斗提式散糧卸船機(jī)提升裝置振動(dòng)特性研究
2021-03-05 10:00:04李永祥靳航嘉王明旭
機(jī)械設(shè)計(jì)與制造 2021年2期
李永祥,靳航嘉,王明旭,李 陽(yáng)
(河南工業(yè)大學(xué)機(jī)電工程學(xué)院,河南 鄭州 450001)
1 引言
我國(guó)人口數(shù)量眾多,人民對(duì)高品質(zhì)糧食需求量越來(lái)越大。我國(guó)糧食已經(jīng)不能自給自足,需要大量進(jìn)口糧食來(lái)彌補(bǔ)供需缺口。同時(shí)大量農(nóng)村勞動(dòng)力向城市轉(zhuǎn)移,未來(lái)糧食供需缺口有不斷擴(kuò)大趨。進(jìn)口糧主要以海運(yùn)為主,卸船機(jī)在港口散糧接卸發(fā)揮主要作用。目前港口用于散糧的卸船機(jī)可分為間歇式和連續(xù)式兩種,類型較多,各有優(yōu)劣[1]。連續(xù)式卸船機(jī)的類型與物料垂直提升的方式關(guān)聯(lián)密切。在物料的垂直提升方式中,斗提機(jī)在提升同樣的高度時(shí),輸送路程最短,效率高、無(wú)揚(yáng)塵等諸多優(yōu)點(diǎn)。因此斗提式散糧卸船就具有更大優(yōu)勢(shì)。
卸船機(jī)工作時(shí),由于振動(dòng)源以及設(shè)備本身結(jié)構(gòu)布局,再加上海邊風(fēng)浪等因素的作用,容易使提升部分發(fā)生振動(dòng),影響糧食提升效率,縮短設(shè)備的使用壽命。因此對(duì)這種新型的斗提式散糧卸船機(jī)的動(dòng)力學(xué)特性進(jìn)行研究十分必要。
2 斗提式散糧卸船機(jī)工作原理
斗提式散糧卸船機(jī)示意圖[2],如圖1 所示。斗提機(jī)在新型卸船機(jī)中的工作狀態(tài)有別于傳統(tǒng)斗提機(jī),在工作時(shí),需要根據(jù)船艙內(nèi)糧面的高度,調(diào)整俯仰角度,因此整個(gè)提升裝置上部與桁架鉸鏈接,下部無(wú)固定鏈接,斗提機(jī)處于懸臂狀態(tài)。會(huì)因下部螺旋喂料和海邊風(fēng)浪等因素而發(fā)生振動(dòng),懸臂梁的主要振動(dòng)形式也是彎曲振動(dòng)。因此,針對(duì)卸船機(jī)提升裝置的彎曲振動(dòng)特性進(jìn)行研究非常重要。

圖1 斗提式散糧卸船機(jī)示意圖Fig.1 Schematic Diagram of Bucket Elevator Type Bulk Grain Ship Unloader
3 斗提式卸船機(jī)提升段彎曲剛度分析
斗提式卸船機(jī)提升段截面為中心對(duì)稱圖形,如圖2 所示。

圖2 提升段截面簡(jiǎn)圖Fig.2 Sketch of the Cross Section of the Lifting Section
設(shè)寬為B,長(zhǎng)為L(zhǎng),每塊側(cè)板厚度為b,將截面整體按從上之下,從左至右劃分為I,II,III,IV,V,VI,6 個(gè)矩形部分。以提升段截面形心為原點(diǎn)建立坐標(biāo)系xCy,y1和z1為慣性主軸
矩形I:


θ 值可以確定主慣性軸y1和z1的位置,繼而可求得截面對(duì)于主慣性軸y1和z1的慣性矩:

如果驅(qū)動(dòng)彎矩與主慣性軸z1同向,彎曲剛度kg為:

式中:E—提升段材料的彈性模量;H—提升段高度。
斗提機(jī)外殼的主要材料是結(jié)構(gòu)鋼,彈性模量E=200GPa,
本設(shè)計(jì)的斗提機(jī)截面尺寸參數(shù),如表1 所示。

