水質(zhì)質(zhì)量的實(shí)時監(jiān)控,當(dāng)COD數(shù)據(jù)超出所期望的數(shù)值范圍,系統(tǒng)模擬專家操作,通過Modbus協(xié)議發(fā)送遠(yuǎn)程控制指令,自動修正相關(guān)設(shè)備的運(yùn)行參數(shù),從而確保COD數(shù)據(jù)達(dá)到期望數(shù)值標(biāo)準(zhǔn)。針對上述設(shè)計思想,本研究采用強(qiáng)化學(xué)習(xí)(Reinforcement Learning,RL)算法實(shí)現(xiàn)污水處理過程的智能化運(yùn)行。
強(qiáng)化學(xué)習(xí)是一種基于環(huán)境獲得獎懲從而指導(dǎo)事物的行為操作,以環(huán)境的反饋?zhàn)鳛檩斎氲臋C(jī)器學(xué)習(xí)方法。通過與環(huán)境的交互,智能體(Agent)以“試錯”的方式進(jìn)行學(xué)習(xí),利用評價性的反饋信號改進(jìn)策略,以便盡可能多地獲得來自環(huán)境的獎勵,從而獲得最優(yōu)策略以實(shí)現(xiàn)特定目標(biāo),這種方法也是自然界中人類或動物學(xué)習(xí)的基本途徑。近年來,國內(nèi)外學(xué)者針對強(qiáng)化學(xué)習(xí)在機(jī)器人、自動控制等領(lǐng)域的應(yīng)用進(jìn)行了廣泛的研究和討論,強(qiáng)化學(xué)習(xí)已成為設(shè)計智能化運(yùn)行系統(tǒng)的關(guān)鍵技術(shù)之一。
在本研究中,所設(shè)計的智能化運(yùn)行控制圖見圖3。

圖3 智能化運(yùn)行控制圖Fig.3 Schematic diagram of intelligent operation
如圖3所示,在控制器和被控設(shè)備之間既有正向控制,也有反饋控制,即系統(tǒng)的實(shí)際值對期望值會造成一定的影響。首先為系統(tǒng)設(shè)定一個期望COD值,然后將污水處理現(xiàn)場所采集的實(shí)際COD數(shù)據(jù)通過COD在線檢測儀,進(jìn)而傳輸?shù)街腔畚鬯芸叵到y(tǒng)。最后,通過強(qiáng)化學(xué)習(xí)算法,系統(tǒng)將接收到的實(shí)際COD值與已設(shè)定好的期望COD值進(jìn)行對比,產(chǎn)生一個偏差值,模擬專家操作并反饋給DTU產(chǎn)生Modbus指令作用于被控設(shè)備,自動修正相關(guān)設(shè)備的運(yùn)行參數(shù)并改變設(shè)備運(yùn)行狀態(tài)。其中,模擬的專家操作包括加熱目標(biāo)溫度、設(shè)備啟停、在線檢測設(shè)備啟動、設(shè)定風(fēng)機(jī)運(yùn)行速率等。系統(tǒng)根據(jù)潛在的獎賞函數(shù)對已執(zhí)行操作產(chǎn)生一個強(qiáng)化信號(獎勵或懲罰),通過所給予的獎勵或懲罰的刺激,系統(tǒng)利用評價性的反饋信號改進(jìn)策略,動態(tài)地調(diào)整設(shè)備運(yùn)行參數(shù),從而獲得最優(yōu)策略以實(shí)現(xiàn)特定目標(biāo),即實(shí)際COD值與期望COD值相符合。強(qiáng)化學(xué)習(xí)算法充分發(fā)揮了反饋的重要作用,使校正決策更準(zhǔn)確,從而實(shí)現(xiàn)污水處理過程的智能化運(yùn)行。
1.3 預(yù)測性維護(hù)模塊
由于不確定因素和外界的干擾,污水處理過程出現(xiàn)故障的幾率大增,可能會受天氣、進(jìn)水流量或者毒性物質(zhì)的影響,同時傳感器長時間處于酸性環(huán)境中容易被腐蝕而出現(xiàn)故障,導(dǎo)致系統(tǒng)不穩(wěn)定,從而使測量結(jié)果出現(xiàn)偏差。針對所采集數(shù)據(jù)的時效性特征,本研究采用LSTM神經(jīng)網(wǎng)絡(luò)模型進(jìn)行數(shù)據(jù)建模,研究該化工廠洗滌廢水的未來變化趨勢,從而實(shí)現(xiàn)對污水處理過程的預(yù)測性維護(hù)。
LSTM神經(jīng)網(wǎng)絡(luò)模型單元結(jié)構(gòu)見圖4。

