基于FRAM-FAHP法的船舶碰撞事故致因分析
2021-03-11 03:06:12張靖雯馬曉雪喬衛(wèi)亮
安全與環(huán)境工程 2021年1期
張靖雯,馬曉雪,劉 陽,喬衛(wèi)亮
(1.大連海事大學(xué)公共管理與人文藝術(shù)學(xué)院,遼寧 大連 116026;2.大連海事大學(xué)輪機(jī)工程學(xué)院,遼寧 大連 116026)
事故致因分析模型的建立是風(fēng)險(xiǎn)評(píng)估的重要步驟,同時(shí)也是分析者能否找到導(dǎo)致事故根本原因進(jìn)而預(yù)防和改善系統(tǒng)安全性的關(guān)鍵因素。有學(xué)者根據(jù)船-環(huán)境等因素建立了船舶碰撞事故風(fēng)險(xiǎn)分析模型,利用BP神經(jīng)網(wǎng)絡(luò)得到碰撞危險(xiǎn)度和環(huán)境危險(xiǎn)度,并根據(jù)實(shí)際情況給出了船舶航行安全提示和建議。故障樹分析方法是將頂層事件視為嚴(yán)重的事故,底層事件視為導(dǎo)致嚴(yán)重事故的最初始的原因。有學(xué)者采用該方法建立了客滾船碰撞事故致因分析模型,用來衡量各事件對(duì)導(dǎo)致最終客滾船碰撞事故發(fā)生的影響程度,得到了危險(xiǎn)事件序列并初步給出了風(fēng)險(xiǎn)控制措施。這些方法往往是從影響因素的角度分解系統(tǒng),而功能共振分析方法(FRAM)能夠從功能的角度分析事故機(jī)理,建立事故功能共振分析模型。該方法強(qiáng)調(diào)從日常活動(dòng)中找到提高系統(tǒng)安全性的有效措施,強(qiáng)調(diào)系統(tǒng)的動(dòng)態(tài)性和非線性特征,并通過分析系統(tǒng)中各功能模塊的緊密耦合來揭示事故機(jī)理。
傳統(tǒng)的功能共振分析方法只能進(jìn)行定性分析,有學(xué)者嘗試對(duì)傳統(tǒng)的功能共振分析方法進(jìn)行量化改進(jìn)。利用蒙特卡洛模擬建立了半定量的功能共振分析模型,量化分析了各個(gè)功能的可變性。如Rosa等利用層次分析法改進(jìn)了功能共振分析模型,通過分別量化上、下游功能的可變性來評(píng)估建筑活動(dòng)中的風(fēng)險(xiǎn);也有學(xué)者利用FRAM-AHP法來分析航空事故的主要原因。然而,學(xué)者們更多的是對(duì)于功能的可變性進(jìn)行了量化,對(duì)于功能變化的耦合作用仍然采取定性分析的方式。為了降低功能變化耦合分析中的主觀性,使得評(píng)估結(jié)果更加貼近實(shí)際情況,本文采用模糊層次分析(FAHP)方法對(duì)功能變化的耦合作用進(jìn)行定量分析,以明確系統(tǒng)運(yùn)行過程中的擾動(dòng)與機(jī)遇,既提前預(yù)防擾動(dòng),又主動(dòng)抓住機(jī)遇,從而提高系統(tǒng)的安全性。為此,本文針對(duì)船舶碰撞事故,建立了功能共振分析方法(FRAM)與模糊層次分析(FAHP)方法相結(jié)合的事故致因分析模型(即FRAM-FAHP法),并利用FRAM-FAHP法分析了某船舶碰撞事故的致因,確定了影響船舶系統(tǒng)安全性的主要失效鏈接,為降低船舶碰撞風(fēng)險(xiǎn)提供依據(jù)。
1 功能共振分析方法原理[6]