表1 提升段截面尺寸參數(shù)Tab.1 Dimensions of the Lifting Section
將表1 中數(shù)據(jù)帶入式(3),可算得:Iy=3.1890×10-2m4;Iz=6.0129×10-2m4帶入式(4)可得:Iy1=6.0129×10-2m4;Iz1=3.1890×10-2m4帶入式(6)可得:kg=4.0199×108N/m
4 提升裝置彎曲振動(dòng)理論
4.1 提升段動(dòng)力學(xué)方程
對(duì)提升裝置彎曲振動(dòng)進(jìn)行研究,將斗提機(jī)簡(jiǎn)化為豎直懸臂梁,將喂料裝置簡(jiǎn)化為端部質(zhì)量塊,簡(jiǎn)化后模型,如圖3 所示。豎直高度為H,E 為提升段材料的彈性模量,I 為提升段橫截面的對(duì)于形心軸的二次截面距,豎直懸臂梁?jiǎn)挝婚L(zhǎng)度的質(zhì)量為m,質(zhì)量塊的質(zhì)量為m0。圖中:Fs和F右—微元左右端面所受的剪力;M 和M右—微元左右
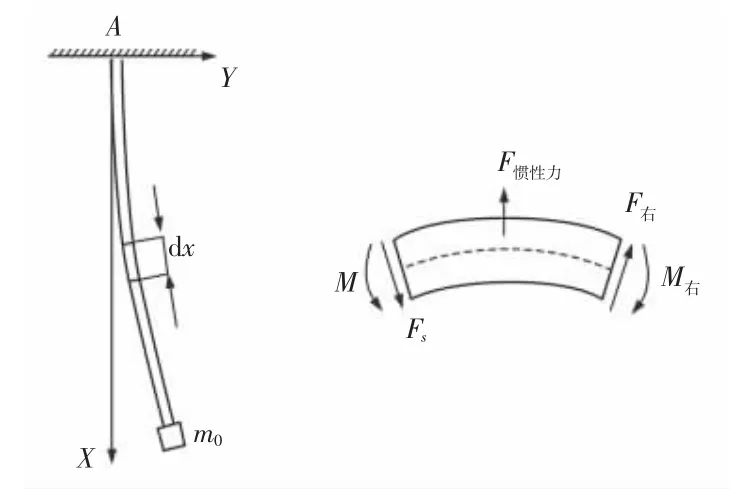
圖3 提升段微元?jiǎng)討B(tài)平衡示意圖Fig.3 Schematic Diagram of Dynamic Balance of Lifting Segment Micro-Element
端面彎矩,微元的慣性力為F慣性力,用y(x,t)表示距原點(diǎn)x
處的截面在t 時(shí)刻的橫向位移,則有:



可建立動(dòng)力平衡方程:右截面力矩平衡方程:忽略高階小量,由彎矩與撓度的關(guān)系,得到動(dòng)力學(xué)方程:

梁的主振動(dòng)[3]可假設(shè)為:

將式(13)帶入式(12)中,得:

由高等數(shù)學(xué)可知,上式通解為:

C1、C2、C3、C4可以通過(guò)豎直懸臂梁的邊界條件來(lái)確定。
4.2 邊界條件
懸臂梁邊界條件由端部的約束條件來(lái)確定,卸船機(jī)提裝置的邊界條件為:固定約束的端面的撓度曲率和位移為0。

確定提升裝置自由端邊界條件時(shí),下部自由端有質(zhì)量塊連接,可以對(duì)質(zhì)量塊進(jìn)行受力分析,如圖4 所示。

圖4 質(zhì)量塊受力分析Fig.4 Force Analysis of Mass
圖中:FH—豎直懸臂梁端面對(duì)質(zhì)量塊的力,將質(zhì)量塊的重力m0g沿質(zhì)量塊運(yùn)動(dòng)方向和垂直運(yùn)動(dòng)方向分解,分別為m0gsinβ 和m0gcosβ,力的作用點(diǎn)為質(zhì)量塊的質(zhì)心。
質(zhì)量塊的在運(yùn)動(dòng)方向上的動(dòng)力平衡方程為:

上文中已經(jīng)假設(shè)提升裝置在豎直平面內(nèi)做微幅振動(dòng),所以β 角非常小,m0gsinβ 趨近于0,可忽略不計(jì),可得:

4.3 提升裝置固有頻率和振型
所以,可以得出懸臂梁在自由端的邊界條件為:彎矩為零,剪切力與質(zhì)量塊慣性力平衡,故:


由固定端邊界條件,可得:由自由端的邊界條件,并令ψ2=EIτ4,可得:

由C1、C2有非零解得,得出頻率方程:

式中:m0/m梁—自由端質(zhì)量塊與豎直懸臂梁質(zhì)量之比,對(duì)于本次設(shè)計(jì)的提升裝置,m0/m梁=0.3463306。
利用MATLAB 對(duì)式(23)進(jìn)行求解,令x=τH,將式(23)分為M=-(m0/m梁)x(sinxcoshx-cosxsinhx)和N=cosxcoshx+1 兩個(gè)方程,用x=x+0.0001 依次遞增0.0001 的方式循環(huán)帶入兩個(gè)方程中,當(dāng)|N-M|≤0.001 時(shí)輸出x 值。程序如下:

求得前四階值分別為:x1=1.6925;x2=3.3624;x3=12.1251;x4=17.7802,可以得出系統(tǒng)前四階固有頻率:

由上文算得截面矩,再由m=m梁/H,H=19m,m梁=24782.45kg,算得前四階固有頻率:

5 仿真驗(yàn)證及誤差來(lái)源分析
為了驗(yàn)證上述理論結(jié)果的可靠性,使用ANSYS 對(duì)提升裝置懸臂梁結(jié)構(gòu)進(jìn)行模態(tài)分析,同樣得出此結(jié)構(gòu)彎曲振動(dòng)的固有頻率和振型,并與理論結(jié)果進(jìn)行對(duì)比分析[4-5],步驟包括:首建立了提升裝置三維模型,將喂料裝置視為端部質(zhì)量塊,皮帶、畚斗視為小質(zhì)量塊,并忽略螺栓、螺母。設(shè)置材料屬性,設(shè)置約束,并求解。結(jié)果如圖5、表2 所示。

圖5 提升裝置前四階模態(tài)振型Fig.5 The First Four Modes of the Lifting Device

表2 理論值與仿真結(jié)果對(duì)比Tab.2 Comparison of Theoretical and Simulated Values
從表2 可以看出裝置固有頻率的理論計(jì)算值與仿真結(jié)果值誤差在5%以下,誤差主要來(lái)源有以下幾點(diǎn):
(1)確定自由端邊界條件時(shí),忽略了微幅振動(dòng)時(shí)質(zhì)量塊自重的影響。
(2)整個(gè)提升段結(jié)構(gòu)并非是均勻一體的,而是由多段結(jié)構(gòu)通過(guò)法蘭連接在一起。導(dǎo)致理論模型和仿真模型的偏差。
(3)理論計(jì)算時(shí)以提升高度作為豎直梁的高度,仿真分析時(shí)要略大于此值,導(dǎo)致理論值偏大。
(4)MATLAB 求解時(shí),精確度為0.001,結(jié)果存在誤差。
6 結(jié)論
卸船機(jī)提升裝置的主要振動(dòng)形式為彎曲振動(dòng)。從理論上計(jì)算了提升段等效彎曲剛度。利用微元法建立了提升段彎曲振動(dòng)的動(dòng)力學(xué)方程,通過(guò)對(duì)端部質(zhì)量塊的力學(xué)分析,確定了彎曲振動(dòng)的邊界條件,得出了彎曲振動(dòng)的頻率方程。利用MATLAB 求解頻率方程,得出了提升裝置彎曲振動(dòng)的前四階固有頻率,分別為:0.5971Hz、1.1863Hz、4.2777Hz 和6.2729Hz。使用ANSYS 對(duì)提升裝置進(jìn)行模態(tài)仿真,得到了前四階固有頻率和振型。從理論結(jié)果和仿真結(jié)果對(duì)比來(lái)看,誤差值在5%以下,理論結(jié)果具有可靠性。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
當(dāng)代陜西(2022年5期)2022-04-19 12:10:18
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2021年12期)2021-12-31 03:23:08
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
汕頭大學(xué)學(xué)報(bào)(自然科學(xué)版)(2020年4期)2020-12-14 07:05:00
中學(xué)生數(shù)理化·中考版(2020年10期)2020-11-27 01:59:48
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
中國(guó)生殖健康(2019年2期)2019-08-23 08:12:08
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