圖4 LSTM神經(jīng)網(wǎng)絡(luò)模型單元結(jié)構(gòu)圖Fig.4 Unit structure diagram of LSTM neural network model
如圖4所示,圖中f
為遺忘門(forget gate);i
為輸入門(input gate);o
為輸出門(output gate);C
-1、C
表示t
-1、t
時刻的單元狀態(tài)。每一個LSTM 單元有3個輸入:當(dāng)前時刻的輸入X
、上一時刻的輸出h
-1和上一時刻的單元狀態(tài)C
-1;2個輸出:當(dāng)前時刻的輸出h
和單元狀態(tài)C
。LSTM單元內(nèi)部通過3個門控制單元狀態(tài),從而實(shí)現(xiàn)信息的丟棄、更新以及狀態(tài)的更新。其中W
、W
、W
、W
分別表示所對應(yīng)的權(quán)重;σ
表示sigmoid函數(shù);tanh
表示雙曲正切激活函數(shù)。在本研究中,X
代表輸入的預(yù)處理完的數(shù)據(jù)特征值,C
-1是t
-1時刻細(xì)胞記憶的COD濃度狀態(tài),h
-1是t
-1時刻COD濃度的輸出結(jié)果,將三者共同送入t
時刻的隱藏層,得到h
,h
是t
時刻COD濃度的預(yù)測結(jié)果。通過對大量的監(jiān)控數(shù)據(jù)進(jìn)行數(shù)據(jù)建模,從而實(shí)現(xiàn)對COD濃度變化趨勢的預(yù)測,可及時發(fā)現(xiàn)異常,便于管理人員執(zhí)行相應(yīng)措施,確保COD數(shù)據(jù)達(dá)到允許數(shù)值范圍之內(nèi)。此外,系統(tǒng)也支持根據(jù)傳感器數(shù)據(jù)判斷智能設(shè)備是否發(fā)生故障。例如可通過振動傳感器、噪聲傳感器、電流電壓傳感器、液位傳感器等設(shè)備數(shù)據(jù)對風(fēng)機(jī)、水泵等一些易損設(shè)備進(jìn)行壽命預(yù)測,判斷該設(shè)備是否即將達(dá)到閾值或出現(xiàn)損壞、堵塞等問題,以便及時通知管理人員和維修人員對該設(shè)備進(jìn)行檢查和維修。通過對污水處理過程的預(yù)測性維護(hù),可方便管理人員對污水處理過程的管控,以有效降低安全風(fēng)險。
2 應(yīng)用分析
在遠(yuǎn)程交互模塊,通過實(shí)時采集污水處理現(xiàn)場的數(shù)據(jù),確保智能設(shè)備運(yùn)行穩(wěn)定。在本系統(tǒng)中,用戶既可以查看智能設(shè)備的即時數(shù)據(jù),以及某一時間段內(nèi)的數(shù)據(jù)歷史記錄走勢,也可以下載所查詢數(shù)據(jù),進(jìn)而為智慧污水管控系統(tǒng)的智能化運(yùn)行和預(yù)測性維護(hù)奠定基礎(chǔ)。
該系統(tǒng)已在青島某精細(xì)化工廠建成并投入使用且穩(wěn)定運(yùn)行一年左右,所采集數(shù)據(jù)全部保存在數(shù)據(jù)庫中。以進(jìn)水電磁流量計中的進(jìn)水溫度為例查詢歷史記錄,查詢時間區(qū)間為2020年1月1日至2020年1月31日,其顯示界面見圖5。
首先,通過物聯(lián)網(wǎng)技術(shù),實(shí)現(xiàn)對智能設(shè)備數(shù)據(jù)信息的采集,其中進(jìn)水量分成兩種,分別為高濃度進(jìn)水量和低濃度進(jìn)水量。在本研究中,共獲取到了7個時序數(shù)據(jù)特征,分別是COD濃度、罐內(nèi)溫度、出水溫度、進(jìn)水溫度、低濃度進(jìn)水量、高濃排溫度以及高濃度進(jìn)水量,其中進(jìn)水量的值指過去48 h的累計數(shù)據(jù)值,數(shù)據(jù)詳情見表1。

圖5 查詢的進(jìn)水溫度歷史記錄Fig.5 Interface of query of inflow temperature historical records
然后,采用LSTM神經(jīng)網(wǎng)絡(luò)模型進(jìn)行數(shù)據(jù)建模,用大量已有數(shù)據(jù)訓(xùn)練LSTM神經(jīng)網(wǎng)絡(luò)模型,讓其充分學(xué)習(xí),進(jìn)行有效的趨勢預(yù)測,從而實(shí)現(xiàn)對污水處理過程的預(yù)測性維護(hù)。將現(xiàn)場采集的數(shù)據(jù)進(jìn)行標(biāo)準(zhǔn)化預(yù)處理,將所有的數(shù)據(jù)值變?yōu)?到1區(qū)間段,以適合數(shù)據(jù)模型的輸入形式;然后將數(shù)據(jù)分為訓(xùn)練集和測試集,用測試集來測試數(shù)據(jù)模型的優(yōu)化程度。本研究中所采用的數(shù)據(jù)集共37 d,日期是從2019年4月9日至2019年5月15日,其中90%作為訓(xùn)練集,10%作為測試集。選取罐內(nèi)溫度、出水溫度、進(jìn)水溫度、低濃度進(jìn)水量、高濃排溫度、高濃度進(jìn)水量為輸入層,COD濃度為輸出層,采用3層的LSTM神經(jīng)網(wǎng)絡(luò)模型,并進(jìn)行模型的訓(xùn)練與預(yù)測。