功能共振分析方法(Functional Resonance Analysis Method,FRAM)基于以下4項(xiàng)原理所建立:失敗和成功同源,即事物運(yùn)行正確與否均由相同原因引起;在社會(huì)-技術(shù)系統(tǒng)的日常活動(dòng)中,個(gè)人或群體可以通過微弱的行為變化來適應(yīng)當(dāng)前環(huán)境;許多事物都是涌現(xiàn)的結(jié)果;功能共振分析的重點(diǎn)在于功能間的耦合與關(guān)聯(lián)。功能共振分析方法重在關(guān)注日常活動(dòng)本質(zhì),并不局限于研究可能出錯(cuò)的情況,擅長從成功事件中學(xué)習(xí)。
功能共振是指某一要素在許多其他要素日常變化的無意識(shí)相互作用下產(chǎn)生的可以觀察到的突變現(xiàn)象。隨著現(xiàn)代工業(yè)系統(tǒng)規(guī)模的日益擴(kuò)大,系統(tǒng)變得日益復(fù)雜,往往包含許多子系統(tǒng)以及諸多要素。在這些復(fù)雜的系統(tǒng)內(nèi),人員、技術(shù)以及組織等要素均存在一個(gè)正常的變化范圍。對(duì)于某一要素來講,其他要素可以當(dāng)作是這一要素的運(yùn)行環(huán)境。當(dāng)某一要素產(chǎn)生正常變化時(shí),只會(huì)釋放出一種很微弱的信號(hào),這種信號(hào)往往不會(huì)被察覺。然而,運(yùn)行環(huán)境的變化反映的是其他各要素變化的聚合效應(yīng),呈現(xiàn)一種無規(guī)則狀態(tài)。當(dāng)這種無規(guī)則的聚合效應(yīng)與某要素正常變化發(fā)生耦合作用時(shí),就有可能引起功能共振,使得這一要素超出正常的變化范圍,得不到有效控制,從而導(dǎo)致事故的發(fā)生。
功能共振往往會(huì)導(dǎo)致瞬時(shí)發(fā)生或涌現(xiàn)的結(jié)果,可以用來解釋一些復(fù)雜社會(huì)-技術(shù)系統(tǒng)中如何發(fā)生不期望的結(jié)果。通過功能共振分析方法來解釋日常行為變化如何造成不期望結(jié)果的發(fā)生,重點(diǎn)關(guān)注由個(gè)人、團(tuán)隊(duì)組織或決策認(rèn)知系統(tǒng)所實(shí)現(xiàn)的功能。基于人員以及組織的近似調(diào)整,人們可以對(duì)系統(tǒng)進(jìn)行預(yù)測(cè)與控制。
功能共振分析方法認(rèn)為,事物運(yùn)行狀態(tài)正確與否都可由相同活動(dòng)所導(dǎo)致。因此,通過功能共振方法分析事故時(shí),不論是分析已經(jīng)發(fā)生的事件還是可能發(fā)生的事件,都要研究系統(tǒng)的日常活動(dòng),于日常活動(dòng)中識(shí)別出對(duì)應(yīng)的功能與聯(lián)系,從而構(gòu)建功能共振分析模型。然而,由于聚合效應(yīng),難以預(yù)料功能模塊間的作用與聯(lián)系。因此,可以引入模糊層次分析法來量化分析功能變化的耦合情況。
模糊層次分析方法(Fuzzy Analytic Hierarchy Process,FAHP)可以解決指標(biāo)的不確定性、多層性和模糊性等問題,能更好地解析和量化各功能模塊間的作用與聯(lián)系,且操作簡便。功能共振分析方法與模糊層次分析方法具有一定的契合性:功能共振分析方法的模型涉及多個(gè)層級(jí),分析者可以從操作角度出發(fā)自下而上來描述系統(tǒng)事故的過程,即根據(jù)各功能模塊行為變化的表現(xiàn)(表型)來分析事故的過程,模糊層次分析方法恰好滿足多層級(jí)分析的要求;同時(shí),功能模塊行為變化所引起的聚合效應(yīng)具有不確定性,利用模糊層次分析方法可以量化分析功能變化的耦合情況,為功能變化的聚合效應(yīng)提供客觀依據(jù),減少定性分析的不確定性。
2 利用FRAM-FAHP法分析事故的過程
2.1 識(shí)別并描述系統(tǒng)功能模塊
功能是指為了產(chǎn)生某種輸出而采取的活動(dòng),在利用功能共振分析方法分析船舶碰撞事故時(shí),會(huì)涉及一系列與船舶航行有關(guān)的事件,將每一個(gè)與船舶航行有關(guān)的事件視為一個(gè)功能模塊,如圖1所示,并且每個(gè)功能模塊都要從六個(gè)方面進(jìn)行描述:輸入(I)、輸出(O)、資源(R)、控制(C)、前提(P)和時(shí)間(T)。通常來講,會(huì)把輸入、控制、資源、前提和時(shí)間視為輸入端。

圖1 功能的六角形模塊Fig.1 Hexagonal module of function
各個(gè)功能模塊間輸入端與輸出端相連,以此建立起系統(tǒng)功能網(wǎng)絡(luò),解釋事件的正常運(yùn)行過程。上、下游功能是一種相對(duì)說法,同一功能可能時(shí)而被描述為上游功能,時(shí)而被描述為下游功能。系統(tǒng)中功能發(fā)生波動(dòng)往往是上、下游功能耦合的結(jié)果,上游功能的輸出端發(fā)生變化可能會(huì)影響下游功能的輸入端,導(dǎo)致下游功能發(fā)生波動(dòng)。
2.2 分析功能模塊上下游耦合的情況
功能變化是功能模塊上、下游耦合的結(jié)果,上游功能的輸出(同時(shí)作為下游功能的輸入端)可能會(huì)發(fā)生變化并且影響下游功能的變化。為了明確功能模塊上、下游耦合的具體情況,需要確定當(dāng)上游功能輸出發(fā)生變化時(shí),下游功能會(huì)相應(yīng)地發(fā)生何種變化,以及下游功能的輸出發(fā)生何種變化。
判斷上游功能輸出變化情況,可以利用故障模式的概念來定義表型變化,本文從4種角度來定義表型變化,分別是力量/距離/方向、時(shí)機(jī)/持續(xù)時(shí)間、順序、目標(biāo)。力量可能變化為太弱、太強(qiáng)或正常,如船舶的動(dòng)力;距離可能變化為過短、過長或正常,如兩船間的安全距離;方向可能變化為方向錯(cuò)誤、運(yùn)動(dòng)方式錯(cuò)誤或正常,如船舶航行的方向;時(shí)機(jī)/持續(xù)時(shí)間可能變化為太早、太晚、遺漏或正常,如避讓措施開始的時(shí)間;順序可能變化為遺漏、跳躍、重復(fù)、反轉(zhuǎn)等,如航行前捕捉天氣水文信息;目標(biāo)可能變化為與目標(biāo)物體相似、與目標(biāo)物體臨近、與目標(biāo)物體無關(guān)或正常,如判斷存在碰撞風(fēng)險(xiǎn)的對(duì)象船舶。
判斷上游功能輸出發(fā)生變化時(shí)的下游功能變化情況,表型變化包括下游功能輸入端的輸入、控制、時(shí)間、資源和前提五個(gè)方面。
2.3 評(píng)價(jià)功能變化的風(fēng)險(xiǎn)水平
2.3.1 評(píng)價(jià)流程