表1 數(shù)據(jù)詳情
圖6為LSTM神經(jīng)網(wǎng)絡(luò)模型訓(xùn)練結(jié)果圖,其中橫坐標(biāo)表示訓(xùn)練模型所得出的COD濃度值,縱坐標(biāo)表示實(shí)際COD濃度值。由圖6可見,利用已有數(shù)據(jù)訓(xùn)練LSTM神經(jīng)網(wǎng)絡(luò)模型,經(jīng)過訓(xùn)練后,模型的擬合性較好,具有較高的準(zhǔn)確性,對COD≤1 000 mg/L的數(shù)據(jù),該模型的預(yù)測效果尤為顯著,表明該模型適合進(jìn)行時序序列的預(yù)測。

圖6 LSTM神經(jīng)網(wǎng)絡(luò)模型訓(xùn)練結(jié)果圖Fig.6 Training result of LSTM neural netwrok model
圖7為LSTM神經(jīng)網(wǎng)絡(luò)模型預(yù)測結(jié)果圖,橫坐標(biāo)表示LSTM神經(jīng)網(wǎng)絡(luò)模型所預(yù)測的COD濃度值,縱坐標(biāo)表示實(shí)際COD濃度值。由圖7可見,預(yù)測模型能夠較好地擬合出COD濃度的變化趨勢,即說明LSTM神經(jīng)網(wǎng)絡(luò)模型能夠較為準(zhǔn)確地預(yù)測COD濃度的變化趨勢。因此,LSTM神經(jīng)網(wǎng)絡(luò)算法可作為智慧污水管控系統(tǒng)中預(yù)測性維護(hù)模塊的算法支撐,為該化工廠安全管理人員提供技術(shù)支持,方便管理人員對污水處理過程的管控。
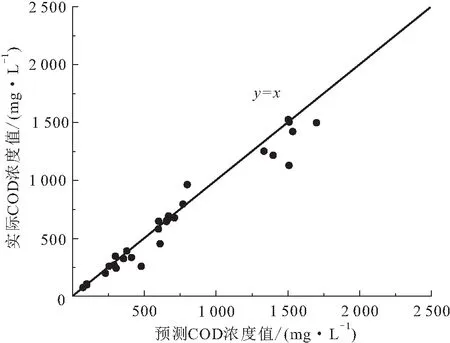
圖7 LSTM神經(jīng)網(wǎng)絡(luò)模型預(yù)測結(jié)果圖Fig.7 Predicted result of LSTM neural netwrok model
3 結(jié)論與建議
本研究以青島市某精細(xì)化工廠為例,將人工智能技術(shù)與物聯(lián)網(wǎng)技術(shù)相結(jié)合并運(yùn)用于該化工廠智慧污水管控系統(tǒng)中,通過一系列傳感器采集數(shù)據(jù),實(shí)現(xiàn)對水質(zhì)質(zhì)量的實(shí)時監(jiān)測。該智慧污水管控系統(tǒng)主要包括3個模塊,分別是遠(yuǎn)程交互模塊、智能運(yùn)行模塊和預(yù)測性維護(hù)模塊。智慧污水管控系統(tǒng)中遠(yuǎn)程交互模塊可實(shí)時顯示從污水處理現(xiàn)場采集的數(shù)據(jù)并可以遠(yuǎn)程手動控制智能設(shè)備;深度學(xué)習(xí)中的LSTM神經(jīng)網(wǎng)絡(luò)算法可作為智慧污水管控系統(tǒng)中預(yù)測性模塊的算法支撐,可較為準(zhǔn)確地預(yù)測COD濃度的變化趨勢,從而實(shí)現(xiàn)對污水處理過程的預(yù)測性維護(hù);基于強(qiáng)化學(xué)習(xí)和專家系統(tǒng)的智能運(yùn)行模塊可對該污水處理裝置進(jìn)行管理。初步實(shí)驗(yàn)結(jié)果表明:該系統(tǒng)可以實(shí)現(xiàn)對小型化、分布式的智慧污水管控系統(tǒng)的智能運(yùn)行和預(yù)測性維護(hù),具有可行性且運(yùn)行穩(wěn)定。
由于本項(xiàng)目當(dāng)前仍處于初期運(yùn)行階段,數(shù)據(jù)的收集和建模仍在進(jìn)行中,因此本研究將會持續(xù)收集數(shù)據(jù),繼續(xù)改進(jìn)和優(yōu)化算法,從而獲得更為準(zhǔn)確的決策。此外,針對所使用的移動通訊設(shè)備,本研究后期會將通訊技術(shù)由4G提升為5G,使其速度更快、延遲更低,通過這些改進(jìn),以確保智慧污水管控系統(tǒng)的長期穩(wěn)定運(yùn)行。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
消費(fèi)者報道(2014年7期)2014-07-31 11:23:57
小天使·一年級語數(shù)英綜合(2014年6期)2014-07-22 23:32:38
智慧與創(chuàng)想(2013年7期)2013-11-18 08:06:04