功能變化的風(fēng)險(xiǎn)水平評(píng)價(jià)流程為:首先,根據(jù)功能共振分析方法中功能模塊的特點(diǎn)來構(gòu)建層次結(jié)構(gòu);然后,利用評(píng)分方法分別計(jì)算影響每個(gè)上游功能輸出變化的4個(gè)表型和影響每個(gè)下游功能輸入變化的5個(gè)表型的權(quán)重,打分標(biāo)準(zhǔn)采用0.1~0.9標(biāo)度法,計(jì)算表型權(quán)重,得到每個(gè)主要表型變化的相對(duì)權(quán)重;最后,建立準(zhǔn)則層要素的評(píng)判準(zhǔn)則,通過模糊綜合計(jì)算,分別得到每個(gè)上游功能輸出變化和每個(gè)下游功能輸入變化的風(fēng)險(xiǎn)水平。各個(gè)功能輸出或輸入變化的風(fēng)險(xiǎn)水平評(píng)價(jià)流程圖,見圖2。

圖2 各個(gè)功能輸出或輸入變化的風(fēng)險(xiǎn)水平評(píng)價(jià)流程圖Fig.2 Flow-process diagram of risk level evaluation for changes in output or input of each function
2.3.2 具體步驟
功能變化的風(fēng)險(xiǎn)水平評(píng)價(jià)具體步驟如下:
第一步:建立基于模糊層次分析法的結(jié)構(gòu)分析模型,利用評(píng)分方法構(gòu)建模糊互補(bǔ)判斷矩陣。分別對(duì)準(zhǔn)則層指標(biāo)的相對(duì)重要性進(jìn)行兩兩比較,得到準(zhǔn)則層對(duì)目標(biāo)層的模糊互補(bǔ)判斷矩陣=(b
)×,其中b
+b
=1,以某個(gè)上游功能模塊為例,構(gòu)建上游與下游功能變化的模糊互補(bǔ)判斷矩陣,見表1。
表1 某個(gè)上游功能模塊輸出表型變化的打分
第二步:計(jì)算表型相對(duì)重要性權(quán)重。在模糊互補(bǔ)判斷矩陣中,表型相對(duì)重要性權(quán)重向量為=(W
,W
,…,W
),其中向量W
需要滿足: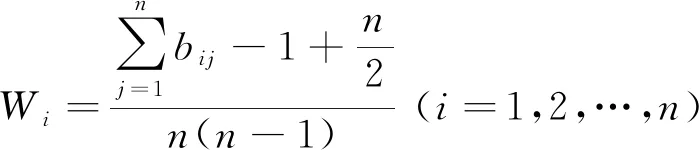
(1)

W
)×,其中W
需要滿足:
(2)
對(duì)模糊互補(bǔ)判斷矩陣進(jìn)行一致性檢驗(yàn)時(shí),需要選用模糊互補(bǔ)判斷矩陣與其特征矩陣的相容性指標(biāo)來判斷其一致性。對(duì)模糊互補(bǔ)判斷矩陣進(jìn)行一致性檢驗(yàn)的標(biāo)準(zhǔn)為
(3)
其中,α
一般取值為0.1。經(jīng)過計(jì)算,當(dāng)I
(,)≤0.1時(shí),表明該模糊互補(bǔ)判斷矩陣的一致性可接受。第四步:確定風(fēng)險(xiǎn)等級(jí)標(biāo)準(zhǔn)。為了進(jìn)一步明確各個(gè)表型對(duì)某功能輸入或輸出變化產(chǎn)生的影響,需要對(duì)各表型代表的實(shí)際變化所產(chǎn)生的風(fēng)險(xiǎn)進(jìn)行估值。主要從兩個(gè)方面對(duì)風(fēng)險(xiǎn)進(jìn)行估值,定義表型變化的風(fēng)險(xiǎn)影響后果有輕微、中等、嚴(yán)重、重大和災(zāi)難性,分別賦予1~5的分值;定義表型變化的風(fēng)險(xiǎn)發(fā)生概率也分為5種情況,分別是罕見的、偶爾的、可能的、預(yù)期的和頻繁的,也是分別賦予1~5的分值。
表型變化的風(fēng)險(xiǎn)影響后果和風(fēng)險(xiǎn)發(fā)生頻率共同決定影響該功能輸出或輸入變化的風(fēng)險(xiǎn)水平,本文將風(fēng)險(xiǎn)水平劃分為5個(gè)等級(jí),分別為極低風(fēng)險(xiǎn)、低風(fēng)險(xiǎn)、中等風(fēng)險(xiǎn)、高風(fēng)險(xiǎn)、極高風(fēng)險(xiǎn)。功能模塊表型變化的風(fēng)險(xiǎn)影響后果和風(fēng)險(xiǎn)發(fā)生頻率的評(píng)分結(jié)果,見表2。
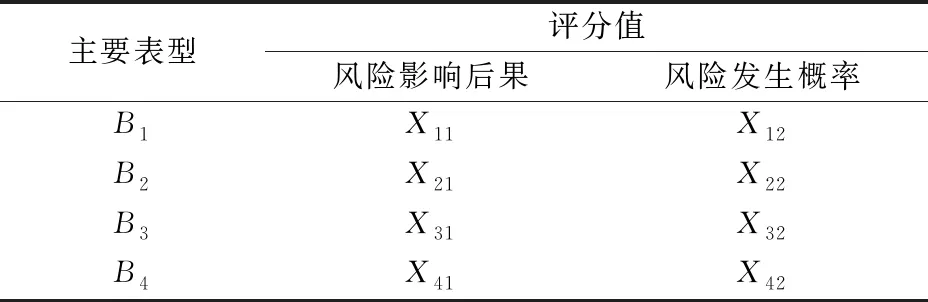
表2 功能模塊表型變化的風(fēng)險(xiǎn)水平評(píng)分值
然后將兩種分值的乘積(即x
1×x
2)代入梯形分布的隸屬函數(shù)r
(x
),隸屬函數(shù)表示如下:


(4)


r
)×5,將風(fēng)險(xiǎn)水平評(píng)分結(jié)果的分?jǐn)?shù)值代入公式(4)進(jìn)行計(jì)算,得到反映4個(gè)表型變化的風(fēng)險(xiǎn)水平等級(jí)的模糊關(guān)系矩陣。第五步:模糊合成運(yùn)算。將表型權(quán)重向量與準(zhǔn)則層模糊關(guān)系矩陣進(jìn)行模糊合成運(yùn)算,得到綜合評(píng)價(jià)等級(jí):=°=[s
,s
,…,s
](5)
式中:為綜合評(píng)價(jià)等級(jí)集;“°”為模糊矩陣合成算子符號(hào),采用M
(∧,?)進(jìn)行模糊合成運(yùn)算,可表示為
(6)
第六步:計(jì)算相對(duì)風(fēng)險(xiǎn)系數(shù)。將極低風(fēng)險(xiǎn)、低風(fēng)險(xiǎn)、中等風(fēng)險(xiǎn)、高風(fēng)險(xiǎn)、極高風(fēng)險(xiǎn)的標(biāo)準(zhǔn)值分別設(shè)定為0.1、0.3、0.5、0.7、0.9,得到=(0.1,0.3,0.5,0.7,0.9)。相對(duì)風(fēng)險(xiǎn)系數(shù)表示為s
=·(7)
經(jīng)過公式(1)~(7)計(jì)算,可以得到各功能模塊變化的相對(duì)風(fēng)險(xiǎn)系數(shù)。
2.4 確定事故的主要影響因素
通過以上FRAM-FAHP法分析過程,量化得到每個(gè)上、下游功能模塊變化的相對(duì)風(fēng)險(xiǎn)系數(shù),然后根據(jù)功能共振分析模型中上、下游功能間的關(guān)系,可得到功能共振分析模型中每條鏈接的相對(duì)風(fēng)險(xiǎn)系數(shù)。鏈接的相對(duì)風(fēng)險(xiǎn)系數(shù)越高,則說明該鏈接對(duì)系統(tǒng)運(yùn)行的影響程度越大,并通過可能出現(xiàn)的失效鏈接來確定事故的主要影響因素。同時(shí),根據(jù)功能共振分析方法的成敗等價(jià)原則,關(guān)注功能變化的耦合作用,通過近似調(diào)整系統(tǒng)運(yùn)行中的影響因素來規(guī)避系統(tǒng)風(fēng)險(xiǎn),提高系統(tǒng)的安全性。
3 船舶碰撞事故案例分析
3.1 船舶碰撞事故描述
C輪從上海吳淞口錨地起錨續(xù)航進(jìn)入黃浦江,在駛往黃浦江過程中,與正在錨泊的X輪相撞,造成重大等級(jí)水上交通事故。事故經(jīng)過如下:約23∶15時(shí),C輪開始起錨,23∶25時(shí),C輪起錨完畢,準(zhǔn)備駛往黃浦江,約23∶28時(shí),值班水手發(fā)現(xiàn)船位偏移并報(bào)告船長,船長發(fā)現(xiàn)碰撞風(fēng)險(xiǎn),并立即控制船舶采取避讓措施,23∶29時(shí)45秒時(shí),C輪與X輪發(fā)生碰撞事故。
3.2 基于FRAM-FAHP法的船舶碰撞事故致因分析
3.2.1 建立船舶碰撞事故功能共振分析模型
本文著重研究船舶航行過程中的避讓活動(dòng),由于X輪處于靜止?fàn)顟B(tài),因此只對(duì)C輪駛離錨地航行的正常過程進(jìn)行功能模塊劃分,主要包括以下幾個(gè)功能模塊:準(zhǔn)備啟航F1、航行F2、捕捉天氣水文信息F3、發(fā)現(xiàn)碰撞風(fēng)險(xiǎn)F4、操縱F5、外部交流F6、水手瞭望F7、內(nèi)部合作F8、避讓F9、主管監(jiān)管F10、X輪避讓F11。以上是C輪準(zhǔn)備離開錨地,并且積極避讓錨地內(nèi)其他船只的正常過程,總結(jié)提取此過程中的11件事件,將其定義為11個(gè)功能模塊,從六個(gè)方面描述每個(gè)功能模塊的具體內(nèi)容。以功能模塊“航行”為例,航行功能的具體內(nèi)容見表3。根據(jù)各個(gè)功能模塊的具體內(nèi)容以及功能模塊間的相互聯(lián)系,連接各個(gè)功能模塊,形成如圖3所示的系統(tǒng)功能共振分析模型。

表3 功能模塊“航行”的具體內(nèi)容
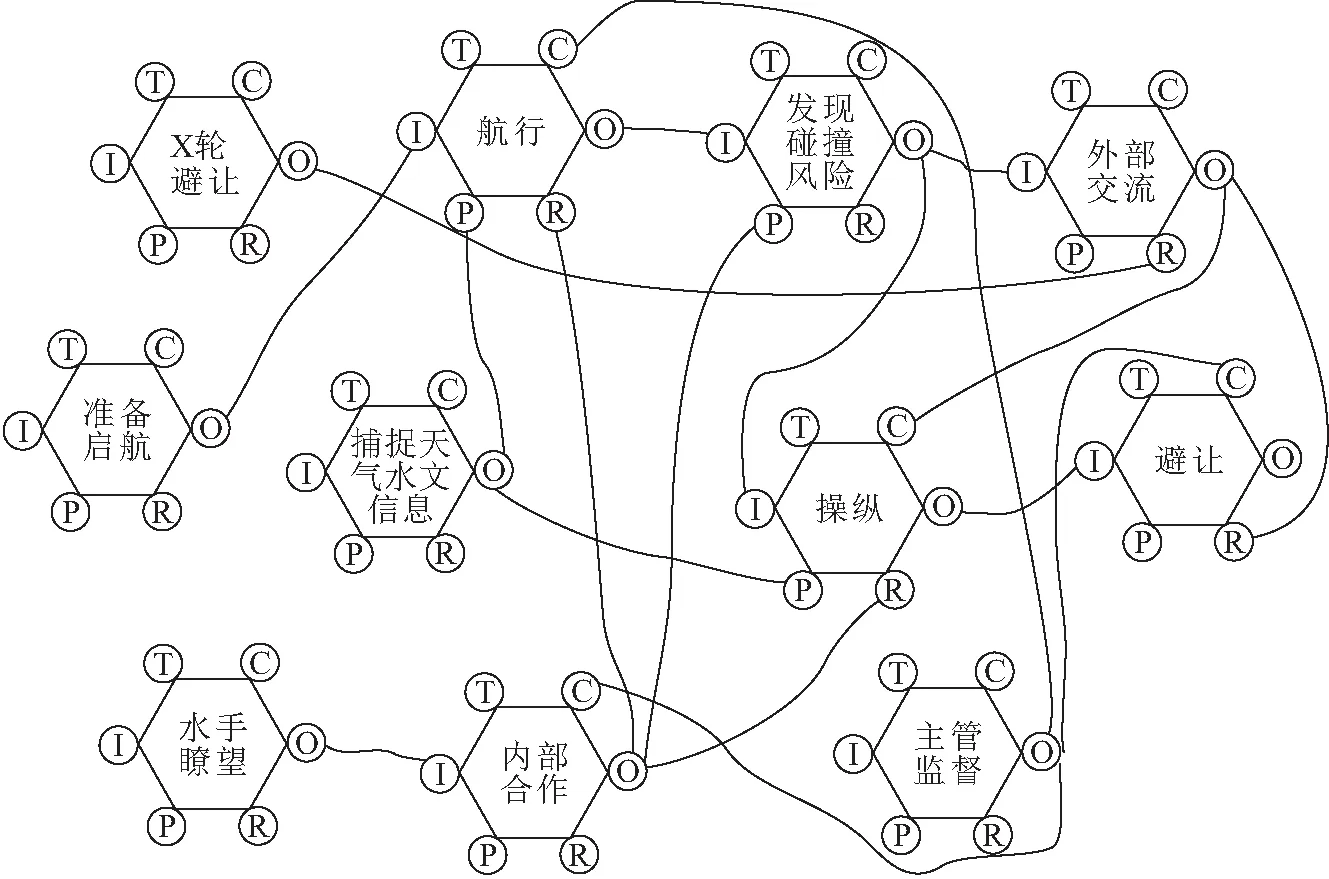
圖3 船舶碰撞事故案例的功能共振分析模型Fig.3 FRAM model for the case of a ship collision accident
3.2.2 分析船舶碰撞事故功能模塊上下游耦合的情況
判斷功能模塊上、下游耦合時(shí),重點(diǎn)在于對(duì)每個(gè)功能模塊的表型變化展開分析。根據(jù)上文事故過程的描述可知,可以確定功能模塊“避讓”是船舶系統(tǒng)中的失效功能,即最終結(jié)果是C輪避讓失敗,與其他船只相撞。因此,應(yīng)該先從該功能模塊進(jìn)行分析,進(jìn)而識(shí)別出導(dǎo)致船舶碰撞事故發(fā)生的主要鏈接。與功能模塊“避讓”輸入端相連的功能模塊包括“操縱”、“外部交流”和“主管監(jiān)督”,本文以功能模塊“操縱”為例對(duì)其表型變化進(jìn)行分析。
3.2.3 評(píng)價(jià)船舶碰撞事故各功能變化的風(fēng)險(xiǎn)水平
從功能共振分析方法原理的特點(diǎn)出發(fā),將功能模塊的輸出或輸入變化情況看作目標(biāo)層,將功能模塊輸出或輸入變化情況的4個(gè)主要表型看作準(zhǔn)則層,得到功能模塊“操縱”輸出可變性的層次結(jié)構(gòu),見圖4。

圖4 功能模塊“操縱”輸出可變性的層次結(jié)構(gòu)圖Fig.4 AHP hierarchical structure for the output varia- bility of function module “manipulation”
功能模塊表型變化分析過程中,需要進(jìn)行兩次評(píng)分步驟:第一次,在構(gòu)造上游與下游功能變化的模糊互補(bǔ)判斷矩陣時(shí),針對(duì)比較系數(shù)的選取,本文主要參考了量化分析船舶碰撞事故的文獻(xiàn),并以問卷形式咨詢專家意見;第二次,在判斷風(fēng)險(xiǎn)水平時(shí),考慮到風(fēng)險(xiǎn)水平屬于定性風(fēng)險(xiǎn),為保證結(jié)果具有一定的可參考性,在對(duì)風(fēng)險(xiǎn)影響后果和風(fēng)險(xiǎn)發(fā)生概率進(jìn)行評(píng)分時(shí),參考交通運(yùn)輸部海事局官網(wǎng)收錄的2014—2019年間的事故通告內(nèi)容,經(jīng)過篩選,獲得發(fā)生在上海海事局轄區(qū)范圍內(nèi)的船舶碰撞相關(guān)事故通告共28起;同時(shí)參考了分析船舶碰撞事故影響因素的文獻(xiàn),并以問卷形式咨詢了專家意見。以功能模塊“操縱”為例,其輸出表型變化的風(fēng)險(xiǎn)水平評(píng)分結(jié)果見表4。

表4 功能模塊“操縱”輸出表型變化的風(fēng)險(xiǎn)水平評(píng)分值
最后采用公式(1)~(7)計(jì)算其他上、下游功能變化的風(fēng)險(xiǎn)系數(shù),其中上游功能輸出端變化的相對(duì)風(fēng)險(xiǎn)系數(shù)見表5,下游功能輸入端變化的相對(duì)風(fēng)險(xiǎn)系數(shù)見表6。

表5 上游功能輸出端變化的相對(duì)風(fēng)險(xiǎn)系數(shù)
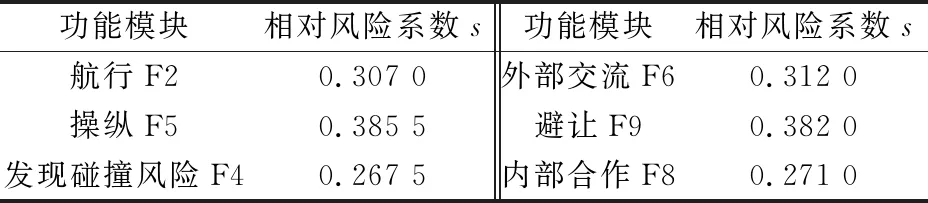
表6 下游功能輸入端變化的相對(duì)風(fēng)險(xiǎn)系數(shù)
3.2.4 確定船舶碰撞事故的主要影響因素
通過以上FRAM-FAHP法分析,可得到每個(gè)上、下游功能模塊的風(fēng)險(xiǎn)系數(shù),表5代表上游功能的可變性,表6代表下游功能的可變性;再根據(jù)功能共振分析模型的連線(見圖3),將相連的上游功能與下游功能的相對(duì)風(fēng)險(xiǎn)系數(shù)相加,可得到不同連接路徑的相對(duì)風(fēng)險(xiǎn)值(見表7),該相對(duì)風(fēng)險(xiǎn)值代表其中兩個(gè)功能模塊發(fā)生耦合作用可能會(huì)產(chǎn)生的風(fēng)險(xiǎn)影響。

表7 功能共振分析模型中各鏈接的相對(duì)風(fēng)險(xiǎn)值
由表7可知,在案例圖的17條鏈接中,有4條鏈接的相對(duì)風(fēng)險(xiǎn)值較高,當(dāng)這些鏈接失效時(shí),更容易導(dǎo)致船舶碰撞事故的發(fā)生。鏈接失效可能存在以下表現(xiàn):第一,在F4(O)-F5(I)路徑中,船舶采取消極反應(yīng),未主動(dòng)完成瞭望任務(wù),默認(rèn)航行方向無偏差,出現(xiàn)碰撞危機(jī)時(shí)才意識(shí)到偏離安全航線;第二,在F10(O)-F9(C)路徑中,船長作為監(jiān)督人員,缺乏對(duì)全局的監(jiān)督與控制,未及時(shí)發(fā)現(xiàn)其他船員的失誤行為,未意識(shí)到存在瞭望疏忽,未及時(shí)發(fā)現(xiàn)船舶偏離安全航線;第三,在F5(O)-F9(I)路徑中,船長或值班船員未妥善應(yīng)對(duì)船位漂移,未及時(shí)采取適當(dāng)控制行動(dòng)來切斷事故鏈;第四,在F4(O)-F6(I)路徑中,船舶在開始航行時(shí)未及時(shí)有效提醒對(duì)方船只,當(dāng)發(fā)現(xiàn)與對(duì)方船只存在碰撞風(fēng)險(xiǎn)時(shí),也未開展有效溝通。
根據(jù)功能共振分析方法的成敗等價(jià)原則,該方法既可以分析導(dǎo)致事故發(fā)生的消極因素,同時(shí)也能夠發(fā)現(xiàn)可以避免事故發(fā)生的積極因素,并通過近似調(diào)整系統(tǒng)運(yùn)行中的積極因素來規(guī)避風(fēng)險(xiǎn),促進(jìn)系統(tǒng)平穩(wěn)運(yùn)行。
以F4(O)-F5(I)路徑為例,作為相對(duì)風(fēng)險(xiǎn)值最高的一條路徑,該路徑對(duì)船舶系統(tǒng)安全的影響力是最大的,F(xiàn)4的輸出端和F5的輸入端一旦發(fā)生微弱變化,將更容易導(dǎo)致船舶系統(tǒng)發(fā)生顯著變化。因此,對(duì)F4的輸出端和F5的輸入端進(jìn)行控制,既可以避免船舶碰撞事故的發(fā)生,又能促進(jìn)船舶系統(tǒng)平穩(wěn)運(yùn)行。在建立船舶碰撞事故功能共振分析模型時(shí),已知F4的輸出端的特征描述為“C輪值班水手發(fā)現(xiàn)本船可能與X輪存在碰撞風(fēng)險(xiǎn)”,F(xiàn)5的輸入端的特征描述為“明確當(dāng)前C輪航向航速、周圍交通狀況、天氣等信息”。針對(duì)特征描述,既可以了解容易導(dǎo)致事故的消極因素,同時(shí)也能夠得到促進(jìn)系統(tǒng)平穩(wěn)運(yùn)行的積極因素,因此可從多主體多角度出發(fā)提高系統(tǒng)安全性。如值班人員要積極履行值班責(zé)任,系統(tǒng)觀察船舶所處環(huán)境,觀察本船所處水域交通狀況,熟悉周圍水域內(nèi)的船舶情況,制定適宜的安全航行路線,并要觀察和獲知實(shí)時(shí)天氣水文信息,分析風(fēng)和流對(duì)本船航行產(chǎn)生的影響,以免在不知情的情況下偏離安全航行路線,發(fā)生不必要的危險(xiǎn);船舶公司要對(duì)各值班人員的責(zé)任進(jìn)行明確細(xì)致的劃分,負(fù)責(zé)規(guī)范船員值班行為。
4 結(jié) 論
(1) 本文利用FRAM-FAHP法分析某船舶碰撞事故的致因,確定了影響船舶系統(tǒng)安全性的主要失效鏈接,可為降低船舶碰撞風(fēng)險(xiǎn)提供參考,同時(shí)也可以利用該方法分析其他類型的海上事故。針對(duì)不同類型事故,可建立對(duì)應(yīng)的事故功能共振分析模型,并根據(jù)本文的分析過程找出影響事故的主要因素,進(jìn)而提出相應(yīng)的屏障措施來規(guī)避風(fēng)險(xiǎn)。
(2) 運(yùn)用模糊層次分析方法可以解決功能共振分析方法無法量化并識(shí)別容易失效的主要鏈接的問題。明確鏈接的重要度排序之后,可有針對(duì)性地制定系統(tǒng)屏障措施。這些鏈接既可以看作是系統(tǒng)的擾動(dòng),也可以看作是系統(tǒng)的機(jī)遇。對(duì)于擾動(dòng),要制定防御措施來預(yù)防擾動(dòng)出現(xiàn);對(duì)于機(jī)遇,要制定優(yōu)化措施使得系統(tǒng)更加穩(wěn)定。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
中國科技論壇(2017年7期)2017-07-25 08:49:53
軟件導(dǎo)刊(2016年9期)2016-11-07 21:35:42
通信電源技術(shù)(2016年5期)2016-03-22 01:09:49
石油知識(shí)(2016年2期)2016-02-28 16:20:16
自動(dòng)化儀表(2015年11期)2015-04-01 01:02:40
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年22期)2014-03-01 04:32:55
